CAN总线硬件设计
- 格式:pdf
- 大小:129.57 KB
- 文档页数:2
CAN总线数据通讯功能设计摘要:近年来,社会进步迅速,我国的智能化建设的发展也有了改善。
CAN(ControllerAreaNtework)即控制器局域网络,最初是由德国的BOSCH公司为汽车监测、控制系统而设计的。
现代汽车越来越多采用电子装置控制,如发动机的定时、注油控制、加速、刹车、自动泊车、倒车雷达及复杂的制动防抱死系统(ABS)等。
这些电子装置的控制需实时检测及交换大量的数据,仅使用传统点对点的连接方式来实现子系统之间的随机通信,不但繁琐、昂贵,且难以解决问题。
采用CAN总线上述问题就能得以很好的解决。
因为CAN总线为多主站总线,各节点可在任意时刻向网络上的其他节点发送信息,不分主次,通信灵活;采用短帧结构,数据传输时间短,最大传输数率可达1Mbps(通信距离小于40m)。
CAN总线技术由于高性能、高可靠性及其独特的设计备受人们的重视,经过十几年的发展,该技术已成为所有车载电子控制系统互联、互通的标准,广泛应用于汽车电子监测系统。
关键词:CAN总线;数据通讯;功能设计引言随着汽车的普及,人们对汽车舒适度要求越来越高,使得汽车电子技术发展迅速,越来越多的汽车电子控制单元(ElectronicControlUnit,ECU)被应用于汽车控制。
诊断功能的实现是ECU开发过程中的重要部分,对诊断功能进行集成测试是为了验证功能实现与设计规范的一致性。
1方案的实现电路主要由四个部分构成:微控制器、独立CAN通信控制器、CAN总线收发器、高速光耦。
微控制器负责CAN通信控制器的初始化。
CAN通信控制器有发送和接收两端,它能够同时读写总线,这个功能对于错误检测与总线仲裁都很重要,因此通过控制CAN通信控制器实现数据的接收和发送通讯任务。
CAN通信控制器要通过CAN总线收发器上的线驱动器和总线接口进行总线的读写,总线是通过典型的双绞线传输差分电压信号,处理CAN总线两端的节点应设置跨接在两根双绞线间的终端匹配电阻。
CAN总线工程师岗位职责
CAN总线工程师是指专门负责控制区域网络(Controller Area Network,简称CAN)总线的工程师。
CAN总线是一种全球通用的高
效率、低成本、高速度、总线型通讯系统,广泛应用于汽车电子控
制系统、工业制造自动化控制等领域。
CAN总线工程师的主要职责
如下:
1. CAN总线硬件设计:负责CAN总线硬件电路原理图的设计、
电路板的布局和制作,保证CAN总线硬件的稳定和可靠性。
2. CAN总线软件开发:负责CAN总线软件的开发、调试和维护,包括CAN通讯协议、CAN总线控制程序和设备驱动程序等。
3. CAN总线系统集成:负责将CAN总线与其他控制系统进行集成,实现数据的高效传输和流程的自动控制,确保整个系统的正常
运行。
4. CAN总线故障分析和解决:负责CAN总线的故障分析和解决,包括硬件故障、软件故障和通讯故障等,保证CAN总线系统的稳定
性和可靠性。
5. CAN总线系统的优化和升级:负责对CAN总线系统进行优化
和升级,提高系统的性能和可靠性,不断改进CAN总线系统的功能
和性能。
6. CAN总线系统的文档编写:负责编写CAN总线系统的技术文
档和用户手册,包括硬件原理图、软件流程图和用户指南等,方便
用户进行操作和维护。
总之,CAN总线工程师是负责CAN总线系统的设计、开发、调试和维护的专业人员,需要具备较高的电子技术、计算机技术和通信技术知识,同时具备较强的解决问题和沟通协调能力。
CAN总线多点温度采集节点硬件设计【摘要】随着科学技术的发展,温度监控系统的应用越来越广泛,本文阐述了一种基于CAN总线的多点温度采集系统,可以实现温度实时监测,该系统能应用于工农业生产的诸多场合。
