弱磁控制
- 格式:docx
- 大小:231.75 KB
- 文档页数:2
永磁同步电机弱磁控制原理永磁同步电机是一种高效、高性能的电机,具有高转矩密度、高效率、高精度等优点,因此在工业生产中得到了广泛应用。
然而,永磁同步电机在运行过程中,由于磁场的不稳定性,容易出现磁场失稳、转速波动等问题,影响了电机的性能和稳定性。
为了解决这些问题,人们提出了弱磁控制原理,通过控制电机的磁场,使其保持稳定,从而提高电机的性能和稳定性。
弱磁控制原理是指在永磁同步电机运行过程中,通过控制电机的磁场,使其保持在一定的范围内,从而保证电机的性能和稳定性。
具体来说,弱磁控制原理包括两个方面:一是控制电机的磁场强度,二是控制电机的转速。
控制电机的磁场强度是弱磁控制原理的核心。
在永磁同步电机中,磁场的强度直接影响电机的性能和稳定性。
如果磁场过强或过弱,都会导致电机的性能下降或者失稳。
因此,弱磁控制原理要求控制电机的磁场强度在一定的范围内,既不能过强,也不能过弱。
具体来说,可以通过控制电机的电流来控制磁场的强度。
当电机的电流过大时,磁场会过强,导致电机失稳;当电流过小时,磁场会过弱,导致电机性能下降。
因此,弱磁控制原理要求控制电机的电流在一定的范围内,从而控制磁场的强度。
控制电机的转速也是弱磁控制原理的重要方面。
在永磁同步电机中,转速的稳定性直接影响电机的性能和稳定性。
如果转速波动过大,会导致电机的性能下降或者失稳。
因此,弱磁控制原理要求控制电机的转速在一定的范围内,既不能过快,也不能过慢。
具体来说,可以通过控制电机的电流和电压来控制转速的稳定性。
当电机的电流和电压过大时,转速会过快,导致电机失稳;当电流和电压过小时,转速会过慢,导致电机性能下降。
因此,弱磁控制原理要求控制电机的电流和电压在一定的范围内,从而控制转速的稳定性。
弱磁控制原理是一种有效的控制永磁同步电机的方法,可以提高电机的性能和稳定性。
在实际应用中,可以通过控制电机的电流和电压来控制磁场的强度和转速的稳定性,从而实现弱磁控制。
同时,还可以采用先进的控制算法和控制器,提高电机的控制精度和稳定性,进一步提高电机的性能和稳定性。
1、所谓弱磁控制和强磁控制是指通过对电动机或发电机的励磁电流进行的控制。
“弱磁”就是励磁电流小于额定励磁电流;“强磁”则是比额定励磁电流大的励磁电流。
强磁控制又称为强励控制,主要用在发电机短路保护或欠电压保护方面。
当发电机端电压接近于0或下降太多,此时需要通过强行励磁,可使发电机的端电压升高,输出电流增大,触发保护装置动作跳闸,实现保护。
弱磁控制则主要是电动机进行弱磁调速用,发电机弱磁控制则主要是指由直流发电机-直流电动机构成的G-M拖动系统,为了得到软的或下坠的机械特性时才使用。
2、大家好,我做PMSM的控制,用矢量控制的方法,id=0的控制方式已经做成功了,但在id=0方式下,电机只能工作在额定转速以下工作,速度就再也上不去了,我看了很多书和资料,发现只能用弱磁控制的方法才能提高转速,但书上讲的都很理论的东西,就是要控制Id电流,结果Id电流的计算公式特别复杂,里面含有直轴和交轴电感,还有电枢的磁链,而这些参数又都是难以测量的,所以我现在的问题是:
1.如果要实现弱磁控制,怎么样才能简单地判断id与iq电流的大小关系?
