自动控制原理试卷及答案
- 格式:doc
- 大小:682.00 KB
- 文档页数:15
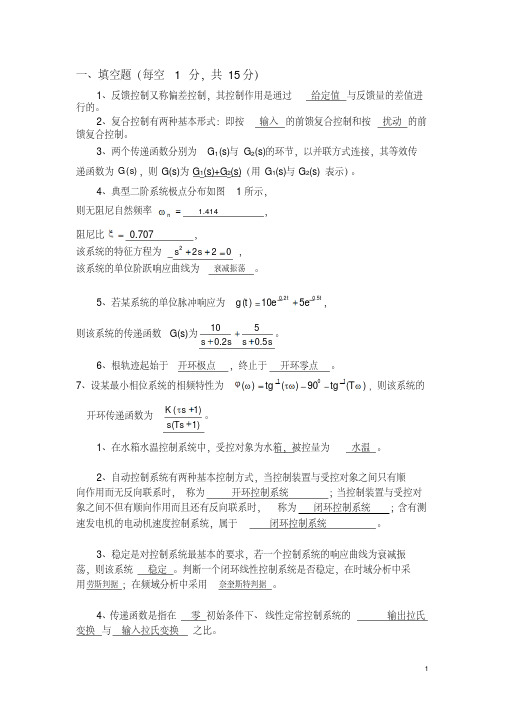



一、填空题(每空 1 分,共15分)1、反馈控制又称偏差控制,其控制作用是通过 给定值 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 输入 的前馈复合控制和按 扰动 的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为G 1(s)+G 2(s)(用G 1(s)与G 2(s) 表示)。
4、典型二阶系统极点分布如图1所示,则无阻尼自然频率=n ω 1.414 ,阻尼比=ξ 0.707 , 该系统的特征方程为 2220s s ++= ,该系统的单位阶跃响应曲线为 衰减振荡 。
5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为1050.20.5s s s s +++。
6、根轨迹起始于 开环极点 ,终止于 开环零点 。
7、设某最小相位系统的相频特性为101()()90()tg tg T ϕωτωω--=--,则该系统的开环传递函数为 (1)(1)K s s Ts τ++。
1、在水箱水温控制系统中,受控对象为水箱,被控量为 水温 。
2、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统 ;含有测速发电机的电动机速度控制系统,属于 闭环控制系统 。
3、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定 。
判断一个闭环线性控制系统是否稳定,在时域分析中采用劳斯判据;在频域分析中采用 奈奎斯特判据。
4、传递函数是指在 零 初始条件下、线性定常控制系统的 输出拉氏变换 与 输入拉氏变换 之比。
5、设系统的开环传递函数为2(1)(1)K s s Ts τ++,则其开环幅频特性为2222211K T τωωω++; 相频特性为arctan 180arctan T τωω--(或:2180arctan 1T T τωωτω---+) 。
自动控制原理试题及答案一、单项选择题(每题2分,共20分)1. 自动控制系统中,开环系统与闭环系统的主要区别在于()。
A. 是否有反馈B. 控制器的类型C. 系统是否稳定D. 系统的响应速度答案:A2. 在控制系统中,若系统输出与期望输出之间存在偏差,则该系统()。
A. 是闭环系统B. 是开环系统C. 没有反馈D. 是线性系统答案:B3. 下列哪个是控制系统的稳定性条件?()A. 所有闭环极点都位于复平面的左半部分B. 所有开环极点都位于复平面的左半部分C. 所有闭环极点都位于复平面的右半部分D. 所有开环极点都位于复平面的右半部分答案:A4. PID控制器中的“P”代表()。
A. 比例B. 积分C. 微分D. 前馈答案:A5. 在控制系统中,超调量通常用来衡量()。
A. 系统的稳定性B. 系统的快速性C. 系统的准确性D. 系统的鲁棒性答案:C6. 一个系统如果其开环传递函数为G(s)H(s),闭环传递函数为T(s),则闭环传递函数T(s)是()。
A. G(s)H(s)B. G(s)H(s)/[1+G(s)H(s)]C. 1/[1+G(s)H(s)]D. 1/G(s)H(s)答案:B7. 根轨迹法是一种用于()的方法。
A. 系统稳定性分析B. 系统性能分析C. 系统设计D. 系统故障诊断答案:B8. 一个系统如果其开环传递函数为G(s)H(s),闭环传递函数为T(s),则T(s)的零点是()。
A. G(s)的零点B. H(s)的零点C. G(s)和H(s)的零点D. G(s)和H(s)的极点答案:A9. 一个系统如果其开环传递函数为G(s)H(s),闭环传递函数为T(s),则T(s)的极点是()。