系统以AT89C52单片机为微处理器,外接数字式温度传感器DS18B20获得现场环境的温度信号。
通过CAN总线控制器SJA1000和CAN总线驱动器PCA82C250将数据发送到CAN总线上,从而实现对温度的采集。
【关键词】CAN总线;节点;温度采集0 概述现场总线是安装在生产制造过程中的装置与控制室内的控制装置之间的一种数字式、串行、多点通信的数据线。
应用现场总线技术不仅可以降低系统的布线成本,还具有设计简单、调试方便等优点。
同时,由于现场总线本身还提供了灵活且功能强大的协议,这就使得用户对系统配置,设备选型具有强大的自主权,可以任意的将多种功能模块组合起来扩充系统的功能。
在众多的现场工业总线中。
随着温度控制技术在各个领域得到广泛地推广和应用,相关行业对温度控制技术的要求与日俱增。
目前市场上也有一些温度控制系统,但是这些系统在传送数据时实时性能实现的不是很好,而CAN总线的实时性强、成本低,而且还具备可靠性高、抗干扰强等特点。
综合多方面因素考虑,我们能够利用CAN总线的特点和优势设计温度控制系统。
1 设计方案1.1 系统功能要求系统能够接受数字式温度传感器DS18B20的温度信号,将温度信号传给单片机,完成单片机最小系统设计,并把此系统作为CAN的节点,节点的硬件包括AT89C52单片机、CAN总线驱动器PCA82C250、CAN总线控制器SJA1000、单片机的时钟和复位电路。
主要研究基于AT89C52单片机与DS18B20数字温度传感器的多点温度测量系统。
完成数字式温度传感器与CAN总线节点的接口设计及电路设计,实现具有数字式串行温度采集功能的CAN总线节点的硬件设计。
应用CAN总线控制器SJA1000及其总线收发器的工作原理,完成数字式温度传感器与CAN总线节点的接口设计。
上海交通大学硕士学位论文CAN总线通讯系统的软硬件设计和开发姓名:袁军申请学位级别:硕士专业:电子理论与新技术指导教师:贾学堂;唐厚君200302145、64K字节可在系统编程的FLASH存储器;6、4352(4096+256)字节的片内RAM;7、可寻址64K字节地址空间的外部数据存储器接口;8、硬件实现的SPI、SMBus/12C和两个UART串行接口:9、5个通用的165定时器:10、具有5个捕捉/lzl:较模块的可编程计数器/定时器阵列;1l、片内看门狗定时器、VDD监视器和温度传感器;具有片内VDD监视器、看门狗定时器和时钟振荡器的C8051F020是真『F能独立工作的片上系统。
所有模拟和数字外设均可由用户固件配置为使能或禁止。
FLASH存储器还具有在系统重新编程能力,可用于非易失性数据存储,并允许现场更新8051固件。
片内JTAG调试电路允许使用安装在最终应用系统上的产品MCU进行非侵入式(不占用片内资源)、全速、在系统调试。
该调试系统支持观察和修改存储器和寄存器,支持断点、观察点、单步运行和停机命令。
在使用JTAG调试时,所有的模拟和数字外设都可全功能运行。
每个Mcu都可在工业温度范围(.45至fJ+85内)用2.7V.3.6v的电压工作。
端1]I/0、/RST和JrI’AG引脚都容许5V的输入信号电压,C8051F020为100脚TQFP封装(见图3—8的框图)图3-8C8051F020的原理框图㈣9】Fi93—8BlockdiagramofC805IF020f14、基于CAN总线的DSP系统硬件设计在电机控制器中,使用的是11公司的DSP—TMS320F2407A,因此,我们设计了基于CAN总线的TMS320F2407A开发板,其系统结构框图如图3-9所示。
图3-9DSP开发板结构框图Fi93—9BlockdiagramofDSPdevelopboard该开发板以LF2407ADSP控制器为核心,运行速度高达40MIPS,一个指令周期仅为25ns。
