【CN109866233A】档案管理机器人【专利】
- 格式:pdf
- 大小:685.00 KB
- 文档页数:14
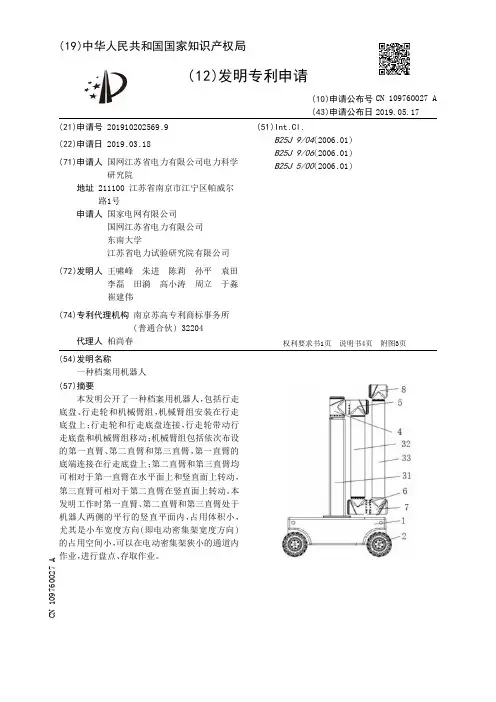
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910202569.9(22)申请日 2019.03.18(71)申请人 国网江苏省电力有限公司电力科学研究院地址 211100 江苏省南京市江宁区帕威尔路1号申请人 国家电网有限公司 国网江苏省电力有限公司 东南大学 江苏省电力试验研究院有限公司(72)发明人 王啸峰 朱进 陈莉 孙平 袁田 李磊 田漪 高小涛 周立 于淼 崔建伟 (74)专利代理机构 南京苏高专利商标事务所(普通合伙) 32204代理人 柏尚春(51)Int.Cl.B25J 9/04(2006.01)B25J 9/06(2006.01)B25J 5/00(2006.01) (54)发明名称一种档案用机器人(57)摘要本发明公开了一种档案用机器人,包括行走底盘、行走轮和机械臂组,机械臂组安装在行走底盘上;行走轮和行走底盘连接,行走轮带动行走底盘和机械臂组移动;机械臂组包括依次布设的第一直臂、第二直臂和第三直臂,第一直臂的底端连接在行走底盘上;第二直臂和第三直臂均可相对于第一直臂在水平面上和竖直面上转动,第三直臂可相对于第二直臂在竖直面上转动。
本发明工作时第一直臂、第二直臂和第三直臂处于机器人两侧的平行的竖直平面内,占用体积小,尤其是小车宽度方向(即电动密集架宽度方向)的占用空间小,可以在电动密集架狭小的通道内作业,进行盘点、存取作业。
权利要求书1页 说明书4页 附图3页CN 109760027 A 2019.05.17C N 109760027A权 利 要 求 书1/1页CN 109760027 A1.一种机器人,其特征在于:包括行走底盘(1)、行走轮(2)和机械臂组,所述机械臂组安装在行走底盘(1)上;行走轮(2)与行走底盘(1)连接,行走轮(2)带动行走底盘(1)和机械臂组移动;所述机械臂组包括依次布设的第一直臂(31)、第二直臂(32)和第三直臂(33),第一直臂(31)的底端连接在行走底盘(1)上;第二直臂(32)和第三直臂(33)均可相对于第一直臂(31)在水平面上和竖直面上转动,第三直臂(33)可相对于第二直臂(32)在竖直面上转动。
![一种档案管理机器人[实用新型专利]](https://uimg.taocdn.com/55e56517910ef12d2bf9e754.webp)
专利名称:一种档案管理机器人
专利类型:实用新型专利
发明人:陈灵杰,李瑞峰,苏昭晖,李振宏,梁凤顺,陈俊宏,饶崇强,黄胜,林文伟,李哲
申请号:CN201921256449.9
申请日:20190805
公开号:CN210361286U
公开日:
20200421
专利内容由知识产权出版社提供
摘要:本实用新型涉及管理档案的智能机械设备领域,具体是公开一种档案管理机器人,包括智能导航定位运输车、机械臂、电动夹爪、档案中转架、档案识别模块和档案管理系统服务器;机械臂架设在智能导航定位运输车上,电动夹爪设置在机械臂的自由端上,档案中转架架设在智能导航定位运输车上,智能导航定位运输车上包括有中控机和通讯模块,智能导航定位运输车、机械臂和电动夹爪的动作通过中控机控制,档案识别模块设置在电动夹爪上,讯模块可用于中控机、档案识别模块、档案管理系统服务器之间的通讯连接。
本实用新型的档案管理机器人机械自动化智能化程度较高,工作效率高,工作稳定失误率低,可用于档案的盘点、整理、管理、数据可追溯等功能作用。
申请人:福建(泉州)哈工大工程技术研究院
地址:362000 福建省泉州市丰泽区软件园9号楼
国籍:CN
代理机构:泉州市立航专利代理事务所(普通合伙)
代理人:姚婉莉
更多信息请下载全文后查看。
