伺服电机计算学习资料
- 格式:doc
- 大小:22.50 KB
- 文档页数:4
伺服电机选型计算
1.负载惯量计算
负载惯量是指负载的转动惯量,计算方式为质量乘以质心距离平方。
负载惯性大会对电机的加速度和精度要求产生一定的影响。
伺服电机需要
具备足够的能力来加速和控制负载。
负载惯量的计算公式为:
J=m*r^2
其中,J表示负载的转动惯量,m表示负载的质量,r表示负载的质
心距离。
根据实际情况确定负载的质量和质心距离,可以估算负载的转动惯量。
2.加速度计算
加速度是指负载达到一定速度所需的时间。
加速度较大可以提高生产
效率,但可能会引起震动和噪音。
确定合适的加速度需要根据应用需要进
行权衡。
加速度的计算公式为:
a=(ωf-ωi)/t
其中,a表示加速度,ωf表示最终速度,ωi表示初始速度,t表示
加速时间。
3.扭矩计算
扭矩是伺服电机提供的力矩,其大小决定了电机的最大负载能力。
根据应用需求可以计算出负载所需的最大扭矩。
扭矩的计算公式为:
T=J*α
其中,T表示所需的最大扭矩,J表示负载的转动惯量,α表示加速度。
4.功率计算
功率是指电机输出的机械功率,也是伺服电机选型的一个重要参数。
根据应用需求可以计算出对应负载的最大功率。
功率的计算公式为:
P=M*ω
其中,P表示功率,M表示扭矩,ω表示角速度。
5.速度计算
速度是指电机的转速,根据应用需求可以计算出所需的最大速度。
速度的计算公式为:
V=ω*r
其中,V表示速度,ω表示角速度,r表示负载的质心距离。

伺服电机计算完整版伺服电机是一种可以实现高精度运动控制的电机。
它采用了闭环控制系统,通过反馈信号不断调整输出,以实现对位置、速度和加速度的精确控制。
伺服电机在自动化控制、工业机械、机器人等领域有着广泛的应用。
伺服电机的运动控制可以通过数学模型来描述。
一般情况下,可以将伺服电机的运动控制建模为一个二阶系统。
在建立数学模型之前,需要了解一些关键参数,包括电机的转矩常数Kt、电机的动态阻尼比ζ、滤波器的角频率ωn以及PID控制器的增益参数Kp、Ki和Kd。
伺服电机的数学模型可以用以下差分方程来描述:Tm*(θm(k+1)-θm(k))/T=Kt*(Ti/R)*Vi(k)-Td*(θm(k)-θ(k))J*(θ(k+1)-2θm(k)+θ(k-1))/T^2=T*(θm(k+1)-θm(k))/T其中,Tm为电机的转矩,θm(k)为电机的角度,Vi(k)为控制输入,Ti和R分别为电机的转矩常数和电阻,Td为电机的动态阻尼比,J为负载的转动惯量,θ(k)为负载的角度,T为采样周期。
根据以上差分方程,可以推导得到伺服电机的传递函数:G(s)=(Kt*(Ti/R))/(J*s^2+(Td+J)*s+(Kt*(Ti/R)))可以根据传递函数来设计伺服电机的控制器。
一种常见的控制器设计方法是PID控制,它是通过对误差进行比例、积分和微分处理来调整输出。
PID控制器的输出可以表示为:U(s)=Kp*e(s)+Ki*1/s*e(s)+Kd*s*e(s)其中,U(s)为控制器的输出,Kp、Ki和Kd分别为比例、积分和微分增益参数,e(s)为误差信号,s为Laplace变换中的频率变量。
