模糊PID控制器的设计与仿真——设计步骤
- 格式:docx
- 大小:212.10 KB
- 文档页数:7
模糊自整定PID 控制系统设计与仿真—— 俯仰姿态保持模糊PID 控制一、目的熟悉模糊自整定控制系统的组成原理。
掌握模糊控制原理及模糊控制规则的生成。
了解模糊控制规则对控制效果的影响。
掌握模糊方法及Matlab 实现。
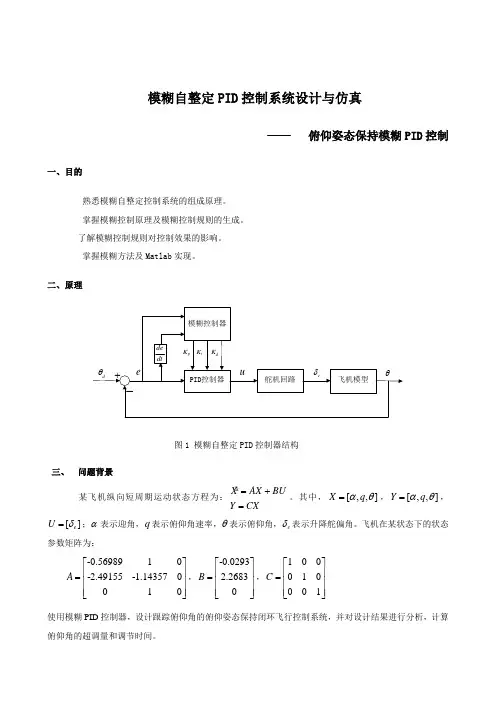
二、原理图1 模糊自整定PID 控制器结构三、 问题背景某飞机纵向短周期运动状态方程为:XA XB U YC X=+= 。
其中,[,,]X q αθ=,[,,]Y q αθ=,[]e U δ=;α表示迎角,q 表示俯仰角速率,θ表示俯仰角,e δ表示升降舵偏角。
飞机在某状态下的状态参数矩阵为: -0.5698910-2.49155-1.143570010A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,-0.02932.26830B ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,10001001C ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦使用模糊PID 控制器,设计跟踪俯仰角的俯仰姿态保持闭环飞行控制系统,并对设计结果进行分析,计算俯仰角的超调量和调节时间。
俯仰姿态保持是将飞机保持在给定的俯仰姿态c θ,或者可以称为参考模态REF θ,它是由驾驶员根据某种飞行状态(水平飞行、爬升、下滑)的需要而建立的,控制系统接通后就力图保持这种姿态为常值,其原理框图如图所示。
俯仰姿态保持框图该模态的主要被控变量是俯仰姿态角,传感器是一个姿态参考陀螺。
其本身一般只在飞机水平飞行状态和短时间下滑、爬升状态下使用。
由于攻角会随飞行状态发生变化,所以在该模态下航迹倾斜角不会保持常值。
于是,如果增加推力,α将有降低的趋势,并且飞机会爬升;随着飞机重量的减轻,α也会减小,也会引起飞机逐渐爬升。
类似地,随着空气密度的降低引起α增加,爬升的飞机会逐渐改平。
将俯仰姿态角作为被控变量,除了能改变飞行轨迹之外还能用来改变空速。
由于这些特性,俯仰姿态保持常作为其它工作方式的基本控制器。
例如飞机在各种不同高度巡航飞行、稳态爬升及自动着陆时,都要求保持相应的俯仰姿态角,继而达到控制和保持所要求的飞行轨迹的目的。
自适应模糊PID控制器的设计与仿真自适应模糊PID控制器是一种结合了模糊控制和PID控制的自适应控制器,它能够在系统的不同工况下根据实际需求对PID参数进行自适应调整,从而使得系统具有更好的动态性能和稳定性。
本文将介绍自适应模糊PID控制器的设计思路和仿真过程。
1.设计思路1.1系统建模首先需要对待控制的系统进行建模,得到系统的数学模型。
这可以通过实验数据或者理论分析来完成。
一般情况下,系统的数学模型可以表示为:$G(s)=\frac{Y(s)}{U(s)}=\frac{K}{s(Ts+1)}$其中,K是系统的增益,T是系统的时间常数。
1.2设计模糊控制器接下来需要设计模糊控制器,包括模糊规则、模糊集和模糊运算等。
模糊控制器的输入是系统的误差和误差的变化率,输出是PID参数的调整量。
1.3设计PID控制器在模糊控制器的基础上,设计PID控制器。
PID控制器的输入是模糊控制器的输出,输出是控制信号。
1.4设计自适应机制引入自适应机制,根据系统的性能指标对PID参数进行自适应调整。
一般可以采用Lyapunov函数进行系统性能的分析和优化。
2.仿真过程在仿真中,可以使用常见的控制系统仿真软件,如MATLAB/Simulink 等。
具体的仿真过程如下:2.1设置仿真模型根据系统的数学模型,在仿真软件中设置仿真模型。
包括系统的输入、输出、误差计算、控制信号计算等。
2.2设置模糊控制器根据设计思路中的模糊控制器设计,设置模糊控制器的输入和输出,并设置模糊规则、模糊集和模糊运算等参数。
2.3设置PID控制器在模糊控制器的基础上,设置PID控制器的输入和输出,并设置PID参数的初始值。
2.4设置自适应机制设置自适应机制,根据系统的性能指标进行PID参数的自适应调整。
2.5运行仿真运行仿真,观察系统的响应特性和PID参数的变化情况。
根据仿真结果可以对设计进行调整和优化。
3.结果分析根据仿真结果,可以分析系统的稳定性、动态性能和鲁棒性等指标,并对设计进行调整和改进。
基于神经网络的模糊PID控制器设计与实现随着科技的不断发展,控制技术在工业自动化中的应用越来越广泛。
PID控制器因其简单易懂、易实现的特点而被广泛使用,但是传统的PID控制器在某些场合下会出现失效的情况。
为了解决这一问题,研究者们开始着手开发基于神经网络的模糊PID控制器。
本文将介绍基于神经网络的模糊PID控制器的设计与实现。
一、控制器介绍基于神经网络的模糊PID控制器是一种新型的控制器,它将模糊控制的优点与神经网络的处理能力相结合,形成了一种高效的自适应控制器。
该控制器利用神经网络的学习算法实现自适应参数的调节,将模糊控制中的模糊规则与神经网络的处理能力相结合,形成一种新的控制方法。
该控制器的核心思想是利用神经网络对系统进行建模,通过学习算法自适应地调节系统参数,从而实现对系统的控制。
其中,模糊控制器用于对输出进行模糊处理,神经网络用于对输入和输出进行处理,从而实现对系统的控制。
二、控制器设计基于神经网络的模糊PID控制器的设计需要以下几个步骤:1.系统建模系统建模是设计基于神经网络的模糊PID控制器的第一步。
系统建模的目的是构建系统的数学模型,以便于后续的设计过程。
在建模过程中,需要考虑系统的类型、运动方程、非线性因素等因素。
2.控制器设计控制器的设计是基于神经网络的模糊PID控制器设计的核心。
