异步电动机正反转控制
- 格式:pptx
- 大小:1.36 MB
- 文档页数:15
实验十五异步电动机的正反转控制一、实验目的1.通过实现三相鼠笼式异步电动机正反转控制电路的实际接线,掌握电气控制原理图的读图与电气控制电路的联接。
2. 了解异步电动机控制系统中各个元件的作用。
3. 了解异步电动机的正常运行的各种保护措施。
二、实验器材三、实验内容联接三相异步电动机的控制电路,了解三相异步电动机正反转工作原理,掌握电气控制系统原理图的读图方法,掌握三相异步电动机正反转控制电路的接线,观察异步电动机的转动方向及接触器的运行情况,掌握电气控制系统中的各种保护及控制电路中的自锁与互锁的作用。
四、实验原理异步电动机工作时应当具备短路保护、过载保护与失压保护,实现对电动机上述保护任务的电器分别为熔断器、热继电器与接触器,异步电动机运转的控制电路中均带有这些保护电器。
异步电动机可以单方向运转也可以正、反两个方向转,由于电动机转子的转动方向是跟随电动机内部同步磁场的方向转动,所以要改变电动机的转动方向就需要改变电动机内部同步磁场的旋转方向,而改变同步磁场的旋转方向需要改变三相电源的相序,在异步电动机控制电路中利用正、反转接触器分别动作,改变了电动机三相电源的相序,实现了电动机的正反转控制。
在异步电动机的正反转控制电路中,为避免正转接触器与反转接触器同时通电所造成的电源短路故障,在电动机的正反转控制电路中需要增加互锁电路,控制电路中的互锁有两种方式:电气互锁与机械互锁。
电气互锁由串联在正反转控制电路中的反、正转接触器的常闭触点实现,仅联接电气互锁的正反转控制电路,当需要电动机反转时,必须先按下停止按钮让正转的电动机停车,再按下反转启动按钮,让电动机开始反转,即电动机不能由正转状态直接进入反转状态。
机械互锁由控制电路中的正、反转启动按钮开关实现,同时联接了电气互锁与机械互锁的电动机正反转控制电路,在电动机正转时按下电动机的反转启动按钮,电动机可以直接进入反转状态,不再需要经过停车这个步骤,反之亦然,电气互锁与机械互锁这两个互锁电路同时联接,可以增加电动机正反转控制电路的可靠性。
三相异步电动机按钮联锁正反转控制工作原理三相异步电动机按钮联锁正反转控制是一种常见的电机控制方式,通常用于需要频繁正反转的场合,如输送机、提升机等设备。
按钮联锁控制是指通过按钮控制电机的正反转,并且在正向或反向运行时,另一方向的按钮不能起作用,以确保安全可靠的运行。
本文将从工作原理、控制电路、联锁逻辑和应用场景等方面对三相异步电动机按钮联锁控制进行详细介绍。
一、工作原理三相异步电动机是工业领域中常见的一种电动机类型,它通过三相交流电源产生旋转磁场,从而驱动负载旋转。
按钮联锁控制是通过按钮控制电机的正反转,同时通过联锁控制电路来防止误操作和保证运行的安全性。
其工作原理主要包括按钮控制、继电器控制和联锁控制三个部分。
1.按钮控制按钮控制是通过控制按钮来实现电机的正反转。
通常有正向按钮(或称前进按钮)和反向按钮(或称后退按钮)。
按下正向按钮,电机正向运行;按下反向按钮,电机反向运行。
在按钮未按下时,电机处于停止状态。
按钮控制是电机运行的基础。
2.继电器控制继电器是控制电机正反转的关键组件。
通过正向按钮和反向按钮控制对应的继电器的触点,从而实现电机的正反转。
继电器具有可靠的电气隔离和可控性,是控制电机正反转的重要部件。
3.联锁控制联锁控制是在按钮控制的基础上增加的安全控制功能。
