机械原理讲义12
- 格式:pdf
- 大小:2.22 MB
- 文档页数:50

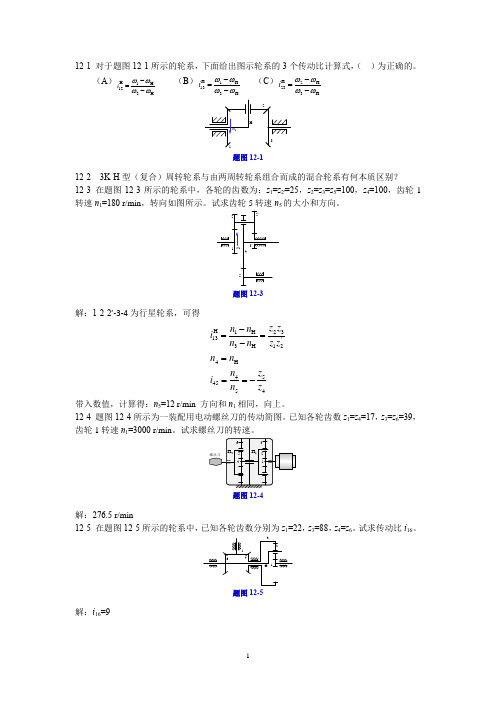
12-1 对于题图12-1所示的轮系,下面给出图示轮系的3个传动比计算式,( )为正确的。
(A )H 1H 122H i ωωωω-=-(B )H 1H 133H i ωωωω-=-(C )H 2H 233H i ωωωω-=-题图12-112-2 3K-H 型(复合)周转轮系与由两周转轮系组合而成的混合轮系有何本质区别?12-3 在题图12-3所示的轮系中,各轮的齿数为:z 1=z 2'=25,z 2=z 3=z 5=100,z 4=100,齿轮1转速n 1=180 r/min ,转向如图所示。
试求齿轮5转速n的大小和方向。
题图12-3解:1-2-2’-3-4为行星轮系,可得H 231H 13'3H 124H 544554z z n n i n n z z n n z n i n z -==-===-带入数值,计算得:n 5=12 r/min 方向和n 1相同,向上。
12-4 题图12-4所示为一装配用电动螺丝刀的传动简图。
已知各轮齿数z 1=z 4=17,z 3=z 6=39,齿轮1转速n 1=3000 r/min 。
试求螺丝刀的转速。
题图12-4解:276.5 r/min12-5 在题图12-5所示的轮系中,已知各轮齿数分别为z 1=22,z 3=88,z 4=z 6。
试求传动比i 16。
题图12-5解:i 16=912-6在题图12-6所示的轮系中,已知各轮齿数z1 =40,z2=z3=100,z4=z5=30,z6=20,z7=80,齿轮1转速n A=1000r/min,方向如图。
试求n B大小及方向。
解:n B=240 r/min 方向向上12-7 下题图12-7所示的轮系中,已知各齿轮的齿数分别为:z1 =80,z2=60,z2'=20,z3=40,z3'=20,z4= 30,z5=80。
轴A和轴B的转速分别为n A=50r/min,n B=60r/min,方向如图所示。

目 录考研分析1第一章 绪论7 第1讲 机械原理概述7第二章 机构的结构分析9 第1讲 运动副及自由度计算初步9 第2讲 计算平面机构自由度时应注意的事项13 第3讲 机构运动简图与平面机构组成17第三章 平面机构的运动分析21 第1讲 速度瞬心法21 第2讲 矢量方程图解法及综合法25 第3讲 矢量方程图解法中需说明的问题28第四章 平面机构的力分析33 第1讲 构件惯性力以及运动副中总反力33 第2讲 考虑摩擦时机构受力分析39第五章 机械的效率和自锁43第六章 机械的平衡48第七章 机械的运转及其速度波动的调节53第八章 平面连杆机构及其设计59 第1讲 平面连杆机构基础知识60 第2讲 平面连杆机构的设计(一)65 第3讲 平面连杆机构的设计(二)68第九章 凸轮机构及其设计73 第1讲 从动件运动规律及凸轮机构设计73 第2讲 凸轮机构设计中几个问题78第十章 齿轮机构及其设计84 第1讲 齿轮相关定理等理论知识点85 第2讲 齿轮相关定理等理论知识点习题专练89 第3讲 齿轮的切制与变位修正91 第4讲 齿轮参数计算95第十一章 齿轮系及其设计101第十二章 其他常用机构107考研分析教材说明 《机械原理》作 者:孙桓,陈作模,葛文杰出版社:高等教育出版社版 次:第七版其他参考书目:书名出版社作者机械原理教程清华大学出版社申永胜机械原理华中科技大学出版社杨家军主编机械原理高等教育出版社邹慧君张春林机械原理高等教育出版社王知行刘廷荣机械原理高等教育出版社郑文纬吴克坚机械原理国防工业出版社安子君机械设计基础高等教育出版社杨可桢试卷分析1.考试形式:①单考机械原理:以大题为主②机械原理+机械设计合考时:机械原理部分在填空题、选择题、计算题、作图题方面分值分布较为均匀。
