机器人学基础 第8章 机器人编程 蔡自兴
- 格式:ppt
- 大小:1.40 MB
- 文档页数:49

机器人学蔡自兴课后习题答案其余的比较简单,大家可以自己考虑。
3. 坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕B Z 轴旋转θ角;然后再绕B X 旋转φ角。
给出把对矢量P B 的描述变为对P A描述的旋转矩阵。
解:Θ坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
∴对P A 描述有 P T P BA BA = ; 其中 ),(),(φθx Rot z Rot T AB = 。
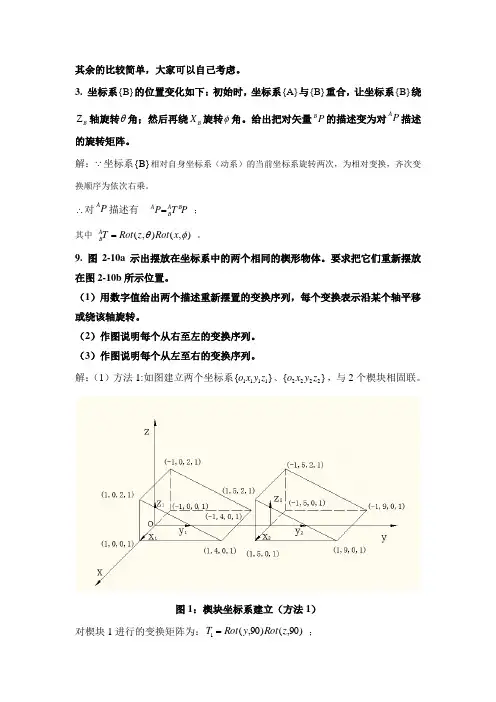
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系}{1111z y x o 、}{2222z y x o ,与2个楔块相固联。
图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ; 对楔块2进行的变换矩阵为:)180,()90,()90,()4,0,3(oo 02o 2z Rot x TRot z Rot Trans T --= ;其中 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=100001005010000102T ; 所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10004010000121002T 对楔块2的变换步骤:① 绕自身坐标系X 轴旋转︒90; ② 绕新形成的坐标系的Z 轴旋转︒180; ③ 绕定系的Z 轴旋转︒-90; ④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111zyxo、}{2222zyxo与参考坐标系重合,两坐标系与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:)90,()90,(1zRotyRotT=;对楔块2进行的变换矩阵为:)90,()180,()90,()0,0,4()9,0,2(ooo2--=zRotxRotyRotTransTransT;所以:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=11111T;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=1911212T。

其余的比较简单,大家可以自己考虑。
3. 坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕B Z 轴旋转θ角;然后再绕B X 旋转φ角。
给出把对矢量P B 的描述变为对P A描述的旋转矩阵。
解: 坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
∴对P A 描述有 P T P BA B A = ;其中 ),(),(φθx Rot z Rot T AB = 。
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系}{1111z y x o 、}{2222z y x o ,与2个楔块相固联。
图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ;对楔块2进行的变换矩阵为:)180,()90,()90,()4,0,3(oo 02o 2z Rot x TRot z Rot Trans T --= ;其中 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=100001005010000102T ; 所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10004010000121002T 对楔块2的变换步骤:① 绕自身坐标系X 轴旋转︒90; ② 绕新形成的坐标系的Z 轴旋转︒180; ③ 绕定系的Z 轴旋转︒-90; ④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111z y x o 、}{2222z y x o 与参考坐标系重合,两坐标系与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ; 对楔块2进行的变换矩阵为:)90,()180,()90,()0,0,4()9,0,2(o o o 2--=z Rot x Rot y Rot Trans Trans T ;所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10009010000121002T 。
《机器人初步知识》学历案(第一课时)一、学习主题本课程的学习主题为“机器人初步知识”,重点掌握机器人的基本概念、机器人的发展历程、机器人的分类以及机器人在日常生活中的应用。
通过本课程的学习,学生将初步了解机器人技术的基本原理和基础知识,为后续深入学习打下基础。
二、学习目标1. 知识与理解:掌握机器人的基本概念,了解机器人的发展历程及主要应用领域。
2. 过程与方法:通过观看视频、阅读资料、小组讨论等方式,学会收集和整理有关机器人的信息。
3. 情感态度与价值观:激发学生对机器人技术的兴趣,培养其科学探索精神和创新能力。
三、评价任务1. 知识评价:通过课堂提问和课后小测验,评价学生对机器人基本概念和发展历程的掌握情况。
2. 技能评价:通过小组展示和讨论,评价学生收集和整理信息的能力,以及表达和交流的能力。
3. 过程评价:观察学生在学习过程中的参与度、合作精神和创新思维的表现。
四、学习过程1. 导入新课(5分钟)通过展示一些机器人应用的视频或图片,引导学生进入机器人世界,激发学习兴趣。
2. 知识讲解(15分钟)(1)讲解机器人的基本概念,包括定义、发展历程等。
(2)介绍机器人的分类,如工业机器人、服务机器人、特种机器人等。
(3)讲解机器人在日常生活中的应用,如智能家居、无人驾驶等。
3. 观看视频与资料阅读(10分钟)(1)播放机器人相关视频,让学生更直观地了解机器人的工作原理和应用场景。
