数控机床的误差补偿
- 格式:doc
- 大小:21.50 KB
- 文档页数:3
《多轴数控机床精度建模与误差补偿方法研究》篇一一、引言随着制造业的快速发展,多轴数控机床作为现代制造技术的重要组成部分,其精度和效率直接影响到产品的质量和生产效率。
因此,对多轴数控机床的精度建模与误差补偿方法进行研究,具有重要的理论价值和实践意义。
本文旨在探讨多轴数控机床的精度建模及误差补偿方法,以期为提高机床的加工精度和稳定性提供理论支持。
二、多轴数控机床精度建模多轴数控机床的精度建模主要包括几何精度建模和运动学精度建模两个方面。
几何精度建模主要关注机床各部件的几何形状、尺寸和相对位置等参数对机床整体精度的影响;运动学精度建模则主要关注机床运动过程中各轴的运动轨迹、速度和加速度等参数对加工精度的影响。
在几何精度建模方面,需要综合考虑机床的机械结构、传动系统、导轨系统等因素,建立准确的数学模型,以便分析各因素对机床精度的影响。
运动学精度建模则需要基于机床的运动学原理,建立各轴的运动方程,分析各轴在运动过程中的动态特性,以及其对加工精度的影响。
三、误差来源及分析多轴数控机床的误差来源主要包括机床本身的制造误差、装配误差、热误差、切削力引起的误差等。
这些误差会导致机床的几何精度和运动学精度下降,从而影响加工质量。
因此,需要对这些误差进行深入分析,找出其主要来源和影响因素。
四、误差补偿方法针对多轴数控机床的误差,可以采取多种补偿方法。
其中,误差预测模型法、神经网络法、模糊控制法等是较为常用的方法。
这些方法可以根据不同的误差来源和影响因素,建立相应的预测模型或补偿算法,对机床的误差进行实时补偿。
具体而言,误差预测模型法可以通过建立机床误差与各影响因素之间的数学模型,预测机床的误差值,并进行实时补偿。
神经网络法则可以利用神经网络的学习和记忆能力,对机床的误差进行学习和预测,并实现自动补偿。
模糊控制法则可以利用模糊控制理论,对机床的误差进行模糊化处理,并实现精确补偿。
五、实验研究为了验证所提出的误差补偿方法的有效性和可行性,需要进行实验研究。
解读数控机床误差补偿关键技术及具体应用
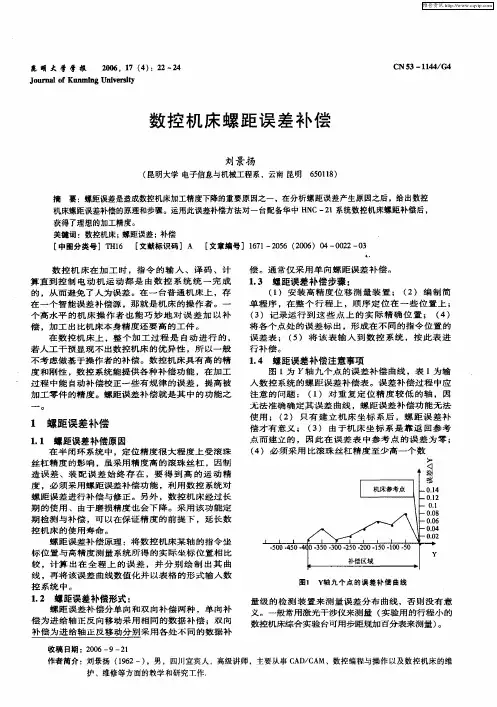
摘要:目前被绝大部分国外产品占领我国中高端数控机床市场,其中国内产品的在高端数控机床市场领域占有率仅为4%左右。
随着对零件加工的精密度要求越来越高的现代制造业不断发展,对高精度的数控机床的需求量将会越来越大,因此对提高我国机床产品的精度意义十分重大。
误差补偿技术是一项具有显著经济价值并十分有效的提高机床精度的手段。
国外的误差补偿技术开展得比较早,取得了不少成绩,但是在国内,误差补偿技术绝大部分还主要停留在实验室范围内,在具体应用中还不普遍。
随着我国国民经济的发展,对数控机床数量和质量的要求也越来越高。
因此,对数控机床补偿技术的研究和应用会更深入和更广泛。
关键词:数控机床;误差补偿;技术应用
1数控机床导轨误差补偿技术
1.1引起导轨导向误差的原因分析
1.1.1导轨的磨损变形
机床在工作过程中,由于导轨受到不规则的磨损变形使得导轨的直线度和扭曲度产生误差,直接影响到导轨的导向精度,从而会影响到零部件的加工精度。
导轨在机床连续的运行中受到持续的承载负荷,导轨的磨损就很难避免,如果是在粗加工的条件之下,导轨的磨损变形更加严重。
而且机床导轨的总长度上因为受到的磨损力不同,使用频率不同,所以在导轨总体上磨损的程度是不均匀的。
1.1.2导轨的热变形。
机械数控机床位置控制及误差补偿分析机械数控机床是一种通过计算机控制来实现加工操作的机床,其位置控制和误差补偿是其关键技术之一。
本文将对机械数控机床位置控制及误差补偿进行分析,并探讨其在机械加工领域的重要性。
一、机械数控机床位置控制原理机械数控机床的位置控制是通过控制机床运动轴的位置来实现加工操作的精准性。
其位置控制原理主要包括运动轴控制系统和位置控制算法两部分。
1. 运动轴控制系统机械数控机床通常包括多个运动轴,如X轴、Y轴、Z轴等。
这些轴通过伺服电机驱动,并通过编码器进行位置反馈。
控制系统通过计算机控制信号来控制伺服电机的转动,从而实现机械数控机床的位置控制。
2. 位置控制算法机械数控机床在实际加工过程中,由于各种因素的影响,存在一定的位置控制误差。
这些误差主要包括静态误差和动态误差两部分。
1. 静态误差静态误差是指机械数控机床在静止状态下的位置误差。
这些误差主要来自伺服电机的非线性特性、传动链路的松动等因素。
静态误差对机械加工精度的影响较为显著,需要通过误差补偿等手段进行校正。
机械数控机床的位置控制误差可以通过多种方法进行补偿,以提高加工精度和效率。
开环误差补偿是通过对机械数控机床运动系统的静态误差和动态误差进行建模和修正来实现。
这种方法通过对系统参数和结构等进行优化,以减小误差对加工精度的影响。
2. 闭环误差补偿3. 多轴联动误差补偿随着机械数控机床技术的不断发展,位置控制误差补偿技术也在不断地更新和完善。