![档案管理机器人[发明专利]](https://uimg.taocdn.com/c8f51a807e21af45b207a89f.webp)
专利名称:档案管理机器人
专利类型:发明专利
发明人:赵万秋,郭成,刘哲,闻泉,边旭申请号:CN202010030632.8
申请日:20200110
公开号:CN111113367A
公开日:
20200508
专利内容由知识产权出版社提供
摘要:本发明提供了一种档案管理机器人,涉及档案管理设备的技术领域,包括控制器、自主导航移动装置、识别装置、执行装置;自主导航移动装置能够带动控制器、识别装置和执行装置在特定区域内进行移动,控制器与外部操作系统电信号连接,当控制器接收到外部操作系统的调度指令后,控制器能够控制自主导航移动装置移动至所需档案的所在位置,并且根据识别对该档案的识别信息控制执行装置对档案进行存取固定,本实施例提供的档案管理机器人是利用控制器以及自主导航移动装置实现在档案室等空间内的自主移动,不需要对库房进行任何改造,缓解现有技术中存在的需要改变库房结构,对空间的要求很高,同时也会导致投入的成本较高的技术问题。
申请人:深圳优艾智合机器人科技有限公司
地址:518000 广东省深圳市福田区华强北街道福强社区深南中路2070号中电广场大厦5层505国籍:CN
代理机构:北京超凡宏宇专利代理事务所(特殊普通合伙)
代理人:杨萌
更多信息请下载全文后查看。
![一种采用智能机器人的档案管理系统[实用新型专利]](https://uimg.taocdn.com/fbdf224a30b765ce0508763231126edb6e1a7653.webp)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 202020668120.X(22)申请日 2020.04.27(73)专利权人 济南恒大视讯科技有限公司地址 250101 山东省济南市高新区新泺大街1166号奥盛大厦3号楼601(72)发明人 宋中国 王胜涛 于洪征 朱卫国 (74)专利代理机构 济南圣达知识产权代理有限公司 37221代理人 李圣梅(51)Int.Cl.G06K 17/00(2006.01)G07G 1/00(2006.01)B25J 11/00(2006.01)B25J 9/16(2006.01)B25J 15/06(2006.01)(54)实用新型名称一种采用智能机器人的档案管理系统(57)摘要本实用新型公开了一种采用智能机器人的档案管理系统,包括:借阅存档一体机、机器人系统及密集架系统;所述借阅存档一体机包括本体结构及设置在本体结构上的触控屏及自动存取模块,所述触控屏与处理器相连,所述处理器与机器人系统通信,所述自动存取模块用于档案的临时转存;所述机器人系统接收借阅存档一体机下发的指令移动至智能密集架系统或者移动至借阅存档一体机;所述密集架系统包括密集架和设置在密集架上的RFID档案盒。
整个过程减少了人员的参与,且具有全向运动、智能抓取、自动巡线、全局定位、智能充电、自动盘点、档案数据上传等功能与特点。
权利要求书1页 说明书5页 附图9页CN 211628264 U 2020.10.02C N 211628264U1.一种采用智能机器人的档案管理系统,其特征是,包括:借阅存档一体机、机器人系统及密集架系统;所述借阅存档一体机包括本体结构及设置在本体结构上的触控屏及自动存取模块,所述触控屏与处理器相连,所述处理器与机器人系统通信,所述自动存取模块用于档案的临时转存;所述机器人系统接收借阅存档一体机下发的指令移动至智能密集架系统或者移动至借阅存档一体机;所述密集架系统包括密集架和设置在密集架上的RFID档案盒。
![一种档案管理机器人[实用新型专利]](https://uimg.taocdn.com/4a75353db14e852459fb5795.webp)