控制器的设计包括神经网络的结构设计、神经网络权值的选择、模糊控制的设计等。
3.参数调节参数调节是控制器设计的重要环节。
由于系统的运动方程等因素的影响,不同系统的参数可能不同。
因此,在实际应用中需要根据实际情况对控制器进行参数调节。
三、控制器实现基于神经网络的模糊PID控制器的实现需要以下步骤:1.数据采集数据采集是基于神经网络的模糊PID控制器实现的第一步。
数据采集的目的是获取系统的输入输出,以便为神经网络提供数据。
2.神经网络训练神经网络训练是实现控制器的关键步骤。
在训练过程中,通过对神经网络进行学习,让它逐渐对系统的输入输出进行建模。
模糊PID控制原理与设计步骤1.模糊化输入:将输入量通过模糊化过程,将其转化为隶属度函数形式,用来描述输入数量的各个级别或水平。
2.模糊化输出:同样地,将输出量也通过模糊化过程,转化为隶属度函数形式。
3.模糊化规则库:根据经验和专家知识,建立一组模糊规则,用来描述输入与输出之间的关系。
4.基于规则库的推理:根据输入的隶属度函数和规则库,通过隶属度的逻辑运算进行推理,得到输出的隶属度函数。
5.解模糊化:将输出的隶属度函数转化为具体的输出量,可以采用常用的解模糊化方法,如最大隶属度法、面积法等。
1.系统建模:首先需要对被控对象进行建模,得到其输入-输出关系。
可以基于部分局部建模或物理建模进行分析和确定。
2.设计模糊控制器的输入和输出:根据系统的特性和要求,确定模糊控制器的输入和输出。
- 输入通常包括误差(error)和误差的变化率(change in error)等。
-输出通常为控制量,可为模糊量或一阶量。
3.确定输入和输出的隶属度函数:确定输入和输出的隶属度函数形式,并根据实际情况进行参数调整。
通常可以选择三角形、梯形或高斯型函数等。
4. 设计模糊规则库:根据经验和专家知识,建立模糊规则库。
规则库的设计需要包括合理的覆盖边界和均匀的分布。
可以使用专家系统、模糊C-Means聚类等方法进行规则库的构建。
5.制定模糊推理机制:确定模糊推理的方法,常用的有最小最大法、剪切平均法等。
根据输入的隶属度函数和规则库,进行隶属度的逻辑运算和推理,得到输出的隶属度函数。
6.解模糊化:根据规则库,将模糊输出转化为具体的控制量。
可以采用最大隶属度法、面积法等方法进行解模糊化。
7.验证和调整:将设计好的模糊PID控制器应用到实际系统中,进行运行和调整。
根据实际反馈信号,对模糊规则库进行优化和调整,以提高控制系统的性能和稳定性。
总结:模糊PID控制是一种基于模糊逻辑和PID控制相结合的控制方法,能够更好地应对非线性、时变和模糊的控制系统。
模糊PID控制原理与设计步骤模糊PID控制(Fuzzy PID control)是在PID控制基础上引入了模糊逻辑的一种控制方法。
相比传统的PID控制,模糊PID控制能够更好地适应系统的非线性、时变和不确定性等特点,提高系统的性能和鲁棒性。
设计步骤:1.确定系统的模型和控制目标:首先需要对待控制的系统进行建模,确定系统的数学模型,包括系统的输入、输出和动态特性等。
同时,需要明确控制目标,即系统应达到的期望状态或性能指标。
2.设计模糊控制器的输入和输出变量:根据系统的特性和控制目标,确定模糊控制器的输入和输出变量。
输入变量通常为系统的误差、误差变化率和累积误差,输出变量为控制力。
3.确定模糊集和模糊规则:对于每个输入和输出变量,需要确定其模糊集和模糊规则。
模糊集用于将实际变量映射为模糊集合,如“大、中、小”等;模糊规则用于描述输入变量与输出变量之间的关系,通常采用IF-THEN形式,如“IF误差大AND误差变化率中THEN控制力小”。
4.编写模糊推理和模糊控制算法:根据确定的模糊集和模糊规则,编写模糊推理和模糊控制算法。
模糊推理算法用于根据输入变量和模糊规则进行推理,生成模糊的输出变量;模糊控制算法用于将模糊的输出变量转化为具体的控制力。
5.调试和优化:根据系统的实际情况,调试和优化模糊PID控制器的参数。
可以通过试错法或专家经验等方式对模糊集、模糊规则和模糊函数等进行调整,以达到较好的控制效果。
6.实施和验证:将调试完成的模糊PID控制器应用到实际系统中,并进行验证。
通过监控系统的实际输出和期望输出,对模糊PID控制器的性能进行评估和调整。
总结:模糊PID控制是一种将模糊逻辑引入PID控制的方法,能够有效地提高系统的性能和鲁棒性。
设计模糊PID控制器的步骤主要包括确定系统模型和控制目标、设计模糊控制器的输入输出变量、确定模糊集和模糊规则、编写模糊推理和模糊控制算法、调试和优化以及实施和验证。
通过这些步骤,可以设计出较为优化的模糊PID控制器来实现系统的控制。
模糊PID控制器设计PID控制器是一种常用的自动控制算法,广泛应用于各种工业过程中。
在实际应用过程中,由于系统的复杂性和非线性等原因,常常需要设计模糊PID控制器来提高系统的鲁棒性和控制性能。
1.确定系统的控制目标和性能指标:首先需要明确系统的控制目标,例如稳定性、响应速度、抗扰性等,然后确定对应的性能指标,例如超调量、调整时间、稳态误差等。
2.建立模糊控制规则库:根据系统的特性和控制目标,设计一套模糊控制规则库。
规则库一般包括模糊化、模糊规则以及解模糊化三个部分。
-模糊化:将输入目标和输入量经过模糊化,得到模糊量化值。
常见的模糊化方法有隶属函数法和三角函数法等。
- 模糊规则:根据经验规则和专家知识,设计一系列的模糊规则。
模糊规则一般采用if-then的形式,其中if部分是输入量模糊化后的模糊量化值,then部分是输出量的模糊量化值。
-解模糊化:将模糊量化值转化为具体的控制量。
常见的解模糊化方法有最大值法、加权平均法和中心平均法等。
3.设计模糊推理机制:模糊控制器的核心是模糊推理机制,通过模糊推理机制来根据输入的模糊量化值和模糊规则库来得到输出的模糊量化值。