(2)阅读相关机器人资料,加深对机器人知识的理解。
4. 小组讨论与交流(10分钟)(1)学生分组,每组讨论机器人的特点和应用领域,并选出代表进行汇报。
(2)教师巡视指导,及时解答学生疑问,鼓励学生的创新思维。
5. 总结与反馈(5分钟)(1)教师总结本课内容,强调重点和难点。
(2)收集学生的反馈意见,为后续教学提供参考。
五、检测与作业1. 课堂小测验:检测学生对机器人基本概念和发展历程的掌握情况。
2. 作业:要求学生以“我心目中的机器人”为主题,写一篇短文,描述自己心目中的机器人形象及其应用场景。
机器人学蔡自兴答案【篇一:机器人学导论复习题及参考答案新】lass=txt>机器人学导论一、名词解释题:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
4.试论述机器人静力学、动力学、运动学的关系。
四、计算题:(需写出计算步骤,无计算步骤不能得分):位得到点t。
求u, v, w, t各点的齐次坐标。
2.如图所示为具有三个旋转关节的3r机械手,求末端机械手在基坐标系{x0,y0}下的运动学方程。
11pfx?0??5.如图所示的两自由度机械手,手部沿固定坐标系在手上x0轴正向以1.0m/s的速度移动,杆长可比矩阵为??l1s?1?l2s12j???l1c?1?l2c12?l2s12?? l2c12?26.如图所示的三自由度机械手(两个旋转关节加一个平移关节,简称rpr机械手),求末端机械手的运动学方程。
参考答案一、名词解释题:二、简答题:1.答:机器人研究的基础内容有以下几方面:(1) 空间机构学;(2)机器人运动学;(3) 机器人静力学;(4)机器人动力学;(5)机器人控制技术;(6)机器人传感器;(7)机器人语言。
2.答:目前常用的有如下几种形式:(1)横梁式。
机身设计成横梁式,用于悬挂手臂部件,具有占地面积小,能有效地利用空间,直观等优点。
(2)立柱式。
多采用回转型、俯仰型或屈伸型的运动型式,一般臂部都可在水平面内回转,具有占地面积小而工作范围大的特点。
(3)机座式。
可以是独立的、自成系统的完整装置,可随意安放和搬动。
也可以具有行走机构,如沿地面上的专用轨道移动,以扩大其活动范围。
(4)屈伸式。
臂部由大小臂组成,大小臂间有相对运动,称为屈伸臂,可以实现平面运动,也可以作空间运动。
其余的比较简单,大家可以自己考虑。
3. 坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕B Z 轴旋转θ角;然后再绕B X 旋转φ角。
给出把对矢量P B 的描述变为对P A描述的旋转矩阵。
解: 坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
∴对P A 描述有 P T P BA B A = ;其中 ),(),(φθx Rot z Rot T AB = 。
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系}{1111z y x o 、}{2222z y x o ,与2个楔块相固联。
图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ;对楔块2进行的变换矩阵为:)180,()90,()90,()4,0,3(oo 02o 2z Rot x TRot z Rot Trans T --= ;其中 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=100001005010000102T ; 所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10004010000121002T 对楔块2的变换步骤:① 绕自身坐标系X 轴旋转︒90; ② 绕新形成的坐标系的Z 轴旋转︒180; ③ 绕定系的Z 轴旋转︒-90; ④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111z y x o 、}{2222z y x o 与参考坐标系重合,两坐标系与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ; 对楔块2进行的变换矩阵为:)90,()180,()90,()0,0,4()9,0,2(o o o 2--=z Rot x Rot y Rot Trans Trans T ;所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10009010000121002T 。
其余的比较简单,大家可以自己考虑。
3. 坐标系{B}的位置变化如下:初始时,坐标系{A}与{B}重合,让坐标系{B}绕描述AB的描述变为对PZ轴旋转角;然后再绕X B旋转角。
给出把对矢量PB的旋转矩阵。
解:坐标系{B}相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
A;对P A A B描述有P T PBA其中T Rot(z,)Rot(x,)B。
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系{1x y z}o2x y z,与2个楔块相固联。
o、{}111222图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:T1Rot(y,90)Rot(z,90);对楔块2进行的变换矩阵为:o0o o T2Trans(3,0,4)Rot(z,90)TRot(x,90)Rot(z,180);21000其中01052T;0010000100100012所以:1000T;10100T2114 00010001对楔块2的变换步骤:①绕自身坐标系X轴旋转90;②绕新形成的坐标系的Z轴旋转180;③绕定系的Z轴旋转90;④沿定系的各轴平移(3,0,4)。
方法2:如图建立两个坐标系{o1x y z}、{o2x2y2z2}与参考坐标系重合,两坐标系111与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:T1Rot(y,90)Rot(z,90);对楔块2进行的变换矩阵为:o o oT2Trans(2,0,9)Trans(4,0,0)Rot(y,90)Rot(x,180)Rot(z,90);00100012所以:1000T;101001000T。