1. 智能化机械数控机床位置控制误差补偿技术将更加智能化,通过对加工工件和环境的实时监测,实现对位置控制误差的实时调整和优化。
2. 多模态补偿3. 高精度化机械数控机床位置控制误差补偿技术将更加高精度化,通过对系统动力学特性和控制算法的深入研究,提高机械数控机床的位置控制精度和稳定性。

数控机床几何误差及其补偿方法汇报人:日期:contents •数控机床几何误差概述•数控机床几何误差检测技术•数控机床几何误差建模与辨识•数控机床几何误差补偿技术•数控机床几何误差补偿实例分析•总结与展望目录01数控机床几何误差概述几何误差的定义与来源机床使用过程中磨损、变形等因素。
制造和装配过程中的精度限制。
机床结构设计缺陷。
定义:几何误差是指数控机床在加工过程中,由于机床本身几何元素的形状、位置和运动误差导致加工精度降低的现象。
来源几何误差对机床加工精度的影响影响加工件的尺寸精度和形状精度。
导致表面质量下降,增加粗糙度。
降低机床的整体性能,缩短使用寿命。
几何误差补偿的意义和必要性必要性现代制造业对加工精度的要求越来越高,几何误差补偿是实现高精度加工的关键手段。
几何误差补偿有助于延长机床使用寿命,提高机床的经济效益。
随着数控机床技术的发展,机床结构越来越复杂,几何误差的影响也越来越显著,需要相应的补偿技术来应对。
意义:通过几何误差补偿,可以提高数控机床的加工精度,保证产品质量,提高生产效率,降低生产成本。
02数控机床几何误差检测技术激光干涉检测技术利用激光的干涉现象进行高精度测量,能够准确地检测数控机床的几何误差。
高精度测量非接触式测量实时动态测量激光干涉检测技术采用非接触式测量方式,避免了传统接触式测量中可能引入的附加误差。
该技术具备实时动态测量能力,能够在数控机床运行过程中进行误差检测,提高检测效率。
03激光干涉检测技术0201球杆仪检测技术经济实用相较于其他高精度检测技术,球杆仪检测技术具有较低的成本,适用于大批量数控机床的误差检测。
便于携带球杆仪体积较小,便于携带,可实现在不同机床间的快速检测。
原理简单球杆仪检测技术基于简单的机械原理,通过测量球杆仪在数控机床上的运动轨迹来推断机床的几何误差。
电容传感检测技术非接触式检测与激光干涉检测技术类似,电容传感检测技术也采用非接触式检测方式,确保测量精度不受附加误差影响。
数控机床误差测量与实时智能补偿关键技术
及应用
随着工程制造业的发展,数控机床逐渐取代了传统的机床,成为
了高效精密加工的主力军。
然而,由于数控机床存在着系统误差、尺
寸误差等问题,导致加工精度不尽如人意。
为了解决这些问题,数控
机床误差测量与实时智能补偿技术应运而生。
数控机床误差测量是指通过对数控机床加工过程中存在的误差进
行精确测量和分析,找出误差的来源及其大小,并将其量化,以便进
一步进行补偿。
通常,数控机床误差可以分为几种类型,如基础误差、运动误差、非线性误差等。
针对不同的误差类型,可以采用不同的测
量方法,如激光干涉、摆角测量、位移传感器等。
数控机床实时智能补偿是指在加工过程中实时检测误差,并通过
计算机智能算法进行补偿,以提高加工精度和加工效率。
实时智能补
偿主要包括两种方法:一种是反馈补偿,即将误差进行反馈并进行补偿;另一种是前馈补偿,即预测误差并在中途进行补偿,以减小实际
误差。
数控机床误差测量与实时智能补偿技术已经得到了广泛的应用,
其主要作用有以下几点:首先,可以提高数控机床的加工精度和加工
效率,从而提高产品的质量;其次,可以减少废品率,降低生产成本;第三,可以提高数控机床的稳定性和可靠性,从而延长设备的使用寿命。
总之,数控机床误差测量与实时智能补偿技术是数控机床加工领
域中的关键技术之一,其应用前景十分广阔。
随着技术的不断发展和
完善,相信它将为工程制造业的发展做出更大的贡献。
浅谈数控机床几何误差的补偿方法【摘要】随着我国经济的快速发展和机床加工技术的迅猛进步,数控机床作为一种加工设备已经应用广泛。
在现有的技术水平上提高机床的加工精度就成了市场竞争的主要方向。
提高数控机床精度的方法一般而言主要有两种:一种是通过提高零件设计制造和零件装配的水平来消除可能产生的误差源,称为误差防止法。
该方法一方面主要受到加工母机精度的制约;另一方面零件质量的提高导致加工成本膨胀,致使该方法的使用受到一定限制。
另一种叫误差补偿法,通常通过修改机床的加工指令,对机床进行误差补偿,达到理想的运动轨迹,实现机床精度的升级。
本文就对对数控机床几何误差产生的原因作了比较详细的分析,将系统误差的补偿方法进行了归纳和总结。
并在此基础上阐述了各类误差补偿方法的应用场合,为进一步实现机床精度的升级打下基础。
【关键词】数控机床;几何误差;误差补偿关于数控机床几何误差的补偿,不但可以改进单个零件的加工精度,加强零件的质量水平,提升企业的市场竞争能力,甚至可以提高整个机械工业的加工水平,对促进科学技术进步,提高我国的科技创新实力,继而极大增强我国的综合国力都具有重大意义。
有关研究表明:几何误差和由温度引起的误差约占机床总体误差的70%,其中几何误差相对较为稳定,易于进行误差补偿。