通过将传递函数和控制器的输出进行连接,可以得到整个系统的传递函数:T(s)=G(s)*U(s)=(Kt*(Ti/R))/(J*s^2+(Td+J)*s+(Kt*(Ti/R)))*(Kp*e(s)+Ki*1/s*e(s)+Kd*s*e(s))根据传递函数T(s),可以进行系统的频域和时域分析,以评估系统的稳定性和动态性能。
伺服电机转速与脉冲计算公式伺服电机是一种根据输入的控制信号来精确控制转速和位置的电机。
它通常由电机、减速器、编码器和控制器组成。
其中,编码器是伺服电机的旋转角度和速度的反馈装置,用来向控制器提供反馈信号,以实现精确的控制。
伺服电机的转速通常是以脉冲方式进行控制。
控制器向编码器发送一定数量的脉冲信号,编码器通过计数脉冲的数量来确定电机的转速。
下面将介绍伺服电机转速与脉冲的计算公式。
1.伺服电机转速的计算公式伺服电机的转速可以用以下的公式来计算:转速=(脉冲频率*60)/(编码器分辨率*编码器线数*减速比)其中:-转速是以转/分钟为单位的;-脉冲频率是控制器发送的脉冲信号频率,以赫兹(Hz)为单位;-编码器分辨率是编码器每一圈的脉冲数;-编码器线数是编码器每一圈的引线数;-减速比是电机的减速比。
伺服电机的脉冲计算公式可以根据电机的转速和编码器的分辨率来确定。
通常,每一圈的脉冲数和编码器的分辨率是成正比的关系。
伺服电机的脉冲数可以用以下的公式来计算:脉冲数=(转速*编码器分辨率*编码器线数*减速比)/60其中:-脉冲数是控制器发送的脉冲信号数量;-转速是电机每分钟的转速;-编码器分辨率是编码器每一圈的脉冲数;-编码器线数是编码器每一圈的引线数;-减速比是电机的减速比。
需要注意的是,以上的计算公式是基于理想情况下的伺服电机转速和脉冲之间的关系。
实际应用中,还需要考虑编码器的误差、电机的自身特性等因素,进行实时的修正和调整,以保证精准的转速控制。
总结起来,伺服电机转速与脉冲计算公式是根据电机的工作原理和编码器的特性来确定的。
了解伺服电机的转速和脉冲之间的关系,可以帮助我们在实际应用中更好地控制和调节伺服电机的转速。
伺服电机选型计算引言伺服电机是一种能够精确控制转速、位置和加速度的电机,广泛应用于工业自动化领域。
为了正确选型伺服电机,需要综合考虑多个因素,如负载特性、所需转动速度、加速度和减速度等。
本文将介绍伺服电机的选型计算方法。
1. 伺服电机基本参数在选型计算之前,首先需要了解伺服电机的基本参数,这些参数对于计算非常重要。
常见的基本参数包括:•额定转矩:伺服电机能够连续输出的最大转矩。
•额定转速:伺服电机在额定负载下能够达到的最高转速。
•道数:伺服电机的反馈器件信号周期数量,通常是脉冲或电压。
•分辨率:伺服电机的转子位置检测精度,通常以脉冲数表示。
2. 负载特性分析选型伺服电机的第一步是分析负载特性。
负载特性包括负载转矩和转动惯量。
可以通过以下公式计算负载转矩:负载转矩 = 工作负载 × 工作半径其中,工作负载是指应用中所需的转矩,工作半径是转轴到工作力点的距离。
转动惯量是指负载物体抵抗转动的惯性,可以通过以下公式计算:转动惯量 = 负载质量 × 负载半径²负载质量是指负载物体的质量,负载半径是转轴到负载质心的距离。
3. 加速度计算在伺服电机选型中,需要考虑加速度和减速度,以确保电机能够在规定的时间内达到所需速度。
加速度的计算公式如下:加速度 = (目标速度 - 初始速度) / 时间其中,目标速度是所需达到的最终速度,初始速度是实际启动时的初始速度。
