车辆系统动力学(2)_半车模型的推导及分析
- 格式:doc
- 大小:283.86 KB
- 文档页数:7
可编辑修改精选全文完整版车辆系统动力学车辆系统动力学是一门涉及汽车系统的动力性研究的学科,旨在分析和模拟汽车的动力性能。
它是由应用力学和流体力学原理来研究动态特性,从而为汽车开发工程人员提供关键性信息和支持,以实现车辆系统的有效运行。
车辆系统动力学的研究分为两个主要方面:静动力学和结构动力学。
静动力学是研究汽车静力学和动力学系统,以及它们之间的相互作用。
静动力学的研究内容包括汽车的刚性构件的静力学计算,汽车转矩和加速度的动态测定,车辆悬架系统的构造、测量和控制,动力性能的行驶特性测定,以及汽车的操纵和漂移特性的研究。
结构动力学包括研究汽车结构,如悬架、底盘和发动机,以及这些系统的动态特性测定。
车辆系统动力学的研究可以分为三个主要领域:实验动力学、分析动力学和仿真动力学。
实验动力学主要负责试验机械结构以及机械系统的动力特性测定。
它可以分析出机械系统的动力特性,以及机械系统和动力学分析模型之间的关系。
分析动力学是通过数学分析的方法,计算和分析汽车的动力特性。
仿真动力学则使用计算机模拟技术,模拟汽车在不同行驶条件下的性能,并进行动力学和控制分析。
车辆系统动力学是一个复杂的研究领域,需要广泛的原理、理论和技术来支持。
它为车辆开发工程人员提供关键的研究信息,以便更好地了解汽车的动力性能,从而更好地解决汽车发动机、悬架和底盘等系统的限制问题,实现更低排放、更安全的汽车运行。
车辆系统动力学的研究目标是提高汽车的动力性能:提高燃油经济性、排放控制效果,降低汽车维护成本,延长汽车使用寿命,减少汽车故障发生率,并提高汽车在不同地形环境下的行驶质量。
未来,随着新技术的发展,车辆系统动力学的研究将不断进步,为汽车的改进和开发提供可靠的技术支持。
从而,车辆系统动力学是一门跨学科领域的非常重要的研究领域,它不仅涉及传统的汽车工程学科,还涉及力学、控制、物理、流体、电子、计算机等学科,是一门复杂而又有应用前景的学科。
因此,车辆系统动力学是汽车研发、维护和诊断的重要基础,也是汽车系统安全、经济、高效运行的关键。
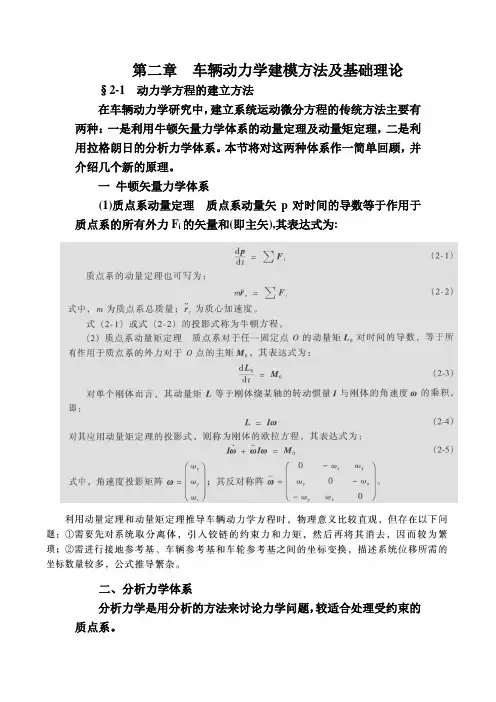
第二章车辆动力学建模方法及基础理论§2-1 动力学方程的建立方法在车辆动力学研究中,建立系统运动微分方程的传统方法主要有两种:一是利用牛顿矢量力学体系的动量定理及动量矩定理,二是利用拉格朗日的分析力学体系。
本节将对这两种体系作一简单回顾,并介绍几个新的原理。
一牛顿矢量力学体系(1)质点系动量定理质点系动量矢p对时间的导数等于作用于质点系的所有外力F i的矢量和(即主矢),其表达式为:二、分析力学体系分析力学是用分析的方法来讨论力学问题,较适合处理受约束的质点系。
(1)动力学普遍方程动力学普遍方程由拉格朗日(Lagrange)于1760年给出的,方程建立的基本依据是虚位移原理,表示如下:(2-6)(2)拉格朗日方程拉格朗日法的基本思想是将系统的总动能和总势能均以系统变量的形式表示,然后将其代入拉格朗日方程,再对其求偏导数,即可得到系统的运动方程。
拉格朗日方程形式如下:利用此方程推导车辆动力学方程时,因采用广义坐标,从而使描述系统位移的坐标数量大大减少,并可以自动消去无功内力。