常见的模糊推理机制有模糊与运算和模糊或运算等。
4.调整模糊PID控制器参数:根据系统的特性和性能指标,通过试验或者仿真的方法,对模糊PID控制器的参数进行优化调整。
一般可以采用遗传算法、粒子群算法等优化算法来进行参数调整。
5.实时控制和优化:将设计好的模糊PID控制器实时应用于控制系统中,并根据系统的反馈信号对控制器进行实时优化和参数调整,以达到更好的控制性能。
模糊PID控制器相比传统的PID控制器具有更好的鲁棒性和适应性,可以应对各种复杂、非线性的工业控制系统,提高控制精度和控制性能。
在实际应用中,需要根据具体的系统特性和性能需求来设计合适的模糊PID控制器,并经过实验和调整来优化控制效果。
同时,也需要考虑到计算复杂度和实时性等因素,确保控制系统的稳定性和可靠性。
模糊PID 控制器设计及仿真张三自动化学院10级1班学号摘要: 提出了高动态性能切换模糊PID 控制器设计方法。
通过对传统PID 控制中比例控制和微分控制作用的分析, 结合模糊PID 控制器鲁棒性能和自适应性好的优点, 设计了一类新的模糊控制器。
由于该类控制器先后经历比例控制, 微分控制和模糊PID 控制的切换, 使被控系统不仅具有一般模糊PID 控制器的所具有的良好的鲁棒性能和自适应性, 而且与一般模糊控制器相比具有更小的超调量和调节时间。
关键词: 模糊PID 控制器, 仿真1引言论算法是基于对过去、现在、未来的信息进行综合和估计的一种简单的控制算法, 是一种基于偏差的控制方式。
PID控制器以其算法简单,计算量小,使用方便,鲁棒性较强等优点而得到广泛应用,并取得了良好的控制效果。
但是对于一些时变和非线性的系统常规PID就显得无能为力了。
常规PID控制参数的最佳调整还未实现自动化,依靠人工凑试的整定方法不仅需要丰富的经验和技巧,而且十分费时。
同时,在实际控制系统控制过程中,由于噪声、负载扰动和其他一些环境条件变化的影响,受控过程参数,模型结构均将发生变化。
在这种情况下,采用常规PID 控制器难以获得满意的控制效果,而模糊控制不依赖被控对象精确的数学模型,是在总结操作经验基础上实现自动控制的一种手段。
本文应用模糊推理的方法实现对PID参数的在线自动整定,并依此设计出一般控制系统的模糊参数自整定PID控制器。
基于MATLAB的仿真结果表明与常规PID控制系统相比,该设计能获得更优的鲁棒性和动、静态性及具有良好的自适应性。
2PID控制器的设计及仿真2.1经典PID控制器本经典PID 控制器的传递函数可描述为:G( s) =Kp+KDs+KI /s控制器输入为e( t) =yr ( t) - y( t), 其中yr 为系统参考输入, y为系统输出, 控制器输出为控制量u。
由于比例控制的作用是使动态相应加快, Kp 越大速度越快, 但过大会使系统出现超调甚至使系统不稳定; 微分控制主要是抑制超调; 模糊控制使系统有更好的鲁棒性和自适应性。
关于模糊PID控制器的应用设计模糊PID控制器是一种能够对系统进行自动调节的控制器,它能够根据系统的不确定性和非线性特性进行自适应调节,从而实现更精确的控制。
模糊PID控制器的应用非常广泛,可以用于各种工业过程的控制,例如温度控制、速度控制和压力控制等。
在设计模糊PID控制器的应用时,需要进行以下几个步骤:1.系统建模:首先需要对所控制的系统进行建模,包括收集和分析系统的输入输出数据。
通过这些数据可以获得系统的数学模型,有助于后续的控制器设计。
2. 设计模糊控制器:设计模糊控制器的关键是确定输入和输出的隶属函数,以及规则库。
输入隶属函数一般包括误差(e)、误差变化率(de)和输出变化率(du)等,输出隶属函数则表示系统的控制输出。
规则库是根据经验确定的,它包含了一系列的if-then规则,用于决定输出量。
例如,如果误差较大且误差变化率较小,则输出量增大。
3.系统优化:通过实际控制试验,对模糊PID控制器进行调试和优化。
调试的目标是使系统的性能达到设计要求,例如精度、稳定性和响应速度等。
4.系统应用:将优化后的模糊PID控制器应用于实际系统,观察和分析控制效果。
如果效果良好,则可以继续应用到实际工程中。
模糊PID控制器的应用可以提供精确的控制效果,并且对于一些非线性系统和不确定性的系统具有良好的鲁棒性。
例如,在温度控制中,模糊PID控制器可以自动调节加热功率和冷却功率,使得温度能够稳定地控制在设定值附近。
在速度控制方面,模糊PID控制器可以根据不同的工况和负载变化自动调整电机的转速,确保控制精度和性能。
然而,模糊PID控制器也存在一些局限性。
首先,模糊PID控制器的设计需要大量的经验和试验,对于一些复杂的系统,设计可能较为困难。
其次,模糊PID控制器对于系统的建模要求较高,需要事先对系统有一定的了解和分析。
综上所述,模糊PID控制器是一种实用的控制器,具有广泛的应用前景。
在应用设计过程中,需要进行系统建模、模糊控制器设计、系统优化和系统应用等步骤,并注意控制器设计的可行性和稳定性。
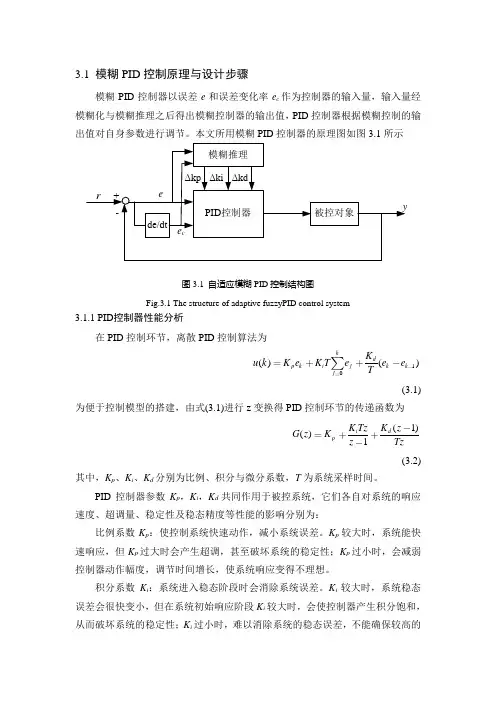
3.1 模糊PID 控制原理与设计步骤模糊PID 控制器以误差e 和误差变化率e c 作为控制器的输入量,输入量经模糊化与模糊推理之后得出模糊控制器的输出值,PID 控制器根据模糊控制的输出值对自身参数进行调节。
本文所用模糊PID 控制器的原理图如图3.1所示图3.1 自适应模糊PID 控制结构图Fig.3.1 The structure of adaptive fuzzyPID control system3.1.1 PID 控制器性能分析在PID 控制环节,离散PID 控制算法为10()()kdp k i jk k j K u k K e K Te e e T(3.1)为便于控制模型的搭建,由式(3.1)进行z 变换得PID 控制环节的传递函数为(1)()1i d pK Tz K z G z K z Tz(3.2)其中,K p 、K i 、K d 分别为比例、积分与微分系数,T 为系统采样时间。