2.转速在额定转速以上运行时,速度与id之间有什么对应的关系没有?如何处理?。
新能源汽车新型电机的设计及弱磁控制新能源汽车的发展是当前汽车行业的热点之一,而电机作为新能源汽车的核心部件之一,其设计及弱磁控制技术的研究与应用也备受关注。
本文将从新能源汽车电机的设计以及弱磁控制两个方面进行探讨。
一、新能源汽车电机的设计新能源汽车电机的设计是保证其高效、稳定、可靠运行的关键。
首先,电机的功率和转速需与车辆的需求相匹配,以确保车辆性能的高效和稳定。
其次,电机的结构和材料选择应考虑到轻量化和散热性能,以提高车辆的续航里程和承载能力。
此外,电机的控制系统也需要具备高效率、快速响应和精准控制的特点,以满足不同驾驶场景下的需求。
针对以上需求,新能源汽车电机的设计通常采用无刷直流电机(BLDC)或永磁同步电机(PMSM)。
这两种电机具有高效率、高功率密度、高扭矩、低噪音和可靠性好等优点,逐渐成为新能源汽车的首选电机类型。
同时,设计者还需要考虑电机的永磁体材料、绕组结构、冷却系统等方面的优化,以提高电机的性能和可靠性。
二、新能源汽车电机的弱磁控制弱磁控制技术是新能源汽车电机控制领域的重要研究方向之一。
传统的电机控制方法通常采用定磁转矩控制或恒磁转矩控制,但这些方法在低转速和低负载情况下容易产生振动和噪音,同时也会降低电机的效率。
而弱磁控制技术可以有效解决这些问题。
弱磁控制技术通过改变定子电流的相位和振荡频率,实现对电机转矩和速度的精确控制。
其核心思想是在低转速和低负载情况下,通过减小定子电流的幅值,使电机工作在弱磁状态下,从而降低振动和噪音,提高电机的效率。
同时,弱磁控制技术还可以实现对电机转矩的精确控制,使车辆在起步、行驶和制动等不同工况下具备更好的驾驶性能和舒适性。
弱磁控制技术的实现主要依赖于先进的电机控制算法和控制器的设计。
目前,常用的控制算法包括PID控制、模糊控制和神经网络控制等。
这些算法可以根据电机的输出信号和目标转矩进行自适应调节,以实现对电机转矩和速度的精确控制。
同时,控制器的设计也需要考虑到实时性、可靠性和抗干扰性等因素,以确保电机控制系统的稳定性和可靠性。
弱磁控制原理与控制方法个人总结
弱磁控制原理是一种通过控制电机的磁场强度来控制转速的方法。
传统的电机控制方法是通过改变电压或电流来控制转速,但这种方法会导致电机产生大的电磁力,造成机械振动和噪音。
弱磁控制原理的核心是通过控制电机磁场的强度来控制转速。
电机磁场的强度与电流成正比,所以通过降低电流来降低磁场的强度,可以实现弱磁控制。
弱磁控制可以减小电机的电磁力,降低机械振动和噪音。
弱磁控制方法一般包括两个步骤:首先,通过调节电机的电流来减小磁场的强度;其次,通过控制器监测电机转速的反馈信号,根据设定的转速和转速误差调整电流。
这样,可以实现电机的闭环控制,使其稳定运行在设定的转速范围内。
弱磁控制方法相对于传统的控制方法有很多优点。
首先,可以降低机械振动和噪音,提高电机的稳定性和可靠性。
其次,可以减少能耗,节省能源。
再次,可以提高电机的寿命,减少维护和更换的成本。
然而,弱磁控制方法也存在一些局限性。
首先,需要复杂的控制器和算法来实现闭环控制,增加了系统的复杂度和成本。
其次,弱磁控制方法只适用于某些特定的应用场景,对电机性能要求较高。
综上所述,弱磁控制原理和方法是一种有效的控制电机转速的方法,可以降低机械振动和噪音,提高电机的性能和可靠性。
然而,弱磁控制方法也有其局限性,需要根据具体的应用场景和需求来选择合适的控制方法。
永磁同步电机弱磁控制0扭矩的原因-概述说明以及解释1.引言1.1 概述永磁同步电机作为一种高效、节能的电机类型,广泛应用于电动汽车、工业生产等领域。
弱磁控制作为一种控制策略,在提高电机效率和降低能耗方面具有重要作用。