但也存在下述问题:①应用拉格朗日方程时,有赖于广义坐标选取得是否得当,而适当地选择广义坐标有时要靠经验;②拉格朗日能量函数对于刚体系统的表达式可能非常复杂,代人拉格朗日方程后要作大量运算。
而对于复杂的车辆系统,写出能量函数的表达式就更加困难。
三、虚功率原理若丹(Jourdain)于1908年推导出另一种形式的动力学普遍方程,其所依据的原理称之为虚功率原理。
虚功率形式的动力学普遍方程为:四、高斯原理1829年,高斯(Gauss)提出动力学普遍方程的又一形式,称为高斯原理,其表达式为:§2-2 非完整系统动力学一、非完整系统动力学简介1894年,德国学者Henz第一次将约束系统分成“完整”和“非完整”两大类,从此开辟了非完整系统动力学(Nonholonomie System)的新领域,如今它已成为分析力学的一个重要分支。
Apollo 控制算法中使用的车辆动力学模型的推导过程动力学主要研究作用于物体的力与物体运动的关系。
车辆动力学模型一般用于分析车辆的平顺性和车辆操纵的稳定性。
对于车来说,研究车辆动力学,主要是研究车辆轮胎及其相关部件的受力情况。
比如纵向速度控制,通过控制轮胎转速实现;
横向航向控制,通过控制轮胎转角实现。
正常情况下,车辆上的作用力沿着三个不同的轴分布:
纵轴上的力包括驱动力和制动力,以及滚动阻力和拖拽阻力作滚摆运动;。
车辆的运动学模型和动⼒学模型系统建模是系统控制的前提和基础,对于⽆⼈车的横向控制(控制车辆转向,使其沿期望路径⾏驶),通过对车辆模型进⾏合理的简化和解耦,建⽴合适的车辆模型,对实现⽆⼈车的路径跟踪⾄关重要。
所谓车辆模型,即描述车辆运动状态的模型,⼀般可分为两类:运动学车辆模型;动⼒学车辆模型。
研究表明,在低速时,车辆的运动学特性较为突出;⽽在⾼速时,车辆的动⼒学特性对⾃⾝的运动状态影响较⼤。
1、运动学车辆模型车辆运动学模型如下图所⽰。
车辆运动学模型这⾥假定车辆是⼀个刚体,根据上图所⽰的⼏何关系,可以得到下⾯的车辆运动学数学模型。
运动学模型的数学公式其中,x0 和 y0 表⽰车辆质⼼的位置,v 为质⼼的纵向速度,r 为车辆的横摆⾓速度,Ψ为车辆的航向⾓,β为车辆的质⼼侧偏⾓。
在低速情况下,车辆在垂直⽅向的运动通常可以忽略,也即车辆的质⼼侧偏⾓为零,车辆的结构就像⾃⾏车⼀样,因此上述模型可以简化⼀个⾃⾏车模型,如下图所⽰:⾃⾏车模型整个模型的控制量可以简化为 v 和δ,即纵向车速和前轮偏⾓。
通常车辆的转向控制量为⽅向盘⾓度,因此需要根据转向传动⽐,将前轮偏⾓转化为⽅向盘⾓度。
上述的⾃⾏车车辆模型适⽤范围⾮常⼴,可以解决⼤部分问题。
但当车辆⾼速⾏驶时,使⽤简单的⼆⾃由度车辆模型通常⽆法满⾜横向控制的精确性和稳定性,这时就需要⽤到车辆的动⼒学模型。
2、动⼒学车辆模型汽车实际的动⼒学特性⾮常复杂,为精确描述车辆的运⾏状态,相关研究学者提出了多种多⾃由度的动⼒学模型。
不过,复杂的车辆动⼒学模型虽然较好的反映车辆的实际运动状态,但并不适⽤于⽆⼈车的横向控制。
其中,单轨模型是⼀个应⽤⽐较多的动⼒学车辆模型。
单轨模型是在忽略了空⽓动⼒学、车辆悬架系统、转向系统等的基础上,将前后轮分别⽤⼀个等效的前轮和后轮来代替,从⽽得到的车辆模型。
单轨模型的具体受⼒分析如下图所⽰。
单轨模型上图中的车⾝坐标系oxy,是以车辆质⼼为坐标原点,以沿车⾝向前的⽅向为x的正⽅向,以垂直于横轴的向左的⽅向为y的正⽅向。