A. G(s)的零点B. H(s)的零点C. 1+G(s)H(s)的零点D. G(s)和H(s)的极点答案:C10. 一个系统如果其开环传递函数为G(s)H(s),闭环传递函数为T(s),则系统的稳态误差与()有关。
1《自动控制原理》试卷(A 卷)一、 用运算放大器组成的有源电网络如图所示,试采用复数阻抗法写出它的传递函数。
(10分)(1图 )(3图)二、假设某系统对于单位阶跃输入信号的响应为t te et y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
(b) 确定该系统的阻尼系数。
(10分)三、试用梅逊增益公式求图中系统的闭环传递函数。
(写出步骤)(10分)四、控制系统的结构如图所示,设 r(t ) = t ⋅ 1(t ) ,p (t ) = 1(t )定义e (t ) = r(t ))(t y -,试求系统的稳态误差。
(10分))(t p )(t r -++)(t y 1+s )1(1+s s +(4图)五、试确定题图所示系统参数K 和ξ的稳定域。
(写步骤)(10分)(5图)六、设单位反馈控制系统的开环传递函数为(1) 绘制根轨迹,并加以简要说明。
(2) 当系统的阻尼振荡频率s rad /1d =ω时试确定闭环主导极点的值与相应的增益值。
(15分)七、最小相位系统的开环对数幅频特性的渐近线如图所示,确定系统的开环传递函数。
(10分)八、已知最小相位系统校正前后系统的折线对数幅频特性如图所示,其中Lo(ω)为校正前特性,L开(ω)为校正后特性。
(1)试作出校正装置的对数幅频特性Lc(ω)(折线);(2)试写出校正装置的传递函数Gc(s);(3)计算校正后系统的相位裕度γ。
(15分)cp为s右半平面上的开环根的个数,v为开九、设开环系统的奈氏曲线如下图所示,其中,环积分环节的个数,试判别闭环系统的稳定性。
(10分)(a)(b)2《自动控制原理》试卷(B 卷)一、 求下图所示系统的传递函数)(/)(0s U s U i 。
(10分)(1图) (3图)二、假设某系统对于单位阶跃输入信号的响应为t t e e t y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
自动控制原理考试试卷及答案一、选择题(每题2分,共20分)1. 下列哪项不是自动控制系统的基本组成部分?A. 控制器B. 被控对象C. 执行机构D. 操作人员答案:D2. 在自动控制系统中,下列哪项属于反馈环节?A. 控制器B. 执行机构C. 被控对象D. 反馈元件答案:D3. 下列哪种控制方式属于闭环控制?A. 比例控制B. 积分控制C. 微分控制答案:D4. 下列哪种控制方式属于开环控制?A. 比例控制B. 积分控制C. 微分控制D. 比例-积分控制答案:A5. 在自动控制系统中,下列哪种控制规律不会产生稳态误差?A. 比例控制B. 积分控制C. 微分控制D. 比例-积分-微分控制答案:B6. 下列哪种控制方式适用于一阶惯性环节?A. 比例控制B. 积分控制C. 微分控制答案:A7. 在自动控制系统中,下列哪种环节不会产生相位滞后?A. 比例环节B. 积分环节C. 微分环节D. 比例-积分环节答案:A8. 下列哪种控制方式可以使系统具有较好的稳定性和快速性?A. 比例控制B. 积分控制C. 微分控制D. 比例-积分-微分控制答案:D9. 在自动控制系统中,下列哪种环节可以使系统具有较好的阻尼效果?A. 比例环节B. 积分环节C. 微分环节D. 比例-积分环节答案:C10. 下列哪种控制方式可以使系统具有较好的跟踪性能?A. 比例控制B. 积分控制C. 微分控制D. 比例-积分-微分控制答案:D二、填空题(每题2分,共20分)1. 自动控制系统的基本组成部分有:控制器、被控对象、执行机构、________。
答案:反馈元件2. 在自动控制系统中,反馈环节的作用是________。
答案:减小系统的稳态误差3. 闭环控制系统的特点有:________、________、________。
答案:稳定性好、快速性好、准确性高4. 开环控制系统的缺点有:________、________、________。