专利名称:一种档案管理机器人
专利类型:实用新型专利
发明人:于海峰,阚凤娟,曲道全,周科科,李峰申请号:CN202020528487.1
申请日:20200413
公开号:CN210551272U
公开日:
20200519
专利内容由知识产权出版社提供
摘要:本实用新型涉及一种档案管理机器人,包括AGV小车、一级升降机构、二级升降机构、平行关节机器人、取放机构、视觉识别装置,所述一级升降机构安装在AGV小车上,所述二级升降机构安装在一级升降机构上,所述平行关节机器人通过安装座滑动安装在二级升降机构上,所述视觉识别装置与取放机构安装在平行关节机器人的自由端。
本申请通过两级升降机构使机器人整体高度较低,保证了行驶过程的稳定性且增加了夹取档案的范围;通过将取放机构和视觉识别装置安装在平行关节机器人的自由端可实现对档案的扫描识别、拍照及夹取档案,结构合理且降低了成本。
申请人:橙色云设计有限公司
地址:264000 山东省烟台市莱山区黄海路9号1号楼1单元1102
国籍:CN
代理机构:烟台上禾知识产权代理事务所(普通合伙)
代理人:丁宝君
更多信息请下载全文后查看。
![一种智能档案归档机器人[实用新型专利]](https://uimg.taocdn.com/db8707b96429647d27284b73f242336c1eb93091.webp)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 202020450747.8(22)申请日 2020.03.31(73)专利权人 哈工大机器人义乌人工智能研究院地址 322000 浙江省金华市义乌市雪峰西路968号科创园十四号楼(72)发明人 胡伟萍 屠一峰 程裕宽 (74)专利代理机构 杭州杭诚专利事务所有限公司 33109代理人 尉伟敏(51)Int.Cl.B25J 19/02(2006.01)B25J 11/00(2006.01)B25J 19/04(2006.01)B25J 9/16(2006.01)G06K 17/00(2006.01)G06F 16/93(2019.01)(54)实用新型名称一种智能档案归档机器人(57)摘要本实用新型涉及文件存储领域,尤其涉及一种智能档案归档机器人。
它包括框架本体、标有编码的档案及用于存放档案的文件柜,档案上的编码与文件柜的位置一一对应,框架本体上设有抓取装置,抓取装置上设有用于识别档案上编码的识别装置;框架本体上还设有可移动的收发器,收发器将识别编码后的档案自动移动到对应的文件柜中。
本实用新型,具备档案文件的编码识别、抓取、传递、定位、存放等功能,既能配合档案室的电动密集柜,也可以配合开放式文件柜作业进行档案归档作业。
权利要求书1页 说明书4页 附图7页CN 212265883 U 2021.01.01C N 212265883U1.一种智能档案归档机器人,其特征是,包括框架本体、标有编码的档案及用于存放档案的文件柜,档案上的编码与文件柜的位置一一对应,框架本体上设有用于抓取档案的抓取装置,抓取装置上设有用于识别档案上编码的识别装置;框架本体上还设有可移动的收发器,收发器将识别编码后的档案自动移动到对应的文件柜中。
2.根据权利要求1所述的一种智能档案归档机器人,其特征是,所述抓取装置包括放置台,放置台的上方设有安装板及驱动装置,安装板上设有用于抓取档案的真空吸盘。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910166194.5
(22)申请日 2019.03.06
(71)申请人 厦门驿创数字科技有限公司
地址 361022 福建省厦门市软件园三期诚
毅北大街8号401-02单元
(72)发明人 常云兰 叶华阳
(74)专利代理机构 重庆市信立达专利代理事务
所(普通合伙) 50230
代理人 包晓静
(51)Int.Cl.
