直流电机驱动器件选型
- 格式:pdf
- 大小:90.09 KB
- 文档页数:16
直流有刷/无刷DC电机的优缺点及选型注意事项随着对低能耗、高安全性、高可靠性和精确控制的需求不断提升,工业自动化的工业驱动日趋复杂,需要尖端的电机技术的支持。
本期大讲台将详细解读直流有刷电机和直流无刷电机的优缺点、设计要素等相关内容。
有刷DC电机刷式直流电机是现有历史最久的电机拓扑之一。
它们将固定刷子安装在定子机座上,摩擦转子上的换向片,而后者又连接至旋转的线圈段。
随着电机旋转,不同转子线圈不断连接和断开,这样转子产生的净磁场相对于定子机座就是固定的,且通过定子磁场正确定向,从而产生扭矩。
当换向片旋转过刷子时,这些特定转子线圈段的电触头将会断开。
由于转子线圈是电感的,而电感器生成高回扫电压来抵抗电流变化,因此刷子和断开的换向片之间会产生火花。
这些火花会导致很多负面结果,如电噪声、效率降低,以及某些情况下的危险操作。
此外,刷子必须安装弹簧来抵抗换向片,以确保电接触良好。
这进一步降低了效率,需要定期维护更换刷子。
尽管有诸多劣势,但刷式直流电机有一显著优势:成本。
由于控制刷式直流电机相对简单,因此还广泛用于系统成本是主要驱动因素的应用中。
在使用永久磁性生成定子磁通的拓扑中,产生的速度/扭矩曲线非常有线性特征。
因此,刷式直流电机历来常用于工业伺服应用,速度和扭矩分别与所应用的电压和电流成正比。
但是,半导体器件的跌价使得电源转换和控制的成本降低。
因此,许多直流电机被交流电机所取代,后者带来了效率和可靠性提高等优势。
刷式直流电机的主题多种多样,如直流并联电机和通用电机,两者都使用定子线圈代替永久磁性。
在直流并联电机中,定子线圈与转子电路并联;而在通用电机中,定子线圈与转子串联。
通用电机在家电应用中尤其常用,因为它具有高启动扭矩,可以高速运行。
只需添加串联晶闸管并进行交流相位控制,便可轻松对通用电机进行速度控制。
但是,刷子/换向器结构常见于这些电机类型,因此它们具有标准PM 刷式直流电机相同的劣势。
无刷直流电机(BLDC)。
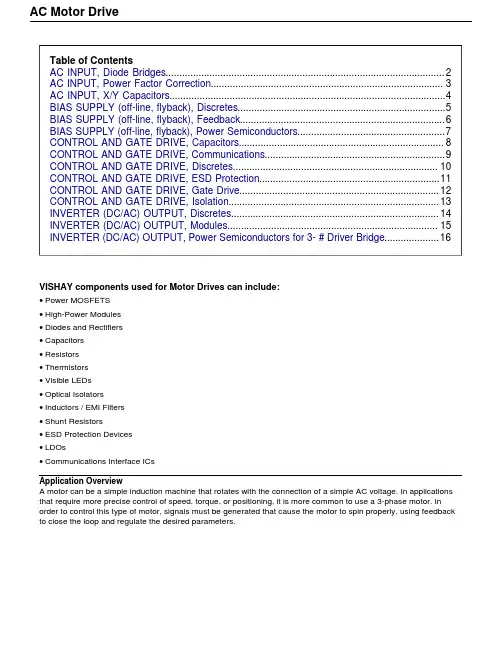
AC Motor DriveTable of ContentsAC INPUT, Diode Bridges (2)AC INPUT, Power Factor Correction (3)AC INPUT, X/Y Capacitors (4)BIAS SUPPLY (off-line, flyback), Discretes (5)BIAS SUPPLY (off-line, flyback), Feedback (6)BIAS SUPPLY (off-line, flyback), Power Semiconductors (7)CONTROL AND GATE DRIVE, Capacitors (8)CONTROL AND GATE DRIVE, Communications (9)CONTROL AND GATE DRIVE, Discretes (10)CONTROL AND GATE DRIVE, ESD Protection (11)CONTROL AND GATE DRIVE, Gate Drive (12)CONTROL AND GATE DRIVE, Isolation (13)INVERTER (DC/AC) OUTPUT, Discretes (14)INVERTER (DC/AC) OUTPUT, Modules (15)INVERTER (DC/AC) OUTPUT, Power Semiconductors for 3- # Driver Bridge (16)VISHAY components used for Motor Drives can include:• Power MOSFETS• High-Power Modules• Diodes and Rectifiers• Capacitors• Resistors• Thermistors• Visible LEDs• Optical Isolators• Inductors / EMI Filters• Shunt Resistors• ESD Protection