1 几何误差产生的原因1.1 机床的原始制造误差是指由组成机床各部件工作表面的几何形状、表面质量、相互之间的位置误差所引起的机床运动误差,是数控机床几何误差产生的主要原因。
1.2 机床的控制系统误差包括机床轴系的伺服误差(轮廓跟随误差),数控插补算法误差。
1.3 热变形误差由于机床的内部热源和环境热扰动导致机床的结构热变形而产生的误差。
1.4 切削负荷造成工艺系统变形所导致的误差包括机床、刀具、工件和夹具变形所导致的误差。
这种误差又称为“让刀”,它造成加工零件的形状畸变,尤其当加工薄壁工件或使用细长刀具时,这一误差更为严重。
1.5 机床的振动误差在切削加工时,数控机床由于工艺的柔性和工序的多变,其运行状态有更大的可能性落入不稳定区域,从而激起强烈的颤振。
数控机床空间误差补偿与应用摘要数控机床精度要求的不断提升,逐渐向精密加工发展,因此从对数控机床精度提升角度进行研究,分析了三轴数控机床的各个直线轴误差及三个轴线之间的空间误差关系,对几种误差补偿方法进行综合分析。
从空间误差补偿的角度研究对机床精度的提升,对空间中三个轴线之间的本身误差以及它们之间的误差进行补偿,从空间三维多角度保证机床的精度,同时也是对补偿方法的应用及验证。
关键词:误差;精度;空间误差;误差补偿引言对于数控机床这种基础制造工程技术的发展伴随而来的就是对加工精度要求逐渐由粗加工到精加工再到超精密加工的过程,在这个过程中数控机床的精度发展技术对精密以及超级精密加工尤为重要,通过减少单动环节增加联动过程的误差减小来确保精度的精密程度以及可靠运行的过程。
之所以被称为精密或者超精密加工这都跟工作母机即能达到精细精度的数控机床有着千丝万缕的关系,甚至可以说精密的数控机床决定了加工工件的精密程度等级。
在以往的精密加工过程中往往通过数控机床的装配原件的基准实现,这样的机床生产过程所需时间之长,产量低,从而影响精密技术的发展脚步。
在加工中出现的误差难以避免并消除,通过提升机床装配部件精度的方法不能一直持续进行,因为这种提升程度有限,到一定程度之后就难以进步。
自动化控制技术以及软件技术的飞跃发展,能逐步实现通过微小的进给位移消除在加工过程中产生的误差,从而实现精密加工的保证。
现代的误差补偿技术大多都是随着数控机床的控制系统而进步,不同的数控系统虽然对误差的计算方法及补偿的原理不同,但能实现的效果却是一致的,误差补偿技术的不断持续发展,从多方面补充了因机床元件到达一定程度之后对精度提升没有效果的不足。
做好误差补偿工作对机床精度提升有重要的作用,也是对提升我国工业基础的关键技术,可以减少硬件投入的资金,增强装备制造的能力的重要环节。
1 空间误差分类与定义1.1轴线误差机床X、Y、Z轴运动时,分别产生6项基本误差及三项垂直度误差。
五轴数控机床误差补偿及精度可靠性评估五轴数控机床是一种高精度、高效率的加工设备,广泛应用于航空航天、汽车制造、模具制造等领域。
然而,由于各种因素的影响,五轴数控机床在加工过程中存在一定的误差。
为了提高加工精度和可靠性,需对误差进行补偿并进行评估。
五轴数控机床的误差主要包括几何误差和运动误差。
几何误差是由于机床结构的制造和组装误差、刚性变形等原因引起的,主要包括平行度误差、垂直度误差、位置误差和角度误差等。
运动误差是由于伺服系统、控制系统等原因引起的,主要包括滞后误差、迟滞误差和不平衡误差等。
这些误差会直接影响加工件的精度和表面质量,因此对误差进行补偿和控制是提高加工质量的关键。
误差补偿是通过测量和分析机床误差,通过数学模型将误差量纳入控制系统,使其在加工过程中进行补偿。
首先需要对机床进行检测和测量,获取机床的误差信息。
常用的检测方法包括激光干涉仪、刚度测试仪等。
其次,通过数学建模和仿真,分析机床误差的来源和特性,建立误差补偿模型。
最后,将误差补偿模型嵌入控制系统中,实现误差的实时补偿。
误差评估是对机床的精度和可靠性进行评价和监控。
通过定期对机床进行精度测试和性能测试,可以得到机床的测量数据。
然后,对测试数据进行统计分析和处理,计算出机床的误差指标,并与加工要求进行比较。
例如,常用的误差指标包括定位误差、重复定位误差、轮廓误差等。
对于超出允许范围的误差,需要进行调整和维修,以确保机床的加工精度和可靠性。
同时,还可以采用传感器和监控系统对机床进行实时监测和预警。
通过安装传感器在关键部位,可以实时感知机床的工作状态和性能,监测其误差变化和趋势。
一旦发现异常情况,监控系统可以及时报警,并进行相关维护和处理。
这样可以避免机床在加工过程中出现严重误差,保证加工质量和工作安全。
总结起来,五轴数控机床误差补偿和精度可靠性评估是提高加工质量和效率的重要手段。
通过对机床误差的测量、建模和补偿,以及对机床精度和可靠性的评估和监控,可以实现机床加工精度的提高和工作可靠性的保证。

数控机床误差实时补偿技术及应用数控机床误差实时补偿技术是一种通过测量和监控机床的误差,然后通过算法和控制系统来实时修正这些误差的技术。