PID 控制器参数K p ,K i ,K d 共同作用于被控系统,它们各自对系统的响应速度、超调量、稳定性及稳态精度等性能的影响分别为:比例系数K p :使控制系统快速动作,减小系统误差。
K p 较大时,系统能快速响应,但K p 过大时会产生超调,甚至破坏系统的稳定性;K p 过小时,会减弱控制器动作幅度,调节时间增长,使系统响应变得不理想。
积分系数K i :系统进入稳态阶段时会消除系统误差。
K i 较大时,系统稳态误差会很快变小,但在系统初始响应阶段K i 较大时,会使控制器产生积分饱和,从而破坏系统的稳定性;K i 过小时,难以消除系统的稳态误差,不能确保较高的调节精度。
微分系数K d:提高系统的动态响应性能,会在系统响应过程中对偏差的变化进行提前预测,从而抑制偏差的变化。
K d过大时,会使系统响应作用减弱,从而使调节时间增长,而且会降低系统的抗干扰性能。
PID控制参数的调节必须考虑不同时刻它们各自对系统性能的影响及相互之间的互联关系。
模糊PID 控制器的设计与仿真设计模糊PID 控制器时,首先要将精确量转换为模糊量,并且要把转换后的模糊量映射到模糊控制论域当中,这个过程就是精确量模糊化的过程。
模糊化的主要功能就是将输入量精确值转换成为一个模糊变量的值,最终形成一个模糊集合。
本次设计系统的精确量包括以下变量:变化量e ,变化量的变化速率ec 还有参数整定过程中的输出量ΔK P ,ΔK D ,ΔK I ,在设计模糊PID 的过程中,需要将这些精确量转换成为模糊论域上的模糊值。
本系统的误差与误差变化率的模糊论域与基本论域为:E=[-6,-4,-2,0,2,4,6];Ec=[-6,-4,-2,0,2,4,6]。
模糊PID 控制器的设计选用二维模糊控制器。
以给定值的偏差e 和偏差变化ec 为输入;ΔK P ,ΔK D ,ΔK I 为输出的自适应模糊PID 控制器,见图1。
图1模糊PID 控制器(1)模糊变量选取输入变量E 和EC 的模糊化将一定范围(基本论域)的输入变量映射到离散区间(论域)需要先验知识来确定输入变量的范围。
就本系统而言,设置语言变量取七个,分别为 NB ,NM ,NS ,ZO ,PS ,PM ,PB 。
(2)语言变量及隶属函数根据控制要求,对各个输入,输出变量作如下划定:e ,ec 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6} ΔK P ,ΔK D ,ΔK I 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}应用模糊合成推理PID 参数的整定算法。
第k 个采样时间的整定为 ).()(,)()(,)()(000k K K k K k K K k K k K K k K D D D I I I P P P ∆+=∆+=∆+= 式中000,,D I P K K K 为经典PID 控制器的初始参数。
设置输入变量隶属度函数如图2所示,输出变量隶属度函数如图3所示。
图2 输入变量隶属度函图3 输出变量隶属度函(3)编辑模糊规则库根据以上各输出参数的模糊规则表,可以归纳出49条控制逻辑规则,具体的控制规则如下所示:1.If (e is NB) and (ec is NB) then (kp is NB)(ki is PB)(kd is NS)(1)2.If (e is NB) and (ec is NM) then (kp is NB)(ki is PB)(kd is PS)(1)3.If (e is NB) and (ec is NS) then (kp is NM)(ki is PM)(kd is PB)(1)4.If (e is NB) and (ec is ZO) then (kp is NM)(ki is PM)(kd is PB)(1)5.If (e is NB) and (ec is PS) then (kp is NS)(ki is PS)(kd is PB)(1)6.If (e is NB) and (ec is PM) then (kp is ZO)(ki is ZO)(kd is PM)(1)7.If (e is NB) and (ec is PB) then (kp is ZO)(ki is ZO)(kd is NS)(1)8.If (e is NM) and (ec is NB) then (kp is NB)(ki is PB)(kd is NS)(1)9.If (e is NM) and (ec is NM) then (kp is NB)(ki is PB)(kd is PS)(1)10.If (e is NM) and (ec is NS) then (kp is NM)(ki is PM)(kd is PB)(1)11.If (e is NM) and (ec is ZO) then (kp is NS)(ki is PS)(kd is PM)(1)12.If (e is NM) and (ec is PS) then (kp is NS)(ki is PS)(kd is PM)(1)13.If (e is NM) and (ec is PM) then (kp is ZO)(ki is ZO)(kd is PS)(1)14.If (e is NM) and (ec is PB) then (kp is PS)(ki is ZO)(kd is ZO)(1)15.If (e is NS) and (ec is NB) then (kp is NM)(ki is PB)(kd is ZO)(1)16.If (e is