侧重于基础知识点及对知识点灵活运用的考核2.考试题型及分值分布:题型单考机械原理时分值分布机械原理+机械设计时机械原理部分分值分布选择题35分左右15~20分左右填空题判断题问答题20分左右10分左右计算题50分左右20分左右作图题30分左右20分左右设计综合分析题15分左右与机械设计结构分析交叉出题3.考试内容及分值分布:章节重点难点必考点考试题型分值1绪论填空选择2机构的结构分析√√√计算填空选择问答15~253平面机构的运动分析√√√作图填空10~204平面机构的力分析√√√作图填空10~205机械的效率和自锁√√计算填空10~156机械的平衡√计算选择10~157机械的运转及其速度波动的调节√计算填空选择问答10~208平面连杆机构及其设计√√√作图计算问答15~309凸轮机构及其设计√√作图填空10~1510齿轮机构及其设计√√计算填空选择15~2011齿轮系及其设计√√√计算15~2012其他常用机构√填空选择设计104.考试题型及题型考核点分析题型考核点涉及章节备注计算题自由度计算2-2,2-6注意与轮系等组合机构的自由度计算机械效率5-1,4-3,4-4机械自锁条件5-2注意与第四章联合出题刚性转子平衡条件6-2飞轮转动惯量计算7-4等效转动惯量计算7-2,2-3齿轮机构参数计算轮系传动比计算10-4,10-5,10-8,10-9,10-10,11-2,11-3,11-4,11-7与《机械设计》中齿轮受力分析联合出题作图题瞬心法作机构速度分析矢量方程图解法作机构速度和加速度分析3-2,3-2,3-4注意综合法的运用运动副中摩擦力和支反力的分析4-3,4-4平面四杆机构的作图法设计8-4直动从动件凸轮机构轮廓曲线的设计9-3,9-4齿轮机构啮合区域作图10-5设计分析综合题机构设计方案的合理性2-3,2-41.自由度是否为零2.虚约束设计是否合理机构级别的确定2-71.机构拆分2.机构综合续表题型考核点涉及章节备注设计分析综合题用间歇机构、常用机构组合进行方案设计8-1,8-2,8-3,12-1,12-2,12-3,12-5,12-8,12-9,12-101.熟练掌握各种机构运动特点,注意四杆机构各种变形。



机械原理讲义全套机械原理是机械工程专业的一门基础课程,它主要研究物体在力的作用下所表现出的相互作用、运动和结构行为。
本文将为大家提供一套机械原理讲义,帮助大家更好地理解和掌握这门课程。
第一章:机械原理的概述1.1机械原理的定义和作用1.2机械原理的研究内容1.3机械原理的研究方法1.4机械原理的发展和应用第二章:受力分析2.1力的概念和表示方法2.2力的合成和分解2.3力的平衡与条件2.4力的作用点和作用线第三章:刚体力学3.1刚体的定义和性质3.2刚体平衡的条件3.3刚体平衡的实例分析3.4刚体平衡的应用第四章:运动学基础4.1机械原理中的运动学概念4.2匀速直线运动和曲线运动4.3加速度和速度与位移的关系4.4运动学中的一些常用公式第五章:动力学基础5.1动量和动量守恒定律5.2力的大小和方向与加速度的关系5.3动力学中的一些常用公式5.4动力学中的实例分析第六章:动力学应用6.1动力学中的斜面问题6.2动力学中的弹簧问题6.3绳索和滑轮在动力学中的应用6.4动力学中的摩擦力分析第七章:静力学应用7.1静力学中的平衡问题7.2静力学中的力矩和杠杆7.3静力学中的悬挂问题7.4静力学中的摩擦力分析第八章:激光原理8.1激光的定义和性质8.2激光的产生和传播8.3激光的应用第九章:机械传动原理9.1机械传动的概念和分类9.2齿轮传动的原理和计算9.3带传动的原理和计算9.4万向节传动的原理和计算第十章:机械结构原理10.1机械结构的定义和分类10.2机械结构的设计原则10.3机械结构的应用和发展趋势10.4机械结构中常见问题的解决方法这套机械原理讲义全面而详细地介绍了机械原理的各个方面,帮助学生建立起对机械原理的理论框架和实践应用。
通过学习这套讲义,学生能够更好地理解机械原理的概念、原理和应用,提高解决实际问题的能力。
希望这套讲义能够对大家学习机械原理有所帮助。
摩擦的作用:
有害:效率降低、磨损.
