第2章_短基线水声定位系统(SBL)
- 格式:ppt
- 大小:2.35 MB
- 文档页数:50
一种用于短基线水声定位的改进模型
张玉册;梁开龙;朱广成
【期刊名称】《海洋测绘》
【年(卷),期】2002(22)2
【摘要】由于水下声速确定的不准确,用传统的短基线定位系统(SBL)来确定水下信标的位置通常是不准确的,主要原因是声速受环境的影响.本文给出了一个改进的SBL系统模型.这种模型用欧氏几何的原理来更有效、收敛更快地解算信标的位置函数,获得准确的水下信标的位置.最后用担负钻探任务的船只进行模拟验证SBL系统改进模型的有效性.
【总页数】3页(P30-32)
【作者】张玉册;梁开龙;朱广成
【作者单位】海军大连舰艇学院海洋测绘系,辽宁大连,116018;海军大连舰艇学院海洋测绘系,辽宁大连,116018;海军大连舰艇学院海洋测绘系,辽宁大连,116018【正文语种】中文
【中图分类】TB5
【相关文献】
1.一种适用于长基线水声定位系统的声线修正方法 [J], 王燕;梁国龙
2.短基线水声定位系统的后置处理 [J], 丁育中;刘伯胜;梁国龙
3.基于FPGA的短基线水声定位接收机设计 [J], 王楠;韩荣荣;雷亚辉
4.短基线水声定位精度仿真研究 [J], 杨贵海;李兵;马锦垠
5.一种适用于水下垂向运动目标的长基线水声定位方法 [J], 张旭;孙翱;韩旭;辛健
因版权原因,仅展示原文概要,查看原文内容请购买。
一、水声定位技术简介自从1912年在美国出现了第一台水声测深仪以后,开始有了水声助航设备。
二战中,对水下目标的探测和测量受到了重视,并在战后得到了迅速的发展。
1958年,美国华盛顿大学应用物理实验室在达波湾建成了三维坐标跟踪水下武器靶场。
这种水下定位跟踪技术在六十年代后期得到广泛应用,成为鱼雷靶场的主要测试方法。
迄今为止,国内外水下武器靶场使用的水下定位跟踪系统有多种类型,按其安装方式可分为固定式跟踪系统、活动式(船载)跟踪系统和轻便式跟踪系统。
固定式跟踪系统的水下测量设备大多数固定在海底,其范围大、费用高,只能在固定海区使用;活动式跟踪系统的全部设备都固定安装在活动平台上,试验时随活动平台开往试验海区;轻便式跟踪系统的体积和重量相对较小,可以随时布放和回收,并可通过飞机、车辆和船只从一个试验区运送到另一个试验区。
这三种水下定位跟踪系统虽然在结构上有较大差别,但在原理上均是依赖于几何原理的水声学定位方法。
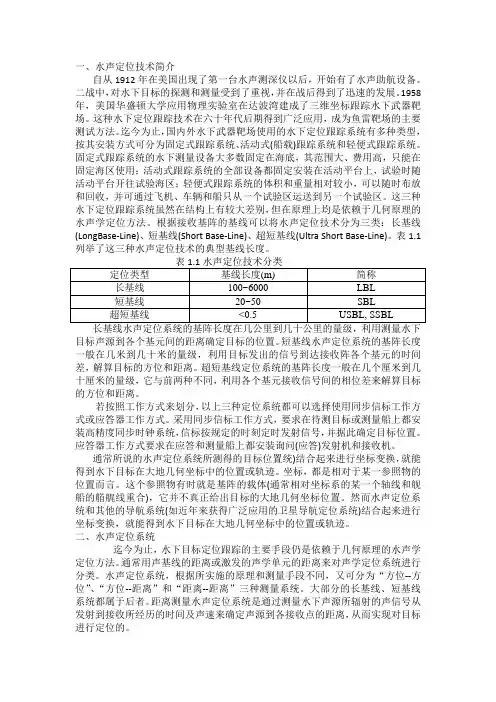
根据接收基阵的基线可以将水声定位技术分为三类:长基线(LongBase-Line)、短基线(Short Base-Line)、超短基线(Ultra Short Base-Line)。
表1.1列举了这三种水声定位技术的典型基线长度。
目标声源到各个基元间的距离确定目标的位置。
短基线水声定位系统的基阵长度一般在几米到几十米的量级,利用目标发出的信号到达接收阵各个基元的时间差,解算目标的方位和距离。
超短基线定位系统的基阵长度一般在几个厘米到几十厘米的量级,它与前两种不同,利用各个基元接收信号间的相位差来解算目标的方位和距离。
若按照工作方式来划分,以上三种定位系统都可以选择使用同步信标工作方式或应答器工作方式。
采用同步信标工作方式,要求在待测目标或测量船上都安装高精度同步时钟系统,信标按规定的时刻定时发射信号,并据此确定目标位置。
应答器工作方式要求在应答和测量船上都安装询问(应答)发射机和接收机。
通常所说的水声定位系统所测得的目标位置统)结合起来进行坐标变换,就能得到水下目标在大地几何坐标中的位置或轨迹。

第一章绪论1.名词解释(1)海洋测绘/海洋测绘学:研究海洋定位、测定海洋大地水准面和平均海面、海底和海面地形、海洋重力、海洋磁力、海洋环境等自然和社会信息的地理分布,及编制各种海图的理论和技术的学科。