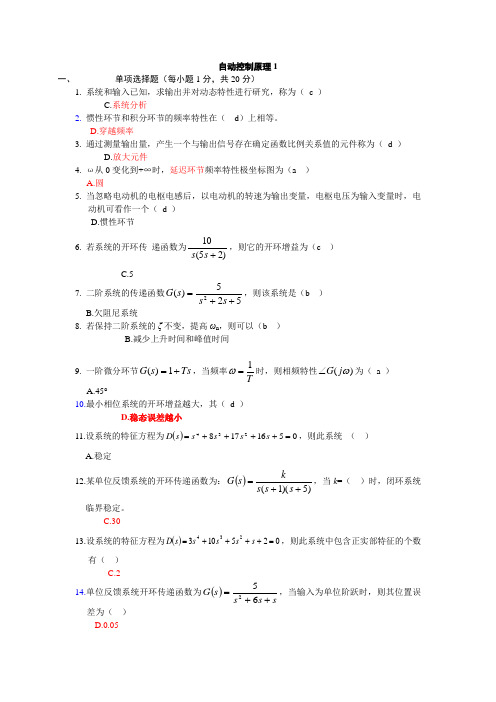
自动控制原理1一、 单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为( c )C.系统分析2. 惯性环节和积分环节的频率特性在( d )上相等。
D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( d )D.放大元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为(a )A.圆5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( d )D.惯性环节6. 若系统的开环传 递函数为2)(5 10+s s ,则它的开环增益为(c ) C.57. 二阶系统的传递函数52 5)(2++=s s s G ,则该系统是(b ) B.欠阻尼系统8. 若保持二阶系统的ζ不变,提高ωn ,则可以(b )B.减少上升时间和峰值时间9. 一阶微分环节Ts s G +=1)(,当频率T1=ω时,则相频特性)(ωj G ∠为( a ) A.45°10.最小相位系统的开环增益越大,其( d )D.稳态误差越小11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( )A.稳定12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s k s G ,当k =( )时,闭环系统临界稳定。
C.3013.设系统的特征方程为()025103234=++++=s s s s s D ,则此系统中包含正实部特征的个数有( )C.214.单位反馈系统开环传递函数为()ss s s G ++=652,当输入为单位阶跃时,则其位置误差为( )D.0.0515.若已知某串联校正装置的传递函数为1101)(++=s s s G c ,则它是一种( ) D.相位滞后校正16.稳态误差e ss 与误差信号E (s )的函数关系为( )B.)(lim 0s sE e s ss →=17.在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是( )A.减小增益18.相位超前校正装置的奈氏曲线为( )B.上半圆19.开环传递函数为G (s )H (s )=)3(3+s s K ,则实轴上的根轨迹为( ) C.(-∞,-3)20.在直流电动机调速系统中,霍尔传感器是用作( )反馈的传感器。
试题一答案 1、给定值2、输入;扰动;3、G 1(s)+G 2(s); 40.7072=;2220s s ++=;衰减振荡 5、1050.20.5s s s s+++; 6、开环极点;开环零点 7、(1)(1)K s s Ts τ++8、1()[()()]p u t K e t e t dt T =+⎰;1[1]p K Ts+; 稳态性能 1、D 2、A 3、C 4、A 5、D 6、A 7、B 8、C 9、B 10、B解:1、建立电路的动态微分方程 根据KCL有200i 10i )t (u )]t (u )t (d[u )t (u )t (u R dt C R =-+-(2分)即 )t (u )t (du )t (u )()t (du i 2i 21021021R dtC R R R R dt C R R +=++ (2分)2、求传递函数对微分方程进行拉氏变换得)(U )(U )(U )()(U i 2i 21021021s R s Cs R R s R R s Cs R R +=++ (2分)得传递函数 2121221i 0)(U )(U )(R R Cs R R R Cs R R s s s G +++==(2分) 解:1、(4分) 22222221)()()(n n n s s K s K s K sK s K s Ks R