合成孔径雷达点目标成像仿真
- 格式:pdf
- 大小:699.07 KB
- 文档页数:3
合成孔径雷达的动目标成像与检测摘要动目标的成像与检测是合成孔径雷达(SAR)领域中的研究热点之一,不论是在军事上还是在民用上都有很重要的意义。
目前,世界上很多国家都在积极发展动目标的检测和成像技术,研制先进的动目标检测和成像雷达系统,努力寻找各种高效、实用的动目标检测和成像方法。
本文主要研究了单通道SAR的动目标检测和成像技术,旨在提高动目标的检测概率,获取动目标的运动参数并对其精确成像。
主要工作如下:1、分析了SAR的运动目标回波模型,探讨了目标运动引起的多普勒质心变化,以及这些变化对常规SAR成像结果的影响。
2、对SAR的动目标检测和成像原理做了介绍,分析了步进频信号和线性调频信号的一维距离像,对步进频信号的一维距离像进行了重点分析。
3、对信号进行仿真,对不同参数的一维距离像进行比较,分析仿真结果。
关键词:合成孔径雷达,动目标检测和成像,一维距离像Moving Targets Detection and Imaging of SARAbstractMoving Targets Detection and Imaging (MTDI) is hot in Synthetic Aperture Radar (SAR) research and plays an important role in both martial field and civilian field. Now many countries in the world are making great efforts to develop advanced MTDI systems and explore high efficient MTDI algorithms. The key techniques of MTDI are studied in this dissertation for getting high detection probability, accurate parameters and good images of moving targets.The major work of this dissertation is as follows:1. After analyzing the model of moving targets’ echoes, the change s of Doppler history are discussed in detail, which are due to targets’ moving. It is analyzed that the influence of the changes on the conventional SAR imaging.2. In this paper, the principle of MTDI are introduced. At the same time, we analyze the High Range Resolution Profile of the step frequency signal and the linear frequency modulation signal. The High Range Resolution Profile of the step frequency signal is more important in our paper.3.We will simulation ,then change the parameters of the signal and analyse the difference between them.Key words:Synthetic Aperture Radar, Moving Targets Detection and Imaging, High Range Resolution Profile.目录1 绪论 (1)1.1 合成孔径雷达的动目标检测和成像的意义 (1)1.2 合成孔径雷达研究及动态 (2)1.3本文的主要内容 (5)2 SAR动目标检测和成像原理 (6)2.1 SAR理论模型和成像原理 (6)2.2 运动目标的回波信号分析 (10)2.3目标运动引起的多普勒质心变化及其对常规SAR成像的影响 (12)2.3.1 目标运动引起的多普勒质心变化 (13)2.3.2动目标多普勒质心变化对常规SAR成像的影响 (14)2.4本章小结 (14)3 合成孔径雷达动目标的一维距离像 (15)3.1 频率步进脉冲信号距离成像原理分析 (15)3.2 频率步进雷达发射信号波形及设计准则 (18)3.2.1 频率步进波形 (18)3.2.2 频率步进信号相关参量设计 (19)3.3 一个步进频信号的一维距离像 (24)3.4仿真结果 (27)3.4.1 第一组参数实验数据及结果 (27)3.4.2 第二组参数实验数据及结果 (29)3.4.3 第三组参数实验数据及结果 (31)3.4.4 第四组参数实验数据及结果 (32)3.4.5 第五组参数实验数据及结果 (34)3.4.6 对实验结果的分析 (35)3.4.7 参考程序 (36)3.5 总结 (38)4 结束语 (39)参考文献 (40)致谢 (42)1 绪论1.1 合成孔径雷达的动目标检测和成像的意义检测运动目标是现代雷达要完成的功能之一。