NS) and (ec is NM) then (kp is NM)(ki is PM)(kd is PS)(1)17.If (e is NS) and (ec is NS) then (kp is NM)(ki is PS)(kd is PM)(1)18.If (e is NS) and (ec is ZO) then (kp is NS)(ki is PS)(kd is PM)(1)19.If (e is NS) and (ec is PS) then (kp is ZO)(ki is ZO)(kd is PS)(1)20.If (e is NS) and (ec is PM) then (kp is PS)(ki is NS)(kd is PS)(1)21.If (e is NS) and (ec is PB) then (kp is PS)(ki is NS)(kd is ZO)(1)22.If (e is ZO) and (ec is NB) then (kp is NM)(ki is PM)(kd is ZO)(1)23.If (e is ZO) and (ec is NM) then (kp is NM)(ki is PM)(kd is PS)(1)24.If (e is ZO) and (ec is NS) then (kp is NS)(ki is PS)(kd is PS)(1)25.If (e is ZO) and (ec is ZO) then (kp is ZO)(ki is ZO)(kd is PS)(1)26.If (e is ZO) and (ec is PS) then (kp is PS)(ki is NS)(kd is PS)(1)27.If (e is ZO) and (ec is PM) then (kp is PM)(ki is NM)(kd is PS)(1)28.If (e is ZO) and (ec is PB) then (kp is PM)(ki is NM)(kd is ZO)(1)29.If (e is PS) and (ec is NB) then (kp is NS)(ki is PM)(kd is ZO)(1)30.If (e is PS) and (ec is NM) then (kp is NS)(ki is PS)(kd is ZO)(1)31.If (e is PS) and (ec is NS) then (kp is ZO)(ki is ZO)(kd is ZO)(1)32.If (e is PS) and (ec is ZO) then (kp is PS)(ki is NS)(kd is ZO)(1)33.If (e is PS) and (ec is PS) then (kp is PS)(ki is NS)(kd is ZO)(1)34.If (e is PS) and (ec is PM) then (kp is PM)(ki is NM)(kd is ZO)(1)35.If (e is PS) and (ec is PB) then (kp is PM)(ki is NB)(kd is ZO)(1)36.If (e is PM) and (ec is NB) then (kp is NS)(ki is ZO)(kd is NB)(1)37.If (e is PM) and (ec is NM) then (kp is ZO)(ki is ZO)(kd is PS)(1)38.If (e is PM) and (ec is NS) then (kp is PS)(ki is NS)(kd is NS)(1)39.If (e is PM) and (ec is ZO) then (kp is PM)(ki is NS)(kd is NS)(1)40.If (e is PM) and (ec is PS) then (kp is PM)(ki is NM)(kd is NS)(1)41.If (e is PM) and (ec is PM) then (kp is PM)(ki is NB)(kd is NS)(1)42.If (e is PM) and (ec is PB) then (kp is PB)(ki is NB)(kd is NB)(1)43.If (e is PB) and (ec is NB) then (kp is ZO)(ki is ZO)(kd is NB)(1)44.If (e is PB) and (ec is NM) then (kp is ZO)(ki is ZO)(kd is NM)(1)45.If (e is PB) and (ec is NS) then (kp is PM)(ki is NS)(kd is NM)(1)46.If (e is PB) and (ec is ZO) then (kp is PM)(ki is NM)(kd is NM)(1)47.If (e is PB) and (ec is PS) then (kp is PM)(ki is NM)(kd is NS)(1)48.If (e is PB) and (ec is PM) then (kp is PB)(ki is NB)(kd is NS)(1)49.If (e is PB) and (ec is PB) then (kp is PB)(ki is NB)(kd is NB)(1) 把这49条控制逻辑规则,键入到模糊规则库中,如图4。
基于模糊PID控制的仿真设计1.引言在现实生活中,控制系统的设计和优化是非常重要的。
PID控制器是一种广泛应用的控制算法,通过调整比例、积分和微分三部分的权重,可以满足不同系统的控制需求。
然而,传统的PID控制器往往难以适应复杂的非线性系统,因此需要一种更灵活、自适应的控制算法。