它可以显著提高机床的加工精度和稳定性,使得加工的零件更加精确和一致。
下面将介绍数控机床误差实时补偿技术的原理、方法和应用。
数控机床误差实时补偿技术的原理是基于机床的误差源和误差特点进行建模,并通过控制系统实时调整机床的运动轨迹来补偿这些误差。
机床的误差主要包括几何误差、动态误差和热误差等。
几何误差是由机床结构、加工刀具和工件等因素引起的,例如导轨的尺寸偏差、传动装置的误差等。
动态误差是由机床运动过程中的惯性力、弹性变形等因素引起的,例如加工过程中的振动和共振等。
热误差是由于机床在工作过程中产生的热源,例如主轴的热膨胀和冷却液的温度变化等。
数控机床误差实时补偿技术的方法一般包括两个步骤:误差测量和误差补偿。
误差测量是通过传感器或测量仪器实时检测机床的误差,并将其反馈给控制系统。
常用的测量方法包括激光干涉法、电容法和光栅尺等。
误差补偿是在控制系统中根据误差测量结果进行数学建模和分析,并根据补偿算法调整控制指令,使得机床的运动轨迹达到期望的精度。
数控机床误差实时补偿技术在实际应用中具有广泛的应用领域。
首先,它可以应用于航空航天领域的高精度零件加工。
航空航天零件对精度和质量要求非常高,数控机床误差实时补偿技术可以有效提高加工精度,降低零件的尺寸偏差和表面光洁度,从而提高航空航天产品的性能和可靠性。
其次,它可以应用于汽车制造领域的模具加工。
模具制造对精度和一致性要求较高,数控机床误差实时补偿技术可以有效减少模具的尺寸和形状偏差,提高模具的加工质量和寿命。
此外,它还可以应用于医疗器械制造、光学仪器加工等领域。
总之,数控机床误差实时补偿技术是一种通过测量和监控机床的误差,并通过控制系统实时调整机床运动轨迹的技术。
它可以显著提高机床的加工精度和稳定性,广泛应用于航空航天、汽车制造、医疗器械等领域,为实现高精度和高质量的零件加工提供了重要的技术手段。
摘要加工精度是机床最重要的性能指标之一。
本课题运用多体系统运动学为核心的误差分析理论体系,对三轴数控机床精度问题进行了系统、全面的分析,并重点在数控机床误差测量、误差分析建模、误差辨识以及误差补偿等方面的研究,通过建立误差模型,得出误差在刀具运动过程中的传递规律,给出了过程,为了提高加工精度,从而对机床进行了软件误差补偿。
本文主要从以下几个方面的内容进行了研究和探讨:(1) 研究了机床的精度分析的基本理论,对多体系统运动学以及基于该理论的机床误差建模、误差辨识及误差补偿的方法作了科学性的研究。
数控机床误差参数的正确辨识是数控机床补偿的必要前提条件。
(2) 详细分析了三坐标9线误差分析方法,以沿X向运动为例,算得六项误差参数,为例,具体给出其计算继而同理可以推算出沿Y向和Z向的十二项误差参数,之后又以xy方法,同理可推算出其余两项垂直度误差。
由此得到21项误差,并以X向为例,做实验,将测得值和计算的两个误差进行比较,发现误差相差比较小。
(3) 详细阐述了软件补偿数控指令的修正算法,再根据此建立了软件补偿系统,分别对软件系统的软硬件流程进行详细阐述,最后通过此项技术的误差补偿,数控机床的各项误差都有所降低,达到了本课题提高机床加工精度的目的。
但是本课题的成果尚未应用到生产实际中,在今后的研究中,还要进行大量的实验去获取大量的实际数据,为今后该方法的实际应用奠定基础。
关键词:数控机床;几何误差;多体系统;误差补偿AbstractThe machining accuracy is one of the most important performance indexes for machinetools.Theoretical analysis of system error based on the kinematics of multi-body system as the core, the three axis CNC machine tool accuracy problem analyzed system, comprehensive, and focus on the NC machine tool error measurement, error analysis, error identification and the error compensation model etc., by establishing the error model, transfer of error in the tool motion process in conclusion, given the process, in order to improve the machining precision, thus the software error compensation of machine tools. The following issues are mainly studied and addressed in this thesis:(1) Research on the basic