4. 选型计算有了上述参数和计算公式,可以开始具体的选型计算。
选型计算主要包括以下步骤:1.确定工作负载和工作半径。
2.计算负载转矩和转动惯量。
3.确定加速度和减速度的要求。
4.根据负载转矩和转动惯量,选择能够满足要求的伺服电机。
5.检查是否满足速度要求,如果不满足,可以考虑调整加速度和减速度参数。
在具体计算中,还需要考虑一些额外因素,如安全系数、附加负载等。
结论伺服电机选型计算是一项重要且复杂的任务,需要综合考虑多个因素。
通过合理的选型计算,可以确保伺服电机能够满足工作需求,并提供稳定和可靠的运行。
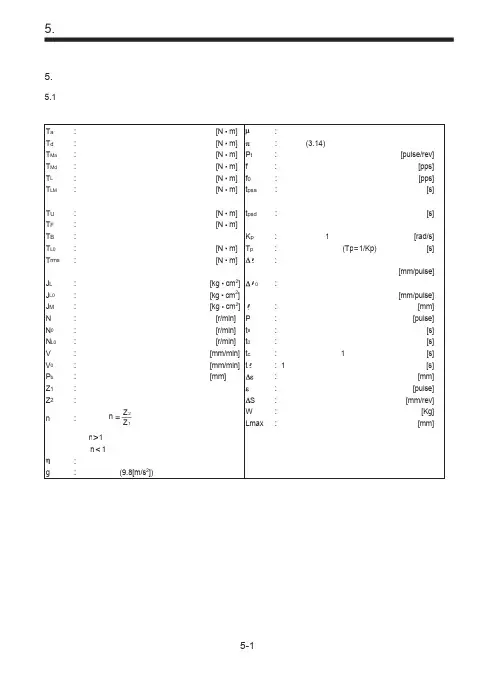
负载质量M(kg5·滚珠丝杠节距P(mm10·滚珠丝杠直径D(mm20·滚珠丝杠质量MB(kg3·滚珠丝杠摩擦系数μ0.1·因无减速器,所以G=1、η=11②动作模式的决定速度(mm/s单一变化·负载移动速度V(mm/s300·行程L(mm360·行程时间tS(s 1.4·加减速时间tA(s0.2·定位精度AP(mm0.01③换算到电机轴负载惯量的计算滚珠丝杠的惯量JB= 1.50E-04kg.m2 负载的惯量JW= 1.63E-04kg.m2换算到电机轴负载惯量JL=JW J=G2x(J W+J2+J1 1.63E-04kg.m2L④负载转矩的计算对摩擦力的转矩Tw7.80E-03N.m换算到电机轴负载转矩TL=Tw7.80E-03N.m⑤旋转数的计算转数N N=60V/P.G1800r/min⑥电机的初步选定[选自OMNUC U系列的初步选定举例] 选定电机的转子·惯量为负载的JM≥J L/30 5.42E-06kg.m2 1/30*以上的电机选定电机的额定转矩×0.8TMx0.8>T L0.5096>比换算到电机轴负载转矩大的电机N.m* 此值因各系列而异,请加以注意。
⑦加减速转矩的计算加减速转矩TA0.165N.m⑧瞬时最大转矩、有效转矩的计算必要的瞬时最大转矩为T1T1=TA+TL0.1726N.mT2=TL0.0078N.mT3=TL-TA-0.1570N.m有效转矩Trms为0.095N.m⑨讨论负载惯量JL 1.63E-04kg.m2≦[电机的转子惯量JM有效转矩Trms0.095N.m﹤[电机的额定转矩瞬时最大转矩T10.1726N.m﹤[电机的瞬时最大转矩必要的最大转数N1800r/min≦[电机的额定转数编码器分辨率R=P.G/AP.S1000(脉冲/转U系列的编码器规格为204速度(mm/s3000.210.20.2时间(s初步选择定R88M-U20030(Jm= 1.23E-05 根据R88M-U20030的额定转矩Tm=(N.m≦[电机的转子惯量JM1.23E-05×[适用的惯量比=30]﹤[电机的额定转矩0.5096N.M7.8E-030.637﹤[电机的瞬时最大转矩 1.528 N.M ≦[电机的额定转数 3000 r/min U系列的编码器规格为2048(脉冲/转),经编码器分频比设定至1000(脉冲/转)的情况下使用。
伺服电机精度计算摘要:1.伺服电机概述2.伺服电机精度的定义和重要性3.伺服电机精度的计算方法4.影响伺服电机精度的因素5.提高伺服电机精度的措施正文:一、伺服电机概述伺服电机,又称为执行电机,是一种将电脉冲转换为角位移或线位移的电机。