(2)海洋:海洋是地球表面包围大陆和岛屿的广大连续的含盐水域,是由作为海洋主体的海水水体、溶解和悬浮其中的物质、生活于其中的海洋生物、邻近海面上空的大气、围绕海洋周缘的海岸和海底等部分组成的统一体。
(3)海岸带:海陆交互的地带,其外界应在15~20m等深浅一带,这里既是波浪、潮汐对海底作用有明显影响的范围,也是人们活动频繁的区域;其内界,海岸部分为特大潮汐(包括风暴潮)影响的范围,河口部分则为盐水入侵的上界。
(4)海岸线:近似于多年平均大潮、高潮的痕迹所形成的水陆分界线。
(5)潮上带(海岸):高潮线以上狭窄的陆上地带,大部分时间里裸露于海水面之上,仅在特大风暴潮时才被淹没,故又称为潮上带。
⑹潮间带(海滩):高低潮之间的地带,高潮时被水淹没,低潮时露出水面,故又称为潮间带。
(7)潮下带(水下岸坡):低潮线以下直到波浪作用所能到达的海底部分,又称为潮下带。
(8)大陆边缘:大陆与大洋连接的边缘地带,也是大陆与大洋之间的过渡带。
通常由大陆架、大陆坡、大陆隆及海沟组成。
(9)大陆架:大陆周围被海水淹没的浅水地带,是大陆向海洋底的自然延伸,其范围是从低潮线起以极其平缓的坡度延伸到坡度突然变大的地方(大陆架外缘)为止。
(10)内海:亦称内水,指领海基线以内的水域。
(11)领海:沿海国主权之下的、与其陆地或内海相邻接的一定宽度的水域。
(12)领海基线:沿海国家测算领海宽度的起算线。
(13)毗连区:一种毗连国家领海并在领海外划定的一定宽度、供沿海国行使关于海关、财政、卫生和移民等方面管制权的一个特定区域。
(14)大陆专属经济区:领海以外并邻接领海,介于领海与公海之间,具有特定法律制度的国家管辖水域。
(15)绝对精度(点位精度):指确定的点相对于某一参考点或坐标系的可靠性,属于外符合精度。

in tegrated positi oning system 卫星-声学组合定位系统satellite-acoustics卫星-声学组合定位系统是将卫星接收机接口和声学定位系统接口与计算机连接,并相应连接其他定位设备所组成的定位系统。
产品种类:1基于GPS孚标的水下长基线(LBL)定位系统1)定位精度与DGPS精度相当;2)定位范围20-100平方公里2高精度短基线(SBL)和超短基线(USBL)定位系统1 )工作半径大于4公里2 )定位精度优于1%斜距3 )使用方便灵活3水下声学应答器/释放器可工作在水下1000米/4000米/8000米4水声通信链通信速率240-2400bps5根据用户需求的水下声学定位系统主要应用领域:海洋工程、水下考古、海洋资源勘探与开发、近岸工程、水下反恐、水下RUV/UUV/AUX定位与导航、蛙人/潜员水下定位与导航。
GAPS型全球声学定位系统仪器介绍:该系统是一套无需标定的便携式超高精度超短基线(USBL系统,它将惯性导航与水下声学定位完美地结合在一起,并融入了GPS定位技术。
这使它能最大限度地满足水面和水下定位及导航的需要。
可同时对多个水下目标(ROV AUV拖鱼)精确定位,并可提供高精度的姿态及航向数据。
即使在GPS数据中断或有跳点的情况下,仍不丢失定位数据。
在系统的有效作用距离内,不管水深多大,均可保持水下目标定位数据的高速更新输岀。
技术规格:水下定位精度:斜距的0.2%;有效距离:4000m ;覆盖范围:200o(声学阵下方);工作频率:20〜30kHz。
法国IXSEA GAPS全球声学定位惯性导航系统♦惯性导航和水下声学宦位的完美组合GAPS是一套勿需标定的便携式、即插即用趙短基融声学宦位(USBL)制性导航磁它将高蓿度光纤紀螺惯性导就技术与水下声学址位究芙地结合在 -曲年融人了GF5测駁技术,斎逾可臥同时追踪爹个水F目标,这愎用妄須途的CAPS能呈大琨度她满足海jE j和水卜宦位及导航的要求"• 水下声学定位的一场革命传统的USBL系统由于涉及的外弼传感器多,如罗经、运动传感器、声学换能器等,在系统T作之前,等传感器之间的相对偏移虽需要宿确的测虽,系统还需要进厅海I.杯定。