车辆动力学模型推导概述及解释说明1. 引言1.1 概述本文旨在介绍车辆动力学模型推导的相关内容。
车辆动力学模型是研究汽车运动时所遵循的物理规律的数学表达式,通过建立和分析这些模型,可以深入了解车辆运动过程中涉及的各种参数和因素,并且为设计、控制和优化车辆性能提供有效依据。
1.2 文章结构本文共包括五个部分。
引言部分对文章进行概述,并介绍各部分内容安排。
第二部分将探讨车辆动力学模型推导的理论基础、参数定义以及模型假设。
第三部分将详细描述动力学模型的数学建立与推导过程,包括前提假设与约束条件说明、基本方程推导过程以及对动力学模型的解释与说明。
第四部分将通过实例分析介绍具体应用场景,并进行可行性分析和结果对比评估。
最后一部分是结论与展望,总结研究内容重点,展望未来研究方向以及对成果应用前景进行分析。
1.3 目的目前,随着社会科技的不断发展和人们对汽车性能的不断追求,对于车辆动力学模型推导的需求日益增加。
本文的目的是系统地介绍车辆动力学模型推导的相关理论和方法,以帮助读者更好地理解和应用这些模型。
此外,通过实例分析与应用场景探讨,也旨在展示动力学模型在实际问题中的应用价值,并提供未来研究方向和成果应用前景的思考。
2. 车辆动力学模型推导:2.1 理论基础:车辆动力学是研究车辆在不同路况条件下的运动规律的一门学科。
它主要涉及到车辆的加速度、速度和位移等运动参数。
在车辆动力学模型推导中,我们需要建立一组数学方程来描述车辆运动的规律性和物理特性。
2.2 动力学参数定义:在推导车辆动力学模型之前,首先需要定义一些重要的参数。
这些参数包括车辆质量、惯性矩阵、轮胎摩擦系数以及驱动力等。
这些参数对于建立准确的车辆动力学模型非常重要,并且可以通过实验或者工程估算得到。
2.3 模型假设:在推导车辆动力学模型时,通常会做出一定的假设,以简化问题并减少计算复杂度。
例如,我们可能会假设车辆是刚体、忽略空气阻力、平均考虑轮胎与地面之间的接触等。
车辆二自由度模型的推导1. 引言车辆是我们日常生活中经常接触到的一种交通工具,了解车辆的运动特性对于设计和优化车辆具有重要意义。
在车辆动力学中,二自由度模型是经典的描述车辆运动的数学模型。
本文将以推导车辆二自由度模型为主题,详细介绍推导的过程和相关理论知识。
2. 基本假设在推导车辆二自由度模型之前,我们需要明确一些基本假设。
首先,我们假设车辆是刚体,忽略了车体的弹性变形。
其次,我们假设车辆是平面运动的,不考虑三维空间中的运动。
最后,我们假设车辆沿着一条直线运动,不考虑转弯等复杂运动。
3. 推导过程3.1 车辆运动的描述为了推导车辆的运动方程,我们首先需要建立车辆的运动描述。
在车辆动力学中,通常使用车体的侧偏角和横向偏角来描述车辆的运动状态。
侧偏角(Yaw Angle)表示车辆相对于纵向轴线的旋转角度,用ϕ表示。
横向偏角(Lateral Displacement)表示车辆沿横向轴线的位移距离,用y表示。
车体的侧偏角和横向偏角的变化率分别为ϕ和ẏ。
我们还需要引入车辆的速度和转角,车辆的速度分为纵向速度和横向速度,分别用v x和v y表示。
车辆的转角用δ表示。
3.2 动力学方程的推导车辆的动力学方程描述了车辆运动的力学关系。
在车辆动力学中,我们通常考虑车辆的纵向运动和横向运动。
3.2.1 纵向运动在纵向运动中,车辆受到的力主要包括驱动力和阻力。
假设车辆的质量为m,驱动力为F r,阻力为F d。