手把手教你设计CAN总线系列讲座(2)—CAN总线智能节点的设计在远程测控系统中,都要通过传感器或其他测量装置获取环境或相关的输入参数,传送到处理器,经过一定的算法,做出相应的控制决策,启动执行机构对系统进行控制,基于CAN总线的测控系统将单个测控设备变成网络节点,将控制系统中所需的基本控制、运行参数修改、报警、显示和监控等功能分散到各个远程节点中。
因此总线上的节点应该具有总线通信功能和测控功能,这必然离不开微处理器。
我们把具有这类功能的节点叫智能节点。
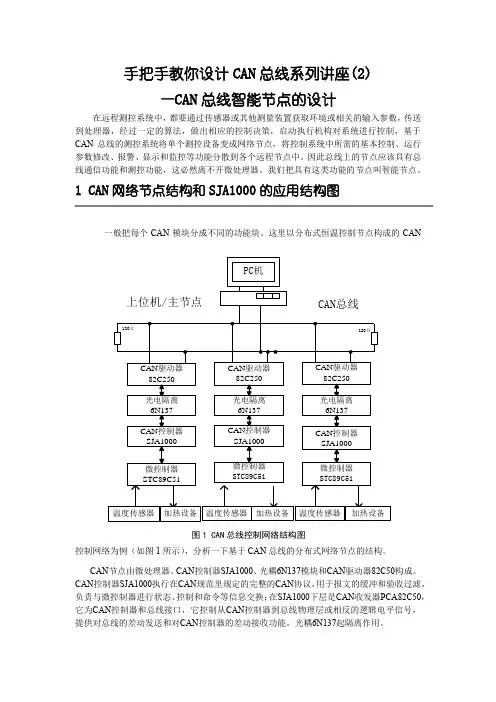
1 CAN网络节点结构和SJA1000的应用结构图一般把每个CAN模块分成不同的功能块。
这里以分布式恒温控制节点构成的CAN图1 CAN总线控制网络结构图控制网络为例(如图1所示),分析一下基于CAN总线的分布式网络节点的结构。
CAN节点由微处理器、CAN控制器SJA1000、光耦6N137模块和CAN驱动器82C50构成。
CAN控制器SJA1000执行在CAN规范里规定的完整的CAN协议,用于报文的缓冲和验收过滤,负责与微控制器进行状态、控制和命令等信息交换;在SJA1000下层是CAN收发器PCA82C50,它为CAN控制器和总线接口,它控制从CAN控制器到总线物理层或相反的逻辑电平信号,提供对总线的差动发送和对CAN控制器的差动接收功能。
光耦6N137起隔离作用。
图2 SJA1000的结构图所有这些CAN模块都由微处理器控制,它负责执行应用的功能,负责控制执行器(比如加热设备)、读传感器(比如温度)和处理人机接口。
如图2是SJA1000的应用结构图。
在CAN规范里,CAN核心模块控制CAN帧的发送和接收。
接口管理逻辑负责连接外部微处理器,该控制器可以是单片机、DSP或其他器件。
经过SJA1000复用的地址/数据总线访问寄存器和控制读写选通信号。
SJA1000的发送缓冲器能够存储一个完整的报文(扩展的或标准的)。
当微处理器初始化发送接口管理逻辑,CAN核心模块就会从发送缓冲器读CAN报文。
基于单片机的智能传感器CAN总线接口硬件设计随着智能化技术的不断发展,人们越来越关注智能系统的搭建,传感器技术的应用也越来越广泛,单片机技术更是在这个背景下广受关注。
在实现智能传感器的联网和信息处理方面,CAN总线作为一种主要网络协议,已经被广泛应用。
在这种情况下,智能传感器必须具有相应的CAN总线接口设计。
本文将介绍基于单片机的智能传感器CAN总线接口硬件设计。
1、 CAN总线介绍CAN(Controller Area Network)总线是一种串行通信协议,主要用于多个控制节点之间的实时数据传输。
CAN总线的通讯速度高,误码率低,具有自适应性等特点。
CAN总线的应用包括工业控制系统、汽车电子控制系统等。
2、硬件设计原理基于单片机的智能传感器CAN总线接口硬件设计需要根据自己的实际需求进行选择。
以STM32单片机为例,STM32单片机的CAN总线接口包括CAN1和CAN2,这两个接口在硬件电路上都有Rx和Tx引脚和节点电阻。
3、硬件设计流程(1)选择STM32单片机在选取单片机的时候,需要根据实际应用场景来选择。
STM32单片机有许多系列,每个系列又有不同的型号,不同型号的单片机内置了不同的外设,需要根据实际需求进行选择。
同时,要根据芯片性价比、性能、功耗等因素进行考虑。
(2)CAN总线选择在硬件设计中,需要选择CAN总线芯片,这个芯片需要支持CAN2.0A和CAN2.0B协议,并且需要支持高速通讯。
同时,要注意芯片的封装和额定工作温度等特性。
(3) CAN总线硬件连接在硬件连接中,需要将CAN总线芯片的Rx和Tx引脚和单片机的CAN1或CAN2接口相连,同时还需添加适当的电流限制电阻和终端电阻。