雷达点目标成像1.实验要求自行设定参数,使用matlab 软件,对合成孔径雷达点目标成像进行仿真。
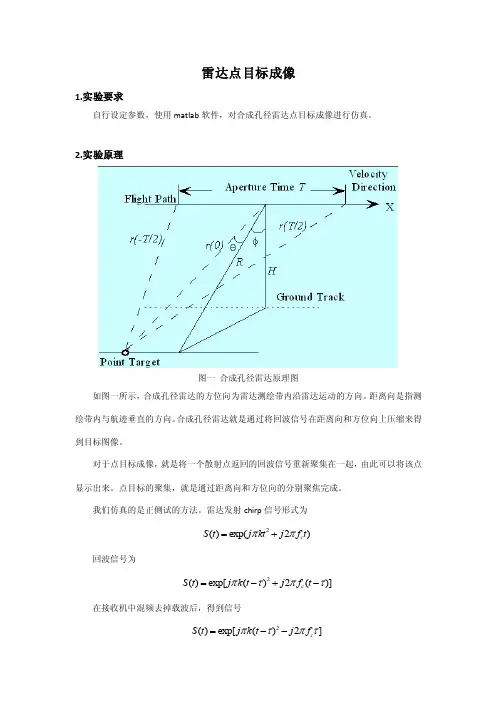
2.实验原理图一 合成孔径雷达原理图如图一所示,合成孔径雷达的方位向为雷达测绘带内沿雷达运动的方向。
距离向是指测绘带内与航迹垂直的方向。
合成孔径雷达就是通过将回波信号在距离向和方位向上压缩来得到目标图像。
对于点目标成像,就是将一个散射点返回的回波信号重新聚集在一起,由此可以将该点显示出来。
点目标的聚集,就是通过距离向和方位向的分别聚焦完成。
我们仿真的是正侧试的方法。
雷达发射chirp 信号形式为2()exp(2)c S t j kt j f t ππ=+回波信号为2()exp[()2()]c S t j k t j f t πτπτ=-+-在接收机中混频去掉载波后,得到信号2()exp[()2]c S t j k t j f πτπτ=--可得信号的距离向信号形式为2exp[(2/)]j k t r c π-方位向信号形式为exp[4/]c j f r c π-其中()r t =当v t R 时有2()()2vt r t R R ≈+,知回波信号在方位向上也是线性调频信号,其调频率为22v Rλ,λ为载波波长。
对于成像算法,我们采用经典的距离多普勒算法,即SD 算法。
他的基本思想是基本思想是将二位处理分解为两个一维处理的级联方式,即分别压缩距离向和方位向。
由于雷达的飞行线路接近直线,所以方位向和距离向相互有影响,要对数据进行徙动校正。
但是由于机载SAR 飞行范围小,距离弯曲量很小,故可以不用考虑徙动校正。
SD 算法的具体流程图如图二所示。
图二 SD 算法的具体流程图4.实验过程参数设置:飞机飞行高度:10000m下视角:45度飞机的飞行速度:100m/s合成孔径时间:1sPRF :500HzK :113010⨯Hz/s脉冲宽度:10us载波频率: 10510Hz ⨯回波点阵大小:501X501对数据进行距离向压缩,得到图一。

SAR图像点目标仿真报告徐一凡1 SAR原理简介合成孔径雷达(Synthetic Aperture Radar .简称SAR)是一种高分辨率成像雷达技术。
它利用脉冲压缩技术获得高的距离向分辨率.利用合成孔径原理获得高的方位向分辨率.从而获得大面积高分辨率雷达图像。
SAR回波信号经距离向脉冲压缩后.雷达的距离分辨率由雷达发射信号带宽决定:2rrCBρ=.式中rρ表示雷达的距离分辨率.rB表示雷达发射信号带宽.C表示光速。
同样.SAR回波信号经方位向合成孔径后.雷达的方位分辨率由雷达方位向的多谱勒带宽决定:aaavBρ=.式中aρ表示雷达的方位分辨率.aB表示雷达方位向多谱勒带宽.av表示方位向SAR平台速度。
在小斜视角的情况下.方位分辨率近似表示为2aDρ=.其中D为方位向合成孔径的长度。
2 SAR的几何关系雷达位置和波束在地面覆盖区域的简单几何模型如图1所示。
此次仿真考虑的是正侧视的条带式仿真.也就是说倾斜角为零.SAR波束中心和SAR平台运动方向垂直的情况。
图1 雷达数据获取的几何关系建立坐标系XYZ如图2所示.其中XOY平面为地平面;SAR平台距地平面高H.以速度V 沿X轴正向匀速飞行;P点为SAR平台的位置矢量.设其坐标为(x,y,z); T点为目标的位置矢量.设其坐标为(,,)T T Tx y z;由几何关系.目标与SAR平台的斜距为:222()()()T T TR PT x x y y z z==-+-+-(1)由图可知:0,,0T yz H z ===;令x v s =⋅.其中v 为平台速度.s 为慢时间变量(slow time ).假设T x vs =.其中s 表示SAR 平台的x 坐标为T x 的时刻;再令22T r H y =+.r 表示目标与SAR 的垂直斜距.重写(1)式为:2220(;)()PT R s r r v s s = =+⋅- (2)(;)R s r 就表示任意时刻s 时.目标与雷达的斜距。
合成孔径雷达点目标成像仿真简介合成孔径雷达(Synthetic Aperture Radar, SAR)是一种使用微波信号进行成像的遥感技术。
合成孔径雷达能够在任何天气条件下进行有效的地表观测,对于高分辨率的地表特征提供了重要的数据支持。
点目标成像仿真是合成孔径雷达领域中的重要研究内容,它能够模拟传统目标成像算法在合成孔径雷达成像过程中的性能和效果。
本文将介绍合成孔径雷达点目标成像仿真的基本原理和步骤,并给出具体的操作方法和代码实现。
基本原理合成孔径雷达使用雷达回波信号构建目标的高分辨率图像。
点目标成像仿真是通过对目标的散射特性进行建模,生成合成的雷达回波信号,然后对这些信号进行处理和成像,最终得到近似于真实雷达图像的仿真结果。
合成孔径雷达点目标成像仿真主要需要考虑以下几个方面:1.目标模型:选择合适的目标模型,并通过散射矩阵描述目标的散射特性。
2.雷达参数:设置合成孔径雷达的工作模式,包括工作频率、极化方式、天线模式等参数。
