并联舵机杆力开关故障检测覆盖率低的改进
- 格式:pdf
- 大小:1.14 MB
- 文档页数:2
小型渔船舵系问题及改进方法探讨_调查报告小型渔船舵系及其改进方法。
城市渔船检查站首先,方向舵系统的重要性小型渔船的舵系统是控制船舶航向、保证船舶安全航行的重要机械设备。
如果舵机-转向系统失灵,整艘船将失去控制,甚至导致重大事故,如碰撞和岩石。
因此,舵机必须运行可靠、生命力强、操作方便、运行稳定、易于维护和管理、经济性高。
在小型渔船的检验项目中,舵设备虽然检验内容不大,但也是一种综合性的设备,内容丰富,理论性强,涉及船、机、电。
长期的渔业生产实践表明,渔船安全事故的形式多种多样,尤其是海上不可预测的恶劣作业条件。
此外,舵设备等一些缺陷对某些人来说并不重要,这些缺陷随时可能逐渐发展并导致严重的灾难,造成碰撞事故或由于舵设备的丢失而导致船舶失去机动性。
因此,舵设备的检查应与其他项目相同。
不应该掉以轻心,应该给予足够的重视。
二、原船舶舵系问题通常,我们在检查渔船的上排和码头时,发现上舵杆的上、下工作轴颈普遍存在严重磨损、形状不规则、表面点蚀、表面粗糙等现象,其中中性位置经常有不同程度的气穴现象,轴承磨损严重,使用寿命短。
普通修理只能通过覆盖光滑轴颈或光滑轴颈并更换轴承来解决。
一般来说,上下舵轴承和轴颈在极限间隙范围内的使用寿命只有四年左右。
特别是,由于腐蚀、磨损、碰撞和其他因素,舵销的形状非常不规则。
它通常呈锥形和椭圆形,严重情况下偏差可达10毫米。
对于较轻的情况,需要堆焊和抛光。
对于重型情况,必须将方向舵从转向轴中拉出,以使车辆平稳。
修理过程复杂且成本高,难以保证转向轴的基本强度和舵叶的修理质量。
以下是近年来三艘渔船的舵系统试验数据的一个例子,当时三艘渔船的舵系统在更换和替换试验之前没有得到改进。
1.对于浙江瑞宇15__x船,上舵杆的上轴颈磨损为2.8毫米,与轴承的平均间隙为4.2毫米,下轴颈磨损为3.5毫米,与轴承的平均间隙为5.5毫米,舵销俯仰偏差为7.0毫米,俯仰偏差为5.0毫米2.浙江瑞宇013__船上舵杆上轴颈磨损3.0毫米,与轴承平均间隙4.8毫米,下轴颈磨损4.5毫米,与轴承平均间隙7.0毫米,舵销偏斜6.0毫米3.对于浙江瑞宇013__船,上舵杆的上轴颈磨损为4.0毫米,与轴承的平均间隙为6.0毫米,下轴颈磨损为5.5毫米,与轴承的平均间隙为8.0毫米,舵销俯仰偏差为10.0毫米,俯仰偏差为8.0毫米三、舵系改进的方法和效果针对上述情况,我们研究并探讨了解决问题的方法,采用了上舵杆上下工作轴颈、舵销红套和2cri3不锈钢套的方法来解决问题。
宁道标001轮舵机存在问题及整改建议宁道标001轮自2007年底出厂至今,舵机在使用过程中出现了几次异常及故障,给我轮的工作和安全带来很大不便与隐患。
一、舵机存在问题:1、在2008年使用过程中,多次发现舵由手动跳转到随动并舵角自动回零,由于发现及时并没造成后果。
如2008年4月3日,我轮在上驶至B11黑浮时,发现打左舵时舵角向右转,于是立即就近抛锚,经查发现控制方向的电磁继电器有粘连和回位迟缓的现象。
后更换解决。
在2008年11月厂家来人在驾驶室操舵装置内加了一个模块,暂时解决了舵由手动跳到随动并舵角自动回零的现象。
后舵机一直正常。
2、2010年6月四日下午,我轮在下驶至33号红浮下时,舵角忽然由正舵转至左舵30,在转的过程中用手动和随动扳动舵柄均无效,直至舵角转至左舵30时扳动舵柄才有动作。
靠泊码头后检查发现K1继电器触头烧熔粘连,随即更换。
随后联系厂房人员于6月13日上船检查,发现当一开启电源时,K1、K2就左右跳个不停,并在触头上出现电弧,按其工作原理,不操舵时K1、K2应不动作。
并同时发现我轮驾驶室三套操舵系统都是通过同一套线路到舵机房,当时我们就向厂方提出这样是违反《规范》要求的,存在很大的安全隐患,厂方当时承诺下个星期来进行线路改造,但至今未有人来。
当时采取的措施是在电路中增加4个二极管以减少K1、K2继电器电弧,以保护触头。
3、2010年6月27日上午,我轮在下驶至B9红浮下时发现舵失灵,三套操舵系统均不动作,立即就近抛锚抢修,经查是通往舵机房的电源线触头松掉所致。
这次舵机故障突显了三套操舵系统共用一个线路的风险与危害。
这几次舵机故障虽然在我轮驾引人员的正确处置下未出事,但其后果是极其严重的,也是不堪设想的。