其原理是通过联锁逻辑电路,使得在电机正向或反向运行的过程中,另一方向的按钮不能起作用,从而避免误操作和保证运行的安全性。
联锁控制是按钮控制的增强和完善。
二、控制电路三相异步电动机按钮联锁正反转控制的控制电路通常由按钮、继电器和联锁逻辑电路组成。
下面将对每个部分的功能和连接进行详细介绍。
1.按钮正向按钮和反向按钮是控制电机正反转的主要控制元件。
一般情况下,按钮通过脉冲信号触发继电器的动作,从而控制电机的正反转。
在按钮未按下时,电机处于停止状态。
2.继电器继电器是实现正反转控制的关键元件。
通过控制按钮的脉冲信号,继电器使得对应的触点在正向或反向按钮按下时闭合,从而实现电机的正反转。
三相异步电动机的正反转控制实验报告实验目的⑴了解三相异步电动机接触器联锁正反转控制的接线和操作方法。
⑵理解联锁和自锁的概念。
⑶掌握三相异步电动机接触器的正反转控制的基本原理与实物连接的要求。
实验器材三相异步电动机(M 3~)、万能表、联动空气开关(QS1)、单向空气开关(QS2)、交流接触器(KM1,KM2)、组合按钮(SB1,SB2,SB3)、端子排7副、导线若干、螺丝刀等。
实验原理三相异步电动机的旋转方向是取决于磁场的旋转方向,而磁场的旋转方向又取决于电源的相序,所以电源的相序决定了电动机的旋转方向。
任意改变电源的相序时,电动机的旋转方向也会随之改变。
实验操作步骤连接三相异步电动机原理图如图所示,其中线路中的正转用接触器KM1和反转用的接触器KM2,分别由按钮SB2和反转按钮SB2控制。
控制电路有两条,一条由按钮SB1和KM1线圈等组成的正转控制电路;另一条由按钮SB2和KM2线圈等组成的反转控制电路。
当按下正转启动按钮SB1后,电源相通过空气开关QS1,QS2和停止按钮SB3的动断接点、正转启动按钮SB1的动合接点、接触器KM 和其他的器件形成自锁,使得电动机开始正转,当按下SB3时,电动机停止转动,在按下SB2时,接触器KM和其他的器件形成自锁反转。
安装接线1在连接控制实验线路前,应先熟悉各按钮开关、交流接触器、空气开关的结构形式、动作原理及接线方式和方法。
2 在不通电的情况下,用万用表检查各触点的分、合情况是否良好。
检查接触器时,特别需要检查接触器线圈电压与电源电压是否相符。
3将电器元件摆放均匀、整齐、紧凑、合理,并用螺丝进行安装,紧固各元件时应用力均匀,紧固程度适当。
4控制电路采用红色,按钮线采用红色,接地线绿黄双色线。
布线时要符合电气原理图,先将主电路的导线配完后,再配控制回路的导线;布线时还应符合平直、整齐、紧贴敷设面、走线合理及接点不得松动。
同一平面的导线应高低一致或前后一致,不能交叉。
三相异步电动机正反转控制电路原理一、引言二、三相异步电动机的结构与工作原理三相异步电动机由转子和定子组成。
转子是通过绕在铁心上的绕组与定子的磁场相互作用而转动的,定子则是通过交流电源提供的电流产生磁场。
在正常工作时,通过交流电源提供的三相交流电,定子上的绕组产生旋转磁场,转子中的导体感受到磁场的作用力而转动起来。
正转控制电路实际上是控制定子绕组的相序,使得定子产生一个顺时针方向的旋转磁场。
这样,转子中的导体就会被磁场的作用力吸引,产生转动。
电源通过接触器K1、K2分别接通R、S两相的接线板,使得电流通过电动机的两个定子绕组。
K3、K4是控制按钮,按下按钮K3和K4,使得接触器K1、K2动作。
当K1闭合,S相接通;当K2闭合,R相接通。