根据牛顿第二定律,纵向运动的动力学方程可以表示为:mẍ=F r−F d其中,ẍ表示车辆纵向加速度。
3.2.2 横向运动在横向运动中,车辆受到的力主要包括前轮的侧向力和纵向力,以及车辆自身重力的作用。
假设前轮的侧向力为F y,纵向力为F x,车辆质心高度为ℎ,车辆重力为mg。
根据牛顿第二定律,横向运动的动力学方程可以表示为:mÿ=F y+F x−mg3.2.3 前轮侧向力和纵向力的计算前轮的侧向力和纵向力与车辆的转角δ和速度v有关。

汽车系统动力学的发展现状仲鲁泉2014020326摘要:汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有汽车在垂直和横向两个方面的动力学内容。
介绍车辆动力学建模的基础理论、轮胎力学及汽车空气动力学基础之外,重点介绍了受汽车发动机、传动系统、制动系统影响的驱动动力学和制动动力学,以及行驶动力学和操纵动力学内容。
本文主要讲述的是通过对轮胎和悬架的系统动力学研究,来探究汽车系统动力学的发展现状。
关键词:轮胎;悬架;系统动力学;现状0 前言汽车系统动力学是讨论动态系统的数学模型和响应的学科。
它是把汽车看做一个动态系统,对其进行研究,讨论数学模型和响应。
是研究汽车的力与其汽车运动之间的相互关系,找出汽车的主要性能的内在联系,提出汽车设计参数选取的原则和依据。
车辆动力学是近代发展起来的一门新兴学科。
有关车辆行驶振动分析的理论研究,最早可以追溯到100年前。
事实上,知道20世纪20年代,人们对车辆行驶中的振动问题才开始有初步的了解;到20世纪30年代,英国的Lanchester、美国的Olley、法国的Broulhiet开始了车辆独立悬架的研究,并对转向运动学和悬架运动学对车辆性能的影响进行了分析。
开始出现有关转向、稳定性、悬架方面的文章。
同时,人们对轮胎侧向动力学的重要性也开始有所认识。
在过去的70多年中,车辆动力学在理论和实际应用方面也都取得了很多成就。
在新车型的设计开发中,汽车制造商不仅依靠功能强大的计算机软件,更重要的是具有丰富测试经验和高超主观评价技能的工程师队伍。
在随后的20年中,车辆动力学的进展甚微。
进入20世纪50年代,可谓进入了一个车辆操纵动力学发展的“黄金时期”。
这期间建立了较为完整的车辆操纵动力学线性域(即侧向加速度约小于0.3g)理论体系。
随后有关行驶动力学的进一步发展,是在完善的测量和计算手段出现后才得以实现。
人们对车辆动力学理解的进程中,理论和试验两方面因素均发挥了作用。
车辆系统动力学报告
车辆系统动力学报告是对车辆的动力学性能进行分析和评估的报告。
动力学是研究物体在运动过程中的力学性质和力学规律的学科,车
辆动力学则是研究车辆运动的力学性质和规律。
车辆系统动力学报告一般包括以下内容:
1. 车辆运动学分析:对车辆的运动状态进行分析,包括位移、速度、加速度等参数的计算和分析。
2. 动力学模型建立:建立车辆的动力学模型,包括车辆的质量、惯性、摩擦等参数的确定。
3. 动力学性能评估:根据动力学模型,对车辆的动力学性能进行评估,例如加速度、制动距离、悬挂系统的稳定性等。
1
4. 动力学优化设计:根据动力学性能评估结果,对车辆的设计进行优化,从而提高车辆的动力学性能。
5. 动力学仿真分析:通过使用动力学仿真软件,对车辆的动力学性能进行模拟和分析,从而预测车辆在不同工况下的行驶性能。