然而,在弱磁控制下,永磁同步电机可能出现零扭矩的情况,这将影响电机的性能和工作稳定性。
因此,本文将探讨弱磁控制下永磁同步电机出现零扭矩的原因,并提出解决方案,为优化永磁同步电机的控制效果提供参考。
写文章1.1 概述部分的内容1.2 文章结构文章结构部分是关于整篇文章内容的组织和安排的说明。
在这篇文章中,主要分为引言、正文和结论三个部分。
具体来说,引言部分包括概述、文章结构和目的三个小节,通过引言部分引领读者对文章主题有一个整体的认识和准备。
正文部分主要包括永磁同步电机的基本原理、弱磁控制的概念和应用、以及弱磁控制下出现零扭矩的可能原因三个小节,通过详细介绍这些内容来帮助读者深入了解永磁同步电机弱磁控制0扭矩的原因。
结论部分则包括总结弱磁控制对永磁同步电机的影响、对零扭矩问题的解决建议,以及展望未来永磁同步电机的发展方向三个小节,通过对文章内容进行总结和展望,让读者对这一主题有一个更加深入和全面的理解。
整个文章结构清晰明了,让读者能够系统性地了解和学习关于永磁同步电机弱磁控制0扭矩的问题。
1.3 目的本文旨在探讨永磁同步电机弱磁控制下出现零扭矩的原因。
通过对永磁同步电机的基本原理和弱磁控制的概念进行分析,深入探讨在弱磁控制模式下零扭矩问题可能出现的原因,为进一步研究和解决这一问题提供理论支持。
同时,本文还致力于总结弱磁控制对永磁同步电机性能的影响,并提出解决零扭矩问题的建议,为永磁同步电机的应用和发展提供参考和指导。
最终,本文旨在展望未来永磁同步电机的发展方向,推动其在各种应用领域中的广泛应用和进步。
2.正文2.1 永磁同步电机的基本原理永磁同步电机是一种通过永磁体产生磁场,并利用定子绕组和转子磁场之间的相互作用产生转矩的电机。
永磁同步电机的弱磁控制
永磁同步电机被广泛应用于许多工业领域,如汽车工业、航天航空、机器人、风力发
电和家用电器等。
在永磁同步电机的控制方案中,弱磁控制是一种有效的控制方法,可以
提高永磁同步电机的效率、降低成本和减少能源消耗。
弱磁控制的主要原理是在永磁同步电机的运行过程中,通过降低磁通密度和磁场强度
来减少机械损耗和电流损耗,从而实现能耗的优化。
弱磁控制的另一个优点是可以减少永
磁模拟器的成本,因为永磁模拟器可以用绕组替代,从而减少用于控制电流的硬件成本。
弱磁控制的主要步骤包括:
1. 建立永磁同步电机的数学模型。
对于永磁同步电机的数学模型,可以采用矢量控
制法、电气模型和磁路模型等多种方法进行建模。
2. 选择合适的控制策略。
弱磁控制中,可以采用间接矢量控制和直接转矩控制两种
策略。
其中,采用直接转矩控制可以在永磁同步电机低速运行时减少电流损耗。
3. 设计控制算法。
控制算法是实现弱磁控制的关键,需要综合考虑控制精度、实时性、稳定性等因素进行设计。
4. 实现控制。
弱磁控制需要通过电子控制器来实现,在控制器中可以使用DSP、FPGA、ARM等芯片进行实现。
弱磁控制的实际应用需要考虑到永磁同步电机的不同工作状态。
在低速运行状态下,
弱磁控制可以减少永磁同步电机的电流损耗和机械损耗;在高速运行状态下,弱磁控制可
以减少永磁同步电机的谐波噪声和振动。

基于负id补偿的弱磁控制在这个世界上,有一种东西总是让我们深感头疼——那就是“弱磁控制”。
想想看,咱们日常生活中无时无刻不被磁场影响着。
地球本身就像一个大磁铁,手机、电视、电脑这些东西也是常常给我们带来磁场干扰。
可是呢,今天我们要说的,正是如何通过“负id补偿”来控制这些弱磁场,避免它们“做乱”。
听起来是不是有点复杂?别急,慢慢聊,咱们从头说起。
咱们得先搞清楚一个问题,什么是“弱磁控制”?其实很简单,磁场强度弱,设备的正常工作就容易被干扰。