(4) CAN总线软件调试最后,需要对硬件电路进行软件调试,包括使用标准的CAN总线协议进行通信、CAN总线的数据传输、接收和发送数据、调试CAN中断等。
4、总结基于单片机的智能传感器CAN总线接口硬件设计需要根据实际需求进行选择,在硬件设计中需要选择合适的单片机、CAN总线芯片,并进行正确的硬件连接。
CAN总线系列讲座第五讲——CAN总线硬件电路设计一实战学习背景CAN总线节点的硬件构成方案有两种,其中的方案:(1)、MCU控制器+独立CAN控制器+CAN收发器。
独立CAN控制器如SJA10000、MCP2515,其中MCP2515通过SPI总线和MCU连接,SJA1000通过数据总线和MCU连接。
该方案编写的CAN程序是针对独立CAN控制器的,程序可移植性好,编写好的程序可以方便的移植到任意的MCU。
但是,由于采用了独立的CAN控制器,占用了MCU的I/O资源,并且电路变得复杂。
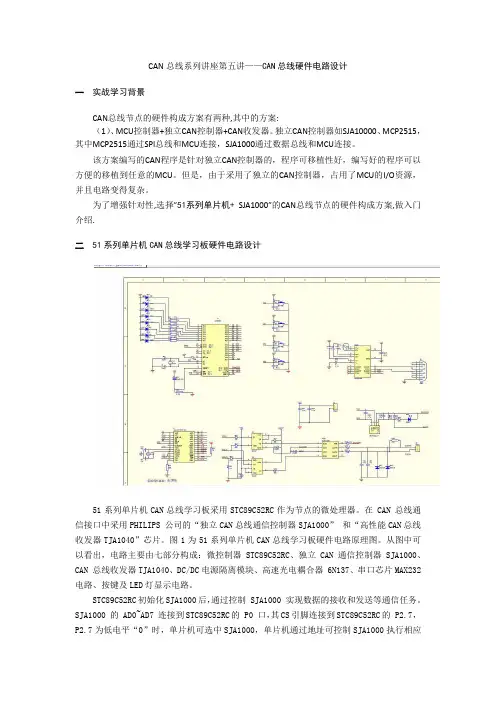
为了增强针对性,选择”51系列单片机+SJA1000”的CAN总线节点的硬件构成方案,做入门介绍.二51系列单片机CAN总线学习板硬件电路设计51系列单片机CAN总线学习板采用STC89C52RC作为节点的微处理器。
在 CAN 总线通信接口中采用PHILIPS 公司的“独立CAN总线通信控制器SJA1000”和“高性能CAN总线收发器TJA1040”芯片。
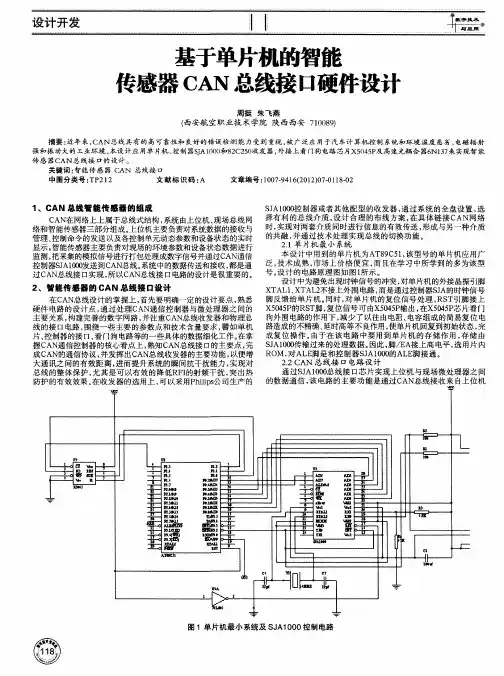
图1为51系列单片机CAN总线学习板硬件电路原理图。
从图中可以看出,电路主要由七部分构成:微控制器STC89C52RC、独立 CAN 通信控制器 SJA1000、CAN 总线收发器TJA1040、DC/DC电源隔离模块、高速光电耦合器 6N137、串口芯片MAX232电路、按键及LED灯显示电路。
STC89C52RC初始化SJA1000后,通过控制 SJA1000 实现数据的接收和发送等通信任务。
SJA1000 的 AD0~AD7 连接到STC89C52RC的 P0 口,其CS引脚连接到STC89C52RC的 P2.7,P2.7为低电平“0”时,单片机可选中SJA1000,单片机通过地址可控制SJA1000执行相应的读写操作。
SJA1000 的 RD、 WR、 ALE 分别与STC89C52RC的对应引脚相连。
SJA1000 的INT引脚接STC89C52RC的 INT0,STC89C52RC可通过中断方式访问SJA1000。
基于CAN总线的车载智能终端硬件设计随着智能汽车技术的不断发展,车载智能终端在汽车中的应用越来越广泛。
CAN总线作为车载通信网络的核心,是车载智能终端必不可少的硬件设计之一、本文将介绍基于CAN总线的车载智能终端硬件设计。
1.硬件架构设计车载智能终端硬件设计的基本架构包括主控制单元、CAN总线模块、外围接口模块和电源管理模块。
主控制单元通常选择高性能的ARM处理器,具有丰富的外设接口和强大的计算能力。
主控制单元负责处理各种传感器数据和外部通信,控制车载智能终端的各项功能。
CAN总线模块是连接主控制单元与车载CAN总线网络的桥梁,负责CAN总线数据的收发和解析。
CAN总线模块通常由CAN控制器和CAN收发器组成,能够实现高速稳定的数据传输。
外围接口模块包括各种传感器接口、视频输入输出接口、音频输入输出接口等,可以实现车载智能终端与外部设备的连接和数据传输。
电源管理模块负责为车载智能终端提供稳定的电源输入和管理电源开关,确保车载智能终端的正常工作。
2.硬件设计要点在设计基于CAN总线的车载智能终端硬件时,需要考虑以下要点:(1)稳定性与可靠性:在车载环境下,硬件设备需要经受严格的振动、温度、湿度等不利条件,因此硬件设计必须具有出色的稳定性和可靠性。