模糊PID控制就是一种基于模糊逻辑的PID控制方法,它能够根据系统的实际情况自动调整PID参数,从而实现更好的控制效果。
2.模糊PID控制原理模糊PID控制的核心思想是利用模糊逻辑和模糊推理来实现参数的自适应调整。
具体来说,模糊PID控制器首先通过模糊化对系统误差进行模糊描述,然后利用模糊规则库进行模糊推理,得到相应的PID参数调整量,最后通过反模糊化将模糊输出转化为PID参数。
模糊PID控制器的输入是系统误差的变化率和变化量,输出是PID参数的调整量,通过不断迭代逐步优化PID参数,从而实现对系统的精确控制。
3.仿真设计为了验证模糊PID控制的效果,我们可以设计一个简单的控制系统进行仿真。
以水温控制为例,假设我们需要将水温控制在一个特定的设定值附近。
首先,我们需要搭建一个水温控制的仿真模型,包括水温传感器、水温控制器和加热器。
然后,我们可以利用MATLAB等仿真软件进行仿真实验。
在仿真实验中,我们可以设置初始化的PID参数和模糊规则库,然后根据水温的实时变化进行模糊化处理,得到模糊输出。
接下来,将模糊输出进行反模糊化处理,得到PID参数的调整量,并将其应用于PID控制器中。
通过不断迭代,不断优化PID参数,直到水温稳定在设定值附近。
4.结果与讨论通过对水温控制系统的仿真实验,我们可以得到模糊PID控制的控制曲线和误差曲线。
通过分析控制曲线和误差曲线,我们可以评估模糊PID控制的性能,并与传统的PID控制进行对比。
实验结果表明,相比于传统的PID控制算法,模糊PID控制具有更好的控制效果和适应性。
模糊PID控制能够根据系统的实际情况自动调整PID参数,从而实现更好的水温控制效果。
模糊自整定PID 控制系统设计与仿真 ——俯仰姿态保持模糊PID 控制一、设计内容1、模型与设计要求(1) 某飞机纵向短周期运动状态方程为:X AX BU Y CX=+=。
其中,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=θαq X ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=θαq Y ,[]e U δ=;表示迎角,表示俯仰角速率,表示俯仰角,表示升降舵偏角。
飞机在某状态下的状态参数矩阵为:-0.5698910-2.49155-1.143570010A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,-0.02932.26830B ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,100010001C ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 使用模糊PID 控制器,设计跟踪俯仰角的俯仰姿态保持闭环飞行控制系统,并对设计结果进行分析,计算俯仰角的超调量和调节时间。
(2)设计模糊控制规则。
(3)在MATLAB 下依据整定原理编写仿真程序并调试。
(4)给定输入为阶跃信号,运行程序,记录仿真数据和曲线。
(5)修改模糊控制规则,重复步骤4。
(6)分析数据和控制曲线。
2.报告要求(1)给出模糊控制器的设计过程和程序清单。
(2)记录仿真数据和曲线。
(3)分析仿真结果。
二、设计过程1.概述模糊PID 控制器有多种结构形式,但是工作原理基本一致,即运用模糊数学的基本原理和方法,把规则的条件、操作用模糊集来表示,把这些模糊控制规则以及相关的信息作为知识存入计算机的知识库中,然后计算机根据系统的实际响应运用模糊推理,可实现对PID 参数的最佳调整。
自适应模糊PID 控制器以误差和误差变化作为输入,可以满足不同时刻的和对PID 参数自整定的要求。
利用模糊控制规则在线对PID 参数进行修改,便构成了自适应模糊PID 控制器,其结构如图1所示。
图1 自适应模糊控制器结构PID 参数模糊自整定是找出PID 三个参数k p 、k i 、k d 与e 和ec 之间的模糊关系,在运行中通过不断检测和,根据模糊控制原理来对3个参数进行在线修改,以满足不同和时对控制参数的不同要求,而使被控对象有良好的动、静态性能。
模糊PID控制器设计和仿真步骤:各变量隶属度函数的确定第一步:各变量隶属度函数的确定1、 用于PID 参数调整的模糊控制器采用二输入三输出的形式。
该控制器是以误差E 和误差变化率EC 作为输入,PID 控制器的三个参数P、I、D 的修正△KP、△KI、△KD 作为输出,如图1;2、 取输入E 和EC 和输出△KP、 △KI、△KD 模糊子集为{NB,NM,NS,ZO,PS,PM,PB},其论域为[-6,6],量化等级为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};如图23、 在模糊逻辑工具箱的隶属度函数编辑器中,选择输入量E,EC 隶属函数为高斯型(gaussmf),输出△KP、△KI、△KD 的隶属函数为三角形(trimf),如图2和3。
图1图2图3第二步:根据图4规则建立模糊规则表,如图5:图4图5第三步:设置参数:与方式与方式 (And method)为min ;或方式(Or method)为max ;推理推理 (Implication)为min ;合成;合成 (Aggregation)为max ;去模糊(Defuzzification)为重心平均法(centroid )。
)。
第四步:保存该FIS 文件,取名为FuzzyPID.fis第五步:在MA MATLABTLAB 的M 文件编辑器里建立一个名为FuzzyPID.m 的文件,其内容为:martrix=readfis (‘Fuzzypid.fis ’),并运行。
,并运行。