它具有高精度、高速度、高扭矩和良好的低速性能等特点,广泛应用于各种定位、速度控制和精密传动等领域。
二、伺服电机精度的定义和重要性伺服电机精度是指电机在无负载情况下,其转子每转的脉冲数。
伺服电机精度是衡量伺服电机性能的重要指标,直接影响到伺服系统的定位精度和控制精度。
高精度的伺服电机可以提高伺服系统的稳定性和可靠性,满足各种高精度定位和控制的需求。
三、伺服电机精度的计算方法伺服电机精度的计算公式为:精度= 1 / (电机每转的脉冲数× 齿轮减速比)其中,电机每转的脉冲数是指电机每转一圈所需的电脉冲数;齿轮减速比是指电机的实际转速与电机驱动器输出的电信号频率之比。
四、影响伺服电机精度的因素1.电机本身的精度:电机的制造工艺和材料直接影响到电机的精度。
2.编码器:编码器是伺服电机精度检测的关键部件,其精度直接影响到伺服电机的精度。
3.控制系统:伺服系统的控制算法和参数设置也会对伺服电机的精度产生影响。
4.负载:伺服电机的负载情况会影响到电机的转速和扭矩,从而影响其精度。
五、提高伺服电机精度的措施1.选择高精度的电机和编码器:采用高精度的电机和编码器可以提高伺服电机的精度。
2.优化控制系统:通过调整控制参数和采用先进的控制算法,可以提高伺服电机的精度。
3.减轻负载:合理分配负载,降低伺服电机的负载,可以提高其精度。
4.提高安装和调试水平:正确的安装和调试可以确保伺服电机的精度。
综上所述,伺服电机精度的计算是一项重要的工作,需要综合考虑多种因素。
伺服电机选型设计计算一、引言伺服电机是一种能够进行位置、速度和力控制的电机,广泛应用于机械设备、自动化设备、机器人等领域。
在进行伺服电机选型设计时,需要考虑的参数包括负载惯量、所需转矩、速度要求等。
本文将以其中一种机械设备为例,介绍伺服电机选型设计的计算方法。
二、负载惯量计算负载惯量是指转动物体的重心与转动轴心之间的惯量,可以通过以下公式计算:J=m*r²其中,J为负载惯量,m为负载的质量,r为负载的半径。
在计算时需要考虑到实际系统中传动装置的参数。
三、转矩计算转矩是指伺服电机输出的力矩,可以通过以下公式计算:T=J*α其中,T为转矩,J为负载惯量,α为加速度。
在计算转矩时,需要根据具体应用的加速度要求进行确定。
四、最大转矩计算为了保证正常运行,伺服电机的转矩应大于或等于最大转矩,可以通过以下公式计算:T_max = T + F * r其中,T_max为最大转矩,T为转矩,F为负载的水平力,r为负载的半径。
五、速度计算速度是指伺服电机的转动速度,可以通过以下公式计算:ω=2*π*n/60其中,ω为速度,n为转速。
在计算速度时,需要根据具体应用的速度要求进行确定。
六、转动惯量计算转动惯量是指伺服电机本身的惯量,可以通过以下公式计算:J_m=m_m*r_m²+J_r其中,J_m为转动惯量,m_m为伺服电机本身的质量,r_m为伺服电机本身的半径,J_r为转动装置的惯量。
根据具体应用的转动装置进行确定。
七、功率计算功率是伺服电机输出的功率,可以通过以下公式计算:P=T*ω/1000其中,P为功率,T为转矩,ω为速度。
在计算功率时,需要考虑到实际应用中的效率,通常取效率值为0.8左右。
八、综合考虑在进行伺服电机选型设计时,需要综合考虑转矩、速度和功率等参数。
