自动控制原理第3章 自动控制系统的时域分析
- 格式:ppt
- 大小:2.00 MB
- 文档页数:67
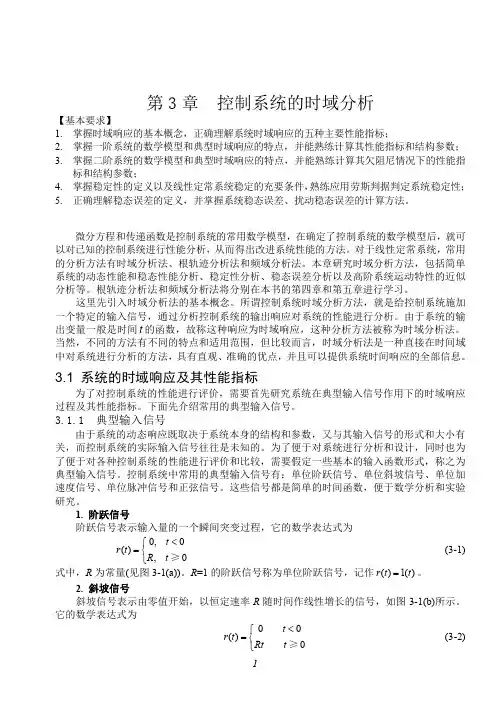
第3章 控制系统的时域分析【基本要求】1. 掌握时域响应的基本概念,正确理解系统时域响应的五种主要性能指标;2. 掌握一阶系统的数学模型和典型时域响应的特点,并能熟练计算其性能指标和结构参数;3. 掌握二阶系统的数学模型和典型时域响应的特点,并能熟练计算其欠阻尼情况下的性能指标和结构参数;4. 掌握稳定性的定义以及线性定常系统稳定的充要条件,熟练应用劳斯判据判定系统稳定性;5. 正确理解稳态误差的定义,并掌握系统稳态误差、扰动稳态误差的计算方法。
微分方程和传递函数是控制系统的常用数学模型,在确定了控制系统的数学模型后,就可以对已知的控制系统进行性能分析,从而得出改进系统性能的方法。
对于线性定常系统,常用的分析方法有时域分析法、根轨迹分析法和频域分析法。
本章研究时域分析方法,包括简单系统的动态性能和稳态性能分析、稳定性分析、稳态误差分析以及高阶系统运动特性的近似分析等。
根轨迹分析法和频域分析法将分别在本书的第四章和第五章进行学习。
这里先引入时域分析法的基本概念。
所谓控制系统时域分析方法,就是给控制系统施加一个特定的输入信号,通过分析控制系统的输出响应对系统的性能进行分析。
由于系统的输出变量一般是时间t 的函数,故称这种响应为时域响应,这种分析方法被称为时域分析法。
当然,不同的方法有不同的特点和适用范围,但比较而言,时域分析法是一种直接在时间域中对系统进行分析的方法,具有直观、准确的优点,并且可以提供系统时间响应的全部信息。
3.1 系统的时域响应及其性能指标为了对控制系统的性能进行评价,需要首先研究系统在典型输入信号作用下的时域响应过程及其性能指标。
下面先介绍常用的典型输入信号。
3.1.1 典型输入信号由于系统的动态响应既取决于系统本身的结构和参数,又与其输入信号的形式和大小有关,而控制系统的实际输入信号往往是未知的。
为了便于对系统进行分析和设计,同时也为了便于对各种控制系统的性能进行评价和比较,需要假定一些基本的输入函数形式,称之为典型输入信号。
第3章 自动控制系统的时域分析1.设单位反馈系统的开环传递函数分别为试确定使闭环系统稳定的开环增益K的数值范围(注意,K≠K*)。
解:(1)根据系统的开环传递函数可得闭环系统的特征方程为利用劳斯稳定判据来判定系统的稳定性,列出劳斯表如下所示:表3-1故使闭环系统稳定的增益K*的范围为故使闭环系统稳定的开环增益K的数值范围:(2)根据系统的开环传递函数可得系统的特征方程为利用劳斯稳定判据来判定系统的稳定性,列出劳斯表如下所示:表3-2欲使闭环系统稳定的增益K*的范围为故使闭环系统稳定的开环增益K的数值范围:K不存在。
2.给定典型二阶系统的设计指标:超调量σ%≤5%,调节时间,峰值时间试确定系统极点配置的区域,以获得预期的响应特性。
解:依题意综合以上条件可画出满足要求的特征根区域如图3-1中阴影部分所示。
图3-13.已知系统特征方程式如下,试求系统在s 右半平面的根数及虚根值。
解:(1)列出劳斯表如下所示:表3-3由于表中第一列元素的符号有两次改变,故系统在s 右半平面的根数为2,无虚根。
(2)列出劳斯表如下:表3-4由于表中第一列元素的符号有两次改变,故系统在s右半平面的根数为2,无虚根。
MATLAB 文本及仿真结果如下:MATLAB 程序:exe307.m系统的特征根为:4.仅靠调整参数无法稳定的系统,称为结构不稳定系统。
图3-2为液位控制系统结构图。
试判断该系统是否属于结构不稳定系统?若是,提出消除结构不稳的有效措施。
图3-2 液位控制系统结构图解:令,则闭环特征方程为由稳定性必要条件知,不论如何改变T m 和K 均不能使系统稳定,故该系统属结构不稳定系统。
可考虑采用如下两种措施:(1)用反馈K H 包围有积分的环节,如图3-3(a )和(b )所示。
①若采用图3-3(a )方案,则闭环特征方程变为图3-3用反馈包围有积分的环节由赫尔维茨或劳斯稳定判据知,适当选择参数T m ,K ,K H 满足不等式:可使闭环系统稳定。