有利:联结、带传动、制动器
Friction in the Machinery and Mechanical Efficiency
摩擦应用
带传动
摩擦应用
摩擦轮传动
摩擦应用
摩擦轮传动—
端面无级变速器
r
R n n i 2112==
摩擦应用
摩擦轮传动—无级变速器
摩擦应用摩擦离合器
单片式离合器多片式离合器
摩擦应用
制动器
研究内容:
运动副的摩擦
考虑摩擦时机构总反力方向确定
机械效率的确定
机械的自锁
移动副的摩擦
摩擦力的确定F 21= f · N 21 = f · Q
1.
平面摩擦
总反力的方向总反力R 21与相对速度V 12间的夹角总是(90°+ ϕ)
21
2121F N R +=f N N f N F tg 21212121=⋅==ϕf arctan =ϕ摩擦角ϕtan Q P
=
滑块匀速上升
(正行程)
R Q P =++)
tan(Q P ϕ+λ=2.
斜面摩擦
滑块匀速下滑(反行程)
+
P=
+′
R
Q
λ
−
=′
tan(
)
Q
Pϕ
)
tan(Q P ϕ−λ=′)
tan(Q P ϕ+λ=ϕ
tan Q P
=
3. 槽面摩擦
θsin 221∗=Q N Q f N f F ∗=∗∗=θ
sin 22121工程问题解决方法——当量摩擦系数
工程问题解决方法——当量摩擦系数
θ=sin f f e Q f F e
=f
f e =本质是什么?摩擦系数增大?
正压力增大
!
思考:槽斜
面?)
tan(Q P ϕ+λ=θ
ϕλsin /)tan(+=Q P θ
=sin f
f e
思考:螺旋副?
矩形螺纹三角形螺纹
机械原理
研究方法:空间运动副问题转化为平面运动副问题螺旋副
斜面移动副
(1)螺杆与螺母之间的作用力集中在中径为d 的圆柱面上。
(2)螺杆与螺母之间的作用力集中在一段螺纹上。
假设l 螺纹导程
z 螺纹头数
p 螺距
L=z*p
)
tan(Q P ϕ+λ=螺杆逆Q 力等速向上运动
d
d tan π=π=λ)
tan(Q 2d
2d
P M ϕ+λ⋅⋅=⋅=
)
tan(Q 2d
2d
P M ϕ−λ⋅⋅=⋅=)
tan(Q P ϕ−λ=螺杆顺Q 力等速向下运动
d
zp
d l tan π=π=
λ
三角螺纹
e
e f arctan =ϕ)tan(Q 2
d 2
d P M
e ϕ+λ⋅⋅=⋅=)tan(Q 2d 2d P M e ϕ−λ⋅⋅=⋅′=′θsin
f f e =槽面β=β−=cos f )90sin(f f e o
转动副的摩擦
径向轴颈与轴承止推轴颈与轴承
轴颈与轴承运动情况
Q
f F e ⋅=e
f f r r M ⋅⋅⋅⋅≈R t
g R =φρ
⋅−=R M d Q R −=平衡
条件ρ
⋅=ρ⋅=Q R M f r f e ⋅=ρφ
ρsin R R ⋅⋅=⋅=r M
f
r
f e ⋅=ρ摩擦圆
结论:转动副总反力确定方法
1. 轴承对轴颈的总反力R 将始终切于摩擦圆;
2. 总反力对轴颈轴心O 之矩的方向必与轴颈相对于轴承的角速度的方向相反;
3. 具体方向由构件平衡条件确定。
思考?