一般来说,转矩需大于或等于最大转矩,速度需大于或等于所需速度,功率需大于或等于所需功率。
同时,还需要考虑价格、体积和可靠性等因素。
伺服电机速度计算公式
理想情况下的速度计算公式:
在理想情况下,我们可以使用基本的物理公式来计算伺服电机的速度。
假设伺服电机的旋转惯量为J,电机所受的扭矩为T,则速度可以通过以
下公式计算:
ω=(T/J)*t
其中,ω表示电机的角速度,T表示电机所受的扭矩,J表示电机的
旋转惯量,t表示时间。
实际情况下考虑摩擦和负载的速度计算公式:
在实际情况下,我们需要考虑到伺服电机所受的摩擦和负载。
假设伺
服电机受到摩擦力 Ff、负载力 Fload 和外部负载扭矩 Mload 的作用,
则速度可以通过以下公式计算:
(T - Ff*d - Fload*d)/J = α
其中,α表示电机的角加速度,d表示电机旋转的角位移。
通过积分我们可以得到速度与时间的关系:
ω=ω0+α*t
其中,ω0表示初始速度。
同时,我们还可以将电机的加速度和速度的关系推导为:
a=α*r
其中,a表示电机的线加速度,r表示负载半径。
综上所述,实际情况下考虑摩擦和负载的速度计算公式可以表示为:ω = (T - Ff * d - Fload * d) / J * t + ω0
在实际应用中,以上的速度计算公式可能需要根据具体的情况进行微调和修正,但这些公式提供了基本计算速度的方法和思路。
伺服电机额定电流计算公式
(实用版)
目录
1.伺服电机的概念及特点
2.伺服电机的额定电流计算公式
3.计算公式的应用示例
4.注意事项
正文
1.伺服电机的概念及特点
伺服电机,又称为控制电机,是一种将电脉冲转换为角位移或线位移的电机。
它具有高精度、高扭矩、高速度、高效率等优点,广泛应用于各种工业自动化控制系统中。
2.伺服电机的额定电流计算公式
伺服电机的额定电流计算公式为:Ie = (P × 1.732) / (U × cos φ)
其中:
Ie:伺服电机的额定电流(A)
P:伺服电机的额定功率(kW)
U:伺服电机的额定电压(V)
cosφ:伺服电机的功率因数,一般取 0.85
3.计算公式的应用示例
假设某伺服电机的额定功率为 5kW,额定电压为 380V,那么可以通过以下步骤计算其额定电流:
步骤 1:将已知数值代入公式
Ie = (5kW × 1.732) / (380V × 0.85)
步骤 2:进行计算
Ie = 32.34 / 323.8
Ie ≈ 0.105A
因此,该伺服电机的额定电流约为 0.105A。
4.注意事项
在计算伺服电机的额定电流时,应注意以下几点:
1)确保所选伺服电机的额定功率、电压等参数与实际应用场景相匹配,以免造成设备损坏或性能不佳。
2)计算出的额定电流仅供参考,实际使用中应根据负载情况、电缆长度等因素适当调整。
伺服电子齿轮比的计算方法电子齿轮比是伺服中经常要用到的,初学者对这个参数的设置有时会不解,先介绍两个伺服电子齿轮设置方面的2个小例子,供大家参考下。
例子1:已知伺服马达的编码器的分辨率是131072 P/R,额定转速为3000r/min,上位机发送脉冲的能力为200Kpulse/s,要想达到额定转速,那么电子齿轮比至少应该设为多少?计算如下图所示:根据上图中的算法,可以算出电子齿轮比CMX/CDV的值例子2:已知伺服马达的分辨率是131072 P/R,滚珠丝杠的进给量为 Pb =8mm。