3.干扰模型:考虑地表的背景干扰信号,以及雷达系统本身的噪声和杂散信号。
4.信号处理:对合成的雷达回波信号进行振幅补偿、时频处理等操作,提高图像质量。
5.成像算法:选择合适的成像算法对处理后的信号进行成像和重建。
步骤合成孔径雷达点目标成像仿真的主要步骤如下:1.确定目标:选择仿真的目标,并确定目标的几何形状、尺寸和材料。
2.散射建模:基于目标的几何特性和散射特性,建立目标的散射矩阵描述。
3.雷达参数设置:设置合成孔径雷达的工作参数,包括工作频率、极化方式、发射功率等。
4.仿真信号生成:基于目标的散射特性和雷达参数,生成虚拟的雷达回波信号。
5.信号处理:对生成的雷达回波信号进行振幅补偿、时频处理等操作,提高成像质量。
6.成像算法:选择合适的成像算法对处理后的信号进行成像和重建。
7.仿真结果评估:根据仿真结果,对算法和参数进行评估和优化。
操作方法以下是使用Python语言进行合成孔径雷达点目标成像仿真的操作方法和代码示例。

合成孔径雷达第一次作业姓名:xxx 学号:xxx一题目:1.LFM信号分析:(1)仿真LFM信号;(2)观察不同TBP的LFM信号的频谱。
(3)观察不同过采样率下的DFT结果,注意频谱混叠情况。
2.脉冲压缩仿真:针对“基带LFM信号”:(1)实现无误差的脉冲压缩;(2)通过频域补0实现时域十倍以上的过采样率,得到光滑的时域波形,通过观察给出指标(IRW,PSLR);(3)阅读资料,按照公式实现3阶(-20dB),6阶(-40 dB)泰勒加权,观察加窗效果,分析指标(IRW,PSLR),并对比MATLAB TAYLORWIN函数的一致性;(4)在3阶泰勒加权下实现15.30.45.60.90.135度QPE下的脉冲压缩,显示输出波形,观察记录QPE的影响。
3.一维距离向仿真:(1)输入参数:目标参数:RCS=1,分别位于10km,11km,11km+3m,11km+50m处。
LFM信号参数:中心频率1.0GHz,脉冲宽度30us,带宽30MHz。
(2)输出:设计采样波门,仿真回波,完成脉冲压缩,检测各峰值位置,判断每个目标是否得以分辨,分析各出现在相应位置及幅度的原因。
二题目分析与解答:1.问题分析:由基础知识知,决定LFM信号的主要参数有中心频率fc(此处仿真取fc=0),带宽B,脉冲宽度Tp, 调频斜率K,其中K=B/Tp。
对LFM信号进行傅里叶变换时,不同的时宽带宽积(TBP)会对频谱有不同的影响。
主要程序段(源程序见附件):%参数设置Tp=5e-6; B=10e6; K=B/Tp;Fs=2*B; Ts=1/Fs;N=Tp/Ts;TBP=Tp*B%波形产生t=linspace(-Tp/2,Tp/2,N);St=exp(j*pi*K*t.^2); Phase=pi*K*t.^2;Fre=2*pi*K*t;f=linspace(-Fs/2,Fs/2,N);figure(2)plot(f*1e-6,fftshift(abs(fft(St))),'k'); xlabel('Frequency/MHz');ylabel('Magnitude');title('Frequence Response'); legend('TBP=50')fft_St=fftshift(abs(fft(St)));(1)不同脉宽和带宽下的LFM 信号:(2)不同TBP 下的信号频谱:分析:LFM 信号的频谱类似矩形窗,随着TBP 的增大,其越接近矩形窗,当TBP<100时,近似效果较差,当TBP>100时,近似效果较好,但随着TBP 的增大,频域上会产生吉布斯现象。
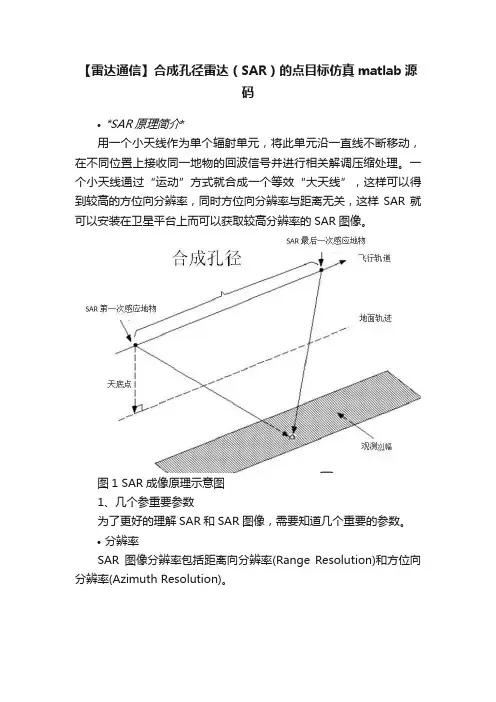
【雷达通信】合成孔径雷达(SAR)的点目标仿真matlab源码•*SAR原理简介*用一个小天线作为单个辐射单元,将此单元沿一直线不断移动,在不同位置上接收同一地物的回波信号并进行相关解调压缩处理。
一个小天线通过“运动”方式就合成一个等效“大天线”,这样可以得到较高的方位向分辨率,同时方位向分辨率与距离无关,这样SAR就可以安装在卫星平台上而可以获取较高分辨率的SAR图像。
图1 SAR成像原理示意图1、几个参重要参数为了更好的理解SAR和SAR图像,需要知道几个重要的参数。
•分辨率SAR图像分辨率包括距离向分辨率(Range Resolution)和方位向分辨率(Azimuth Resolution)。
图2 距离向和方位向示意图•距离向分辨率(Range Resolution)垂直飞行方向上的分辨率,也就是侧视方向上的分辨率。
距离向分辨率与雷达系统发射的脉冲信号相关,与脉冲持续时间成正比:Res( r) = c*τ/2其中c为光速,τ为脉冲持续时间。
•方位向分辨率(Azimuth Resolution)沿飞行方向上的分辨率,也称沿迹分辨率。
如下为推算过程:·真实波束宽度:β= λ/ D·真实分辨率:ΔL = β*R = Ls (合成孔径长度)·合成波束宽度βs = λ /(2* Ls) = D / (2* R)·合成分辨率ΔLs = βs* R = D / 2其中λ为波长,D为雷达孔径,R为天线与物体的距离。
从这个公式中可以看到,SAR系统使用小尺寸的天线也能得到高方位向分辨率,而且与斜距离无关(就是与遥感平台高度无关)。