6. 动力学实验验证:通过实际的测试和测量,验证动力学模型和仿真结果的准确性,进而提供更可靠的动力学性能评估结果。
总之,车辆系统动力学报告旨在分析和评估车辆的动力学性能,并提出优化设计建议,以提高车辆的运动性能和安全性。
2。
车辆侧倾动力学模型推导
车辆侧倾动力学模型的推导过程较为复杂,下面是一个简化的推导过程:
假设条件:
- 推导公式中一律为车身坐标系,并采用右手系;
- 前轮转角$\delta$较小。
推导过程:
轮胎侧偏力与侧偏角的关系为:
$F_y=k_y\delta$
其中,$F_y$为轮胎侧偏力,$k_y$为轮胎侧偏刚度,$\delta$为侧偏角。
当车辆发生侧倾时,车身会相对地发生侧向倾斜,使法向力在左、右轮间重新分配,影响着弹性轮胎的侧偏特性,还引起前轮定位参数发生变化以及侧倾转向,从而影响汽车稳态及瞬间转向特性等。
车辆侧倾动力学模型的建立需要综合考虑多种因素,并且需要进行大量的实验验证和参数调整。
如果你需要更详细的信息,建议你咨询相关的汽车工程专家或者查阅相关的学术文献。
汽车横向动力学模型推导过程
汽车横向动力学模型是研究汽车在行驶过程中的侧向运动特性的数学模型。
它通过描述车辆的侧向运动方程,来分析车辆在转弯、横向加速等情况下的行驶性能。
下面将从车辆的侧向力、横向加速度和车辆的稳定性等方面,来介绍汽车横向动力学模型的推导过程。
一、车辆的侧向力
车辆在转弯或横向加速时,轮胎与地面之间会产生侧向力。
侧向力可以分为横向力和法向力两个分量。
横向力是垂直于车辆的运动方向的力,它使车辆产生侧向加速度;法向力是垂直于地面的力,它支撑着车辆的重力。
二、横向加速度
横向加速度是描述车辆在横向运动时的加速度大小,它与车辆的侧向力和车辆的质量有关。
根据牛顿第二定律,车辆的横向加速度等于车辆的侧向力除以车辆的质量。
三、车辆的稳定性
车辆的稳定性是指车辆在转弯或横向加速时保持平衡的能力。
车辆的稳定性与车辆的质心高度、轴距、重心位置等因素有关。
当车辆的质心高度较低、轴距较大、重心位置较低时,车辆的稳定性较好。
四、车辆的横向动力学模型
汽车横向动力学模型是基于上述车辆的侧向力、横向加速度和车辆
的稳定性等因素建立起来的数学模型。
它可以描述车辆在转弯或横向加速时的运动特性。
汽车横向动力学模型是通过分析车辆的侧向力、横向加速度和车辆的稳定性等因素,来推导出车辆在转弯或横向加速时的运动特性的数学模型。
这个模型可以帮助我们更好地理解车辆的横向运动特性,为汽车设计和操控提供参考。
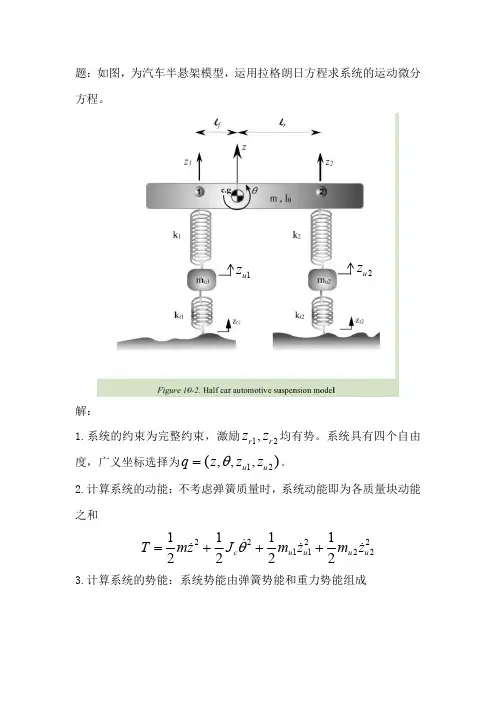
题目:在Matlab 环境下,推导半车模型的运动方程并进行响应分析。
假设车身是刚体,并具有垂直和俯仰两个自由度,要求得出半车模型的系统响应功率谱密度和响应函数。
推导过程:
设车身质心垂向振动量为b Z ,俯仰角为b θ,则有如下运动方程组:
r
f b hp r f b hb r tr wr f f tf wf bF aF I F F z m Fr z z K z
m F z z K z m +-=+=--=--=θ )()(303101
将b b b b b z z a z z θθ+=-=42,以及
)()()()(43432121z z
C z z K F z z C z z K F sr sr r sf sf f -+-=-+-=