s C s ωξωωββ++=++=++==Φ 2、(4分) ⎩⎨⎧=====2224222n n K K ξωβω ⎩⎨⎧==707.04βK3、(4分) 0010032.42==--ξξπσe83.2244===ns t ξω4、(4分) )1(1)(1)(2+=+=+=s s K s s K sK s K s G βββ ⎩⎨⎧==11v K K β414.12===βKss K Ae 5、(4分)令:0)()(11)()()(=s s G ss K s N s C s n n ∆-⎪⎭⎫ ⎝⎛+==Φβ 得:βK s s G n +=)(五、(共15分)1、绘制根轨迹 (8分)(1)系统有有3个开环极点(起点):0、-3、-3,无开环零点(有限终点);(1分)(2)实轴上的轨迹:(-∞,-3)及(-3,0); (1分)(3) 3条渐近线: ⎪⎩⎪⎨⎧︒︒±-=--=180,602333a σ (2分) (4) 分离点: 0321=++d d 得: 1-=d (2分)432=+⋅=d d K r (5)与虚轴交点:096)(23=+++=r K s s s s D[][]⎩⎨⎧=+-==+-=06)(Re 09)(Im 23r K j D j D ωωωωω ⎩⎨⎧==543r K ω (2分) 绘制根轨迹如右图所示。
1《自动控制原理》试卷(A 卷)一、 用运算放大器组成的有源电网络如图所示,试采用复数阻抗法写出它的传递函数。
(10分)(1图 )(3图)二、假设某系统对于单位阶跃输入信号的响应为t t e e t y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
(b) 确定该系统的阻尼系数。
(10分)三、试用梅逊增益公式求图中系统的闭环传递函数。
(写出步骤)(10分)四、控制系统的结构如图所示,设 r(t ) = t ⋅ 1(t ) ,p (t ) = 1(t )定义e (t ) = r(t ))(t y -,试求系统的稳态误差。
(10分)(4图)五、试确定题图所示系统参数K 和ξ的稳定域。
(写步骤)(10分)(5图)六、设单位反馈控制系统的开环传递函数为(1) 绘制根轨迹,并加以简要说明。
(2) 当系统的阻尼振荡频率s rad /1d =ω时试确定闭环主导极点的值与相应的增益值。
(15分)七、最小相位系统的开环对数幅频特性的渐近线如图所示,确定系统的开环传递函数。
(10分)八、已知最小相位系统校正前后系统的折线对数幅频特性如图所示,其中Lo(ω)为校正前特性,L开(ω)为校正后特性。
(1)试作出校正装置的对数幅频特性Lc(ω)(折线);(2)试写出校正装置的传递函数Gc(s);(3)计算校正后系统的相位裕度γ。
(15分)cp为s右半平面上的开环根的个数,v为开九、设开环系统的奈氏曲线如下图所示,其中,环积分环节的个数,试判别闭环系统的稳定性。
(10分)(a)(b)2《自动控制原理》试卷(B 卷)一、 求下图所示系统的传递函数)(/)(0s U s U i 。
(10分)(1图) (3图)二、假设某系统对于单位阶跃输入信号的响应为t t e e t y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
(b) 确定该系统的阻尼系数。
(10分)三、系统的信号流图如图所示,求输出C (S )的表达式。
(10分)四、反馈控制系统如图所示,如果要求闭环系统的特征根全部位于S 平面上虚轴的左面,试确定参数K 的取值范围。
(10分)(4图) (5图)五、已知系统结构图如下图所示,试写出闭环传函,并计算输入信号为r(t)=0.5t 时的稳态误差。
(10分)六、已知单位反馈系统的开环传递函数,1()(1)(3)K G s s s s =++绘出当K 1变化时系统的根轨迹图,并加以简要说明。
(15分)七、最小相位系统的开环对数幅频特性的渐近线如图所示,确定系统的开环传递函数。
(10分)八、已知最小相位系统校正前后系统的折线对数幅频特性如图所示,其中Lo(ω)为校正前特性,L开(ω)为校正后特性。
