第2-2章:摄影测量解析基础及坐标转换
- 格式:pdf
- 大小:1.11 MB
- 文档页数:78

第一章1.摄影测量学:摄影测量是从非接触成像系统,通过记录、量测、分析与表达等处理,获取地球及其环境和其他物体的几何、属性等可靠信息的工艺、科学与技术。
1.2摄影测量学的任务:地形测量领域 :各种比例尺的地形图、专题图、特种地图 、正射影像地图、景观图 ;建立各种数据库 ;提供地理信息系统和土地信息系统所需要的基础数据 。
非地形测量领域:生物医学、公安侦破、古文物、古建筑、建筑物变形监测2.摄影测量的三个发展阶段及其特点:模拟摄影测量阶段:(1)使用的影像资料为硬拷贝像片。
(2)利用光学机械模拟装置,实现了复杂的摄影测量解算。
(3)得到的是(或说主要是)模拟产品。
(4)摄影测量科技的发展可以说基本上是围绕着十分昂贵的立体测图仪进行的。
(5)利用几何反转原理,建立缩小模型。
(6)最直观,好理解。
解析摄影测量阶段:(1)使用的影像资料为硬拷贝像片。
(2)使用的是数字投影方式,用精确的数字解算代替了精度较低的模拟解算。
(3)得到的是模拟产品和数字产品。
(4)引入了半自动化的机助作业, 因此,免除了定向的繁琐过程及测图过程中的许多手工作业方式。
但需要人用手去操纵(或指挥)仪器,同时用眼进行观测。
数字摄影测量阶段 :(1)使用的资料是数字化影像、(2)使用的是数字投影方式 。
(3)得到的是数字产品、模拟产品。
(4)它是自动化操作,加人员做辅助。
3.数字摄影测量与模拟、解析摄影摄影测量的根本区别在于:1.两者采用的原始原始资料不同,前者是是数字影像,后者是硬拷贝影像。
2.两者的投影方式不同,前者是数字投影,后者是物理投影。
3.两者的操作方式不同,前者是自动化,人员做辅助,后者是其本人人工进行。
第二章3.摄影测量学的航摄资料有哪些基本要求?答:1.航影仪应安装在飞机的一定角度,飞行航线一般为东西方向。
2.相邻两像片要有60%左右的重叠度,相邻两航线间要有30%左右的重叠度。
3.航摄机在摄影曝光的瞬间物镜主光轴保持垂直地面。
第一章绪论【1】摄影测量学:利用光学摄影机获取的像片,经过处理以获取被摄物体的形状、大小、位置、特性及其相互关系的一门学科【2】摄影测量分类:(1)按距离远近:航天摄影测量,航空,地面,近景,显微(2)按用途:地形,非地形(3)按处理手段:模拟,解析,数字。
【3】摄影测量特点:无需接触物体本身获得被摄物体信息,由二维影象重建三维目标,面采集数据方式,同时提取物体的几何与物理特性【4】发展趋势:传感器平台的多样化,无人机发展。
从对控制点的高度依赖走向无需地面控制点的摄影测量作业模式。
新型传感器的发展有望取代传统的胶片型传感器。
摄影测量软件平台的并行化与自能化。
多传感器的有效集成。
【5】影像数字化:用高精度影像数字化仪(扫描仪)将像片(负片或正片)转化为数字影像【6】(1)单像量测:特征提取与定位及交互量测(2)双像量测:影像匹配及交互立体量测(3)多像量测:多影像间的匹配及交互多影像量测【7】发展三阶段:(1)模拟摄影测量:用光学或机械投影的方法模拟摄影成像过程,用多个投影器恢复航摄仪位置和姿态,通过几何反转建立与实际地形表面成比例的几何模型,通过对几何模型的量测得到地形图和各种专题图件(2)解析摄影测量:以计算机为主要手段,通过对摄影像片的量测和解析计算方法的交会方式在建立像点坐标与物点坐标间的几何关系,而研究并确定被摄物体的形状,大小,位置,性质及相互关系,并提供各种摄影测量产品(3)数字摄影测量:基于摄影测量的基本原理,用计算机技术,数字图像处理,影像匹配,模式识别等多学科的理论和方法,从影像中提取所摄物体以数字方式表达的几何与物理信息。
第二章单幅影像解析基础【1】空中摄影:用竖直摄影方式,即摄影瞬间摄影机物镜主光轴近似与地面垂直。
【2】航空摄影:利用安装在航摄飞机上的航摄仪从空中一定角度对地面进行摄影【3】(1)航摄仪焦距:物镜节点到焦点的距离(2)像片主距:物镜后节点到像平面的距离(3)像场:物镜焦面上中央成像清晰的范围(4)像场角:像场直径对物镜后节点的夹角【4】摄影比例尺:把摄影像片当做水平像片,地面取平均高程,这时候像片上的线段l和地面上相应线段的水平距L之比。