比如说有些精密仪器,它们对磁场的敏感度特别高,稍微一有波动就可能出现误差,甚至导致故障。
所以我们要做的,就是想方设法把这些磁场的干扰降到最低,保持系统稳定。
这就像是在一个动荡不安的环境中寻找到平静的那一块宁静地,听起来是不是有点像“抓住一丝希望”?不过,要做到这一点,可不容易。
传统的弱磁控制方法,都是通过各种手段来降低外界磁场的影响。
可是,有时候效果并不理想,甚至还会带来新的问题。
你说,你解决了一个问题,结果却弄得更麻烦,那可就尴尬了!于是乎,聪明的科学家们就想到了“负id补偿”这个办法。
说白了,就是通过调整设备的工作状态,巧妙地消除磁场影响,从而确保它们的正常运行。
听着是不是像个高大上的技术?其实就是利用一些电流或者电压的调整,把“问题”给“引导”走。
我知道你可能想问,什么叫“负id补偿”呢?它就是在电路中,通过引入与原有信号相反的补偿信号来抵消磁场的干扰。
想象一下,如果你在船上摇晃不定,突然一个朋友过来给你扶一把,稳住了船的平衡,这不就相当于补偿吗?这种方法,虽然看起来简单,但其实有着非常强大的作用。
不仅可以有效降低弱磁场的影响,还能提高系统的稳定性和可靠性。
是不是觉得特别牛?实际上,很多高精尖的设备,都是靠这种“负id补偿”来保证性能的。
不过呢,说到这里,咱们得承认,做这个“负id补偿”也不是那么一帆风顺的事儿。
你要知道,磁场可不像空气那样简单,它的变化有时候真是让人捉摸不透。
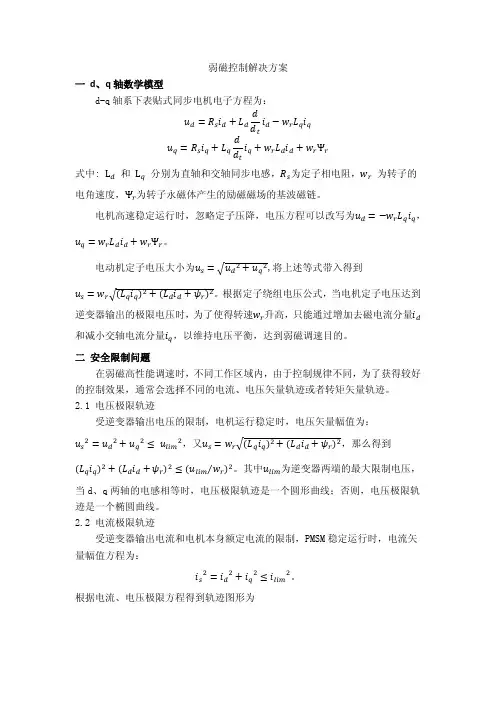
弱磁控制解决方案一d、q轴数学模型d-q轴系下表贴式同步电机电子方程为:式中: 和分别为直轴和交轴同步电感,为定子相电阻,为转子的电角速度,为转子永磁体产生的励磁磁场的基波磁链。
电机高速稳定运行时,忽略定子压降,电压方程可以改写为,。
电动机定子电压大小为√,将上述等式带入得到√。
根据定子绕组电压公式,当电机定子电压达到逆变器输出的极限电压时,为了使得转速升高,只能通过增加去磁电流分量和减小交轴电流分量,以维持电压平衡,达到弱磁调速目的。
二安全限制问题在弱磁高性能调速时,不同工作区域内,由于控制规律不同,为了获得较好的控制效果,通常会选择不同的电流、电压矢量轨迹或者转矩矢量轨迹。
2.1 电压极限轨迹受逆变器输出电压的限制,电机运行稳定时,电压矢量幅值为:,又√,那么得到⁄。
其中为逆变器两端的最大限制电压,当d、q两轴的电感相等时,电压极限轨迹是一个圆形曲线;否则,电压极限轨迹是一个椭圆曲线。
2.2 电流极限轨迹受逆变器输出电流和电机本身额定电流的限制,PMSM稳定运行时,电流矢量幅值方程为:。
根据电流、电压极限方程得到轨迹图形为电动机稳定运行时,定子电流矢量既不能超过电压极限圆也不能超过电流极限圆。
如果1时,电流矢量的范围限制在ABCDEF中。
三弱磁控制3.1 弱磁控制方案一*主要控制流程:电机控制进入弱磁控制模式后,保持电流矢量大小不变,通过调节超前角β大小,调节d、q两轴电流、,通过反馈调节确定电压极限圆限制。
通过反馈结果确定超前角β变化趋势。
弱磁控制主要面临的问题1 进入弱磁控制状态,退出弱磁控制状态。
通常进入弱磁控制状态是电压或电流的调节达到了逆变器的饱和度。
以id=0的控制模式为例,调节q轴电流,确保定子两端电压值不超过Vmax。
当q轴电流达到设定的值,如果需要继续增加电机转速只能通过弱磁调节(保持电机硬件参数不变)。
首先保证电子两端电流大小i s不变,通过调节d、q两轴电流实现调节。
2 调节d、q两轴电流值调节d、q两轴电流过程中应该保证有效电流大小i s恒定,满足关系式为i s√i d i q。

永磁同步电机的弱磁控制方法
永磁同步电机的弱磁控制方法主要是通过改变电机的定子电压来实现。
具体的方法包括:
1. 降低定子电压:降低定子电压可以减少磁场的强度,从而实现弱磁控制。