(1) 计算反馈脉冲的当量(一个脉冲走多少)?△Lo=(2) 要求指令脉冲当量为0.1um/p, 电子齿轮比应为多少?电子齿轮比=(3) 电机的额定速度为3000rpm,脉冲频率应为多少?Fc =(a) 计算反馈脉冲的当量(一个脉冲走多少)?△Lo= 8mm/131072(b) 要求指令脉冲当量为0.1um/p, 电子齿轮比应为多少?△Lo×电子齿轮比×1000=0.1(c) 电机的额定速度为3000rpm,脉冲频率应为多少?Fc×电子齿轮比=3000/60×131072DDRVI 和DDRV A的用法区别一般伺服电机使用的最多的就是位置控制模式,其说明书上的接线,不要被吓到了。
cn1是控制端口;cn2是编码器反馈端口,不用管,有专用线的。
实际上,只用控制cn1的32、33、34、35,四根线就好了,这四根线分两组,32和33作为脉冲输入,34和35作为方向输入。
举个例子:我们把32(plus+)接上+24v,把33(plus-)接上0V,把34(dir+)接上+24v,把35(dir-)接上0V,就接成了最简单的伺服系统,发现没有,其实外部三根线就可以了,我们把32和34接在一起,共用电源正极。
不过,伺服是靠脉冲控制的,我们的线路只给伺服发了一个脉冲,而本套伺服是10000脉冲/转,那么它只转动了360/10000,呵呵,几乎没动一样,要使它连续运动,就要给它持续的脉冲,脉冲快,它转得快,脉冲多,它转得多。
伺服电机负载计算
摘要:
1.伺服电机的概念和应用
2.负载计算的重要性
3.负载计算的公式和方法
4.负载计算的实际应用案例
5.负载计算的注意事项
正文:
伺服电机是一种能够根据外部指令精确控制转速和转矩的电机,广泛应用于工业自动化、机器人、医疗设备等领域。
在进行伺服电机的选型和使用过程中,负载计算是非常重要的一个环节。
负载计算可以帮助我们了解伺服电机在实际工作中所能承受的负载大小,从而为设备的选型和使用提供依据。
负载计算的准确性直接影响到设备的性能、寿命和安全。
负载计算的公式和方法主要包括:
- 静态负载计算:静态负载=额定转矩×额定速度
- 动态负载计算:动态负载=静态负载+ 惯性负载
其中,额定转矩和额定速度是伺服电机的技术参数,需要在产品选型时确定。
惯性负载则与电机的转速变化和负载的惯性有关。
以某工业自动化设备为例,设备采用一台额定转矩为100Nm、额定速度为3000rpm 的伺服电机。
设备在工作过程中,需要将一个20kg 的工件沿
直线运动。
根据负载计算公式,静态负载
=100Nm×3000rpm=300000Nm/m,考虑到工件的惯性,动态负载会更大。
因此,在选型时应选择负载能力更强的伺服电机。
在实际应用中,负载计算还应注意以下几点:
1.考虑电机的散热条件,防止过热损坏;
2.考虑电机的防护等级,防止粉尘、水分等侵入电机;
3.考虑电机的安装方式,方便维护和更换。
总之,伺服电机的负载计算是设备选型和使用过程中不可忽视的一环。
已知:
1)上位机发出脉冲能力为200Kp/S,200×1000/s,200×1000×60/min;
2)电机额定转速为3000R/ min,3000/60s;
3)伺服电机编码器分辨率是131072;
4)丝杆螺距是10mm;
求:
1、电机额定转速运行时的电子齿轮比?