第一章绪论1. 名词解释(1) 海洋测绘/海洋测绘学:研究海洋定位、测定海洋大地水准面和平均海面、海底和海面地形、海洋重力、海洋磁力、海洋环境等自然和社会信息的地理分布,及编制各种海图的理论和技术的学科。
(2) 海洋:海洋是地球表面包围大陆和岛屿的广大连续的含盐水域,是由作为海洋主体的海水水体、溶解和悬浮其中的物质、生活于其中的海洋生物、邻近海面上空的大气、围绕海洋周缘的海岸和海底等部分组成的统一体。
(3) 海岸带:海陆交互的地带,其外界应在15~20m等深浅一带,这里既是波浪、潮汐对海底作用有明显影响的范围,也是人们活动频繁的区域;其内界,海岸部分为特大潮汐(包括风暴潮)影响的范围,河口部分则为盐水入侵的上界。
(4) 海岸线:近似于多年平均大潮、高潮的痕迹所形成的水陆分界线。
(5) 潮上带(海岸):高潮线以上狭窄的陆上地带,大部分时间里裸露于海水面之上,仅在特大风暴潮时才被淹没,故又称为潮上带。
(6) 潮间带(海滩):高低潮之间的地带,高潮时被水淹没,低潮时露出水面,故又称为潮间带。
(7) 潮下带(水下岸坡):低潮线以下直到波浪作用所能到达的海底部分,又称为潮下带。
(8) 大陆边缘:大陆与大洋连接的边缘地带,也是大陆与大洋之间的过渡带。
通常由大陆架、大陆坡、大陆隆及海沟组成。
(9) 大陆架:大陆周围被海水淹没的浅水地带,是大陆向海洋底的自然延伸,其范围是从低潮线起以极其平缓的坡度延伸到坡度突然变大的地方(大陆架外缘)为止。
(10) 内海:亦称内水,指领海基线以内的水域。
(11) 领海:沿海国主权之下的、与其陆地或内海相邻接的一定宽度的水域。
(12) 领海基线:沿海国家测算领海宽度的起算线。
(13) 毗连区:一种毗连国家领海并在领海外划定的一定宽度、供沿海国行使关于海关、财政、卫生和移民等方面管制权的一个特定区域。
(14) 大陆专属经济区:领海以外并邻接领海,介于领海与公海之间,具有特定法律制度的国家管辖水域。
水声定位技术与发展趋势综述1 引言地球表面积的71%是海洋,海洋里蕴藏着丰富的生物和矿物质资源,是人类今后生存和发展的第二个空间。
而水下探测设备则是人类开发海洋的重要帮手,更是海军和民用航海事业不可缺少的组成部分。
水声定位系统由水下声标、船上的声学接收、发射设备组成的定位系统,是水下探测设备的重要组成部分,研究水声定位技术意义重大。
2 水声定位技术迄今为止,水下目标定位跟踪的主要手段仍是依赖于几何原理的水声学定位方法。
通常用声基线的距离或激发的声学单元的距离来对声学定位系统进行分类。
水声定位系统,根据所实施的原理和测量手段不同,又可分为“方位--方位”、“方位--距离”和“距离--距离”三种测量系统。
大部分的长基线、短基线系统都属于后者。
距离测量水声定位系统是通过测量水下声源所辐射的声信号从发射到接收所经历的时间及声速来确定声源到各接收点的距离,从而实现对目标进行定位的。
根据接收基阵的基线可以将水声定位技术分为三类:长基线(LongBase-Line)、短基线(Short Base-Line)、超短基线(Ultra Short Base-Line),另外还有一种组合定位系统,下面作详细介绍。
2.1超短基线定位系统(SSBL/USBL)超短基线定位系统(SSBL/USBL)的声基阵由集中安装在一个收发器中的所有声单元 (t>3)组成。
声单元之间的相互位置精确测定,组成声基阵坐标系,声基阵坐标系与船的坐标系之间的关系要在安装时精确测定。
包括位置和姿态(声基阵的安装偏差角度:横摇、纵摇和水平旋转)。
系统通过测定声单元的相位差来确定换能器到目标的方位(垂直和水平角度)。
换能器与目标的距离通过测定声波传播的时间,再用声速剖面修正波束线确定距离。
超短基线定位系统的示意图见图1。
图1 超短基线定位不意图超短基线定位系统的优点是整个系统的构成简单,操作方便,不需要组建水下基线阵,测距精度高。
超短基线定位系统的缺点是需要做大量的校准工作。