可以通过调节主控制器的输出电压或者使用变压器等方式降低定子电压。
2. 改变定子电流相位:可以通过改变定子电流的相位来改变磁场的强度。
通过控制主控制器的开关方式,可以改变电流的相位,从而达到弱磁控制的目的。
3. 调节磁场励磁:可以通过调节电机的励磁电流来改变磁场的强度。
通过控制主控制器的励磁电流,可以实现弱磁控制。
4. 使用矢量控制方法:矢量控制方法是一种智能控制方法,可以通过控制电流和磁场的方向来实现弱磁控制。
通过计算电机的电流和磁场的方向,然后调节主控制器的输出,可以实现弱磁控制。
总的来说,弱磁控制方法主要是通过调节定子电压、定子电流相位、励磁电流或使用矢量控制方法来实现。
这些方法可以有效地控制永磁同步电机的磁场强度,从而实现弱磁运行。
foc弱磁控制方法
在FOC(磁场定向控制)框架中实现弱磁控制的方法主要是通过调整电流矢量的方式。
弱磁控制的主要目标是减小电机反电动势输出,从而达到提高电机运行转速的目的。
一种常见的方法是将d轴方向的电流分量设置为0,或者加入负电流来削弱转子磁场。
这种方法的关键在于利用电流产生的磁场与转子磁场之间的相互作用关系。
在矢量控制中,控制三相输入电流的大小和方向至关重要,特别是垂直于转子磁体轴方向的分量(d-q结构)。
垂直方向的电流分量产生的磁场与转子磁场正交,从而产生旋转力矩。
而平行于转子磁轴方向的电流分量则不会产生力矩,但可能会使电机产生多余的热量并加剧轴承的磨损。
因此,应尽量最小化这个电流分量。
总的来说,通过控制三相输入电压和电流,并精确知道转子的实时位置,FOC可以实现弱磁控制,从而提高电机的运行速度范围。
弱磁控制原理与控制方法个人总结
弱磁控制是一种磁控制方法,通过使磁场的强度降低到一个较低的程度,来实现对磁
性材料的控制。
弱磁控制的原理主要包括磁场强度控制和磁场方向控制两方面。
磁场强度控制是通过改变电源电压或电流来控制磁体产生的磁场强度。
当电流或电压
增加时,磁场强度也会相应增加;当电流或电压减小时,磁场强度也会相应减小。
因此,通过调整电源的电压或电流,可以控制磁场的强度。
磁场方向控制是通过改变电流的方向来控制磁体产生的磁场方向。
当电流方向改变时,磁场的方向也会相应改变。
因此,通过改变电流的方向,可以改变磁场的方向。
磁场强度和方向的控制方法有多种,其中较常见的方法包括电流控制、电压控制、PWM控制和闭环控制等。
电流控制是最常见的一种方法,通过调整电源电流的大小来控制磁场的强度。
通常使
用恒流源或可变电阻器来控制电流的大小。
电压控制是通过调整电源电压的大小来控制磁场的强度。
通常使用恒压源或可变电源
来控制电压的大小。
PWM(脉宽调制)控制是一种通过调整PWM信号的占空比来控制磁场的强度的方法。
通过改变PWM信号的占空比,可以改变电流或电压的平均值,从而控制磁场的强度。
闭环控制是一种通过反馈信号来调整控制器输出信号的方法。
通过测量磁场的强度或
磁感应强度,将其与设定值进行比较,然后利用控制器输出信号来调整电流或电压,
从而实现对磁场的控制。
总的来说,弱磁控制是一种通过调整磁场的强度和方向来实现对磁性材料的控制的方法。
通过不同的控制方法和控制策略,可以实现对磁场的精确、稳定的控制。
本文只是简单的叙述一下面贴式PMSM 弱磁控制内容,而不做较深层次的分析,因为是部分个人的见解,所以难免有错误或者不全面的地方,请大家指正,谢谢!驹 QQ :4227413491. 弱磁控制的原理与控制方法 由于逆变器直流侧电压达到最大值后会引起电流调节器的饱和,为了获得较宽的调速范围,在基速以上高速运行时实现恒功率调速,需要对电动机进行弱磁控制。