Devices• LDOs• Communications Interface ICsApplication OverviewA motor can be a simple induction machine that rotates with the connection of a simple AC voltage. In applicationsthat require more precise control of speed, torque, or positioning, it is more common to use a 3-phase motor. In order to control this type of motor, signals must be generated that cause the motor to spin properly, using feedback to close the loop and regulate the desired parameters.AC Motor Drive : AC INPUT, Diode Bridges Single PhaseThree PhaseAC Motor Drive : AC INPUT, Power Factor Correction Bulk CapacitorInductorPFC fast diodePFC MOSFETPFC pre-charge diodeShunt resistorAC Motor Drive : AC INPUT, X/Y Capacitors Film RFI capsInductorMultilayer Ceramic Chip CapacitorsShunt resistorTantalum CapacitorsTransformerTVS and ESD protectionAC Motor Drive : BIAS SUPPLY (off-line, flyback), Power Semiconductors Flyback DiodeFlyback SwitchAC Motor Drive : CONTROL AND GATE DRIVE, Capacitors Multilayer Ceramic Chip CapacitorsTantalum CapacitorsAC Motor Drive : CONTROL AND GATE DRIVE, Communications Communication Bus Interface ICAC Motor Drive : CONTROL AND GATE DRIVE, Discretes Feedback ResistorsLED indicatorsLinear Reg for Encoder PowerSwitching diodeZener clamp diodesAC Motor Drive : CONTROL AND GATE DRIVE, ESD Protection ESD Protection DiodesCeramic HF Decoupling CapacitorsDe-Saturation diodesElectrolytic capsFilm capsShunt resistorTemp SensorUltrafast Bootstrap diodesHigh Power ModuleAC Motor Drive : INVERTER (DC/AC) OUTPUT, Power Semiconductors for 3- # Driver Bridge Braking or Inverter SwitchHigh Power ModuleRecirculating Diodes。
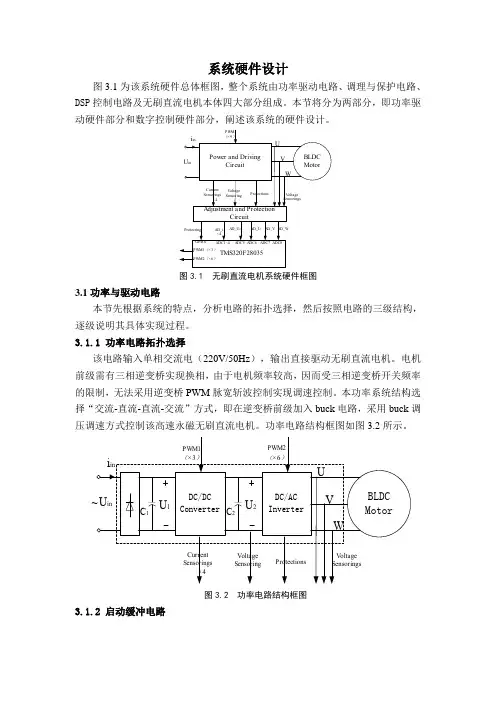
系统硬件设计图3.1为该系统硬件总体框图,整个系统由功率驱动电路、调理与保护电路、DSP控制电路及无刷直流电机本体四大部分组成。
本节将分为两部分,即功率驱动硬件部分和数字控制硬件部分,阐述该系统的硬件设计。
图3.1 无刷直流电机系统硬件框图3.1功率与驱动电路本节先根据系统的特点,分析电路的拓扑选择,然后按照电路的三级结构,逐级说明其具体实现过程。