鉴于我轮舵机存在以上严重缺陷,现要求对我轮操舵系统进行改装,使其符合SOLAS所规定的要求。
详见SOLAS第Ⅱ-1/29 条操舵装置:2 重要要求应设有两个独立的操舵装置控制系统,其布置应能保证在两者之一发生机械或电气故障时不会导致另一系统不能工作。
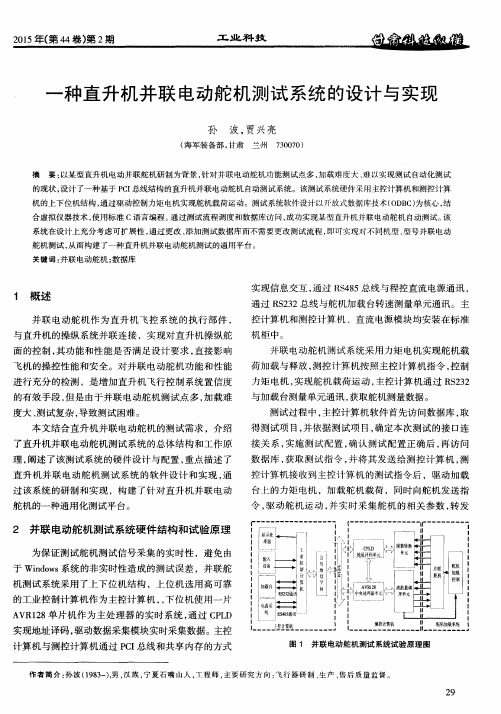

摘要船舶舵机是船舶航行的重要设备,船舶就是要依靠操纵舵机来控制或改变航向。
所以对船舶实施PSC或FSC安全检查时,安检人员必须对舵机进行相应设备检查或船员操作检查,以验证设备的性能及船的适应能力是否符合公约及有关法律的要求。
本文通过船舶舵机技术规范的介绍以及船舶舵机检查中易出现的问题和检查重点进行分析,使安检人员在进行舵机安检工作时能有所启迪。
通过介绍舵机原理及组成,分系其发生故障的主要原因,提出舵机系统安全检测方法及防范措施,提高了舵机系统的可靠性。
关键词:舵机;公约规定;安全检测AbstractModern shipbuiding ider is updating along with theDevelopment of scientific technology and productive and theDemend of management which is scientific and modern sinceTwenty-first century,the world shipbuilding mode is coming intu Times of development speedly ,we must widen our horrizon all the More,build advanced shipbuilding system with historicalandDeveloping eyes sight and overall and entirely concept。
So the Precision control is a more significant link in the processofShipbuilding in order to heighten whole level , we must push Precision mannagement, come true precision control with efficiency,exploit and introduce into the modern measure technology means, mend the process arts and crafts,reduce amend capacity of fieldworke,improve the working efficiency ,reduce the building cost , so that it can keepthe technology capability and quality of ship ,improve hull‘s building level and walking in world modren level accordingly。

关于舵机故障的几点思考作者:马立国任晓志许钥来源:《科技资讯》2018年第09期摘要:本文结合操舵仪理论知识和实际工作经验,通过对某船厂修改造后舵机出现两次故障的分析和解决。
认真分析故障现象,及时定位排查,通过维修和调试,归纳总结出操舵仪和舵机故障的几种解决方法,为今后船舶在航行过程中再出现类似的故障现象提供了借鉴经验,节省了处置时间。
为船舶的安全航行提供了可靠保障。
关键词:操舵仪舵机故障分析解决方法中图分类号:U664 文献标识码:A 文章编号:1672-3791(2018)03(c)-0089-02俗话说“大海航行靠舵手”,虽然随着现代航海技术的迅猛发展,舵手的重要性似乎有所下降,但舵机的重要性却是不可动摇的。
我记得老船长曾经讲过:“一个好的驾驶员首先确保的是两机一密不出问题,即舵机、主机和船舶的水密性不出问题。
”这足以说明舵机在整个船舶系统的重要性,如何确保舵机的正常运行对于航行安全至关重要,这就对航海人员对舵机性能的掌握和突发故障的解决提出了更高的要求。