兵工自动化 2013-12Ordnance Industry Automation 32(12) ·46·doi: 10.7690/bgzdh.2013.12.013水下机器人定位方法综述商承超1,2,王伟2,谢广明2,罗文广1(1. 广西科技大学电气与信息工程学院,广西柳州 545006;2. 北京大学工学院,北京 100871)摘要:机器人定位是指通过机器人传感系统实时获得其所在的位置和航向信息,是移动机器人完成复杂实际任务的基础。
针对水中机器人,介绍了基于水声、基于GPS和基于概率等几种典型的水下定位方法。
分别描述了这些方法的实现原理,并分析了它们的特点和存在的问题。
最后,展望了该方向今后的发展趋势和应用前景。
关键词:水下机器人;定位方法;水声定位;GPS定位;概率定位中图分类号:TP242 文献标志码:ASurvey of Localization Methods for Underwater RobotsShang Chengchao1,2, Wang Wei2, Xie Guangming2, Luo Wenguang1(1. College of Electric & Information Engineering, Guangxi University of Science & Technology, Liuzhou 545006, China;2. College of Engineering, Peking University, Beijing 100871, China)Abstract: Robot localization means that the robot obtains its position and heading information through its sensor systems in real time, which is the start point of complex real applications for mobile robots. In this paper, for underwater robots, three typical localization methods including acoustic localization, GPS-based localization and probabilistic localization are introduced. Their implementation principles are described and their advantages and existing problems are analyzed, respectively. Finally, the direction of future development and application prospect are discussed.Key words: underwater robot; localization method; acoustic localization; GPS-based localization; probabilistic localization0 引言移动机器人定位是指机器人通过自身感知系统从所在环境获取与定位相关的信息数据,然后再经过一定的算法处理,进而对机器人当前的位姿(位置和航向)进行准确估计的过程。
简答题1.3S技术全球定位系统(Global Positioning System ,GPS)美国发展的新⼀代卫星导航和定位的军事系统。
遥感(Remote Sensing ,RS)不接触物体本⾝,⽤传感器收集⽬标物的电磁波信息,经处理、分析后,识别⽬标物,揭⽰其⼏何、物理特性和相互联系及其变化规律的科学技术。
地理信息系统(Geographic Information System ,GIS)在计算机软件和硬件⽀持下,把各种地理信息按照空间分布及属性以⼀定的格式输⼊、存储、检索、显⽰和综合分析应⽤的技术系统。