(1)试作出校正装置的对数幅频特性Lc(ω)(折线);(2)试写出校正装置的传递函数Gc(s);γ。
(3)计算校正后系统的相位裕度c(15分)p为s右半平面上的开环根的个数,v为开九、设开环系统的奈氏曲线如下图所示,其中,环积分环节的个数,试判别闭环系统的稳定性。
(10分)(b)(b)3河南理工大学 2010-2011 学年第 一 学期《自动控制原理》试卷(B 卷)一、 用运算放大器组成的有源电网络如图所示,试采用复数阻抗法写出它的传递函数。
(10分)(1图) (3图)二、试用梅逊增益公式求下图中系统的闭环传递函数。
(写出步骤)(10分)三、控制系统结构图如图所示:(1)当T=0时,试求系统的阻尼比ζ,无阻尼自然振荡角频率ωn 和单位斜坡函数输入时系统的稳态误差。
(2)当ζ=0.7,试求系统中的T 值和单位斜坡函数输入时系统的稳态误差。
【单招班不做(2)】(15分)四、设单位反馈控制系统的开环传递函数为:)10)(4()(++=s s s Ks G(1)确定使系统稳定的K 值范围;(2)要使系统闭环极点的实部不大于-1,试确定K 的取值范围。
(10分)五、设系统开环传递函数如下,试画出b 从零变到无穷时的根轨迹图。
(15分)))(4(20)(b s s s G ++=。
六、已知最小相系统的Bode 图如图所示。
写出对应的传递函数G (s )的表达式,并求。
和h γ (20分)七、设开环系统的奈氏曲线如下图所示,其中,p 为s 右半平面上的开环根的个数,v 为开环积分环节的个数,试判别闭环系统的稳定性。
(10分)(a) (b)八、已知最小相位系统校正前后系统的折线对数幅频特性如图所示,其中Lo(ω)为校正前特性,L 开(ω)为校正后特性。
(1)试作出校正装置的对数幅频特性Lc(ω)(折线);(2)试写出校正装置的传递函数Gc(s);(10分)1答案一、 应用复数阻抗法,如图所示计算反馈复数阻抗:则反馈复数阻抗为:(5分)对于反相运算电路,其传输关系为:输入阻抗为:将输入阻抗与反馈阻抗代入上式,得到传递函数为:(5分)二、(a) 在零初始条件下,输出的拉普拉斯变换是)10)(60(600102.1602.01)(++=+-++=s s s s s s s y 。
输入s s x /1)(=,所以闭环传递函数为60070600)10)(60(600)()()(2++=++==s s s s s x s y s G 。
(b) 对照2nn 22n 2)(ωζωω++=s s s G ,可得6002n =ω,49.24610n ==ω。
于是 43.165.3270n ≈==ωζ。
评分标准:每小问答对得5分,共10分。
三、L1=-G1G2H1, L2=-G3H2, L3=-G2H3, L1L2=G1G2G3H1H2; (3分) P1=G1G2G3, △1=1; P2=-G3G4, △2=1+G1G2H1 (2分)213213223121121343211)1()()(H H G G G H G H G H G G H G G G G G G G s R s C +++++-=(5分)四、)(1)1()(r 11)(22s p s s s s s s s s s y +++++++=)(1)1()(1)()(r )(222s p s s s s s r s s s s y s s e +++-++=-=ss s s s s s s s 11)1(112222⋅+++-⋅++= 111122+++-++=s s s s s 122++=s s s (5分) 01lim )(lim 2200=⎭⎬⎫⎩⎨⎧++==→→s s s s s se e s s ss (5分) 五、闭环传函为:(2分)闭环特征方程为: (1分)由劳斯判据,作劳斯表:(5分)令第一列系数全部大于零,解出:(2分)六、解: (1)分离点:d1=-3.414; d2=-0.586。