1 两次舵机故障的经过和解决方法1.1 操舵仪故障事例12017年某船在船厂中修改造,中修完毕后计划5月15日离船厂码头到东海海域进行试航,在5月13日上午的备舵过程中,岗位人员发现舵机无法向右打舵,舵机不执行向右的舵角命令,立即报告当班驾驶员。
由于当时是中修后首次出航前的备航,事故出现的突然,时间紧急。
立即组织相关人员对操舵仪进行事故分析和线路排查,通过一个多小时的排查和线路检测,最后发现舵机右路信号线路松动接触不良无法正常传输舵机的命令信号。
通过对接线的重新插接和测试,舵机恢复正常。
1.2 舵机故障事例22017年6月某船正在东海试航,操舵人员突然发现舵机失控,立即报告驾驶员,采取应急方式操舵无效,同时通知船长和机舱值班,机电值班人员迅速转换舵机舱操舵,启动液压人力操舵方式。
检查发现右舵机组伺服机构连杆因脱落导致舵机失灵,按照应急预案处置方法,相关船员经过紧急抢修,舵机恢复正常运行。
船舶舵机原理及故障的分析与预防摘要:舵机的工作状态对于船体的安全运行具有重要的影响,因此,下文首先介绍船舶舵机的工作原理和结构组成,其次就现实运行中常见的故障问题,对于检修人员提出了几个检修维护意见,希望他们能够降低危险的发生概率。
关键词:船舶舵机;故障分析;预防措施引言:船舶舵机是轮船航行中的主要指引工具,船舵能够利用操作杆控制轮船的行驶方向,因此在轮船的安全系统检测工作中应该加强这个部分的检修维护力度。
维护人员需要了解舵机的工作原理以及内部构造组成,方便在检修的时候发现问题及时做出合适的方案解决,将风险损失降低到最小,保证轮船上面人员的生命健康安全。
一、船舶舵机工作原理以及工作组成部分(一)船舶舵机的作用以及原理船舶在运行的过程中需要舵机操纵行驶的方向,舵机在整体的结构中不仅具有保持固定航向的能力,同时还可以改变轮船的运动方向,是轮船结构中的重要组成部分,舵机属于轮船的操作系统,舵身是一块具有流线形状的面板,通常被称为舵叶,这个部分被安装在船尾的纵剖面中,能够垂直和水面接触,并且绕着舵杆进行不停的规律转动。
当水流以一定的角度冲到舵叶上面时,于是便可以产生流动的作用力,这种作用力沿着舵杆传送到船体的内部,因此可以迫使船体改变方向运行,也就可以达到转向的目的。
(二)船舶舵机的结构组成和特点舵机除了本身的硬件设备之外还需要包含操舵装置,能源控制系统以及其他的辅助零件等。
转舵装置内部主要有执行油缸,电动机以及相关传动装置。
操舵装置是连接船舶驾驶台和舵机执行结构之间的部分,能够快速将操作指令进行传输,并且控制舵机改变行船的方向和速度,保证轮船在驾驶员的意图下行驶。
转舵机的执行能源可以利用多个方面的设备共同执行,例如电力能源,液压能源,蒸汽,人工,机器等。
系统的工作以及运转同样离不开必要的控制元件和辅助设备等。
按照驱动方式的不同可以分为手动液压舵机,人力机械舵机,蒸汽舵机以及电动舵机等多种形式。
其中液压舵机是目前应用非常广泛的一种方式,因为重量比较轻,灵敏度高,工作状态平稳能够抵御风浪的冲击,在很多的现代化轮船中被广泛应用。
基于改进SOGI-FLL的旋转弹舵机滞后测试方法
张鑫;林凡;沈鑫杰
【期刊名称】《兵工学报》
【年(卷),期】2023(44)2
【摘要】针对旋转弹舵机滞后测试中存在的噪声及常值偏移问题,将2阶广义积分锁频环(SOGI-FLL)改进后应用于测试数据处理,以精确地得到舵机滞后角。
舵机滞后角测试问题的本质是存在噪声及常值偏移下的正弦信号相位提取问题。
通过在常规SOGI-FLL中引入常值偏移补偿回路,使其具有常值偏移扰动抑制能力。
改进SOGI-FLL表现为带通滤波器特性,可实现正弦信号基波频率处无滞后无衰减的滤波,有效消除噪声及常值偏移的影响,其输出的正交信号供给带有PI环节的锁相环(PLL)进行相角估计。
仿真和实验结果表明,在测试信号存在噪声及常值偏移时,相比于传统FFT方法和相关分析法,改进SOGI-FLL能够有效地提高滞后角处理精度。
【总页数】9页(P428-436)
【作者】张鑫;林凡;沈鑫杰
【作者单位】北京理工大学机械与车辆学院;北京理工大学宇航学院
【正文语种】中文
【中图分类】TP211
【相关文献】
1.可连续旋转电动舵机系统的加载效率测试方法
2.考虑效率补偿的旋转弹舵机控制耦合解耦算法
3.旋转弹舵机控制滞后及其对策研究