PMSM 弱磁控制的思想源自他励直流电动机的调磁控制,当他励直流电动机端电压达到最大电压时,只能通过降低电动机的励磁电流,改变励磁磁通,在保证电压平衡的条件下,使电动机能恒功率运行于更高的转速。
也就是说,他励直流电动机可以通过降低励磁电流达到弱磁扩速的目的。
对于 PMSM 而言,励磁磁动势因永磁体产生而无法调节,只能通过调节定子电流,即增加定子直轴去磁电流分量来维持高速运行时电压的平衡,达到弱磁扩速的目的。
1.1. 永磁同步电动机矢量控制的电压、电流轨迹分析 在弱磁高性能调速时,在不同的工作区域内,由于控制规律的不同,为了获得最优的控制效果,通常会选择不同的电流、电压矢量轨迹轨迹,因此,非常有必要去分析了解此时的电流、电压矢量轨迹。
1.1.1. 电压极限椭圆 受逆变器输出电压的限制,PMSM 稳定运行时,电压矢量幅值为: 2lim 222u u u u q d s ≤+= (1-1) 又知当 PMSM 稳定运行时,且忽略定子电阻压降的情况下,电压方程可以化简为: +−=−=f e d d e q q q e d i L u i L u ψωωω (1-2) 将式1-2代入式1-1中可得: 2lim 22)/()()(ωψu i L i L f d d q q =++ (1-3) 式中3/lim dc u u =是定子端相电压,dc u 为直流母线电压。
当q d L L ≠时,为一椭圆方程。
而当q d L L =时,式1-2可化简得圆心在(d f L /ψ−,0)半径为)/(0lim ωL u 的圆方程: 20lim 202)]/([)/(ωψL u L i i f d q =++ (1-4) 以椭圆方程为例,当电流调节器饱和后,定子端相电压为lim u u s =,此时转速ω下对应的运行轨迹为式1-3示dq 坐标系下的椭圆,并称其为转速ω下的电压极限椭圆。
简述弱磁控制原理的应用弱磁控制原理简介弱磁控制原理是指利用磁场对物体进行控制的一种原理。
在弱磁控制中,通常使用较弱的磁场以及磁性材料来实现对物体的操控。
该原理通过控制磁场的强度和方向,可以实现对物体的移动、定位、旋转等操作。
弱磁控制原理的应用弱磁控制原理在各个领域都有广泛的应用。
以下是一些常见的应用场景:•磁悬浮交通弱磁控制原理在磁悬浮交通中起到了重要的作用。
通过在列车和轨道上设置磁性材料,并利用弱磁场的吸引和排斥作用,可以实现对列车的悬浮和推动。
这种技术可以大大减少能量损耗,提高交通效率。
•电磁吸盘电磁吸盘是利用弱磁控制原理制造的设备,通过操控磁场的强度和方向,可以实现对吸盘上物体的精确吸附。
这种技术在工业生产中广泛应用,可以用于定位、固定和操控物体。
•磁性材料分离弱磁控制原理可以用于磁性材料的分离。
通过操控磁场的强弱和方向,可以将磁性材料分离出来,从而方便后续的处理和利用。
这种技术在矿石分离、废旧物品回收等领域有广泛的应用。
•磁性材料过滤利用弱磁控制原理,可以将磁性材料用于液体或气体的过滤。
通过在过滤器内设置磁性材料,可以有效地捕获其中的磁性颗粒,从而提高过滤效果。
这种技术在食品加工、环境保护等领域有着重要的应用。
•磁力传动弱磁控制原理可以被应用于磁力传动系统。
通过利用磁场的吸引和排斥作用,可以实现对传动装置的转动,从而实现机械传动。
这种技术在一些特殊环境下应用广泛,例如高温、高湿度和易燃易爆等场所。
•磁性材料治疗弱磁控制原理在医疗领域也有着广泛的应用。
通过操控磁场的强度和方向,可以对人体进行治疗和康复。
例如,磁性材料可以用于磁疗装置,帮助缓解疼痛,促进血液循环等。
总结弱磁控制原理是一种通过利用磁场对物体进行控制的原理。
它在磁悬浮交通、电磁吸盘、磁性材料分离、磁性材料过滤、磁力传动和磁性材料治疗等领域都有着广泛的应用。
弱磁控制技术的不断发展和创新将会为我们带来更多的便利和惊喜。