(5分)(2)闭环特征方程为02)1(s 2=+++g g K s K ,设闭环主导极点为j a s +=,代入闭环特征方程中得到:02))(1()(2=+++++g g K j a K j a ,得到实部方程和虚部方程分别为:12012)1(a 2=++=-+++g g g K a K K a解出:5,31,12211=-==-=g g K a K a , 所以有:5,3;1,j 1=±-==±-=g g K j s K s 。
(10分)七、)16)(1()8(200)1161)(1(s 1)s 81100(G(s)22+++=+++=s s s s s s 评分标准:酌情打分。
共10分。
八、评分标准:每问5分。
共15分。
九、(a )R=-1,Z=P-2R=2, 闭环不稳定,有2个正根。
(b )R=1/2,Z=P-2R=0, 闭环稳定。
评分标准:每图5分。
共10分。
2答案一、)1()()(3132320+++-=CS R R R R CS R R s U s U i 评分标准:写对得分,写错不得分, 共10分 二、(同卷1第二题)三、L1=G1H3,L2=G2H4,L3=G4H1,L4=G3H2,L5=G4H3G3H4,L6=G2H2G1H1,L1L2=G1G2H3H4,L3L4=G4G3H1H2。
(5分)(5分)四、闭环传函为:(2分)闭环特征方程为:(1分)由劳斯判据,作劳斯表:(5分)令第一列系数全部大于零,解出:(2分)五、(1)系统闭环传函:(3分)(2)(7分)另解:G 开=G 闭/(1-G 闭)=5(0.2s+1)/0.05S 2系统为2型系统,斜坡输入时的稳态误差为零。
所以,e ss =0。
六、(1) 开环极点: p1=0,p2=-1,p3=-3 (1分) 实轴上的根轨迹区间: (-∞,-3],[-1,0](1分) 渐进线:013433a σ--==-00060(0)(21)180(1)360(1)a k k k k πϕ⎧⎪⎨⎪⎩=+===-=- (2分)分离点:111013d d d ++=++解得d1=-0.45,d2=-2.2。
d2=-2.2不在根轨迹上,舍去。
(3分)与虚轴交点:特征方程321()430D s s s s K =+++= 将s =j ω代入后得2134030K ωωω⎧⎪⎨⎪⎩-=-= 解之得ω= 112K = (3分)当 ∞<≤10K 时,按 180相角条件绘制根轨迹如图所示。
(5分) 七、)2()5.0(2)15.0(s 1)0.5(2s G(s)22++=++=s s s s 评分标准:酌情打分。
共10分。
八、(同卷1第八题)九、(a )R=0,Z=P-2R=0, 闭环稳定。
(b )R=1-1=0,Z=P-2R=1, 闭环不稳定,有1个正根。
评分标准:每图5分。
共10分。
3答案一、(同卷1第一题)二、存在三个回路:312323431G H G G H G G H ∆=+++ (5分) 存在两条前向通路:1123451262,1,P G G G G G P G =∆==∆=∆ (3分) 所以:12345631343232()()1G G G G G C s G R s G H G G H G G H =++++ (2分)三、(1)当T =0时:开环传函为:)15.0(4)2(8)(+=+=s s s s s G 开 (1分) 闭环传函为:828)(2++=s s s G 闭 (1分) 根据闭环传函表达式,与标准式子比较得:828.2228≈==n ω (1分) 由:22n =ξω,解得:354.01≈=n ωξ。
(1分)由开环传函表达式知:型别V=1,K=4,则:25.01e ==K ss (3分) (2) 加入速度反馈后,开环传函为:)82(8)2(1)2(8)(T s s s s s s s G ++=+++=开 (2分) 闭环传函为:8s )828)(2+++=T s s G (闭 (1分) 根据闭环传函表达式,与标准式子比较得:828.2228≈==n ω (1分) 根据已知条件有:22*7.0*2282==+n T ξω,解得:T=0.245。