4.旋转弹舵机控制滞后及延迟补偿时间分析
5.小型旋转弹电动舵机控制系统的设计与实现
因版权原因,仅展示原文概要,查看原文内容请购买。
论文题目:液压舵机的故障分析及处理措施二级学院:轮机工程学院专业:轮机工程技术目录1 引言2 液压舵机概述2.1 液压舵机的基本工作原理2.2 船舶建造规范对舵机的基本要求3 液压舵机的故障分析3.1 液压舵机无舵3.2 液压舵机跑舵——稳舵时偏离所停舵角3.3 液压舵机舵速太慢3.4 液压舵机滞舵3.5 实际舵角与操舵角不符4 液压舵机故障的解决措施4.1 检查应急舵的有效性------------------------------------------------74.2 检查舵角指示的准确性----------------------------------------------84.3 检查舵角限位器的有效性--------------------------------------------84.4 检查舵的液压系统的密封性能----------------------------------------84.5 检查液压油的品质--------------------------------------------------84.5.1 液压油性能指标一般应符合以下要求------------------------------8 4.5.2 液压油污染的主要原因------------------------------------------94.6 舵机检查的其他注意事项-------------------------------------------11结论---------------------------------------------------------------------11 致谢-------------------------------------------------------------------12 参考文献-----------------------------------------------------------------131 引言据资料介绍:船舶能够在水中按照驾驶员的意图航行,使船舶改变航向或维持指定航向,使依靠改变安装在船舶尾部的船舵的位置来实现的。
船舶舵机控制章节一:引言船舶舵机是船舶控制系统中的重要组成部分,它通过控制舵轮的姿态,实现船舶的转向操作。
在现代船舶中,舵机通常由液压系统驱动,其控制稳定性对船舶操纵性和安全性具有重要影响。
因此,研究船舶舵机控制是航海技术研发领域的重要方向之一。
章节二:船舶舵机控制系统船舶舵机控制系统主要由液压舵机、舵轮系统、惯性导航单元和舵机控制器等组成。
液压舵机由液压缸和舵机机构组成,通过液压系统的力传递和舵机机构的机械连接,实现舵轮的角度控制。
舵轮系统则是船舶舵机控制系统的输入端,根据舵轮操纵信号,控制液压舵机的运动。
惯性导航单元通过检测船舶的姿态和运动状态,提供给舵机控制器用于反馈调节。
章节三:船舶舵机控制原理船舶舵机控制的基本原理是将舵轮的操纵信号转换为液压舵机的控制信号,使船舶的转向操作更为精准和灵活。
舵机控制器根据舵轮位置的反馈信号和惯性导航单元提供的船舶姿态信息,实时计算并输出液压舵机控制信号,使舵轮按照预定的角度进行控制。
为了提高舵机控制的稳定性,一般采用PID控制算法,调节液压舵机的输出功率和位置。
章节四:船舶舵机控制的应用和发展前景船舶舵机控制技术在航海领域已经取得了重大的应用成果。
例如,船舶自动驾驶系统中的舵机控制模块,可以根据惯性导航单元的信息和舵轮的操纵信号,实现长时间航行的自动转向操作。
此外,船舶舵机控制技术还可以应用于动力船舶、水下机器人等领域,提高船舶的操纵性和安全性。
随着航海技术的不断发展,船舶舵机控制技术还将得到进一步地改进和应用。
通过以上四个章节的论述,对船舶舵机控制技术进行了全面的介绍和分析,彰显了其在航海领域的重要性和应用前景。
这篇论文可作为该领域研究的基础,并为相关研究和应用提供参考。
章节五:船舶舵机控制系统的性能要求船舶舵机控制系统的性能直接关系到船舶的操纵能力和安全性。
因此,对舵机控制系统的性能要求也非常严格。