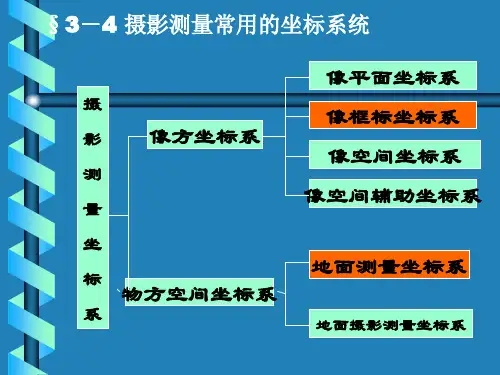
第二章--航空摄影测量的基本知识第二章航空摄影测量的基本知识主要内容1.航摄仪和感光材料2.航摄基本知识及其作用比例尺重叠度(航向旁向)相片偏角3.投影比较:类型特点第一节航空摄影仪与感光材料一、航空摄影仪指航空摄影机、地面摄影测量用的摄影经纬仪,以及近景摄影测量用的摄影机,简称摄影机。
主要由暗箱和镜箱构成。
1.镜箱物镜物镜筒座架框标平面镜箱体是一个可调节摄影物镜与像平面之间距离的封闭筒2.暗箱:3.框标平面:镜箱体后端为一金属框架,研磨成极为精确的平面作用:像点坐标量测3.框标坐标:在框标平面内区其交点作为坐标原点,建立起框标直角坐标系。
航摄软片紧密贴附在框标平面上,所以框标平面即为像平面的位置。
4.像主点:摄影机主光轴与像平面的交点5.摄影机主距(像片主距):摄影机物镜后节点到像片主点的垂距称为摄影机主距,也叫像片主距,一般用字母f表示。
二、分类(一)按摄影物镜焦距和像场角分为:1.短焦距航摄仪,f<150 mm,相应的像场角为β>100º;2.中焦距航摄仪f:150 mm<<300 mm,像场角为70º<β<100º;3.长焦距航摄仪f>300 mm,相应的像场角为2≤70º。
二、分类(二)按照像幅(正方形)大小分:1.短焦距航空摄影机的像幅多为18 cm×18 cm2.中焦距航空摄影机的像幅有18 cm×18 cm和23 cm×23 cm3.长焦距航空摄影机的像幅多为23 cm×23 cm和30 cm×30 cm第二节航空摄影测量对摄影资料的基本要求•测绘地形------摄影多采用竖直摄影方式,即航摄机在曝光瞬间物镜主光轴保持垂直于地面。
•《航空摄影测量规范》要求像片倾角应小于2º~3º。
竖直航空摄影:面积、带状和独立地块航空摄影三种。
面积航空摄影:主要用于测绘地形图或进行大面积资源调查。
摄影测量坐标系的确定与变换原理摄影测量是一种通过影像信息进行测量的技术方法,可以获得物体的几何形状和空间位置等相关数据。
在摄影测量中,坐标系的确定和变换原理是非常重要的一部分,它关系到测量结果的准确性和可靠性。
本文将探讨摄影测量坐标系的确定与变换原理,以及其在实际应用中的重要性。
一、摄影测量坐标系的确定1. 地球坐标系在摄影测量中,常用的坐标系是地球坐标系。
地球坐标系可以将地球表面上的点与地球椭球体上的点一一对应起来,从而确定点的位置。
在地球坐标系中,通常使用经度、纬度和椭球高度来表示点的位置。
2. 相对坐标系相对坐标系是相对于某一基准点或基准线确定的坐标系。
在摄影测量中,通常以某一个像点或光束作为基准点或基准线,确定相对坐标系。
相对坐标系的原点和坐标轴方向可以根据实际情况进行选择。
3. 图像坐标系图像坐标系是摄影测量中常用的坐标系,它以像平面上的某一点为原点,建立二维坐标系。
图像坐标系的x轴方向通常为像片的上方向,y轴方向为像片的右方向。
图像坐标系的单位通常为毫米或像素。
二、摄影测量坐标系的变换原理1. 内方位元素内方位元素是将图像坐标系与相对坐标系相互联系的元素。
它包括旋转角、焦距和像点坐标。
通过内方位元素的确定,可以将图像坐标系的点与相对坐标系的点一一对应起来。
2. 外方位元素外方位元素是将相对坐标系与地球坐标系相互联系的元素。
它包括摄影机在空间中的位置和方向信息。
通过外方位元素的确定,可以将相对坐标系的点与地球坐标系的点一一对应起来。
3. 坐标系的变换坐标系的变换是将图像坐标系中的点投影到地球坐标系中的过程。
在进行坐标系的变换时,需要根据内方位元素和外方位元素的信息,通过一定的数学公式进行计算。
坐标系的变换原理可以用几何投影的方式来理解。
在坐标系变换的过程中,通过将图像坐标系的点向地球坐标系上的相应点进行投影,从而确定点的位置。
三、摄影测量坐标系的应用摄影测量坐标系的确定和变换原理在实际应用中有着广泛的应用。