2、如果电子齿轮比是1,伺服电机的转速?
3、生产时,设定指令脉冲当量,确定电子齿轮比?
解:
1、当上位机满额发出脉冲时,伺服恰好额定速度运行:
1)电机额定转速为3000r/ min,3000r/60s=50r/s;
2) 伺服电机编码器分辨率是131072;
3)电机额定转速时编码器输出检测反馈脉冲频率是131072×50r/s;;
4)上位机发出脉冲能力时发出的脉冲频率=200×1000/s;
5)当上位机满额发出脉冲时,伺服恰好额定速度运行,这时的电子齿轮比:
电子齿轮比=反馈脉冲频率/上位机满额发出脉冲频率
=(131072×50r/s)/ 200×1000/s
=6553600/200000
=3.2768
2、如果电子齿轮比是1:
1)上位机发出的1个脉冲=编码器输出检测反馈的1个脉冲:
2)上位机发出脉冲能力时发出的脉冲频率=200×1000/s;
3)伺服电机的转速是=200×1000/s×60/131072= 91.55 r/min
3、如果丝杆螺距是10mm,
1)要求上位机每发一个指令脉冲,工件移动0.001mm,即指令脉冲当量为0.001mm,也可以说指令脉冲单位为0.001mm:
2)如果伺服转一周,丝杆转一周,减速比是1;
3)丝杆转一周,上位机应该发出的指令脉冲为10mm/0.001mm=10000(个);
4)伺服转一周,编码器检测反馈脉冲为131072(个);
5)电子齿轮比=编码器检测反馈脉冲/上位机发出的指令脉冲=131072/10000=13.7012;
1、从以上计算,现在我们知道:
1)当上位机满额发出脉冲时,伺服恰好额定速度运行,
电子齿轮比=反馈脉冲频率/上位机满额发出脉冲频率=3.2768
2)如果电子齿轮比是1:伺服电机的转速是==91.55 r/min
3)丝杆螺距是10mm,指令脉冲当量为0.001mm,电子齿轮比=编码器检测反馈脉冲/上位机发出的指令脉冲=13.7012;
2、现在我们还想知道,丝杆螺距是10mm,指令脉冲当量为0.001mm,加工时电机额定速度运行时的电子齿轮比?
3、丝杆螺距是10mm,指令脉冲当量为0.001mm,加工时电机额定速度运行时的电子齿轮比?
1)丝杆螺距是10mm,指令脉冲当量为0.001mm,电子齿轮比=编码器检测反馈脉冲/上位机发出的指令脉冲=13.7012;
2)当上位机满额发出脉冲时,伺服恰好额定速度运行,电子齿轮比=反馈脉冲频率/上位机满额发出脉冲频率=3.2768
3)只有1)、2)的电子齿轮比相等时,才可以保证当上位机满额发出脉冲时,伺服恰好额定速度运行,丝杆螺距是10mm,指令脉冲当量为0.001mm;
4)如果我们让上位机,不工作在额定状态,只工作在1/(13.7012/3.2768)额定频率上,而电机工作在额定转速下,这时的电子齿轮比是
电子齿轮比=反馈脉冲频率/【上位机满额发出脉冲频率×1/(13.7012/3.2768)】 =3.2768×(13.7012/3.2768)
=13.7012
5)这样,我们得出:
a、让上位机,不工作在额定状态,只工作在1/(13.7012/3.2768)额定频率上;
b、而电机工作在额定转速下;
c、丝杆螺距是10mm(减速比等于),指令脉冲当量为0.001mm;
d、电子齿轮比是=13.7012
4、如果电子齿轮比是1,伺服电机的转速是=200×1000/s×60/131072= 91.55 r/min,怎么能使电子齿轮比=1时,电机转快一点呢?
