基于CAN总线的设计
- 格式:ppt
- 大小:78.50 KB
- 文档页数:55

引言锅炉是通过燃烧加热工质来提供热能动力的重要设备,同时又是承压、受火、有爆炸危险而又被各行各业普遍使用的特殊设备。
所以实时监控锅炉的运行状态,及时、准确地发现锅炉运行中的事故至关重要。
传统的锅炉监控系统在测量手段和使用的传感器方面都存在很大的缺陷。
以温度检测为例,早期采用的热电偶电桥法,测试过程复杂;而采用集成的半导体模拟温度传感器需要大量的传输电缆,成本高且不易维护。
CAN总线是一种多主机控制标准,具有物理层和数据链路层的协议、多主节点、无损仲裁、高可靠性及扩充性能好等特点;能有效支持分布式控制系统的串行通信网络。
一方面,其通信方式灵活,可实现多主方式工作,还可实现点对点、点对多点等多种数据的收发;另一方面,能在相对较大的距离间进行较高位速率的数据通信。
本系统是由上位机对多个并列的承压锅炉监控单元进行控制管理,各监控单元之间要进行快速的数据传输。
CAN总线能很好地满足该系统的要求。
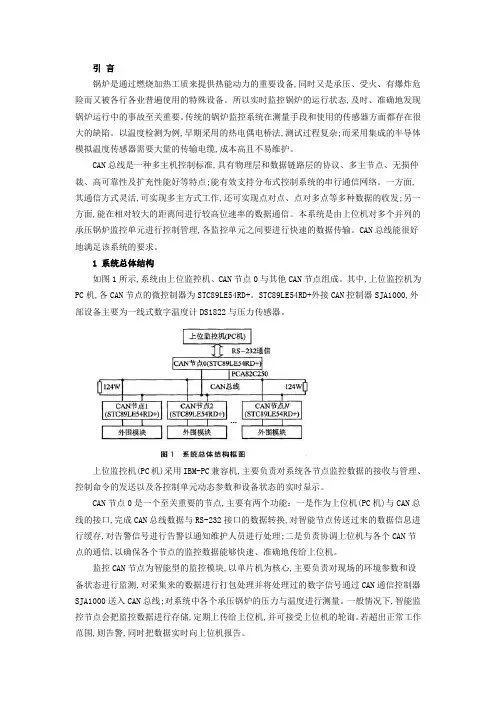
1 系统总体结构如图1所示,系统由上位监控机、CAN节点0与其他CAN节点组成。
其中,上位监控机为PC机,各CAN节点的微控制器为STC89LE54RD+。
STC89LE54RD+外接CAN控制器SJA1000,外部设备主要为一线式数字温度计DS1822与压力传感器。
上位监控机(PC机)采用IBM-PC兼容机,主要负责对系统各节点监控数据的接收与管理、控制命令的发送以及各控制单元动态参数和设备状态的实时显示。
CAN节点0是一个至关重要的节点,主要有两个功能:一是作为上位机(PC机)与CAN总线的接口,完成CAN总线数据与RS-232接口的数据转换,对智能节点传送过来的数据信息进行缓存,对告警信号进行告警以通知维护人员进行处理;二是负责协调上位机与各个CAN节点的通信,以确保各个节点的监控数据能够快速、准确地传给上位机。
监控CAN节点为智能型的监控模块,以单片机为核心,主要负责对现场的环境参数和设备状态进行监测,对采集来的数据进行打包处理并将处理过的数字信号通过CAN通信控制器SJA1000送入CAN总线;对系统中各个承压锅炉的压力与温度进行测量。
基于CAN总线的汽车电子信息系统设计随着科技的不断进步和人们对汽车功能需求的不断增加,汽车电子信息系统变得越来越复杂。
作为现代汽车的核心,基于CAN 总线的汽车电子信息系统设计尤为重要。
本文将介绍基于CAN总线的汽车电子信息系统设计的相关知识和实施步骤。
一、概述CAN(Controller Area Network)总线是一种广泛应用于汽车领域的串行通信协议。
它允许多个微控制器互相通信,并可以操作和监控汽车中的各种电子器件。
基于CAN总线的汽车电子信息系统设计的目标是实现各个子系统之间的高效通信和数据交换,从而提供更好的驾驶体验和车辆性能。
二、系统架构设计基于CAN总线的汽车电子信息系统设计通常包括以下几个子系统:动力系统、安全系统、车辆网络系统和驾驶辅助系统。
系统架构设计的目标是使各个子系统之间实现有效的通信和协调工作。
1. 动力系统动力系统是汽车的核心,主要包括引擎、变速器和传动轴等部件。
在基于CAN总线的汽车电子信息系统设计中,动力系统需要与其他子系统进行信息传递和协调工作,以确保汽车的正常运行和性能优化。
2. 安全系统安全系统是为了保障驾驶员和乘客的安全而设计的。
基于CAN 总线的汽车电子信息系统设计中,安全系统包括制动系统、安全气囊系统和稳定控制系统等。
这些系统需要实时地与其他子系统进行数据交换和信息共享,以确保汽车的安全性能。
3. 车辆网络系统车辆网络系统主要用于实现汽车的各种功能,如娱乐系统、导航系统和网络连接等。
在基于CAN总线的汽车电子信息系统设计中,车辆网络系统需要与其他子系统进行数据交换和通信,以实现全面的车辆功能。
4. 驾驶辅助系统驾驶辅助系统是为了提供更好的驾驶体验和驾驶安全而设计的。
基于CAN总线的汽车电子信息系统设计中,驾驶辅助系统包括自动巡航控制系统、驻车辅助系统和车道保持系统等。
这些系统需要与其他子系统实时地交换数据和信息,以提供准确的驾驶辅助功能。