图3 方位向分辨率示意图•极化方式雷达发射的能量脉冲的电场矢量,可以在垂直或水平面内被偏振。
无论哪个波长,雷达信号可以传送水平(H)或者垂直(V)电场矢量。
接收水平(H)或者垂直(V)或者两者的返回信号。
雷达遥感系统常用四种极化方式———HH、VV、HV、VH。
合成孔径雷达点目标仿真MATLAB程序合成孔径雷达成像系统点目标仿真源程序:clccloseallc=3e8;%光速fc=1e9;%载波频率lambda=c/fc;%波长%成像区域xmin=0;xmax=50;yc=10000;y0=500;%sar基本参数v=100;%雷达平台速度h=0;%雷达平台高度r0=sqrt(yc^2+h^2);d=4;%天线孔径长度lsar=lambda*r0/d;%合成孔径长度tsar=lsar/v;%合成孔径时间ka=-2*v^2/lambda/r0;%线性调频率ba=abs(ka*tsar);prf=2*ba;%脉冲重复频率prt=1/prf;ds=prt;%脉冲重复周期nslow=ceil((xmax-xmin+lsar)/v/ds);%脉冲数nslow=2^nextpow2(nslow);%定量为2的指数sn=linspace((xmin-lsar/2)/v,(xmax+lsar/2)/v,nslow);%创建时间向量prt=(xmax-xmin+lsar)/v/nslow;%更新prf=1/prt;%更新脉冲重复频率fa=linspace(-0.5*prf,0.5*prf,nslow);tr=5e-6;%脉冲宽度br=30e6;%调频信号频宽kr=br/tr;%阳入频率fsr=2*br;%快时间域取样频率dt=1/fsr;%快时间域取样间隔rmin=sqrt((yc-y0)^2+h^2);rmax=sqrt((yc+y0)^2+h^2+(lsar/2)^2);nfast=ceil(2*(rmax-rmin)/c/dt+tr/dt);nfast=2^nextpow2(nfast);tm=linspace(2*rmin/c,2*rmax/c+tr,nfast);dt=(2*rmax/c+tr-2*rmin/c)/nfast;%更新fsr=1/dt;fr=linspace(-0.5*fsr,0.5*fsr,nfast);dy=c/2/br;%距离分辨率dx=d/2;%方位分辨率ntarget=3;%目标数目ptarget=[xmin,yc,1%目标边线xmin,yc+10*dy,1xmin+20*dx,yc+50*dy,1];k=ntarget;%目标数目n=nslow;%快时间取样数m=nfast;%慢时间取样数t=ptarget;%目标边线%合成孔径回波仿真srnm=zeros(n,m);fork=1:1:ksigma=t(k,3);dslow=sn*v-t(k,1);r=sqrt(dslow.^2+t(k,2)^2+h^2);tau=2*r/c;dfast=ones(n,1)*tm-tau'*ones(1,m);phase=pi*kr*dfast.^2-(4*pi/lambda)*(r'*ones(1,m));srnm=srnm+sigma*exp(j*phase).*(0end%距离放大tr=tm-2*rmin/c;refr=exp(j*pi*kr*tr.^2).*(0temp1=fft(srnm(k2,:));fsrnm=temp1.*conj(f_refr);sr(k2,:)=ifft(fsrnm);end%方位放大ta=sn-(xmin+xmax)/2/v;refa=exp(j*pi*ka*ta.^2).*(abs(ta)temp2=fft(sr(:,k3));f_sa=temp2.*conj(f_refa.' );sa(:,k3)=fftshift(ifft(f_sa));endrow=tm*c/2;col=sn*v;%绘图%脉冲雷达数据figure(1)subplot(211)imagesc(abs(srnm));title('sardata')subplot(212)imagesc(an gle(srnm))%灰度图figure(2)colormap(gray)imagesc(row,col,255-abs(sr));title('距离放大'),xlabel('距离向'),ylabel('方位向');figure(3)colormap(gray)imagesc(row,col,255-abs(sa));title('方位放大'),xlabel('距离向'),ylabel('方位向');%轮廓图figure(4)ga=abs(sa);a=max(max(ga));contour(row,col,ga,[0.707*a,a],'b');gridonx 1=sqrt(h^2+min(abs(ptarget(:,2))).^2)-5*dy;x2=sqrt(h^2+max(abs(ptarget(:,2))).^2)+5*dy;y1=min(ptarget(:,1))-5*dx;y2=max(ptarget(:,1))+5*dx;axis([x1,x2,y1,y2])%三维光学图figure(5)mesh(ga((400:600),(200:500)));axistightxlabel('range'),ylabel('azimut h');仿真结果图:图4.1点目标完整脉冲数据图4.2距离放大后光学图图4.3方位放大后光学图(图形目标光学灰度图)图4.4图形目标光学轮廓图。