首先,船舶舵机控制系统需要具备良好的响应速度和动态性能,能够迅速响应操纵信号,并准确控制舵轮的旋转速度和角度。
link appraisement
刘鑫(1992-)男,民族汉,籍贯天津,职位工程师,学历硕士
研究生,从事飞控系统设计、激光测量技术。
本文针对故障试验中杆力开关故障检测覆盖率低的问题,分析了杆力开关的特性以及生产安装误差对信号采集、余度管理的影响,并通过合理选取离散量监控门限值解决
中国科技信息2019年第8期·CHINA SCIENCE AND TECHNOLOGY INFORMATION Apr .2019
◎航空航天逐一分析。
X1: 电传飞控计算机的离散量采集电路故障,对该微动开关信号采集处理不正确电传飞控系统的飞行前自检测未发现离散量采集电路故障,且在试验器上设置该微动开关的高、低电压状态,计算机均可正确识别。
因此排除X1。
X2:并联舵机杆力开关故障操纵驾驶杆,从试验器上可准确测量到4个微动开关的“通”、“断”状态。
因此排除X2。
X3:电传控制计算机总线故障,对该微动开关信号的传输处理不正确总线监控软件与飞控自检测均未发现总线报故,且其余飞控信号经总线传输正常,因此排除X3。
X4:余度管理软件算法缺陷,未能正确辨识并联舵机杆力开关故障
通过试验器置并联舵机A 微动开关为常闭合状态,然后进行驾驶杆操作。
绝大部分情况下,特别是在慢速大幅值操纵驾驶杆时,飞控系统能够检测到并联舵机A 微动开关与其余3个微动开关状态不同,正常申报故障。
但在迅速小幅操纵驾驶杆时,偶尔不能正确申报出“并联舵机杆力开关故障”。
分别置并联舵机B、C、D 微动开关闭合,重复上述试验,现象相同。
综合以上分析,确定本故障是由于余度管理软件对并联舵机微动开关信号的表决算法存在缺陷引起的。
机理分析
为了保证电传飞控系统四余度信号的完整性,并联舵机
内部设置了四个微动开关,上圆盘内、外侧各叠加安装两个
开关,如图3、图4所示:
由于四个微动开关安装位置差异,难以保证开关的触点
在同一平面内,再考虑到各个微动开关的自身差异性,无法
保证四个微动开关严格同步触发。
指标要求四个微动开关的
最大不一致触发角度不大于0.35°。
正常情况下,余度管理软件对外部输入离散量的监控时
间门限为100ms。
但在前期系统综合试验时,发现在不同
速度、幅值和动杆方式的操纵下,四个微动开关通断的同步
性受动杆幅度的影响较大,快速大幅操纵,同步性较好;但
在慢速小幅下,同步性较差,试验中各微动开关最大时间间
隔达到800ms。
在余度管理软件中,如果四个余度的开关
信号不一致情况超过了一定时间,就将申报该信号故障,从
而出现误报问题。
为避免故障误报,经过大量试验,将此种
信号的判故时间门限放大到了900ms,有效降低了虚警率。
但由此带来了新的问题:当快速动杆操纵时,如果未达到监
控时间门限操纵就结束了,真正的动杆信息不能被识别出来,
不利于系统控制律的处理。
因此出现了杆力开关故障模拟试
验中动杆迅速时故障漏报现象。
改进措施
电传飞控系统对各信号的表决监控原则是不能误报也
不能漏报,受生产安装技术水平所限,微动开关最大不一致触发角度的存在要求控制率在设计时合理选择判故时间门限
值。
对于飞行员是否操纵驾驶杆的判断直接影响控制率解算与模态切换,除了利用并联舵机中的杆力开关进行判断以外,
电传飞控系统还利用了杆位移传感器信号模拟生成了杆力开关信号。
因此,即使并联舵机的杆力开关故障没有及时申报,还有模拟杆力开关信号作为备份信号,短时间的漏报不影响
飞控系统的正常工作。
经过慎重考虑,将余度管理软件对该杆力开关信号的监控时间门限减小为850ms,以实现在避
免误报的情况下,尽可能降低漏报概率。
修改代码后,再次进行故障模拟试验,相同情况下,杆力开关故障,均被飞控
系统迅速、准确申报出来。
总结
进行杆力开关故障试验时,发现动杆迅速情况下有时不能准确报故的根本原因在于并联舵机4 个微动开关无法保证触发的严格同步性,从而造成余度管理软件难以实现在所有状态下,对于微动开关的故障既不误报也不漏报。
修改监控时间门限值后,结合杆位移传感器模拟杆力开关信号,飞控系统对该故障的漏报误报率小于10-6。
本文对杆力开关故障问题建立故障树,明确了故障机理。
对日后并联舵机设计、飞控余度管理有一定的工程借鉴意义。
图3 四路微动开关安装示意图图4 微动开关C、D 实景图。