(2)电源管理:车载智能终端需要长时间工作,因此电源管理模块的设计至关重要,要能有效管理电源供应,确保终端的稳定工作。
(3)通信接口:CAN总线是车载通信网络的核心,因此CAN总线模块的设计必须考虑数据传输速度、稳定性、抗干扰能力等因素,确保数据的可靠传输。
(4)外围接口设计:要考虑到车载智能终端需要与多种外部设备进行连接和数据交换,因此外围接口模块的设计要充分满足各种接口需求。
3.硬件设计实例一种基于CAN总线的车载智能终端硬件设计实例如下:主控制单元采用Cortex-A53架构的ARM处理器,集成CAN控制器;CAN总线模块采用高速CAN收发器,支持CAN2.0B协议;外围接口模块包括数字摄像头接口、USB接口、HDMI接口等;电源管理模块采用高效稳定的DC-DC变换器,支持宽电压输入。
基于CAN总线的多路温度采集系统的设计学生姓名:朱广东指导教师:黄震梁浙江树人大学信息科技学院电子信息工程114班摘要以嵌入式处理器为核心,总结CAN总线通信技术,设计一套由一个主机,两个从机组成了温度采集的系统,两个从机使用Pt100温度传感器来采集各自部分的温度值,通过CAN 总线将两个从机的温度数据传输给主机,主机接收到从机数据,并将各个从机的温度值显示在LCD液晶屏上。
关键词:温度采集;ARM7;CAN总线;1引言1.1CAN总线研究背景与意义在现代化的工业生产中,温度是极为普遍又极为重要的热工参数之一。
例如:在冶金工业、化工生产、电力工程、造纸行业、机械制造和食品加工等诸多领域中,人们都需要对各类加热炉、热处理炉、反应炉和锅炉中的温度进行检测和控制。
温度控制不好就可能引起生产安全,产品质量和产量等一系列问题。
尽管温度控制很重要,但是要控制好温度常常会遇到意想不到的困难.采用CAN总线对温度迸行控制,不仅具有控制方便、组态简单和灵活性大等优点,而且可以大幅度提高被控温度的技术指标,从而能够大大提高产品的质量和数量。
控制器局部网(CAN—CONTROLLER AREA NETWORK)是BOSCH公司为现代汽车应用领先推出的一种多主机局部网,由于其卓越性能,现己广泛应用于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等众多部门。
CAN总线从形成并应用于汽车工业至今,其突出的特点和优异的性能使它的应用范围不断的扩大。
目前在机械工业、纺织工业、机器人、医疗器械、传感器、智能小区管理和家用电器等领域都得到了应用和发展。
而且CAN也是目前为止唯一具有国际标准的现场总线,因此CAN具有广阔的前景。
CAN总线与一般的通信总线相比,它的数据通信具有突出的可靠性、实时性和灵活性。
概括起来有下列一些突出的特点:1.CAN总线为多主工作方式,网络上任一节点均可在任意时刻主动地向网络上其它节点发送信息,而不是传统的主从方式。
CAN总线接口电路的硬件设计首先,CAN总线接口电路的设计需要考虑以下几个方面:电气特性、线路传输、保护电路以及电源设计。
1. 电气特性设计:CAN总线通信的电气特性主要包括传输速率、传输距离和传输噪声等。
根据CAN总线的规范,通信速率可分为几个常用的速率,如1Mbps、500Kbps、250Kbps等。
在设计CAN总线接口电路时,需要选择与所应用的CAN总线通信速率相匹配的晶振,并根据晶振选择合适的分频比。
此外,CAN总线的传输距离较短,一般在40米以内,因此需要考虑信号的传输衰减和时序的稳定性。
传输噪声是CAN总线设计中的一个重要问题,为了减少噪声的干扰,可以采取屏蔽线路、独立地线、滤波电路等措施。
2.线路传输设计:CAN总线的传输线路一般是双绞线,这种线路能够减少电磁干扰,提高传输质量。
在设计CAN总线接口电路时,需要合理布局CAN总线线路,确保信号的稳定传输。
在布线过程中,需要避免与其他高干扰信号线路的交叉和并行,以减少电磁干扰的可能性。