合成孔径雷达目标识别与仿真研究合成孔径雷达目标识别与仿真研究摘要:合成孔径雷达(Synthetic Aperture Radar,SAR)是一种以主动方式获取地面图像的遥感技术,具有高分辨率、全天候、全天时等优点,被广泛应用于土地资源调查、灾害监测、军事侦察等领域。
本文针对合成孔径雷达的目标识别与仿真问题进行了研究。
文章首先介绍了合成孔径雷达的基本原理和特点,接着详细分析了合成孔径雷达图像中的目标特征,包括散射机制、杂波和布告等。
然后,本文通过仿真实验,从目标尺度、角度等方面对合成孔径雷达的目标识别效果进行了研究。
最后,本文探讨了合成孔径雷达技术的发展趋势和应用前景。
关键词:合成孔径雷达;目标识别;仿真研究;散射机制;目标特征;应用前景一、引言合成孔径雷达是一种重要的地面目标识别技术,具有高分辨率、全天候、全天时等优点,被广泛应用于土地资源调查、灾害监测、军事侦察等领域。
为了实现高效率的目标识别与仿真,需要对合成孔径雷达的原理和目标特征进行深入研究。
本文旨在通过对合成孔径雷达目标识别与仿真的研究,为相关领域的科研人员提供参考。
二、合成孔径雷达的基本原理和特点合成孔径雷达是利用累积多个狭窄波束的回波信号进行综合处理的一种无源遥感技术。
它的工作原理是通过发射连续的微波脉冲,然后接收并记录脉冲回波信号,通过对这些信号进行处理和合成,得到高分辨率的图像信息。
合成孔径雷达具有全天候、全天时的能力,无论昼夜、晴雨、云雾,都能够实现高质量的成像。
三、合成孔径雷达图像中的目标特征合成孔径雷达图像中的目标特征主要包括散射机制、杂波和布告。
目标的散射机制决定了其回波信号的功率、相位和极化等特性,通过分析和处理这些特性可以实现目标的识别。
杂波是合成孔径雷达图像中除目标信号外的无用信号,其强度的大小和分布规律会影响目标的分辨率和识别性能。
布告是由于合成孔径雷达的工作方式和地面杂波等因素造成的频谱失真,对目标探测和识别造成一定的影响。
合成孔径雷达点目标成像仿真a 一个点目标的机载 SAR 正侧视回波仿真i. 距离徙动不超过 1个单元b 简单二维脉压成像原始数据仿真方法:1. 设计分辨率,飞行参数,雷达参数(1分辨率越低、作用距离越小、波长越小,则距离徙动越小。
(2不用考虑天线方向图加权,按照矩形天线方向图计算。
(3天线波束宽度按照多普勒带宽反算,多普勒带宽按照分辨率反算即可。
(4 prf 和 fs 按照带宽 1.2倍。
(5确定距离向最近采样斜距和采样点数。
仿真实例雷达载频:5.3GHz雷达速度:150m/s发射信号带宽:150MHz方位天线尺寸:2m参考点斜距:20km距离过采样率:1.8方位过采样率 2.3距离徙动最大 1.6m , 2.8个距离单元正侧视 SAR 在二维时域的距离徙动可以表示为:R(η =√ R02+Vr2η2其中η表示方位向慢时间, V r 表示 SAR 在方位向上的速度, R 0表示目标的最短斜距,对上式进行 Taylor 展开,并忽略高次项,可以得到:R(η ≈ R0+ Vr2 2R0η2由上式可以看出,距离徙动与 R 0, V r 有关,按照实验要求给出的数据,得到的回波如下左图图所示,对其边缘局部放大,可以得到如下右图。
显然,此时距离徙动已经超过一个距离单元。
为了达到距离徙动不超过一个距离单元的目的,现对数据进行修改:令最短斜距 R 0=10km,带宽 B= 100MHz 。
然后重新生成回波, 如下图所示:由上图可以看出,调整参数后,距离徙动在一个距离单元内。
任意截取方位向和距离向的一个信号,如下图所示:可以看出,方位向和距离向都是线性调频信号。
然后在距离向进行脉冲压缩,可到下左图,然后再任意截取方位向和距离向的一个信号,如下右图,显然,此时距离向是一个压缩后的脉冲,而方位向仍是线性调频信号。
然后再进行方位向压缩,压缩后即可可到点目标的图像,如下图所示:显然,经过方位向脉冲压缩后,得到一个点目标。
合成孔径雷达成像技术的研究与应用合成孔径雷达(synthetic aperture radar)是指利用雷达信号波束的运动和相干性质来模拟一架大型雷达进行成像的技术。
合成孔径雷达成像技术具有高分辨率、大覆盖面积、不受天气影响等优点,因此被广泛应用于地球观测、海洋监测、军事情报等领域。
本文将探讨合成孔径雷达成像技术的研究与应用。
一、合成孔径雷达成像技术的原理合成孔径雷达成像技术的原理可以简单地描述为:雷达向目标发射一系列脉冲信号,接收反射回来的信号,根据信号的相位差异进行信号处理并拼接,以得到高分辨率的雷达图像。
具体来说,合成孔径雷达的成像过程主要分为以下几个步骤:1. 发射雷达信号:雷达发射一系列相同频率的脉冲信号,这些信号中的每一个脉冲称为一个“元脉冲”。
2. 接收反射信号:脉冲信号经过目标表面的反射之后返回雷达,形成“回波”。
3. 接收信号处理:雷达接收仪将接收到的回波信号进行处理,包括功率放大、滤波、解调等。