3.1.1 功率电路拓扑选择该电路输入单相交流电(220V/50Hz),输出直接驱动无刷直流电机。
电机前级需有三相逆变桥实现换相,由于电机频率较高,因而受三相逆变桥开关频率的限制,无法采用逆变桥PWM脉宽斩波控制实现调速控制。
本功率系统结构选择“交流-直流-直流-交流”方式,即在逆变桥前级加入buck电路,采用buck调压调速方式控制该高速永磁无刷直流电机。
功率电路结构框图如图3.2所示。
图3.2 功率电路结构框图3.1.2 启动缓冲电路图 3.2中第一级采用二极管不控整流,再用大电容滤波后得稳定直流电压1U 。
电路上电时,由于电容1C 两端电压不能突变,上电产生瞬间的大电流给其充电,该电流太大将造成1C 损坏。
为此,电路中加入了启动缓冲电路。
如下图3.3所示,上电时晶闸管1Q 尚未导通,通过11R C 串联回路给1C 充电,充电电流较小,1U 缓慢上升,电容受到保护。
再利用电阻2R 、3R 对1U 分压采样,当1U 上升到约输入电压峰值的90%时,采样电压1s U 将超过设定的门限电压TH U ,通过比较器后驱动光耦,从而触发晶闸管导通。
晶闸管导通后,1R 被短路,电路进入正常工作状态。
此后向后级供电的过程中,晶闸管一直导通,2R 、4R 的阻值非常大,不对后级产生影响。
后级关断或电路掉电时,1Q 关断,4R 为1C 提供放电回路。
图中TH U 由CC V +经电阻分压得到,而CC V +是由/AC DC 模块电源获得。
G AU 1s U Q 1图3.3 启动缓冲电路示意图3.1.3 直流-直流变换该环节实现调压调速功能,直接利用Buck 变换器降压,但电机满载时该电路输出电流很大,所需输出滤波电感太大。

G2新一代直流伺服电机选型手册2020年上市.小型化.性能优化.精准应用智能物流·医疗影像·工业机器人前言本手册对G2系列电机的选型、安装、连接、维护所需的信息进行了说明。
为了正确使用该系列电机,请认真阅读本手册G2系列直流永磁同步伺服电动机拥有自主知识产权。
采用高性能稀土永磁材料,具有低惯量,高功率密度,超强过载能力,极低转矩脉动,低噪音,外观精美等突出优点。
●适应恶劣环境,高性价比。
●高性能稀土永磁转子,高转矩低惯量,动态响应好。
●三相正弦波设计,具有极好的低速平滑特性。
●F级绝缘。
●增量编码器、绝对值编码器可选。
●IP65的高防护等级,方便快速的线缆连接方式。
版本变更记录日期变更后版本变更内容2021年7月A00第一版发行目录前言 (1)版本变更记录 (1)目录 (2)第1章产品信息 (3)1.1电机铭牌与型号说明 (3)1.2部件说明 (5)1.3通用规格 (6)1.3.1电机的机械特性 (6)1.3.2电机的过载特性 (7)1.3.3电机的降额特性 (8)1.3.4安全注意事项 (9)第2章电机选型 (12)2.1选型说明 (12)2.2SMH标准系列 (13)40法兰电机 (13)SMH040—00530B10☐☐☐☐ (13)SMH040—01030B10☐☐☐☐ (14)SMH040—00530C10☐☐☐☐ (15)SMH040—01030C10☐☐☐☐ (16)SMH040—00530D10☐☐☐☐ (17)SMH040—01030D10☐☐☐☐ (18)60法兰电机 (19)SMH060—02030B10☐☐☐☐ (19)SMH060—04030B10☐☐☐☐ (20)SMH060—02030D10☐☐☐☐ (21)SMH060—04030D10☐☐☐☐ (22)SMH060—06030D10☐☐☐☐ (23)80法兰电机 (24)SMH080—04030B10☐☐☐☐ (24)SMH080—06030B10☐☐☐☐ (25)SMH080—07530B10☐☐☐☐ (26)SMH080—04030D10☐☐☐☐ (27)SMH080—06030D10☐☐☐☐ (28)SMH080—07530D10☐☐☐☐ (29)SMH080—10030D10☐☐☐☐ (30)第3章线缆连接 (31)3.1动力线连接 (31)3.2制动器连接 (31)3.3编码器连接 (32)3.3.1增量编码器类型:磁电、光电 (32)3.3.2绝对值编码器:光电 (32)第1章产品信息1.1电机铭牌与型号说明·``·图1-1电机型号与铭牌信息SM