R
结论:转动副总反力确定方法
1. 轴承对轴颈的总反力R将始终切于摩擦圆;
2. 总反力对轴颈轴心O之矩的方向必与轴颈
相对于轴承的角速度的方向相反;
3. 具体方向由构件平衡条件确定。
小结:
滑块1所受的总反力R 21与其对平面2的相对速度V 12间的夹角总是(90°+ ϕ)
轴承对轴颈的总反力R 将始终切于摩擦圆;
总反力对轴颈轴心O 之矩的方向必与轴颈相对于轴承的角速度的方向相反;
具体方向由构件平衡条件确定。
工程问题解决方法——当量摩擦系数
例1:图示曲柄滑块机构中,已知各构件的尺寸,各转动副的
,半径及其相应的摩擦系数。
在曲柄AB上作用有驱动力矩M
1滑块上作用有工作阻力P。
在不计各构件质量的情况下,
确定机构在图示位置各运动副中总反力作用线的位置。
(1)分析受力简单的连杆受力情况
初定反力方向;切于摩擦圆;
构件i 给连杆的总反力R
i2 对回转中心的力矩
方向与连杆对构件相对角速度方向ω
2i 相反;
连杆所受外力平衡.
(2)分析滑块的受力情况
P R R 4323=++
(3)分析曲柄的受力情况
思考:连杆机构受力分析
例2:凸轮机构受力分析
作用在机械上的力所作的功分为以下三类:
输入功W d :驱动力所作之功,相应的功率表示为N d 。
输出功Wr :工作阻力所作之功,相应的功率表示为Nr 。
损耗功W f :有害阻力所作之功,相应的功率表示为N f 。
机械在稳定运转时,一个运动循环内:
W d = W r + W f
机械效率:在一个运动循环内,输出功与输入功的比值。
它表示机械对能量的有效利用程度
d
f d r W W 1W W −==ηd
f d r P P 1P P −==η
P
Q d r Pv Qv N N ==η理想机械:假设机械中不存在摩擦。
理想驱动力P o :理想机械克服同样生产阻力所需的驱动力。
1v P Qv P 0Q
o ==ηP 0Q v P Qv =效率的力(力矩)表达
P Q d r Pv Qv N N ==η机械效率等于在克服同样生产阻力(矩)Q 的情况下,理想驱动力(矩)P o 与实际驱动力(矩)P 之比值
P
P 0=ηP
P Pv v P o P P o =
=
理想阻力矩Q 0:
同样驱动力下,理想
机械所能克服的生产阻力。
0d r Q Q N N ==η0
Q Q d r M M N N ==η机械效率等于在同样驱动力情况下,机械所能克服的实际阻力(矩)与理想阻力(矩)之比。
机械效率的求法:
计算法
实验法
经验法
机械系统效率的求法(自学)
γ
⋅=tan Q P ϕ
⋅=⋅=tan Q f N F 2121ϕ
γf 21
F P f 无论驱动力如何增大,机械都无法运转的现象称为机械的自锁。
γ
⋅=tan Q P ϕ
⋅=⋅=tan Q f N F 2121ϕ
=γ21
F P =
γ
⋅=tan Q P ϕ
⋅=⋅=tan Q f N F 212121
F P p ϕ
γp 产生自锁现象的原因:驱动力有效分力小于摩擦力移动副自锁条件为:γ<ϕ,
即推动力的合力T 的作用线位于摩擦角内。
驱动力矩< 摩擦力矩
转动副的自锁条件:h<ρ
当外力(包括驱动力和径向载荷)的合力作用在转动副的摩擦圆内时,无论合力有多大,轴(处于静止状态时)都无法
转动,处于自锁状态。
运动副自锁条件:
ϕγp ρ
p h
d
f d r W W 1W W −==η机械的自锁条件:
≤η
熟练掌握考虑摩擦时机构总反力方向确定
正确理解机械的自锁的概念
理解掌握工程问题处理解决方法—当量摩擦系数
螺旋副摩擦问题。