theory analysis of the accuracy of machine tools, the kinematics of multi-body system and method of the theory of the machine tool error modeling, error identification and the error compensation based on the scientific study. Correctly identifying the geometric error parameters is a necessary prerequisite for compensation of NC machine.(2) After establishing the precision model of machine tools,the measurement and evaluation of their error parameters have been started.There are many kinds of error parameters in the machine tool to influence its machining accuracy.The recognized strategies of error measurements and evaluations for machine tools are introduced.After that,this paper has detailed a new method defined as twelve—line method for the sake of making the most of double.frequency laser interferometers to measure and evaluate 21 geometric errors of three-axis system.Based on these researches,the problems of the error measurement and evaluation of machine tools in the application process of MBS theories are resolved perfectly.(3) This paper put forward index systems of machining contour errors,through error compensation of this technology, the NC machine tool error are reduced, reaches the aim of improving the machining accuracy of machine tools. But the result has not been applied to the actual production, in future research, but also a large number of experiments to obtain a large number of actual data, and lay the foundation for the future application of the method.Key words:machine center; geometric error; multi-body system; error compensation目录摘要 (I)ABSTRACT (II)目录 (V)1 绪论 (1)1.1数控机床加工误差补偿技术的研究内容和意义 (1)1.2国内外的发展概况及分析 (1)1.3误差补偿技术研究应达到的要求 (1)1.3.1 研究的指导思想 (1)1.3.2 应要达到的要求 (2)2 数控机床的主要误差来源及补偿方法的研究 (3)2.1数控机床的误差来源及分类 (3)2.1.1 数控机床的误差产生的原因及分析 (3)2.1.2 数控机床的误差分类 (3)2.1.3 数控机床的误差补偿技术研究 (4)2.2基于多体系统理论的几何误差模型 (4)2.2.1多体系统拓扑结构的描述 (4)2.2.2 实际情况下多体系统的位置关系 (5)2.3误差分析及参数辨识 (7)2.3.1 三坐标误差分析 (7)2.3.2 数控机床误差补偿的误差参数辨识 (7)2.3.3 误差补偿的实验与结论 (9)2.5本章小结 (10)3数控机床加工误差补偿系统 (11)3.1几何误差软件补偿法选择与分析 (11)3.1.1 误差补偿方法的分类与选择 (11)3.1.2 软件补偿数控指令修正算法 (11)3.2误差补偿系统的硬件设计分析 (14)3.2.1 软件补偿数控指令修正算法 (14)3.2误差补偿系统的软件设计分析 (15)3.3本章小结 (19)4 数控机床加工的误差补偿及仿真验证 (20)4.1误差补偿系统的软件补偿实验 (20)V4.1.1 数控机床类型及约束参数的设定 (20)4.1.2 机床误差参数辨识模块 (21)4.1.3 共建位置及刀具参数输入 (22)4.2数控机床误差补偿软件的仿真验证 (23)4.2.1 针对X向测出的误差前后数据记录 (24)4.2.2 三坐标轴上误差补偿前后误差值的分析 (25)4.3本章小结 (27)5 结论 (28)5.1全文总结 (28)5.2存在的问题及分析 (28)5.3数控机床加工误差补偿技术的展望 (28)致谢 (29)参考文献 (30)附录 (31)数控机床加工误差补偿技术的研究1 绪论1.1 数控机床加工误差补偿技术的研究内容和意义在现今高科技环境下, 制造领域正向高精度、高质量、高集成度和智能化方向发展,人们对机械产品的精度和质量要求越来越高,要求必须采用高精密制造加工技术,而作为制造加工的主要设备数控机床的精度技术,已成为提高制造水平和国际竞争力的关键技术[1]。
数控机床的误差补偿随着我国经济的飞速发展,数控机床作为新一代工作母机,在机械制造中已得到广泛的应用,精密加工技术的迅速发展与零件加工精度的不断提高,对数控机床的精度也提出了更高的要求。
尽管用户在选购数控机床时,都十分看重机床的位置精度,特别是各轴的定位精度与重复定位精度。
但是这些使用中的数控机床精度到底如何呢? 大量统计资料表明:65.7%以上的新机床,安装时都不符合其技术指标;90%使用中的数控机床处于失准工作状态。
因此,对机床工作状态进行监控与对机床精度进行经常的测试是非常必要的,以便及时发现与解决问题,提高零件加工精度。
目前数控机床位置精度的检验通常采用国际标准ISO230-2或国家标准GB10931-89等。
同一台机床,由于采用的标准不同,所得到的位置精度也不相同,因此在选择数控机床的精度指标时,也要注意它所采用的标准。
数控机床的位置标准通常指各数控轴的反向偏差与定位精度。
对于这二者的测定与补偿是提高加工精度的必要途径。
一、反向偏差在数控机床上,由于各坐标轴进给传动链上驱动部件(如伺服电动机、伺服液压马达与步进电动机等)的反向死区、各机械运动传动副的反向间隙等误差的存在,造成各坐标轴在由正向运动转为反向运动时形成反向偏差,通常也称反向间隙或失动量。
对于采用半闭环伺服系统的数控机床, 反向偏差的存在就会影响到机床的定位精度与重复定位精度, 从而影响产品的加工精度。
如在G01切削运动时, 反向偏差会影响插补运动的精度, 若偏差过大就会造成“圆不够圆,方不够方”的情形;而在G00快速定位运动中,反向偏差影响机床的定位精度,使得钻孔、镗孔等孔加工时各孔间的位置精度降低。
同时,随着设备投入运行时间的增长, 反向偏差还会随因磨损造成运动副间隙的逐渐增大而增加, 因此需要定期对机床各坐标轴的反向偏差进行测定与补偿。
(1)反向偏差的测定反向偏差的测定方法:在所测量坐标轴的行程内, 预先向正向或反向移动一个距离并以此停止位置为基准,再在同一方向给予一定移动指令值,使之移动一段距离,然后再往相反方向移动相同的距离,测量停止位置与基准位置之差,在靠近行程的中点及两端的三个位置分别进行多次测定(一般为七次),求出各个位置上的平均值, 以所得平均值中的最大值为反向偏差测量值。
数控机床的误差补偿技术研究摘要:随着科学技术的不断发展,高集成、高质量、高精度已经成为了未来机械行业主要的发展方向,在进行数控机床加工的过程中,加工精度正逐渐成为对国际竞争力和制作水平进行提高的主要技术,为了对我国制作生产的竞争力进行提高,需要对数控机床的加工精度进行提升,其中误差补偿技术就是一种对加工精度进行提升的主要方法。
本文根据国内外对误差补偿的研究情况,对误差补偿过程中主要技术存在的相关问题进行探讨。
关键词:数控机床;误差;补偿1.数控机床中的误差补偿关键技术数控机床误差补偿的主要技术数控机床的误差补偿是对加工精度进行提高的主要措施,进行误差补偿时,主要会使用到补偿实施技术、测量技术、建模技术。
1.1补偿实施技术进行误差测量和建模主要是为了进行误差补偿,在实际补偿的过程中,可以分为离线补偿和实时补偿两个方面,其中离线补偿指的是按照具体测量到的误差对数控加工工序进行调整,使数控机床根据新的加工工序进行误差补偿。
1.2测量技术测量技术主要是为了确定机床的原始误差参数,在进行直接误差测量时,主要使用激光干涉仪器、机械干涉仪器等对不同温度、不同位置机床的误差进行测量,虽然对误差进行直接测量,精确度高,但是比较费工,工作效率低,因此,多用来对单项误差进行测量,间接误差主要是用来对误差相关指标进行测量,然后使用误差模型转换成技术误差。
使用此方法进行测量,效率比较高,多用来测量综合误差。
1.3误差建模误差建模主要由误差元素建模和误差综合建模构成,其中,综合误差建模是根据加工过程中刀具和工件之间的相对位移表示运动模型,误差建模是用来对更加有效的模型进行寻找,将机床存在的误差准确的反映出来。