其中GPS⽤于实时、快速地提供⽬标的空间位置,RS⽤于实时、快速地提供⼤⾯积地表物体及其环境的⼏何、物理信息和各种变化,GIS是多种来源的时空数据的综合处理分析和应⽤平台。
应⽤:在经济发展的相关领域中进⾏相应的测绘⼯作,制成各种地图和建⽴相应的地理信息系统,供规划、设计、施⼯、管理和决策使⽤。
在国防建设和现代战争中,可持续、实时地提供战场环境,为作战指挥和武器的定位与制导提供测绘保障。
在科学研究中是测定地球动态变化,研究地壳运动及其机制的重要⼿段,同时还可⽤于研究地球内部构造、环境变化、资源勘探、灾害预测和防治等。
2.⼤地测量学的基本任务(1)建⽴和维护⾼精度全球和区域性⼤地测量系统与⼤地测量参考框架;(2)获取空间点位置的静态和动态信息;(3)测定和研究地球形状⼤⼩、地球外部重⼒场及其随时间的变化;(4)测定和研究全球和区域性地球动⼒学现象,包括地球⾃转与极移、地球潮汐、板块运动与地壳形变以及其他全球变化;(5)研究地球表⾯观测量向椭球⾯和平⾯的投影变换及相关的⼤地测量计算问题;(6)研究新型的⼤地测量仪器和⼤地测量⽅法;(7)研究空间⼤地测量理论和⽅法;(8)研究⽉球和⾏星⼤地测量理论和⽅法,研究⽉球或⾏星探测器定位、定轨和导航技术,构建⽉球或⾏星坐标参考系统和框架,探测⽉球和⾏星重⼒场。
基于虚拟仪器的超短基线水声定位系统虚拟仪器技术(Virtual Instrumentation,VI)是指以计算机为核心的仪器与测量系统(硬件和软件)的设计方案,该技术通过软件编程的方式,实现仪器硬件控制、信号处理、仪器测量、数据采集等多种功能集成于一个仪器系统中。
基于虚拟仪器的超短基线水声定位系统(Ultra-short baseline Acoustic Positioning System,USBL)是一种通过水声信号实现目标定位的仪器系统,具有定位精度高、实时性好和使用灵活等优点。
虚拟仪器的超短基线水声定位系统由测量设备和数据处理系统两部分组成。
测量设备包括超短基线水声测距系统、目标跟踪系统和船舶姿态传感器三部分。
超短基线水声测距系统由一个发射器和多个接收器组成,其基本原理是通过发射出的水声信号,在目标位置处被接收器接收到,并记录下信号传播的时间。
测量设备中的目标跟踪系统可以实时记录目标的位置和运动状态,船舶姿态传感器可以实时记录船舶姿态和位置信息。
数据处理系统主要由计算机和虚拟仪器软件构成。
虚拟仪器软件根据接收到的信号和目标位置信息,计算出目标与船舶的距离和方位角等实时定位数据。
这些数据可以通过计算机的显示屏或者数据接口输出给用户使用。
在数据处理过程中,虚拟仪器软件会对信号进行滤波、去噪、补偿等处理,以提高定位精度和可靠性。
虚拟仪器的超短基线水声定位系统主要应用于海洋勘探、船舶导航、海洋救援等领域。
其中,海洋勘探中的水下生物调查、环境监测和地形测量等任务需要对海底目标进行定位和跟踪。
而船舶导航和海洋救援中,则需要对周围的船只和人员进行定位和跟踪。
虚拟仪器的超短基线水声定位系统相较于传统的超短基线水声定位系统具有更高的定位精度和更好的实时性。
而且,虚拟仪器软件可以根据用户的需求进行修改和开发,使得系统更具有灵活性和可扩展性。
因此,虚拟仪器的超短基线水声定位系统有着广泛的应用前景,可以满足研究者和工程师在海洋科学、航海技术和海洋工程方面的需求。
Value Engineering0引言众所周知,海洋所蕴含的自然资源是地球上最丰富的但同时也是人类目前探索最少的地方。
随着人类在利用海洋和开发海洋上的投入不断增大,自主水下航行器(AUV)引起了越来越多的关注[1],特别是在海洋石油勘探开发领域得到了快速发展。
AUV是能够在水下自主航行、自动控制、并能按照程序预先规划路径自主完成预定任务的水下集成系统。
导航定位技术是AUV的关键技术之一,高精度水下导航定位技术对AUV的安全航行和高效率完成任务具有决定性的作用。