B25J 11/00(2006.01)
B25J 19/02(2006.01)
B25J 9/00(2006.01)
(54)发明名称
档案管理机器人
(57)摘要
本发明属于档案管理技术领域,公开了档案
管理机器人,包括移动机构、夹持机构、执行驱动
模块和智能系统,夹持组件包括气动手指和两个
夹持臂,两个夹持臂安装在所述气动手指上,两
个夹持臂的底侧面均设有用于清扫灰尘的刷毛;
升降组件上设有吸尘机构,吸尘机构包括用于吸
入灰尘的软喉管;智能系统包括档案记录模块、
预先除尘模块、除尘设定模块、控制模块,控制模
块用于根据执行驱动模块的工作结果控制档案
记录模块记录对应的信息,以及根据预先除尘模
块和除尘设定模块发出的指令分别控制执行驱
动模块发出对应的除尘执行信号。
本发明以解决
现有机器人进行档案管理时不能给档案以及档
案柜除尘的问题。
权利要求书2页 说明书8页 附图3页CN 109866233 A 2019.06.11
C N 109866233
A
权 利 要 求 书1/2页CN 109866233 A
1.档案管理机器人,包括移动机构、夹持机构、执行驱动模块和智能系统,所述移动机构用于带动机器人整体移动,所述夹持组件用于取放档案文件,所述执行驱动模块用于控制所述移动机构和夹持机构工作,所述智能系统用于控制所述执行驱动模块工作以及实时记录档案管理信息,其特征在于,所述夹持机构包括升降组件、第一气缸和夹持组件,所述升降组件竖直设于所述移动组件上,所述第一气缸垂直设置在所述升降组件的移动部上;所述第一气缸的伸缩端连接有旋转气缸,所述旋转气缸的输出端与所述第一气缸的伸缩端相互平行,所述旋转气缸的输出端连接所述夹持组件;所述夹持组件包括气动手指和两个夹持臂,两个所述夹持臂安装在所述气动手指上,两个所述夹持臂的底侧面均设有用于清扫灰尘的刷毛;所述升降组件上设有吸尘机构,所述执行驱动模块还用于控制所述吸尘机构,所述吸尘机构包括用于吸入灰尘的软喉管,所述软喉管自由端的管口安装在所述夹持臂上;所述移动机构上设有位于两个所述夹持臂下方的置物台;
所述智能系统包括:
档案记录模块,用于记录各档案文件的档案名称、存档地址、入库时间、当前在存状态以及出借档案的出库时间;
预先除尘模块,用于在存放档案前发出给对应的档案柜进行除尘的指令;
除尘设定模块,与所述档案记录模块连接,所述除尘设定模块预设有档案存放时段,所述档案存放时段根据最新的入库时间起算,当所述除尘设定模块判断出档案存放的时间超过所述档案存放时段时,所述除尘设定模块用于发出给对应的档案及档案柜进行除尘的指令;
控制模块,分别连接所述档案记录模块、预先除尘模块、除尘设定模块和执行驱动模块,用于根据执行驱动模块的工作结果控制档案记录模块记录对应的信息,以及根据预先除尘模块和除尘设定模块发出的指令分别控制执行驱动模块发出对应的除尘执行信号。
2.根据权利要求1所述的档案管理机器人,其特征在于,所述移动机构安装有垂直设置的第二气缸,所述执行驱动模块还用于控制所述第二气缸工作,所述第二气缸的伸缩端连接所述置物台。
3.根据权利要求1所述的档案管理机器人,其特征在于,所述升降组件的移动部还连接有位于所述旋转气缸下方的第一滑轨,所述第一滑轨与所述升降组件相互垂直;所述第一滑轨上设有第一滑块,所述旋转气缸连接在所述第一滑块上,所述旋转气缸在所述第一气缸的作用下沿所述第一滑轨移动。
4.根据权利要求1所述的档案管理机器人,其特征在于,所述升降组件包括步进电机、丝杆和第二滑轨,所述步进电机安装在所述第二滑轨的顶部,所述第二滑轨竖直连接在所述移动机构上;所述第二滑轨上设有第二滑块,所述第二滑块上固定有丝块,所述步进电机通过联轴器和所述丝杆连接,所述丝块设置在所述丝杆上,所述丝块在步进电机带动丝杆转动时沿第二滑轨移动,所述第一气缸安装在所述丝块上。
5.根据权利要求1-4任一项所述的档案管理机器人,其特征在于,所述智能系统还包括归还定时模块和短信发送模块,所述档案记录模块还用于记录出借人员的电话号码,所述归还定时模块和短信发送模块均连接所述档案记录模块,且所述归还定时模块连接所述短信发送模块;
所述归还定时模块,其预设档案归还时段,所述档案归还时段根据最新的出库时间起
2。