这样,电动机的两个定子绕组就可以依次接通,形成一个顺时针方向的旋转磁场。
电源通过接触器K1、K2分别接通R、S两相的接线板,使得电流通过电动机的两个定子绕组。
K4、K5是控制按钮,按下按钮K4和K5,使得接触器K1、K2动作。
当K1闭合,R相接通;当K2闭合,S相接通。
这样,电动机的两个定子绕组就可以依次接通,形成一个逆时针方向的旋转磁场。
而按钮K5可以将定子绕组的相序进行交换,使得电动机的旋转方向发生变化。
五、结论通过设计相应的正反转控制电路,可以实现三相异步电动机的正反转。
正转控制电路主要通过控制定子绕组的相序,使得定子产生一个顺时针方向的旋转磁场;反转控制电路则通过交换定子绕组的相序,使得电动机的旋转方向发生变化。
这些电路主要由电源、接触器、热继电器、控制按钮、接线板和电动机等组成。
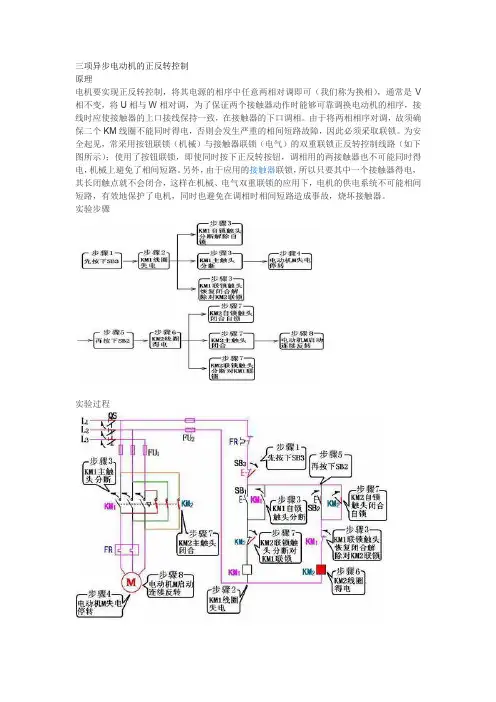
三项异步电动机的正反转控制原理电机要实现正反转控制,将其电源的相序中任意两相对调即可(我们称为换相),通常是V 相不变,将U相与W相对调,为了保证两个接触器动作时能够可靠调换电动机的相序,接线时应使接触器的上口接线保持一致,在接触器的下口调相。
由于将两相相序对调,故须确保二个KM线圈不能同时得电,否则会发生严重的相间短路故障,因此必须采取联锁。
为安全起见,常采用按钮联锁(机械)与接触器联锁(电气)的双重联锁正反转控制线路(如下图所示);使用了按钮联锁,即使同时按下正反转按钮,调相用的两接触器也不可能同时得电,机械上避免了相间短路。
另外,由于应用的接触器联锁,所以只要其中一个接触器得电,其长闭触点就不会闭合,这样在机械、电气双重联锁的应用下,电机的供电系统不可能相间短路,有效地保护了电机,同时也避免在调相时相间短路造成事故,烧坏接触器。
实验步骤实验过程图中主回路采用两个接触器,即正转接触器KM1和反转接触器KM2。
当接触器KM1的三对主触头接通时,三相电源的相序按U―V―W接入电动机。
当接触器KM1的三对主触头断开,接触器KM2的三对主触头接通时,三相电源的相序按W―V―U接入电动机,电动机就向相反方向转动。
电路要求接触器KM1和接触器KM2不能同时接通电源,否则它们的主触头将同时闭合,造成U、W两相电源短路。
为此在KM1和KM2线圈各自支路中相互串联对方的一对辅助常闭触头,以保证接触器KM1和KM2不会同时接通电源,KM1和KM2的这两对辅助常闭触头在线路中所起的作用称为联锁或互锁作用,这两正向启动过程对辅助常闭触头就叫联锁或互锁触头。
正向启动过程按下起动按钮SB2,接触器KM1线圈通电,与SB2并联的KM1的辅助常开触点闭合,以保证KMl线圈持续通电,串联在电动机回路中的KM1的主触点持续闭合,电动机连续正向运转。
停止过程按下停止按钮SB1,接触器KMl线圈断电,与SB2并联的KM1的辅助触点断开,以保证KMl线圈持续失电,串联在电动机回路中的KMl的主触点持续断开,切断电动机定子电源,电动机停转。
异步电机的正反转控制原理
异步电机的正反转控制原理是通过改变电源的相序来实现的。
异步电机是由转子和定子组成的,当电源的相序发生改变时,定子的磁场方向也会发生改变,进而改变了转子的磁场方向。
根据右手定则,当定子的磁场方向改变时,转子就会发生反向转动。
具体来说,正转控制和反转控制的原理如下:
1. 正转控制:当期望电机正转时,需要将电源的相序设置为正常顺序,即依次通电给各个相,使得定子的磁场方向保持一个确定的方向。
