机器人学基础 第6章 机器人传感器 蔡自兴
- 格式:ppt
- 大小:2.26 MB
- 文档页数:41

机器人学蔡自兴课后习题答案其余的比较简单,大家可以自己考虑。
3. 坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕B Z 轴旋转θ角;然后再绕B X 旋转φ角。
给出把对矢量P B 的描述变为对P A描述的旋转矩阵。
解:Θ坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
∴对P A 描述有 P T P BA BA = ; 其中 ),(),(φθx Rot z Rot T AB = 。
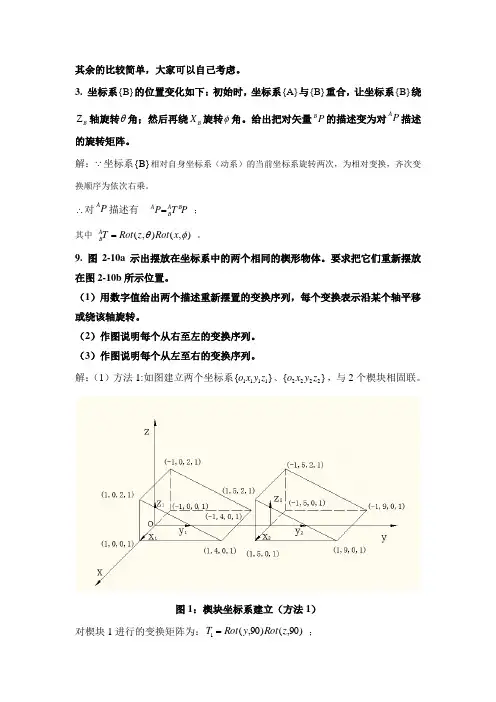
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系}{1111z y x o 、}{2222z y x o ,与2个楔块相固联。
图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ; 对楔块2进行的变换矩阵为:)180,()90,()90,()4,0,3(oo 02o 2z Rot x TRot z Rot Trans T --= ;其中 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=100001005010000102T ; 所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10004010000121002T 对楔块2的变换步骤:① 绕自身坐标系X 轴旋转︒90; ② 绕新形成的坐标系的Z 轴旋转︒180; ③ 绕定系的Z 轴旋转︒-90; ④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111zyxo、}{2222zyxo与参考坐标系重合,两坐标系与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:)90,()90,(1zRotyRotT=;对楔块2进行的变换矩阵为:)90,()180,()90,()0,0,4()9,0,2(ooo2--=zRotxRotyRotTransTransT;所以:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=11111T;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=1911212T。
《机器人技术基础》课程教学大纲一、课程名称:机器人技术基础THE FOUNDATION OF ROBERT TECHNOLOGY二、课程编码:0801051三、学时与学分:32/2四、先修课程:材料成形原理计算机辅助设计与制造五、课程教学目标介绍机器人学的概况、机器人学的数学基础、机器人运动学、机器人动力学、机器人控制原则与方法、机器人在材料成型加工和焊接中的应用。
使学生基本掌握机器人技术的基本原理,及该技术在材料加工过程中的应用,了解该技术在国际上的最新发展动向。
六、适用学科专业材料加工与控制七、基本教学内容与学时安排(一)绪论及机器人学发展历史1机器人的由来2机器人的定义3机器人学的进展(二)机器人的特点、结构与分类1机器人的主要特点2机器人系统的结构3机器人的自由度4机器人的分类5基本部件6工业机器人的操作7运动控制方法(三)机器人运动学与动力学1机器人运动方程的表示2机械手运动方程的求解3 PUMA 560 机器人运动方程4机器人的雅可比公式5刚体动力学6机械手动力学方程7机器人的动态特性(四)机器人的驱动与控制1机器人的基本控制原则2机器人的智能控制3机器人传感器4视觉传感器5测距、触觉传感器6运动机器人的传感器及集成控制(五)机器人编程及软件1机器人编程要求与语言类型2机器人语言系统结构和基本功能3常用的机器人编程语言及软件4机器人的离线编程(六)工业机器人在机械加工中的应用1机器人在成型中的应用1)铣削成型机器人2)冲压成型机器人3)无模成型机器人2机器人材料成型控制系统与软件系统3机器人在焊接中的应用1)焊接机器人控制系统组成2)焊接机器人软件系统4喷漆机器人5其它应用(七)工业机器人的经济分析及社会效益(八)机器人的发展学时分配(一)机器人的发展历史:2学时(二)机器人的特点、结构与分类:2学时(三)机器人运动学和动力学:2学时(四)机器人的驱动与控制:4学时(五)机器人编程及软件:4学时(六)工业机器人在机械加工中的应用:4+6学时(七)工业机器人的经济分析及社会效益:2学时(八)机器人的发展:2学时八、教材及参考书[美]尔尼L.