1)只要将编码器的刻线数降低,即编码器一周的反馈脉冲缩小(分频),电机的转速就会提高;
2)我们只要将编码器的解析度131072缩小到131072/(3000/91.55);3)伺服电机的转速=200×1000/s×60/【131072/(3000/91.55)】
=(200×1000/s×60/131072)×(3000/91.55)
=3000r/min;
4)我们只要将编码器的解析度131072缩小到131072/(3000/91.55):编码器的解析度= 131072/(3000/91.55)≈ 131072的32分频= 4096 ;5)电子齿轮比=1时,编码器的解析度是4096时,电机的转速为额定转速3000转/分!
5、我主楼计算的三种数字(a、电机额定转速运行时的电子齿轮比?b、如果电子齿轮比是1,伺服电机的转速?c、生产时,设定指令脉冲当量,确定电子齿轮比?)是有关电子齿轮比的三中应用:
1)“b、如果电子齿轮比是1,伺服电机的转速?”,指明要提高电机运行速度的方法,就是对编码器的解析度分频;
2)“a、电机额定转速运行时的电子齿轮比?”,要伺服以额定转速,按指令脉冲当量运行,指明了如何调整确定上位机的发出的指令脉冲频率及电子齿轮比;
3)“c、生产时,设定指令脉冲当量,确定电子齿轮比?”是所有计算的基础;
晒晒我们班的牛人600字初一范文三篇
【导语】每个学校每个班级都有那么几个牛人,或者学习好得不得了的人,或者体育好到不行但学习不怎么样的人,或者嘴皮子耍得好的人……以下是我们为大家带来的晒晒我们班的牛人600字初一范文三篇
,供大家参考。
篇一:
新的学期,新的开始。
步入初中以来,我认识了许许多多的新同学,他们都“身怀绝技”下面就由我向大家介绍几个。
他,外号“邓子”:绝技,超级男高音,是我们班出了名的“洪嗓子”。
我们这次合唱节,选了一首高音歌曲,唱到高音区,班上同学就开始扁着嗓子,满脸通红,声音全是哑的,唱完后连喘粗气,有的还连连咳嗽,而“邓子”就不一样了,他使出一半的力气就能把高音顶上去了。
他的声音十分清亮,如同泉水一般,几乎能盖过班上所有人的声音,以至所有的同学都看不过去,用手捂住他的嘴不让他唱!还有一次,大扫除,人们都在干活,他却像没事一样拿着个扫帚到别人耳边“啊——”尖叫,刺耳的尖叫声,使同学吓了一大跳,拿着扫帚去追他。
他,外号“牛羊”:绝技:搞笑。
这“牛羊”就跟他的名字一样,像牛一样壮,憨厚,却不像羊一样温顺。
比如说上次,“牛羊”上自习课讲话,被老师罚站到后面,人们都在写作业,他也不例外,而他的姿势却是最让人“神魂颠倒”:他弯着腰,靠着后面的墙,
右脚搭在左大腿上,摆个二郎腿,把作业放在右脚上,左脚弯曲,右手拿支笔,在作业上写写画画,时不时发出“呜呜”声响。
班长上前一看,原来他在画飞机打小鸟,“哈哈哈哈。
”上前的班长也笑了,接着,全班同学转过头来,异口同声地说:“怎么了?”牛羊滑稽地说道:“小鸟用嘴扎死了飞机,飞机漏油。
”“哈哈哈哈……”全班同学都笑了,称“牛羊”是个怪才,想像真个了得。
你别看牛羊这么调皮捣蛋,可他的思维却是非常好,那次上数学课,一个很难的奥数题难倒了全班,同学们拿着笔在纸上画来画去,都无从下手。
这时,牛羊举起了手,在跑上讲台的过程中,鞋子被自己踩掉了,差点摔倒,还笑呵呵的,引得同学哈哈的笑声……他说完了,语言惹得全班同学笑得合不拢嘴,并且全都听懂,还连连点头,一边鼓掌还一边说:“超乎常人思维。
”连老师都这么认为。