第六步:打开SIMULINK ,新建一个Model ,选择一个Subsystem ,在其中编辑模块,如图6,并设置模糊化因子KE=KEC=0.01,解模糊因子KP=0.5,KI=KD=0.01,并在Fuzzy Logic Controller 模块的Parameters 中输入readfis('FuzzyPID.fis'):图6第七步:返回到新建的Model 中,按照如图7所示建立模糊PID 控制器,其中,控制器,其中,PID PID 初始值为KP0=20,KI0=1.35,KD0=3.7,传递函数为:图7第八步:保存为FuzzyPID.mdl 并运行。
模糊PID控制器的设计与仿真设计模糊PID控制器时,首先要将精确量转换为模糊量,并且要把转换后的模糊量映射到模糊控制论域当中,这个过程就是精确量模糊化的过程。
模糊化的主要功能就是将输入量精确值转换成为一个模糊变量的值,最终形成一个模糊集合。
本次设计系统的精确量包括以下变量:变化量e,变化量的变化速率ec还有参数整定过程中的输出量△ K P,△ K D,△ K,在设计模糊PID的过程中,需要将这些精确量转换成为模糊论域上的模糊值。
本系统的误差与误差变化率的模糊论域与基本论域为:E=[-6,-4,-2,0,2,4,6];Ec=[-6,-4,-2,0,2,4,6] 。
模糊PID控制器的设计选用二维模糊控制器。
以给定值的偏差e和偏差变化ec为输入;△ K P,△ K D,△ K为输出的自适应模糊PID控制器,见图1。
图1模糊PID控制器(1) 模糊变量选取输入变量E和EC的模糊化将一定范围(基本论域)的输入变量映射到离散区间(论域)需要先验知识来确定输入变量的范围。
就本系统而言,设置语言变量取七个,分别为NB, NM NS ZQ PS, PM PB(2) 语言变量及隶属函数根据控制要求,对各个输入,输出变量作如下划定:e,ec 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}△心,△ K D,△ K 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6} 应用模糊合成推理PID参数的整定算法。
第k个采样时间的整定为K p(k)二K p。
:K p(k) , Kdk)二K I。
水心),K°(k)二K D。
*D(k).式中K P0,K|0,K D0为经典PID控制器的初始参数设置输入变量隶属度函数如图2所示,输出变量隶属度函数如图 3所示 Membership Function Editor; fuzzyl File Edit ViewCurrent Van ableCurrent Membershiip Function (click on MF to select) Name e Name zoTypeinput TyP® gLaussmf vRange[-6 6]Params [0.B493 OJDisplay Range [-6 &]Ready图2输入变量隶属度函Membership Function Editor: fuz2y1File Edit View图3输出变量隶属度函(3) 编辑模糊规则库的控制规则如下所示:FIS v^riable& kikclMembership fuitctlon plots- otat oonis : 181FIS vulablas ec kiw htemi 祐活術p funaBon pkk 憎 “刃m ■肝咏 101根据以上各输出参数的模糊规则表,可以归纳出49条控制逻辑规则,具体1. If (e is NB) and (ec is NB) then (kp is NB)(ki is PB)(kd is NS)(1)2. If (e is NB) and (ec is NM) then (kp is NB)(ki is PB)(kd is PS)(1)3. If (e is NB) and (ec is NS) then (kp is NM)(ki is PM)(kd is PB)(1)4. If (e is NB) and (ec is ZO) then (kp is NM)(ki is PM)(kd is PB)(1)5. If (e is NB) and (ec is PS) then (kp is NS)(ki is PS)(kd is PB)(1)6. If (e is NB) and (ec is PM) then (kp is ZO)(ki is ZO)(kd is PM)(1)7. If (e is NB) and (ec is PB) then (kp is ZO)(ki is ZO)(kd is NS)(1)8. If (e is NM) and (ec is NB) then (kp is NB)(ki is PB)(kd is NS)(1)9. If (e is NM) and (ec is NM) then (kp is NB)(ki is PB)(kd is PS)(1)10. If (e is NM) and (ec is NS) then (kp is NM)(ki is PM)(kd is PB)(1)11. If (e is NM) and (ec is ZO) then (kp is NS)(ki is PS)(kd is PM)(1)12. If (e is NM) and (ec is PS) then (kp is NS)(ki is PS)(kd is PM)(1)13. If (e is NM) and (ec is PM) then (kp is ZO)(ki is ZO)(kd is PS)(1)14. If (e is NM) and (ec is PB) then (kp is PS)(ki is ZO)(kd