2.误差补偿关键技术的步骤数控机床操作中误差补偿关键技术的执行,必须遵循操作流程,体现补偿技术的优质性,排除不良因素影响。
第一,检测发生误差的关键点,分析引发误差的原因。
明确各个误差间的关系,通过热变形思想,得出控制点,利用控制点补偿数控机床操作中的误差点,迅速补偿给误差模型,便于及时处理机床制造的误差。
五轴数控加工中的误差补偿算法研究五轴数控加工是现代制造业中的一项重要技术,在如此精密的工艺中,准确控制加工机床的误差十分关键。
然而,在加工过程中,由于各种原因,加工质量往往无法完全满足设计要求。
因此,在五轴数控加工加工中采用误差补偿算法是一种有效手段。
误差来源在五轴数控加工中,误差来源主要有机械误差、热变形误差、刀具磨损、零件安装姿态变化等因素。
这些误差会导致实际工件与模型之间存在差异,最终影响工件的加工精度。
误差补偿算法误差补偿算法是通过对加工系统进行监控和检测,从而获得机床的误差信息,然后根据误差信息对加工轨迹进行调整,修正零件形状和大小的方法。
根据补偿方式不同,常用的误差补偿算法主要有后补偿算法和前补偿算法。
后补偿算法是在加工完成后对实际加工数据进行纠正,以达到准确的加工目的。
而前补偿算法则是在加工前预先计算好修正量,通过对加工程序进行修改实现自动补偿。
常用的误差补偿算法1. 工具中心点补偿(TCP补偿)工具中心点补偿是一种常见且简单易行的误差补偿方法,其原理为通过调整工具刀具轴与工件表面的距离,以实现工件表面精度的提高。
该方法适用于直线轨迹或二次曲线轨迹的加工,精度达到0.01mm,但是该方法只能对加工尺寸进行粗略调整而无法精细修正。
2. 堆积误差补偿堆积误差补偿方法是指通过计算加工误差累积值来进行补偿,该方法适用于复杂曲面的加工,可达到较高的加工精度。
其流程为:先测量出第一次加工后工件的实际位置与理论位置之间的差异,然后通过相应的算法来修正加工轨迹,以修正误差造成的影响。
3. 动态误差补偿(DEC)动态误差补偿是一种基于数控系统连续迭代优化技术的方法,该方法能够实现在线误差监测、实时补偿,提高加工装备的定位精度。
总结五轴数控加工误差补偿算法的研究是现代制造业发展的重要方向。
当前,随着加工精度要求的不断提高,各种误差补偿算法也不断得到改进和创新。
未来,应继续开展相关研究,将研究成果真正应用于实际生产中,为提高五轴数控加工质量和效率做出更大的贡献。
数控机床的误差补偿
随着我国经济的飞速发展,数控机床作为新一代工作母机,在机械制造中已得到广泛的应用,精密加工技术的迅速发展和零件加工精度的不断提高,对数控机床的精度也提出了更高的要求。
尽管用户在选购数控机床时,都十分看重机床的位置精度,特别是各轴的定位精度和重复定位精度。
但是这些使用中的数控机床精度到底如何呢? 大量统计资料表明:65.7%以上的新机床,安装时都不符合其技术指标;90%使用中的数控机床处于失准工作状态。
因此,对机床工作状态进行监控和对机床精度进行经常的测试是非常必要的,以便及时发现和解决问题,提高零件加工精度。
目前数控机床位置精度的检验通常采用国际标准ISO230-2或国家标准GB10931-89等。
同一台机床,由于采用的标准不同,所得到的位置精度也不相同,因此在选择数控机床的精度指标时,也要注意它所采用的标准。
数控机床的位置标准通常指各数控轴的反向偏差和定位精度。
对于这二者的测定和补偿是提高加工精度的必要途径。
一、反向偏差
在数控机床上,由于各坐标轴进给传动链上驱动部件(如伺服电动机、伺服液压马达和步进电动机等)的反向死区、各机械运动传动副的反向间隙等误差的存在,造成各坐标轴在由正向运动转为反向运动时形成反向偏差,通常也称反向间隙或失动量。
对于采用半闭环伺服系统的数控机床, 反向偏差的存在就会影响到机床的定位精度和重复定位精度, 从而影响产品的加工精度。
如在G01切削运动时, 反向偏差会影响插补运动的精度, 若偏差过大就会造成“圆不够圆,方不够方”的情形;而在G00快速定位运动中,反向偏差影响机床的定位精度,使得钻孔、镗孔等孔加工时各孔间的位置精度降低。
同时,随着设备投入运行时间的增长, 反向偏差还会随因磨损造成运动副间隙的逐渐增大而增加, 因此需要定期对机床各坐标轴的反向偏差进行测定和补偿。
(1)反向偏差的测定
反向偏差的测定方法:在所测量坐标轴的行程内, 预先向正向或反向移动一个距离并以此停止位置为基准,再在同一方向给予一定移动指令值,使之移动一段距离,然后再往相反方向移动相同的距离,测量停止位置与基准位置之差,在靠近行程的中点及两端的三个位置分别进行多次测定(一般为七次),求出各个位置上的平均值, 以所得平均值中的最大值为反向偏差测量值。
在测量时一定要先移动一段距离AB段, 否则不能得到正确的反向偏差值。
测量直线运动轴的反向偏差时,测量工具通常采有千分表或百分表,若条件允许,可使用双频激光干涉仪进行测量。
当采用千分表或百分表进行测量时,需要注意的是表座和表杆不要伸出过高过长,因为测量时由于悬臂较长,表座易受力移动,造成计数不准,补偿值也就不真实了。