测绘技术中的摄影测量处理原理解析摄影测量是一门应用于测绘技术的重要方法,它通过对影像进行处理和分析来获取地物的空间位置和形状信息。
摄影测量处理原理是实现这一目标的关键。
本文将对摄影测量处理原理进行解析,以便更好地理解和应用这一技术。
一、摄影测量的基本原理摄影测量是利用相机对地面影像进行拍摄,并通过一系列的处理手段,从而获取地物的空间坐标和形状信息的技术方法。
从数学角度来看,摄影测量可以通过解析几何学和立体视觉原理来解释。
在摄影测量过程中,首先需要对摄影机进行内外定向元素的标定。
内定向包括焦距、主点位置和畸变参数等,它们用于将相机坐标系中的点投影到成像平面上。
外定向则是指相机的空间位置和姿态参数,它们用于确定相机坐标系与地面坐标系之间的转换关系。
然后,通过在地面上设置控制点,并进行摄影测量影像的控制测量,可以建立起像点坐标与地面坐标之间的对应关系。
这一关系可以通过影像的几何校正和点的匹配来实现。
最后,在确定了像点坐标与地面坐标之间的对应关系后,就可以根据影像的几何关系,通过立体视觉原理进行三维地物信息的提取和生成。
这一过程包括三维重建、高程测量、地物形状提取等步骤。
二、摄影测量处理的关键技术在摄影测量处理过程中,涉及到一些关键的技术方法,如摄影测量影像的几何校正、像点匹配和三维重建等。
下面将对这些技术进行一一解析。
1. 摄影测量影像的几何校正摄影测量影像的几何校正是指通过摄影测量的测量数据,对影像进行几何校正和坐标转换,将像点坐标与地面坐标对应起来的过程。
这个过程包括影像的畸变校正和碰撞矫正等步骤。
影像的畸变校正主要是针对摄影机内的径向和切向畸变进行矫正,以恢复影像的几何形状。
而碰撞校正则是指通过测量影像中的控制点,将像平面坐标和地面坐标之间的几何关系确定下来,从而实现准确的影像纠正。
2. 像点匹配像点匹配是摄影测量处理的关键步骤之一,它是将摄影测量影像中的像点与对应的地面点进行关联的过程。
这一步骤包括影像的块匹配和子像素匹配等。
摄影测量学第一章绪论1、摄影测量是从非接触成像系统,经过记录、量测、解析与表达等办理,获取地球及其环境和其他物体的几何、属性等可靠信息的工艺、科学与技术。
2、摄影测量学的三个睁开阶段:模拟摄影测量、解析摄影测量、数字摄影测量3、摄影测量三个睁开阶段的特点:4、摄影测量存在哪些问题第二章单幅影像解析基础1、像主点:摄像机主光轴〔摄影方向〕与像平面的交点,称为像片主点。
像主距:摄像机物镜后节点到像片主点的垂距称为摄像机主距,也叫像片主距〔f〕。
2、航空摄影:利用安装在航摄飞机上的航摄仪,在空中以预定的翱翔高度度沿着早先拟定好的航线翱翔,按必然的时间间隔进行曝光摄影,获取整个测区的航摄像片。
空中摄影采用竖直摄影方式,即摄影刹时摄像机物镜主光轴近似与地面垂直。
1lfmL H〔m—像片比率尺分母,f—摄像机主距,H—平均高程面的摄影高度H=m・f〕3、相对航高是指摄像机物镜有对于某一基准面的高度,称为摄影航高。
绝对航高是有对于平均海平面的航高,是指摄像机物镜在摄影刹时的真实海拔高。
经过相对航高H与摄影地区地面平均高度H地计算获取:H绝二日+H4、航空摄影与成图比率尺的关系5、航向重叠:同一条航线内相邻像片之间的影像重叠称,重叠度一般要求在60%以上;旁向重叠:两相邻航带像片之间的影像重叠,重叠度要求在30%左右。
6、中心投影:当投影汇聚于一点时,称为中心投影;正射投影:投隐射线与投影平面成正交。
中心投影:投隐射线汇聚于一点〔投隐射线的汇聚点称投影中心〕投影斜投影:投隐射线与投影平面成斜交I平行投影II正射投影:投隐射线与投影平面成正交7、透视变换中的重要的点线面:① 由投影中心作像片平面的垂线,交像面于o ,称为像主点;像主点在地面上的对应点以 O 表示,称为地主点。
② 由摄影中心作铅垂线交像片平面于点n ,称为像底点;此铅垂线交地面于点N ,称为地 底点。
③ 过铅垂线SnN 和摄影方向SoO 的铅垂面称为主垂面〔W 〕,主垂面即垂直于像平面P , 又垂直于地平面E ,也垂直于两平面的交线透视轴TT 。