贺尔,贝蒂C.贺尔,《机器人学入门》,天津大学出版社,1987年11月蔡自兴著,《机器人学》,清华大学出版社,2000年9月第1版林尚扬等编著,《焊接机器人及其应用》,机械工业出版社,2000年7月第1版张福学,《机器人技术及其应用》,电子工业出版社,出版日期:2000年1月第1版九、考核方式书面考试+作业+实验。
第六章 机器人运动学及动力学6.1 引论到现在为止我们对操作机的研究集中在仅考虑动力学上。
我们研究了静力位置、静力和速度,但我们从未考虑过产生运动所需的力。
本章中我们考虑操作机的运动方程式——由于促动器所施加的扭矩或作用在机械手上的外力所产生的操作机的运动之情况。
机构动力学是一个已经写出很多专著的领域。
的确,人们可以花费以年计的时间来研究这个领域。
显然,我们不可能包括它所应有的完整的内容。
但是,某种动力学问题的方程式似乎特别适合于操作机的应用。
特别是,那种能利用操作机的串联链性质的方法是我们研究的天然候选者。
有两个与操作机动力学有关的问题我们打算去解决。
向前的动力学问题是计算在施加一组关节扭矩时机构将怎样运动。
也就是,已知扭矩矢量τ,计算产生的操作机的运动Θ、Θ和Θ。
这个对操作机仿真有用,在逆运动学问题中,我们已知轨迹点Θ、Θ和Θ,我们欲求出所需要的关节扭矩矢量τ。
这种形式的动力学对操作机的控制问题有用。
6.2 刚体的加速度现在我们把对刚体运动的分析推广到加速度的情况。
在任一瞬时,线速度矢量和角速度矢量的导数分别称为线加速度和角加速度。
即BB Q Q BBQ Q 0V ()V ()d V V lim dt t t t t t∆→+∆-==∆ (6-1)和AA Q Q AAQ Q 0()()d lim dt t t t t t∆→Ω+∆-ΩΩ=Ω=∆ (6-2)正如速度的情况一样,当求导的参坐标架被理解为某个宇宙标架{}U 时我们将用下面的记号U A AORG V V = (6-3)和U A A ω=Ω (6-4)6.2.1 线加速度我们从描述当原点重合时从坐标架{}A 看到的矢量BQ 的速度AA B A A Q B Q B B V V BR R Q =+Ω⨯ (6-5)这个方程的左手边描述AQ 如何随时间而变化。
所以,因为原点是重合的,我们可以重写(6-5)为A AB A A B B Q B B d ()V dtB B R Q R R Q =+Ω⨯ (6-6) 这种形式的方程式当推导对应的加速度方程时特别有用。


其余的比较简单,大家可以自己考虑。
3. 坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕B Z 轴旋转θ角;然后再绕B X 旋转φ角。
给出把对矢量P B 的描述变为对P A描述的旋转矩阵。
解: 坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
∴对P A 描述有 P T P BA B A = ;其中 ),(),(φθx Rot z Rot T AB = 。
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系}{1111z y x o 、}{2222z y x o ,与2个楔块相固联。
图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ;对楔块2进行的变换矩阵为:)180,()90,()90,()4,0,3(oo 02o 2z Rot x TRot z Rot Trans T --= ;其中 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=100001005010000102T ; 所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10004010000121002T 对楔块2的变换步骤:① 绕自身坐标系X 轴旋转︒90; ② 绕新形成的坐标系的Z 