4. 记录回波信号:接收信号处理器将回波信号按时间序列记录下来,并存储到雷达的内部存储器中。
5. 合成处理:雷达信号处理器对储存的回波信号进行合成处理,根据回波信号的相位差异重构成像区域的空间信息,生成雷达图像。
二、合成孔径雷达成像技术的应用领域合成孔径雷达成像技术具有高分辨率、大覆盖面积、不受天气影响等优点,因此适用于多个领域。
1. 地球观测地球观测是合成孔径雷达应用的主要领域之一。
合成孔径雷达可以探测地球表面的形态、地形、植被、水文地质等信息。
特别是在对地震、火山等地质灾害进行监测和预测方面,合成孔径雷达可以提供高分辨率、大覆盖面积的影像,有助于科学家们更好地理解和预测地质灾害。
2. 海洋监测合成孔径雷达可以对海洋面进行监测,检测海洋表面的形态、海底地形、海洋潮汐、海洋流量等信息。
它还可以监测海岸线的演变、海冰覆盖、海浪、风暴增强等。
3. 军事情报合成孔径雷达在军事情报领域中有广泛应用。
合成孔径雷达成像系统点目标仿真源程序:clcclose allC=3e8; %光速Fc=1e9; %载波频率lambda=C/Fc; %波长%成像区域Xmin=0;Xmax=50;Yc=10000;Y0=500;%SAR基本参数V=100; %雷达平台速度H=0; %雷达平台高度R0=sqrt(Yc^2+H^2);D=4; %天线孔径长度Lsar=lambda*R0/D; %合成孔径长度Tsar=Lsar/V; %合成孔径时间Ka=-2*V^2/lambda/R0;%线性调频率Ba=abs(Ka*Tsar);PRF=2*Ba; %脉冲重复频率PRT=1/PRF;ds=PRT; %脉冲重复周期Nslow=ceil((Xmax-Xmin+Lsar)/V/ds);%脉冲数Nslow=2^nextpow2(Nslow); %量化为2的指数sn=linspace((Xmin-Lsar/2)/V,(Xmax+Lsar/2)/V,Nslow); %创建时间向量PRT=(Xmax-Xmin+Lsar)/V/Nslow; %更新PRF=1/PRT; % 更新脉冲重复频率fa=linspace(-0.5*PRF,0.5*PRF,Nslow);Tr=5e-6; %脉冲宽度Br=30e6; %调频信号带宽Kr=Br/Tr; %调频率Fsr=2*Br; %快时间域取样频率dt=1/Fsr; %快时间域取样间隔Rmin=sqrt((Yc-Y0)^2+H^2);Rmax=sqrt((Yc+Y0)^2+H^2+(Lsar/2)^2);Nfast=ceil(2*(Rmax-Rmin)/C/dt+Tr/dt);Nfast=2^nextpow2(Nfast);tm=linspace(2*Rmin/C,2*Rmax/C+Tr,Nfast);dt=(2*Rmax/C+Tr-2*Rmin/C)/Nfast; %更新Fsr=1/dt;fr=linspace(-0.5*Fsr,0.5*Fsr,Nfast);DY=C/2/Br; %距离分辨率DX=D/2; %方位分辨率Ntarget=3; %目标数目Ptarget=[Xmin,Yc,1 %目标位置Xmin,Yc+10*DY,1Xmin+20*DX,Yc+50*DY,1];K=Ntarget; %目标数目N=Nslow; %慢时间采样数M=Nfast; %快时间采样数T=Ptarget; %目标位置%合成孔径回波仿真Srnm=zeros(N,M);for k=1:1:Ksigma=T(k,3);Dslow=sn*V-T(k,1);R=sqrt(Dslow.^2+T(k,2)^2+H^2);tau=2*R/C;Dfast=ones(N,1)*tm-tau'*ones(1,M);phase=pi*Kr*Dfast.^2-(4*pi/lambda)*(R'*ones(1,M));Srnm=Srnm+sigma*exp(j*phase).*(0<Dfast&Dfast<Tr).*((abs(Dslow)<Lsar/2)'*ones(1,M));end%距离压缩tr=tm-2*Rmin/C;Refr=exp(j*pi*Kr*tr.^2).*(0<tr&tr<Tr);%距离压缩参考函数F_Refr=fft((Refr));Sr=zeros(N,M);for k2=1:1:Mtemp1=fft(Srnm(k2,:));FSrnm=temp1.*conj(F_Refr);Sr(k2,:)=ifft(FSrnm);end%方位压缩ta=sn-(Xmin+Xmax)/2/V;Refa=exp(j*pi*Ka*ta.^2).*(abs(ta)<Tsar/2); %方位压缩参考函数F_Refa=fft(Refa);Sa=zeros(N,M);for k3=1:1:Mtemp2=fft(Sr(:,k3));F_Sa=temp2.