若采用编程法实现测量,则能使测量过程变得更便捷更精确。
例如,在三坐标卧式机床上测量X轴的反向偏差,可先将表压住主轴的圆柱表面,然后运行如下程序进行测量:
N10 G91 G01 X50 F1000;工作台右移
N20 X-50;工作台左移,消除传动间隙
N30 G04 X5;暂停以便观察
N40 Z50;Z轴抬高让开
N50 X-50:工作台左移
N60 X50:工作台右移复位
N70 Z-50:Z轴复位
N80 G04 X5:暂停以便观察
N90 M99;
需要注意的是,在工作台不同的运行速度下所测出的结果会有所不同。
一般情况下,低速的测出值要比高速的大, 特别是在机床轴负荷和运动阻力较大时。
低速运动时工作台运动速度较低,不易发生过冲超程(相对“反向间隙”),因此测出值较大;在高速时,由于工作台速度较高,容易发生过冲超程,测得值偏小。
回转运动轴反向偏差量的测量方法与直线轴相同,只是用于检测的仪器不同而已。
(2)反向偏差的补偿
国产数控机床, 定位精度有不少>0.02mm,但没有补偿功能。
对这类机床,在某些场合下,可用编程法实现单向定位,清除反向间隙,在机械部分不变的情况下,只要低速单向定位到达插补起始点,然后再开始插补加工。
插补进给中遇反向时, 给反向间隙值再正式插补, 即可提高插补加工的精度,基本上可以保证零件的公差要求。
对于其他类别的数控机床,通常数控装置内存中设有若干个地址,专供存储各轴的反向间隙值。
当机床的某个轴被指令改变运动方向时,数控装置会自动读取该轴的反向间隙值,对坐标位移指令值进行补偿、修正,使机床准确地定位在指令位置上,消除或减小反向偏差对机床精度的不利影响。
一般数控系统只有单一的反向间隙补偿值可供使用,为了兼顾高、低速的运动精度,除了要在机械上做得更好以外,只能将在快速运动时测得的反向偏差值作为补偿值输入,因此难以做到平衡、兼顾快速定位精度和切削时的插补精度。
对于FANUC0i、FANUC18i等数控系统,有用于快速运动(G00)和低速切削进给运动(G01)的两种反向间隙补偿可供选用。
根据进给方式的不同,数控系统自动选择使用不同的补偿值,完成较高精度的加工。
将G01切削进给运动测得的反向间隙值A 输入参数NO11851(G01的测试速度可根据常用的切削进给速度及机床特性来决定),将G00测得的反向间隙值B 输入参数NO11852。
需要注意的是,若要数控系统执行分别指定的反向间隙补偿,应将参数号码1800的第四位(RBK)设定为1;若RBK设定为0,则不执行分别指定的反向间隙补偿。
G02、G03、JOG与G01使用相同的补偿值。
二、定位精度
数控机床的定位精度是指所测量的机床运动部件在数控系统控制下运动所能达到的位置精度,是数控机床有别于普通机床的一项重要精度,它与机床的几何精度共同对机床切削精度产生重要的影响,尤其对孔隙加工中的孔距误差具有决定性的影响。
一台数控机床可以从它所能达到的定位精度判出它的加工精度,所以对数控机床的定位精度进行检测和补偿是保证加工质量的必要途径。
(1)定位精度的测定
目前多采用双频激光干涉仪对机床检测和处理分析,利用激光干涉测量原理,以激光实时波长为测量基准,所以提高了测试精度及增强了适用范围。
检测方法如下:
①安装双频激光干涉仪;
②在需要测量的机床坐标轴方向上安装光学测量装置;
③调整激光头,使测量轴线与机床移动轴线共线或平行,即将光路预调准直;
④待激光预热后输入测量参数;
⑤按规定的测量程序运动机床进行测量;
⑥数据处理及结果输出。
(2)定位精度的补偿
若测得数控机床的定位误差超出误差允许范围,则必须对机床进行误差补偿。
常用方法是计算出螺距误差补偿表,手动输入机床CNC系统,从而消除定位误差,由于数控机床三轴或四轴补偿点可能有几百上千点,所以手动补偿需要花费较多时间,并且容易出错。
现在通过RS232接口将计算机与机床CNC控制器联接起来,用VB编写的自动校准软件控制激光干涉仪与数控机床同步工作,实现对数控机床定位精度的自动检测及自动螺距误差补偿,其补偿方法如下:
①备份CNC 控制系统中的已有补偿参数;
②由计算机产生进行逐点定位精度测量的机床CNC程序,并传送给CNC 系统;
③自动测量各点的定位误差;
④根据指定的补偿点产生一组新的补偿参数,并传送给CNC系统,螺距自动补偿完成;
⑤重复③进行精度验证。
根据数控机床各轴的精度状况,利用螺距误差自动补偿功能和反向间隙补偿功能,合理地选择分配各轴补偿点,使数控机床达到最佳精度状态,并大大提高了检测机床定位精度的效率。
定位精度是数控机床的一个重要指标。
尽管在用户购选时可以尽量挑选精度高误差小的机床,但是随着设备投入使用时间越长,设备磨损越厉害,造成机床的定位误差越来越大,这对加工和生产的零件有着致命的影响。
采用以上方法对机床各坐标轴的反向偏差、定位精度进行准确测量和补偿, 可以很好地减小或消除反向偏差对机床精度的不利影响,提高机床的定位精度,使机床处于最佳精度状态, 从而保证零件的加工质量。