三、实施步骤基于CAN总线的汽车电子信息系统设计的实施步骤如下:1. 系统需求分析首先,进行系统需求分析,明确系统的功能和性能需求。
课程设计(论文)任务及评语院(系):电气工程学院 教研室:自动化 注:成绩:平时20% 论文质量60% 答辩20% 以百分制计算 学 号070302145 学生姓名 李娜 专业班级 自动化075 课程设计题目 基于CAN 总线的主从机通信系统设计课程设计(论文)任务 课题完成的功能、设计任务及要求、技术参数实现功能以CAN 总线为基础,设计主从机间通信,硬件上完成单片机最小系统、总线控制器、驱动器、串口通信等电路的设计,软件上完成主机、从机和CAN 总线的收发数据。
设计任务及要求1、选择总线控制器、单片机型号,确定设计方案;2、设计单片机最小系统(晶振、电源、复位等);3、设计实现系统功能的单片机外围电路;4、设计CAN 总线电路(包括控制器、驱动器、接口电路);5、软件设计(编写主程序、接收、发送程序及相应的流程图)6、要求认真独立完成所规定的全部内容;所设计的内容要求正确、合理。
7、撰写、打印设计说明书一份;设计说明书应在4000字以上。
技术参数1、符合CAN2.0B 规范;2、CAN 节点参数:晶振频率为24MHz,,总线的速度为20kb/s ,最大的传输距离为3000m ,双滤波接收数据。
进度计划 1、布置任务,熟悉课设题目,查找及收集相关书籍、资料。
(1天)2、确定控制方案、选型。
(2天)3、总线电路硬件设计。
(3天)4、程序实现及流程图。
(2天)5、撰写设计说明书。
(1天)6、验收及答辩。
(1天)指导教师评语及成绩平时: 论文质量: 答辩:总成绩: 指导教师签字:年 月 日摘要现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。
它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
CAN(Controller Area Network)属于现场总线的范畴,是一种多主方式的串行通讯总线,数据通信实时性强。
与其它现场总线比较而言,CAN总线具有通信速率高、容易实现、可靠性高、性价比高等诸多特点。
基于CAN总线信号采集系统电路设计随着汽车工业的进步,CAN总线系统逐渐成为汽车电气通讯领域的主流传输技术。
CAN总线采集系统是目前汽车电气采集数据的基础,它可以采集引擎、变速器、ABS、空调、电子油门等多种设备的信号并实时传输到控制器,从而实现车辆状态的监测和控制。
本文将详细探讨基于CAN总线信号采集系统电路设计。
一、系统设计方案系统的设计方案,包括了CAN芯片的选择、系统的拓扑结构、信号输入方式、信号处理与转化、输出方式等等。
根据实际需求,系统主要分为以下两个部分:(1)CAN节点部分CAN节点部分是CAN信号采集系统的核心部分,主要由MCU单片机和CAN收发器构成。
MCU单片机是实现系统的控制和数据处理,它接收各个传感器的模拟量信号,并将其转换成数字量信号,再将其打包成CAN帧输出给CAN总线。
而CAN收发器则是实现在CAN总线上的数据传输,它主要负责对CAN总线上的信号进行收发。
CAN节点部分的实现过程主要包括以下五个步骤:Step 1. 选定MCU并搭建系统选定一款MCU芯片,例如STC12C5A60S2,搭建工程并进行配置。
在搭建过程中,需要注意向MCU传输指令的方式,最常用的方式是串口传输。
Step 2. 选择CAN收发器并接入CAN总线在本系统中,我们选择了二代高速CAN收发器MCP2515,它可以实现在高速的CAN总线中进行数据传输。
将CAN收发器与MCU单片机进行连接,然后接入CAN总线。
Step 3. 建立CAN节点的通信协议在CAN节点与CAN总线建立通信协议之前,我们要先了解CAN的工作机制。
CAN总线实际上是一条双向通路,任意一个节点都可以接收和发送数据。
每个节点都有自己的地址码,通过地址码来定位数据的发送和接收。
因此,在CAN节点与CAN总线建立通信协议时,需要确定每个节点的地址码以及数据包的格式。
Step 4. 采集模拟量信号在CAN节点部分,MCU单片机需要采集各个传感器的模拟量信号,并将其转换成数字信号,再将其打包成CAN帧输出给CAN总线。