这样,定子的磁场就会产生一个旋转磁场,而转子会被这个旋转磁场牵引,从而实现正转运动。
2. 反转控制:当期望电机反转时,需要将电源的相序逆序设置,即逆序依次通电给各个相。
这样,定子的磁场方向也会逆序改变,导致定子磁场方向与转子磁场方向的差别进一步加大,从而使转子发生反方向的转动。
总结来说,异步电机的正反转控制可以通过改变电源的相序来改变定子磁场的方向,实现转子的正向或反向运动。

三相异步电动机的正反转控制及调整 绕线式异步电动机的起动 绕线式三相异步电动机可以在转子回路中串入电阻进行起动,这样就减小了起动电流。
一般采用起动变阻器起动,起动时全部电阻串入转子电路中,随着电动机转速逐渐加快,利用控制器逐级切除起动电阻,最后将全部起动电阻从转子电路中切除。
转子回路串接频敏变阻器起动。
频敏变阻器的电阻随线圈中所通过的电流频率而变。
起动时,转差率S=1,转子电流(即频敏电阻线圈通过的电流)频率最高,等于电源频率。
因此,频敏变阻器的电阻最大,这就相当于起动时在转子回路中串接一个较大电阻,从而使起动电流减小。
随着电动机转速的加快转差率S逐渐减小,转子电流频率逐渐降低,频敏变阻器电阻也逐渐减小,最后把电动机的转子绕组短接,频敏变阻器从转子电路中切除。
采用频敏变阻器起动,具有起动平滑、操作简便、运行可靠、成本低廉等优点,因此在绕线式电动机中应用较广。
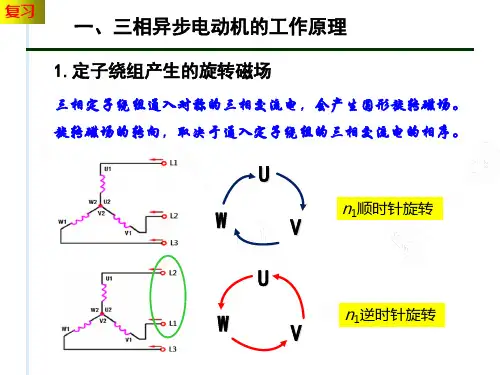
三相异步电动机的正反转控制 三相异步电动机的旋转方向与旋转磁场的旋转方向一致,而旋转磁场的旋转方向取决于三相电流的相序。
因此,要改变电动机的旋转方向,必须改变三相交流电的相序。
实际上,只要将接到电源的任意二根联线对调即可。
三相异步电动机的正、反转方法:任意调换电源的两根进线,电动机反转。
为此,只要用两个交流接触器就能满足这一要求,当正转接触器KMI工作时,电动机正转;当反转接KM2工作时,由于调换了两根电源线,所以电动机反转。
如果两个接触器同时工作,那幺将有两根电源线通过它们的主触头而使电源短路。
所以对正反转控制线路最根本的要求是:必须保证两个接触器不能同时工作。
这种在同一时间里两个接触器只允许一个工作的控制作用称为联锁或互锁。
在图(a)所示的控制电路中,正转接触器KM1的一个常闭辅助触头串接在反转接触器KM2的线圈电路中,而反转接触器的一个常闭辅助触头串接在正转接触器的线圈电路中。
这两个常闭触头称为联锁触头。
这样一来,当按下正转起动按钮SB1时,正转接触器线圈通电,主触头KM1闭合,电动机正转。
三相异步电动机的正、反转控制的实现方法
三相异步电动机的正、反转控制可以通过以下几种方法来实现:
1. 交叉蓝玩法:将三相交流电源的任意两相进行交叉接线,实现正、反转控制。
当两相接线正常时,电机为正转;当两相接线交叉时,电机为反转。
2. 电磁反转器:通过控制电磁反转器中继电器的工作状态,实现正、反转控制。
电磁反转器可以通过交叉切换电源的相序,使电机正、反转。
3. 变频器:通过控制变频器的输出频率、相序和电压,实现电机的正、反转。
变频器可以改变电源的频率,从而改变电机的转速和方向。
4. PLC控制:使用可编程逻辑控制器(PLC)编写程序,通过
控制电磁继电器的通断,实现电机的正、反转。
通过PLC可
以灵活地控制电机的启停和方向。
以上是几种常见的实现方法,具体的控制方案可以根据实际需求和系统要求选取。
三相笼型异步电动机正反转控制电路