*conj(F_Refa.');Sa(:,k3)=fftshift(ifft(F_Sa));endrow=tm*C/2;col=sn*V;%绘图%回波雷达数据figure(1)subplot(211)imagesc(abs(Srnm));title('SAR data')subplot(212)imagesc(angle(Srnm))%灰度图figure(2)colormap(gray)imagesc(row,col,255-abs(Sr));title('距离压缩'),xlabel('距离向'),ylabel('方位向');figure(3)colormap(gray)imagesc(row,col,255-abs(Sa));title('方位压缩'),xlabel('距离向'),ylabel('方位向');%轮廓图figure(4)Ga=abs(Sa);a=max(max(Ga));contour(row,col,Ga,[0.707*a,a],'b');grid onx1=sqrt(H^2+min(abs(Ptarget(:,2))).^2)-5*DY;x2=sqrt(H^2+max(abs(Ptarget(:,2))).^2)+5*DY;y1=min(Ptarget(:,1))-5*DX;y2=max(Ptarget(:,1))+5*DX;axis([x1,x2,y1,y2])%三维成像图figure(5)mesh(Ga((400:600),(200:500)));axis tightxlabel('Range'),ylabel('Azimuth');仿真结果图:图4. 1 点目标原始回波数据图4. 2 距离压缩后成像图图4. 3 方位压缩后成像图(点阵目标成像灰度图)图4. 4 点阵目标成像轮廓图。
学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
本人完全意识到本声明的法律后果由本人承担。
作者签名:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保障、使用学位论文的规定,同意学校保留并向有关学位论文管理部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权省级优秀学士学位论文评选机构将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
本学位论文属于1、保密□,在_________年解密后适用本授权书。
2、不保密□。
(请在以上相应方框内打“√”)作者签名:年月日导师签名:年月日目录摘要.................................................. ()关键词................................................ ()一、绪论.............................................. ()引言............................................. ()研究目的和意义 (2)发展历史及学术动态................................. ()二、SAR的应用 ......................................... ()引言.............................................. ()合成孔径雷达在军事领域的应用 (3)战略应用 (3)战术应用 (3)特别应用 (3)合成孔径雷达在民用领域的应用 (3)在地形测绘和制图方面 (3)在海洋应用方面 (3)在水资源应用方面 (3)三、合成孔径雷达成像的原理 (3)成像特点 (3)成像原理 (4)成像流程图 (4)SAR成像理论模型 (5)四、SAR成像算 (5)引言 (5)距离——多普勒算法(RD) (5)信号模型及分析 (6)距离压缩 (7)距离移动校正 (7)方位向压缩 (9)CS算法 (9)算法特点简介 (10)SAR 斜视回波模型 (10)SAR 斜视回波几何模型 (10)距离移动分析 (11)改进的CS算法 (11)五、算法的Matlab仿真 (11)RD算法 (11)仿真参数 (11)仿真结果 (12)仿真结果说明 (13)CS算法 (13)仿真参数 (14)仿真结果 (15)仿真性能分析 (16)六、成像算法对分辨率的影响 (17)多普勒中心频率误差 (17)多普勒调频误差 (16)改进型算法的多普勒参数估计与设定 (17)七、总结 (18)致谢 (18)参考文献 (18)附录 (20)合成孔径雷达点目标成像仿真学生:宋家明指导老师:黄瑶三峡大学理学院摘要:本文主要介绍合成孔径雷达(SAR)点目标成像的相关知识,简要介绍了SAR在军事和民事中的运用,阐述了其成像原理及特点。
合成孔径雷达(SAR)的点目标仿真成像电子与通信工程 侯智深 MF0923008一. S AR 原理简介合成孔径雷达(Synthetic Aperture Radar ,简称SAR)是一种高分辨率成像雷达技术。
它利用脉冲压缩技术获得高的距离向分辨率,利用合成孔径原理获得高的方位向分辨率,从而获得大面积高分辨率雷达图像。
SAR 回波信号经距离向脉冲压缩后,雷达的距离分辨率由雷达发射信号带宽决定:2r rC B ρ=,式中r ρ表示雷达的距离分辨率,r B 表示雷达发射信号带宽,C 表示光速。
同样,SAR 回波信号经方位向合成孔径后,雷达的方位分辨率由雷达方位向的多谱勒带宽决定:a a av B ρ=,式中a ρ表示雷达的方位分辨率,a B 表示雷达方位向多谱勒带宽,a v 表示方位向SAR 平台速度。