由于无线电信号在水中迅速衰减,AUV无法借助无线电导航系统实现水下远距离、大范围的准确定位,卫星导航定位系统在水下不可用是AUV水下导航定位面临的主要技术挑战之一。
在不使用声学基线定位系统的情况下,AUV在水下主要依靠自身搭载的罗经、多普勒计程仪(Doppler Velocity Logger,DVL)或惯性导航系统提供的各类导航信息,通过航位推算模式实现水下导航定位。
惯性导航/航位推算方法精度受传感器本身测量精度影响,会随时间迅速积累。
在DVL锁定海底并且能够提供有效对地速度辅助导航的情况下,惯性导航/航位推算的导航误差一般为航行距离的0.5-2%,如果使用高精度的惯性导航设备,导航误差能够优于航行距离的0.1%。
当在水面时,AUV可以通过GNSS(Global Navigation Satellite System)获得的绝对位置来实时修正惯性导航系统误差。
但是定时上浮接收GNSS信号来实现对惯性导航误差的校正在实际应用过程中往往是不现实的,尤其在深水调查作业中。
在过去的二十年间,AUV水下导航定位技术研究取得了实质性的进展。
以视觉导航和地磁匹配导航技术为代表的非传统导航方式逐步开始在水下导航中得到应用,并取得了一定的成果。
除此之外,用于解决机器人导航定位的同步定位与地图构建(Simultaneous Localization and Mapping,SLAM)算法技术日渐成熟,在水下导航定位方面的应用研究也取得了一定的理论和实践成果[2]。
超短基线定位系统水声应答器的设计与实现的开题报告1. 选题背景和意义:水声通信技术在海洋领域中具有重要的应用价值,其中水声定位技术是水声通信领域中的一个重要分支。
超短基线定位系统是一种用于水下物体精确定位的系统,其优点是定位精度高、系统鲁棒性强等,因此在海底资源勘探和航运领域等具有广泛的应用前景。
本课题旨在设计和实现一种基于超短基线定位系统的水声应答器,为水声通信领域的技术发展做出一定的贡献。
2. 研究内容和目标:本课题的研究目标是设计和实现一种基于超短基线定位系统的水声应答器,通过对系统原理和水声信号处理技术等方面的研究,实现对水下物体的精确定位。
具体研究内容如下:(1) 超短基线定位系统的原理和相关技术研究;(2) 水声信号处理技术研究,包括水声信号的发射与接收、信号去噪和信号增强等;(3) 基于超短基线定位系统的水声应答器设计和实现。
3. 研究方法和步骤:本课题将采用以下研究方法和步骤:(1) 对超短基线定位系统的原理和相关技术进行深入研究,包括定位算法、系统结构等;(2) 对水声信号处理技术进行深入研究,包括信号发射与接收、滤波、去噪和信号增强等;(3) 根据研究结果,设计一个基于超短基线定位系统的水声应答器,并进行模拟和实现;(4) 对设计的应答器进行测试和性能分析,评估其定位精度和鲁棒性等指标。
4. 论文组织结构:本论文的组织结构将以以下方式进行:第一章绪论1.1 研究背景和意义1.2 研究目标和意义1.3 研究方法和步骤1.4 论文组织结构第二章超短基线定位系统的原理和技术2.1 超短基线定位系统的原理2.2 超短基线定位系统的技术研究第三章水声信号处理技术研究3.1 水声信号发射与接收3.2 滤波技术3.3 去噪技术3.4 信号增强技术第四章基于超短基线定位系统的水声应答器设计与实现4.1 应答器系统结构设计4.2 应答器模块设计4.3 应答器系统实现第五章应答器性能测试与分析5.1 测试方案设计5.2 实验结果分析和评估第六章结论与展望6.1 主要研究成果总结6.2 不足之处和未来工作展望参考文献5. 预期结果及对学术界和工业界的贡献:本研究预期实现一个基于超短基线定位系统的水声应答器,并对其进行性能测试和分析,从而达到以下预期结果:(1) 实现水下物体的精确定位;(2) 实现系统信号处理技术,提高应答器的抗干扰能力和定位精度;(3) 提高水声通信技术在海洋领域中的应用效果;(4) 对水声通信领域的技术发展做出一定的贡献。