三相笼型异步电动机正反转控制电路是用于控制三相笼型异步电动机的正反转运动的电路。
它由三相交流电源、三相电动机、正、反转按钮开关、接触器等元件组成。
正转控制电路中,控制电路的L1、L2、L3三条相线上依次连
接接触器K1、K2、K3。
正转按钮开关S1、S2、S3分别与控
制电路的L1、L2、L3相线相连,当按下正转按钮时,控制电
路的L1、L2、L3三条相线上的电流依次通过接触器K1、K2、K3流向电动机的U、V、W三个线圈,使电动机正转运动。
反转控制电路中同样连接控制电路的L1、L2、L3三条相线,
反转按钮开关S4、S5、S6分别与控制电路的L1、L2、L3相
线相连,当按下反转按钮时,控制电路的L1、L2、L3三条相
线上的电流依次通过接触器K3、K2、K1流向电动机的W、V、U三个线圈,使电动机反转运动。
通过对正反转按钮开关的控制,可以实现三相笼型异步电动机的正反转运动。
三相异步电动机正反转控制电路原理
三相异步电动机正反转控制电路通常采用交流接触器和翻转开关实现。
在交流电源接通后,翻转开关向正转或反转方向翻转,这会使得交流
接触器的接点闭合,将电源的三相电流输入到电动机的三个绕组中。
当电
动机开始运转时,它会产生旋转磁场,由于旋转磁场的转向与电机的接线
方式不同,电机的正/反转方向也会不同。
如果需要更精确地控制电机的正/反转,可以采用直流控制电路,使
用电子器件如晶闸管或MOSFET等来控制电机的电流方向和大小。
三相异步电动机正反转控制线路1.课题引入:(1)接触器联锁正反转控制线路的优点是工作安全可靠,缺点是操作不便。
因为电动机从正转变为反转时,必须先按下停止按钮后,才能按反转启动按钮,否则由于接触器的联锁作用,不能实现反转。
按钮联锁控制线路的缺点是容易产生电源两相短路故障。
例如:当正转接触器KMl发生主触头熔焊或被杂物卡住等故障时,即使KMl线圈失电,主触头也分断不开,这时若直接按下反转按钮SB2,KM2得电动作,触头闭合,必然造成电源两相短路故障。
所以采用此线路工作有一定的不安全隐患。
因此在实际工作中,经常采用的是按钮、接触器双重联锁的正反转控制线路。
按钮联锁控制线路原理图接触器联锁控制线路原理图(2)双重联锁控制线路的工作原理:1)双重联锁的定义:第一重是交流接触器常闭触头与对方的线圈相串联而构成的联锁。
另一重是复合按钮的常闭触头串联在对方的电路中而构成的联锁。
2)工作原理分析: 先合上电源开关QS :正转控制按下SB1SB1 常闭触头先分断对KM2联锁(切断反转控制电路)SB1常开触头后闭合线圈得电KM1自锁触头闭合自锁KM1主触头闭合KM1联锁触头分断对KM2联锁(切断反转控制电路)电动机M 启动连续正转11反转控制按下SB2SB2常闭触头先分断KM1线圈失电KM1自锁触头分断解除自锁KM1主触头分断电动机M 失电KM1联锁触头恢复闭合KM2线圈得电SB2常开触头后闭合KM2自锁触头闭合自锁KM2主触头闭合KM2联锁触头分断对KM1联锁(切断正转控制电路)若要停止,按下停止按钮SB3,整个控制电路失电,主触头分断,电动机 M 失电停转.电动机M 启动连续反转2233双重联锁控制线路原理图(3)双重联锁控制线路的自检步骤:安装完毕的控制线路板,必须经过认真检查以后,才允许通电试车,以防止错接、漏接造成不能正常运转或短路事故的发生。
1)按电路图或接线图从电源端开始,逐段核对接线及接线端子处线号是否正确,有无漏接、错接之处。