对于长距离传输的CAN总线,还需要考虑电缆的衰减和传输质量,可以通过使用中继器来增强信号。
3.保护电路设计:CAN总线接口电路需要设计合适的保护电路,以防止过压、过流、过热等故障对电路和设备的损坏。
常见的保护电路有瞬态电压抑制器(TVS)、过流保护电路和热敏电阻等。
瞬态电压抑制器可以抑制大功率瞬态电流,保护电路免受过压的影响;过流保护电路可监测和控制电流变化,确保电路不会因过大的电流而损坏;热敏电阻可用于监测电路的温度,并在温度超过预设值时触发保护机制。
4.电源设计:CAN总线接口电路的电源设计需要考虑电源稳定性和滤波。
稳定的电源可以提供稳定的工作环境,减少因电源波动而产生的故障。
滤波电路可以滤除电源中的噪声,提高电源的质量。
通常情况下,CAN总线接口电路需要提供3.3V或5V的电源供电,可以使用稳压器或开关电源等方式得到所需的电源电压。
总之,CAN总线接口电路的硬件设计需要考虑电气特性、线路传输、保护电路以及电源设计等方面的问题。
can总线电路设计摘要:1.CAN 总线电路设计概述2.CAN 总线电路的组成部分3.CAN 总线电路的设计流程4.CAN 总线电路的常见问题及解决方法5.总结正文:一、CAN 总线电路设计概述CAN 总线(Controller Area Network)是一种常用于车辆和工业控制领域的通信协议,其主要特点是多主控制器、高可靠性、实时性、高抗干扰能力和低成本。
CAN 总线电路设计是指在硬件层面实现CAN 总线通信的过程,主要包括CAN 控制器、CAN 总线驱动器、CAN 总线收发器等组成部分。
二、CAN 总线电路的组成部分1.CAN 控制器:CAN 控制器是CAN 总线电路的核心部分,负责处理CAN 总线通信的逻辑和数据传输。
常见的CAN 控制器有Microchip 的MCP2510、STMicroelectronics 的STM32 等。
2.CAN 总线驱动器:CAN 总线驱动器负责将CAN 控制器输出的信号转换为适合在总线上传输的信号,同时也能将总线上的信号转换为CAN 控制器能识别的信号。
常见的CAN 总线驱动器有TJA1020、MCP2003 等。
3.CAN 总线收发器:CAN 总线收发器负责处理CAN 总线上的物理层通信,包括信号的放大、整形、滤波等功能。
常见的CAN 总线收发器有MCP2020、TJA1021 等。
三、CAN 总线电路的设计流程1.确定设计需求:根据实际应用需求,确定CAN 总线通信的节点数量、通信速率、传输距离等参数。
2.选择合适的CAN 控制器、驱动器和收发器:根据设计需求,选择性能、接口、封装等满足需求的CAN 控制器、驱动器和收发器。
3.电路设计:设计CAN 总线电路的电源、时钟、接地等部分,同时根据CAN 控制器、驱动器和收发器的接口,设计相应的连接线路。
4.程序设计:编写CAN 总线通信的软件程序,包括初始化CAN 控制器、发送和接收数据、错误检测和处理等功能。
can总线硬件电路设计English:Designing hardware circuits for a CAN bus involves various considerations to ensure reliable and efficient communication between nodes. The first step is to select appropriate transceivers that can handle the electrical characteristics of the CAN bus such as voltage levels, signal rates, and noise immunity. Transceivers with