二. S AR 的成像模式和空间几何关系根据SAR 波束照射的方式,SAR 的典型成像模式有Stripmap(条带式),Spotlight(聚束式)和Scan(扫描模式),如图。
条带式成像是最早研究的成像模式,也是低分辨率成像最简单最有效的方式;聚束式成像是在一次飞行中,通过不同的视角对同一区域成像,因而能获得较高的分辨率;扫描模式成像较少使用,它的信号处理最复杂。
SAR 典型的成像模式这里分析SAR 点目标回波时,只讨论正侧式Stripmap SAR ,正侧式表示SAR 波束中心和SAR 平台运动方向垂直,如图2.2,选取直角坐标系XYZ 为参考坐标系,XOY 平面为地平面;SAR 平台距地平面高h ,沿X 轴正向以速度V 匀速飞行;P 点为SAR 平台的位置矢量,设其坐标为(x,y,z); T 点为目标的位置矢量,设其坐标为(,,)T T T x y z ;由几何关系,目标与SAR 平台的斜距为:(PT x =由图可知:0,,0T y z h z ===;令x vs =⋅,其中v 为平台速度,s 为慢时间变量(slow time ),假设T x vs =,其中s 表示SAR 平台的x 坐标为T x的时刻;再令r =,r 表示目标与SAR 的垂直斜距,重写2.1式为:(;)PT R s r = =(;)R s r 就表示任意时刻s时,目标与雷达的斜距。
合成孔径雷达高分辨率成像虚拟仿真实验平台设计丁泽刚;李凌豪;李埔丞;吕林翰;史一鹏【期刊名称】《实验技术与管理》【年(卷),期】2024(41)1【摘要】合成孔径雷达(synthetic aperture radar,SAR)系统组成复杂,搭载于飞机、卫星等运动平台上才可实现数据获取,难以开展基于SAR雷达实物的实验教学。
为解决此问题,设计并搭建了SAR高分辨率成像虚拟仿真实验平台。
该虚拟仿真实验平台将系统设计技术、实验设计技术、数据采集过程、信号处理技术、图像评估技术等SAR实验的完整流程进行了高展示度、高保真度、高交互性的计算机模拟。
一方面,该虚拟仿真实验可以帮助学生理解SAR设计、工作和应用的流程,巩固相关课程基础知识,激发学习雷达信号处理知识的兴趣;另一方面,可以考查学生对相关知识的综合应用能力,增强学生解决实际问题的技能。
该仿真平台已成功应用于虚拟仿真教学课程实践,教学效果良好,对培养新工科技术型人才具有重要意义。
【总页数】7页(P136-142)【作者】丁泽刚;李凌豪;李埔丞;吕林翰;史一鹏【作者单位】北京理工大学信息与电子学院雷达技术研究所;嵌入式实时信息处理技术北京市重点实验室;北京理工大学重庆创新中心【正文语种】中文【中图分类】TN951【相关文献】1.临近空间平台高分辨率宽测绘带重复访问合成孔径雷达成像模式及算法研究2.基于虚拟仿真技术的绿色建筑设计实验教学平台研究——以安徽建筑大学建筑设计虚拟仿真实验教学项目为例3.基于网络平台应用型本科院校艺术设计专业虚拟实验教学研究——以展示设计虚拟仿真教学项目为例4.光电成像与视觉感知虚拟仿真实验教学设计——以红外目标成像仿真与处理集成验证实验为例5.依托虚拟仿真平台的“光电图像处理”课程实验教学改革探索——以成像目标检测与跟踪实验为例因版权原因,仅展示原文概要,查看原文内容请购买。
合成孔径雷达点目标成像仿真
a) 一个点目标的机载SAR正侧视回波仿真
i. 距离徙动不超过1个单元
b) 简单二维脉压成像
原始数据仿真方法:
1. 设计分辨率,飞行参数,雷达参数
(1)分辨率越低、作用距离越小、波长越小,则距离徙动越小。
(2)不用考虑天线方向图加权,按照矩形天线方向图计算。
(3)天线波束宽度按照多普勒带宽反算,多普勒带宽按照分辨率反算即可。
(4)prf和fs按照带宽1.2倍。
(5)确定距离向最近采样斜距和采样点数。
仿真实例
雷达载频:5.3GHz
雷达速度:150m/s
发射信号带宽:150MHz
方位天线尺寸:2m
参考点斜距:20km
距离过采样率:1.8
方位过采样率2.3
距离徙动最大1.6m,2.8个距离单元
正侧视SAR在二维时域的距离徙动可以表示为:
R(η)=√R02+V r2η2
其中η表示方位向慢时间,V r表示SAR在方位向上的速度,R0表示目标的最短斜距,对上式进行Taylor展开,并忽略高次项,可以得到:
R(η)≈R0+V r2
2R0
η2
由上式可以看出,距离徙动与R0,V r有关,按照实验要求给出的数据,得到的回波如下左图图所示,对其边缘局部放大,可以得到如下右图。
显然,此时距离徙动已经超过一个距离单元。
为了达到距离徙动不超过一个距离单元的目的,现对数据进行修改:令最短斜距R0=10km,带宽B= 100MHz。
然后重新生成回波,如下图所示:
由上图可以看出,调整参数后,距离徙动在一个距离单元内。
任意截取方位向和距离向的一个信号,如下图所示:
可以看出,方位向和距离向都是线性调频信号。
然后在距离向进行脉冲压缩,可到下左图,然后再任意截取方位向和距离向的一个信号,如下右图,显然,此时距离向是一个压缩后的脉冲,而方位向仍是线性调频信号。
然后再进行方位向压缩,压缩后即可可到点目标的图像,如下图所示:
显然,经过方位向脉冲压缩后,得到一个点目标。