代入上面运动方程组,将4321z z z z 、、、作为状态变量,即][43
2
1
z z z z Z =,
]0*0*[00r
tr f tf z K z K B =,可得到状态方程:
''B AZ =
矩阵B 中含有前轮输入和后轮输入的耦合,假设后轮所行驶的轨迹为前轮在时间段t ∆前行驶过的轨迹,且
u L t /=∆,既有如下关系:
t i f e Z t Z z ωω000)sin(==
u L i f u L i t i r e z e Z u L t Z t t Z z /0/0000)/sin()](sin[ωωωωωω--==-=∆-=
因此,可将B 改写为
f u
L i tr tf
z e K K B 0/*]00[ω-=
而矩阵A 通过化简,得到其为:
⎥⎥
⎥⎥⎥⎦⎤
⎢⎢
⎢⎢⎢
⎣
⎡++-+-++---+++-++-++-+---+++-)()
()
()(00)()
()()(0
323222221212sr sr sr sr sf sf sf sf sr
sr sr
sr tr wr sr sr sr sr sf sf sf sf sf sf sf
sf tf wf C i K n C i K n C i K n C i K n C i K C i K K m C i K n C i K n C i K n C i K n C i K C i K K m ωωωωωωωωωωωωωωωω
其中,hp
hb hp hb hp hb I b m n I ab m n I a m n 2
32211,1,1+
=-=+= 感想: 这次作业比较难,所以很多地方借鉴了别人的想法。
我觉得主要难点在于把时域模型转换成频域模型,十分抽象不好理解,这涉及到傅里叶变换,采用现代
控制理论的状态空间表达式,建立状态方程进行求解。
在MATLAB 中编程调试了很久,才和书上的图例基本保持一致,验证了我的推导和分析是正确的。
示意图来拍于书上,同时从规范性考虑,上述推导过程中所列公式均采用公式编辑器完成。
附件: 含有Matlab 代码的M 文件
半车模型的系统响应功率谱密度和响应函数(共5张图)
Clc
Clear all
close all
mhb=690;
Ihp=1222;
mwf=40.5;
mwr=45.4;
Ktf=192e3;
Ktr=192e3;
Ksf=17e3;
Ksr=22e3;
Csf=1.5e3;
Csr=1.5e3;
a=1.25;b=1.51;L=2.76;v=20;
a1=1/mhb+a^2/Ihp ;b1=1/mhb-a *b/Ihp ;c1=1/mhb+b^2/Ihp;
for i=1:150
f(i)=i/10;%频率
omega=2*pi*f(i);
s=(4.47e-4)/(f(i)^2.5);%路面输入
A=[Ktf+Ksf-omega^2*mwf+1j*Csf*omega,-Ksf-1j*Csf*omega,0,0;
a1*(Ksf+1j*Csf*omega),omega^2+a1*(-Ksf-1j*Csf*omega),b1*(Ksr+1j*Csr*omega),b1*(-Ksr-1j*Csr*omega);
0,0,-omega^2*mwr+Ktr+Ksr+1j*omega*Csr,-Ksr-1j*Csr*omega;