弱磁控制原理弱磁控制原理一、概述弱磁控制是指在某些电动机的起动和运行过程中,将电机的励磁电流降低到一定程度,使得电机的输出功率略有降低,但可以大幅度地节省能源。
这种技术被广泛应用于各种类型的电机中,如交流异步电机、直流电机、永磁同步电机等。
本文将详细介绍弱磁控制的原理及其应用。
二、弱磁控制原理1. 弱磁控制的基本思想弱磁控制是通过调节电动机的励磁电流来实现降低输出功率和节能的目的。
在正常运行时,励磁电流通常较高,但在某些情况下,如负载较轻或要求较低的速度精度时,可以适当地降低励磁电流。
这样做可以减少铜损耗和铁损耗,从而达到节能减排、延长设备寿命等效果。
2. 弱磁控制对输出特性的影响在弱磁状态下,由于励磁电流的降低,电机的输出功率也会相应地降低。
但是,由于铜损耗和铁损耗的减少,电机的效率却有所提高。
因此,在一定范围内,弱磁控制可以实现节能的同时不影响电机的正常工作。
3. 弱磁控制对电机运行稳定性的影响在弱磁状态下,由于励磁电流较低,电机转子上的永磁体或感应器件所产生的磁场将会对励磁线圈产生一定程度上的干扰。
这种干扰可能会影响到电机运行的稳定性和精度。
因此,在使用弱磁控制时需要根据具体情况进行合理调整。
4. 弱磁控制对系统响应速度的影响在弱磁状态下,由于输出功率较低,电机响应速度也会相应地减慢。
这可能会影响到某些需要快速响应的场合。
因此,在使用弱磁控制时需要根据具体情况进行合理调整。
三、弱磁控制技术在不同类型电机中的应用1. 交流异步电机中的应用在交流异步电机中,弱磁控制可以通过调节励磁电流来实现降低输出功率和节能的目的。
这种技术被广泛应用于风机、水泵等负载较轻的场合。
此外,在一些需要精确控制转速的场合,如纺织机械、卷绕机等,也可以使用弱磁控制技术。
2. 直流电机中的应用在直流电机中,弱磁控制可以通过调节励磁电流来实现降低输出功率和节能的目的。
这种技术被广泛应用于风机、水泵等负载较轻的场合。
此外,在一些需要快速响应和高精度控制的场合,如半导体设备、医疗设备等,也可以使用弱磁控制技术。
错误!未定义书签。
错误!未定义书签。
永磁同步电机弱磁控制方法摘要:永磁同步电机(Permanent magnet synchronous machine,PMSM)由于其高功率密度、高可靠性和高效率等特点,在电动汽车等要求较高的调速驱动系统中得到了广泛的应用。
永磁同步电机必须采用弱磁控制技术以满足宽转速范围的调速需求,对其进行弱磁控制并拓宽调速范围有着重要意义。
本文针对现在常用的几种永磁同步电机弱磁控制方法进行综述。
基于控制对象的不同,对弱磁控制方法进行分类,并详细介绍了目前比较常见的负id补偿法、查表法、梯度下降法、电流角度法、单电流调节器法等方法,分析了各方法的原理及特点,得出以电压为控制对象的弱磁方法具有一定发展前景的结论。
关键词:永磁同步电机;弱磁控制;内置式永磁同步电机;矢量控制The Field Weakening Control Strategy of Permanent MagnetSynchronous MotorAbstract:PMSM because of its high power density,high reliability and high efficiency characteristics,at a higher speed requirements of electric vehicle drive system has been widely used. PMSM weakening control technology must be used to meet the needs of a wide speed range 。