integrated protection features such as thermal shutdown and overvoltage protection are typically preferred. The next step is to design the physical layer, which includes termination resistors to prevent signal reflections and bias resistors to ensure proper bus line levels when nodes are idle. Impedance matching should also be considered to minimize signal reflections. It is important to follow the CAN protocol specifications when designing the hardware circuit, including the bit time calculation, frame format, and error handling mechanisms. The clock frequency for the CAN controller should be selected based on the required bit time and the desired bandwidth. Power supply filtering and decoupling capacitors are necessary to provide clean and stable voltage to the transceiver and controller.Additionally, protection circuits such as ESD (electrostatic discharge) diodes should be incorporated to safeguard the circuit from electrostatic discharge events. Grounding techniques, such as star or point-to-point grounding, should be employed to minimize ground loops and ensure signal integrity. Finally, thorough testing and validation of the hardware circuit should be conducted to ensure its compatibility with the CAN protocol and its ability to handle various operating conditions and load situations.中文翻译:设计CAN总线的硬件电路涉及各种考虑因素,以确保节点之间的可靠和高效通信。
CAN总线接口电路的硬件设计CAN总线(Controller Area Network)是一种广泛应用于汽车和工业控制等领域的串行通信协议,它提供可靠的数据传输和实时性能。
CAN总线接口电路的硬件设计是实现CAN总线通信的关键部分,本文将围绕CAN总线接口电路的硬件设计进行详细阐述。
首先,CAN总线接口电路的硬件设计需要考虑以下几个关键因素:1.CAN控制器选择:CAN总线传输采用分为CAN2.0A和CAN2.0B两种标准,CAN控制器根据标准来支持相应的功能,硬件设计时需要根据产品需求选择合适的控制器。