b1*(Ksf+1j*Csf*omega),b1*(-Ksf-1j*Csf*omega),c1*(Ksr+1j*Csr*omega),c1*(-Ksr-1j*Csr*omega)+omega^2];
B=[Ktf;0; Ktr *exp(-1j* omega* L/v);0];
Z=A\B;
f_susp_pmd(i)=s*abs(Z(2)-Z(1))^2;%前悬架动行程功率谱密度
r_susp_pmd(i)=s*abs(Z(4)-Z(3))^2;%后悬架动行程功率谱密度
f_a(i)=(-omega)^2*abs(Z(2));%求前轮簧载质量加速度增益
r_a(i)=(-omega)^2*abs(Z(4));%求后轮簧载质量加速度增益
cg_a(i)=abs(-omega^2*Z(2) *b-omega^2*Z(4)*a)/L;%求质心处垂向加速度增益
f_a_pmd(i)=s*f_a(i)^2;%前轮簧载质量垂向加速度功率谱密度
r_a_pmd(i)=s*r_a(i)^2;%后轮簧戟质量垂向加速度功率谱密度
cg_a_pmd(i)=s*abs(cg_a(i))^2;%质心簧载质量垂向加速度功率谱密度
f_tire_pmd(i)=s*(Ktf/1000*abs(Z(1)-1))^2;%前轮轮胎动载荷功率谱密度
r_tire_pmd(i)=s*(Ktr/1000*abs(Z(3)-exp(-1j* omega* L/v)))^2;%后轮轮胎动载荷功率谱密度thb(i)=abs(atan(Z(4)-Z(2))/L)*180/pi;%求俯仰角增益
if f(i)<1
jq=10^(-0.6);
elseif f(i)>=1&&f(i)<=4
jq=10^((3*log2(f(i))-6)/10);
elseif f(i)>4&&f(i)<8
jq=1;
else
jq=10^((-6*log2(f(i))+18)/10);%加权系数
end
jqf_a_pmd(i)=jq* f_a_pmd(i);%经加权后的前轮垂向载荷功率谱密度
jqr_a_pmd(i)=jq*r_a_pmd(i);
jqcg_a_pmd(i)=jq* cg_a_pmd(i);
end
figure(1)
plot(f,f_susp_pmd,'b',f,r_susp_pmd,'--r');legend('前轮','后轮');
xlabel('频/Hz');
ylabel('悬架动行程功率谱密度(m^2/Hz');
figure(2)
plot(f,jqf_a_pmd,'b',f,jqr_a_pmd,'--r',f,jqcg_a_pmd,':k');legend('前轮','后轮','质心'); xlabel('频率Hz');
ylabel('垂向加速度功率谱密度/[(m/s^2)Hz]');
figure(3)
plot(f, f_tire_pmd,'b', f, r_tire_pmd,'--r');legend('前轮','后轮');
xlabel('频率Hz');
ylabel('轮胎动载荷功率谱密度/(kN^2/Hz)');
figure(4)
plot(f,cg_a);
xlabel('频率Hz');
ylabel('质心处垂向加速度增益/[(m/s^2)/m]');
figure(5)
plot(f,thb);
xlabel('频率Hz');
ylabel('俯仰角增益/[(°)/m]');。