And because of its salient pole effect,it is of great significance to broaden the scope of the weak magnetic field of IPMSM. In this paper,the commonly used weakening control method of PMSM are reviewed.Based on the different control object,we classify the weak magnetic control method, and introduces in detail the negative id compensation method, look-up table method,gradient descent method,current angle method,single current regulator method that is used commonly at present,analyzes the principle and characteristics of each method.Finally, we conclude that voltage control field weeking method has development prospects 。
2016年6月12日星期日
电机的弱磁控制原理
异步电机变压变频调速的控制特性
基频以下:恒转矩调速(恒磁通调速)
电机启动电流大的原因:
当感应电动机处在停止状态时,从电磁的角度看,就象变压器,接到电源去的定子绕组相当于变压器的一次线圈,成闭路的转子绕组相当于变压器被短路的二次线圈;定子绕组和转子绕组间无电的的联系,只有磁的联系,磁通经定子、气隙、转子铁芯成闭路。
当合闸瞬间,转子因惯性还未转起来,旋转磁场以最大的切割速度——同步转速切割转子绕组,使转子绕组感应起可能达到的最高的电势,因而,在转子导体中流过很大的电流,这个电流产生抵消定子磁场的磁能,就象变压器二次磁通要抵消一次磁通的作用一样。
而定子方面为了维护与该时电源电压相适应的原有磁通,遂自动增加电流。
因为此时转子的电流很大,故定子电流也增得很大,甚至高达额定电流的4~7倍,这就是启动电流大的缘由。
启动后电流为什么小?
随着电动机转速增高,定子磁场切割转子导体的速度减小,转子导体中感应电势减小,转子导体中的电流也减小,于是定子电流中用来抵消转子电流所产生的磁通的影响的那部分电流也减小,所以定子电流就从大到小,直到正常。
随着启动电流增大,损耗增大,即定子端电压下降。
空载电流:不为0,一般是额定电流的1/3。
对永磁同步电机的仿真分析(举例)
分析电机在启动时,启动电流达到额定值的3倍,至0.03S稳定。
起初负载转矩给定3N*m,至0.1S时负载转矩给定为1N*m,定子电流的波形对于变小,电磁转矩与负载转矩平衡,使得电机稳定运行。
转速刚启动瞬间为0,但大约经过0.02S后电机转速达到给定值,当0.1S时负载突然减小,转速有短暂的上升,立刻回到给定值,转速比较稳定,达到理想。
电机启动时,电磁转矩启动时较大,至0.03S后电磁转矩达到3N*m,0.1S时负载转矩发生变化,即电磁转矩也相应的发生变化。
电机空载运行时,空载电流的幅值大约是额定值的1/3,绝对不为0,平均值为0,相应的三相静止定子电流为120度,两相静止坐标互差90度,
空载情况下,0.2S之前空载,其输出的两相静止坐标近似为0 ,但肯定不是0,由于采用id=0控制,即直轴电流一直是0,而转矩电流iq在控制是电流几乎为0,加负载后,值增加。
当空载时,输出转矩为0,突然增加负载时,输出转矩相应增加。