轴旋转︒180; ③ 绕定系的Z 轴旋转︒-90; ④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111z y x o 、}{2222z y x o 与参考坐标系重合,两坐标系与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ; 对楔块2进行的变换矩阵为:)90,()180,()90,()0,0,4()9,0,2(o o o 2--=z Rot x Rot y Rot Trans Trans T ;所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10009010000121002T 。
机器人学蔡自兴答案【篇一:机器人学导论复习题及参考答案新】lass=txt>机器人学导论一、名词解释题:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
4.试论述机器人静力学、动力学、运动学的关系。
四、计算题:(需写出计算步骤,无计算步骤不能得分):位得到点t。
求u, v, w, t各点的齐次坐标。
2.如图所示为具有三个旋转关节的3r机械手,求末端机械手在基坐标系{x0,y0}下的运动学方程。
11pfx?0??5.如图所示的两自由度机械手,手部沿固定坐标系在手上x0轴正向以1.0m/s的速度移动,杆长可比矩阵为??l1s?1?l2s12j???l1c?1?l2c12?l2s12?? l2c12?26.如图所示的三自由度机械手(两个旋转关节加一个平移关节,简称rpr机械手),求末端机械手的运动学方程。
参考答案一、名词解释题:二、简答题:1.答:机器人研究的基础内容有以下几方面:(1) 空间机构学;(2)机器人运动学;(3) 机器人静力学;(4)机器人动力学;(5)机器人控制技术;(6)机器人传感器;(7)机器人语言。
2.答:目前常用的有如下几种形式:(1)横梁式。
机身设计成横梁式,用于悬挂手臂部件,具有占地面积小,能有效地利用空间,直观等优点。
(2)立柱式。
多采用回转型、俯仰型或屈伸型的运动型式,一般臂部都可在水平面内回转,具有占地面积小而工作范围大的特点。
(3)机座式。
可以是独立的、自成系统的完整装置,可随意安放和搬动。
也可以具有行走机构,如沿地面上的专用轨道移动,以扩大其活动范围。
(4)屈伸式。
臂部由大小臂组成,大小臂间有相对运动,称为屈伸臂,可以实现平面运动,也可以作空间运动。
其余的比较简单,大家可以自己考虑。
3. 坐标系{B}的位置变化如下:初始时,坐标系{A}与{B}重合,让坐标系{B}绕描述AB的描述变为对PZ轴旋转角;然后再绕X B旋转角。
给出把对矢量PB的旋转矩阵。
解:坐标系{B}相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
A;对P A A B描述有P T PBA其中T Rot(z,)Rot(x,)B。
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系{1x y z}o2x y z,与2个楔块相固联。
o、{}111222图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:T1Rot(y,90)Rot(z,90);对楔块2进行的变换矩阵为:o0o o T2Trans(3,0,4)Rot(z,90)TRot(x,90)Rot(z,180);21000其中01052T;0010000100100012所以:1000T;10100T2114 00010001对楔块2的变换步骤:①绕自身坐标系X轴旋转90;②绕新形成的坐标系的Z轴旋转180;③绕定系的Z轴旋转90;④沿定系的各轴平移(3,0,4)。
方法2:如图建立两个坐标系{o1x y z}、{o2x2y2z2}与参考坐标系重合,两坐标系111与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:T1Rot(y,90)Rot(z,90);对楔块2进行的变换矩阵为:o o oT2Trans(2,0,9)Trans(4,0,0)Rot(y,90)Rot(x,180)Rot(z,90);00100012所以:1000T;101001000T。