is ZO)(1)15. If (e is NS) and (ec is NB) then (kp is NM)(ki is PB)(kd is ZO)(1)16. If (e is NS) and (ec is NM) then (kp is NM)(ki is PM)(kd is PS)(1)17. If (e is NS) and (ec is NS) then (kp is NM)(ki is PS)(kd is PM)(1)18. If (e is NS) and (ec is ZO) then (kp is NS)(ki is PS)(kd is PM)(1)19. If (e is NS) and (ec is PS) then (kp is ZO)(ki is ZO)(kd is PS)(1)20. If (e is NS) and (ec is PM) then (kp is PS)(ki is NS)(kd is PS)(1)21. If (e is NS) and (ec is PB) then (kp is PS)(ki is NS)(kd is ZO)(1)22. If (e is ZO) and (ec is NB) then (kp is NM)(ki is PM)(kd is ZO)(1)23. If (e is ZO) and (ec is NM) then (kp is NM)(ki is PM)(kd is PS)(1)24. If (e is ZO) and (ec is NS) then (kp is NS)(ki is PS)(kd is PS)(1)25. If (e is ZO) and (ec is ZO) then (kp is ZO)(ki is ZO)(kd is PS)(1)26. If (e is ZO) and (ec is PS) then (kp is PS)(ki is NS)(kd is PS)(1)27. If (e is ZO) and (ec is PM) then (kp is PM)(ki is NM)(kd is PS)(1)28. If (e is ZO) and (ec is PB) then (kp is PM)(ki is NM)(kd is ZO)(1)29. If (e is PS) and (ec is NB) then (kp is NS)(ki is PM)(kd is ZO)(1)30. If (e is PS) and (ec is NM) then (kp is NS)(ki is PS)(kd is ZO)(1)31. If (e is PS) and (ec is NS) then (kp is ZO)(ki is ZO)(kd is ZO)(1)32. If (e is PS) and (ec is ZO) then (kp is PS)(ki is NS)(kd is ZO)(1)33. If (e is PS) and (ec is PS) then (kp is PS)(ki is NS)(kd is ZO)(1)34. If (e is PS) and (ec is PM) then (kp is PM)(ki is NM)(kd is ZO)(1)35. If (e is PS) and (ec is PB) then (kp is PM)(ki is NB)(kd is ZO)(1)36. If (e is PM) and (ec is NB) then (kp is NS)(ki is ZO)(kd is NB)(1)37. If (e is PM) and (ec is NM) then (kp is ZO)(ki is ZO)(kd is PS)(1)38. If (e is PM) and (ec is NS) then (kp is PS)(ki is NS)(kd is NS)(1)39. If (e is PM) and (ec is ZO) then (kp is PM)(ki is NS)(kd is NS)(1)40. If (e is PM) and (ec is PS) then (kp is PM)(ki is NM)(kd is NS)(1)41. If (e is PM) and (ec is PM) then (kp is PM)(ki is NB)(kd is NS)(1)42. If (e is PM) and (ec is PB) then (kp is PB)(ki is NB)(kd is NB)(1)43. If (e is PB) and (ec is NB) then (kp is ZO)(ki is ZO)(kd is NB)(1)44. If (e is PB) and (ec is NM) then (kp is ZO)(ki is ZO)(kd is NM)(1)45. If (e is PB) and(ec is NS) t hen (kp is PM)(ki is NS)(kd is NM)(1)46. If (e is PB) and(ec is ZO) t hen (kp is PM)(ki is NM)(kd is NM)(1)47. If (e is PB) and(ec is PS) t hen (kp is PM)(ki is NM)(kd is NS)(1)48. If (e is PB) and(ec is PM)then (kp is PB)(ki is NB)(kd is NS)(1)49. If (e is PB) and(ec is PB) t hen (kp is PB)(ki is NB)(kd is NB)(1)把这49条控制逻辑规则,键入到模糊规则库中,如图4。