2.电气特性:CAN总线是差分信号传输,其电气特性决定了CAN总线的抗干扰能力和传输距离。
硬件设计中需要考虑CAN总线的终端电阻、抑制电磁辐射等电气特性,以确保有效的信号传输。
3.数据保护:CAN总线通信中存在数据传输错误、冲突等问题,硬件设计中需要采用适当的数据校验机制和错误检测机制,确保数据的可靠性。
具体的硬件设计步骤如下:1.确定CAN控制器:根据产品需求选择合适的CAN控制器,CAN控制器一般包括CAN报文的发送和接收功能。
2.电气特性设计:根据CAN总线标准,确定电气特性要求,包括总线电压、终端电阻等。
根据总线长度和负载情况,确定总线的终端电阻值,并将终端电阻接入CAN总线。
3.电源供电设计:CAN总线需要有稳定的电源供电,保证CAN控制器和总线稳定工作。
为CAN控制器提供适当的电源电压和电流,并采取合适的滤波电路来消除电源的噪声干扰。
4.数据保护设计:通过添加合适的校验机制和错误检测机制,保障数据的可靠性。
常见的校验机制包括CRC(循环冗余校验码),错误检测机制包括奇偶校验、位填充、差错定位等。
5.引脚分配设计:根据所选用的CAN控制器的引脚定义,进行引脚分配设计。
将CAN控制器与总线连接,并与其他相关器件进行连接,如处理器、外围设备等。
6.布线设计:合理的布线设计能够减少电磁干扰,提高信号传输的稳定性。
EDN-CAN总线助学【之八】-CAN总线硬件设计
这一讲我们详细介绍一下CAN总线通讯模块的硬件设计:CAN总线学习板上C AN通讯模块的设计。
包括三个部分:(1)与CPU的接口;(2)CAN控制器SJA1000与驱动器82C250接口及其他外围电路;(3)82C250外围电路。
电路如下:
1 SJA1000与CPU接口
我们在学习单片机原理的时候,我相信大家都学习过RAM,ROM,I/O口扩展。
大家可以把SJA1000看作一个外部的RAM,扩展电路十分简单。
SJA1000支持两种模式单片机的连接,我们选用的是8051系列的单片机,所以选择的是I ntel模式。
(1)SJA1000的数据线和地址线是共用的,STC89C52的数据线和地址线也是共用的,这就更加方便了,直接连接就OK了。
(2)既然数据线和地址线共用,必须区分某一时刻,AD线上传输的是地址还是数据,所以就需要连接地址锁存信号 ALE。
(3)随便使用一个单片机管脚作为SJA1000的片选信号,我们学习板使用的是P20。
当然你也可以直接接地。
(4)读写信号直接和单片机连接就行了,就不必多说了!
(5)我们采用单片机的IO口线控制SJA1000的RST管脚,是为了软件可以实现硬复位SJA1000芯片。
(6)SJA1000的中断管脚连接单片机的INT1外部中断。
当收到一包数据后,通知CPU。
2 SJA1000与82C250的接口及其他外围电路
(1)SJA1000有两路发送和接收管脚,CAN总线学习板使用了第0路。
与82 C250的连接比较简单,直接连接就可以了。
但应该数据发送和接收管脚不要接反了。
而且我们增加了通讯状态指示灯,便于调试。
(2)时钟电路:SJA1000的最高时钟可达24M,我们学习板使用的是16M的晶振。
另外增加了一个启动电阻R9(10M欧姆)。
(3)
3 82C250外围电路
(1)CANH和CANL管脚增加阻容电路,滤除总线上的干扰,提高系统稳定性。
(2)RS管脚为斜率电阻输入。
通过这个管脚来选择82C250的工作模式:高速模式(应用与对数据传输速率高的情况,通讯数据线最好是屏蔽的);斜率模式(速度较低,通讯线可以是普通的双绞线)。
准备模式(应用于对功耗要求比较高的场合)。
我们的学习板采用的是斜率模式,方便大家学习。
(3)J3是外部总线的连接口。
(4)J4是终端电阻的选择端。
到现在为止,CAN总线学习的硬件部分就介绍完了,请等待下面的软件试验部分!。