H060—2030D 10E0B L —M 01标识极数1010标识编码器标识编码器S0分体光学单圈绝对值17bit(NRZ)A0分体光学多圈绝对值S1分体光学单圈绝对值20bit(Nikon)A1分体光学多圈绝对值S2分体光学单圈绝对值23bit(NRZ)A2分体光学多圈绝对值S3整体光学单圈绝对值17bit(NRZ)A3整体光学多圈绝对值S4整体光学单圈绝对值20bit(Nikon)A4整体光学多圈绝对值16/20bit S5整体光学单圈绝对值23bit(NRZ)A5整体光学多圈绝对值16/23bit E0光电2500线增量M0磁电2500线增量R0旋转变压器(一对极)同步电机标识产品系列H H 系列C C 系列S S 系列R R 系列标识额定功率标识×10020200W 标识额定转速标识×100303000rpm标识额定电压A 10-19V(DC)B 20-29V(DC)C 30-39V(DC)D 40-49V(DC)E 60-69V(DC)F 70-79V(DC)G 80-89V(DC)H 90-99V(DC)1110V(AC)2220V(AC)3380V(AC)标识机座号04040法兰06060法兰08080法兰标识改制代码M 只改制电机本体部C 只改制除电机本体T电机本体与连接部标识制动装置L 直接引出线M 国产航插C 进口航插标识制动装置B带制动器N不带制动器标识改制流水码01011.2部件说明40/60/80基座参考如图1-2部件说明示意图图1-2导线型电机部件说明示意图编号部件名称①动力线连接器②动力线缆③编码器连接器④编码器线缆⑤轴伸(含键)⑥安装法兰面⑦编码器1.3通用规格1.3.1电机的机械特性项目描述耐热等级F级绝缘电阻DC500V,10MΩ以上绝缘耐压AC300V1分钟(24V) AC500V1分钟(36V) AC1000V1分钟(48V)励磁方式永磁式安装方式法兰式振动等级V15工作制S1存储温度-20℃~40℃使用环境湿度20%~90%RH(不结露)壳体防护方式IP65(轴伸及线缆端除外)旋转方向正转指令下从负载一侧观察时,逆时针旋转(CCW)振动49m/s2以下冲击490m/s2以下海拔1000m以下,1000m以上降额使用,具体参见海拔降额曲线负载比例(%)运行时间(S) 1203001301051405315036160271702318019.5190172001421012220102308.52407.82507260 6.5270 6.1280 5.7290 5.33005图1-3电机过载曲线⏹海拔降额曲线⏹高温降额曲线1.3.4安全注意事项安全声明⏹在安装、操作、维护设备时,请先阅读并遵守本安全注意事项。
直流无刷电机驱动IC版本号:V1.0 日期:2013年5月28日一.特色:三.封装形态二.简介:● 军工品质,工作稳定● 用于有霍尔/无霍尔无刷电机驱动 ● 正/反转控制,软切换功能 ● 转速线性调节 ● 过流保护 ● 短路保护 ● 欠压保护● DSP 核H_PWM 驱动低噪音●JYKJ 特有技术,保证了在任何工况下电机都能正常运转● 有霍尔与无霍尔应用自动识别功能 ●外围电路简单,使用方便JY01A 是一款多功能的无刷电机驱动IC ,可用于有霍尔、无霍尔无刷电机驱动。
具备调速,正反转,过流保护,短路保护,欠压保护等功能,军工级品质,工作稳定,防干扰能力强等特点。
四.电气特性:(一)绝对最大额定值V DD………………………………………………………………………………相对于GND+5.5V 所有输入电压…………………………………………………………GND-0.5V—VDD+0.5V 所有吸入输出电流………………………………………………………… IOL/8mA,IOH/5mA 工作温度…………………………………………………………………………………-40℃~85℃储存温度…………………………………………………………………………………-50℃~125℃(二)直流特性符号符号描述最小值典型值最大值单位条件V DD电源 4.55 5.5V正常工作环境下V IL 输入IO低电平00.3V TTL电平V IH 输入IO高电平35 5.5V TTL电平IOL低电平吸入电流58mA TTL电平IOH高电平输出电流35mA TTL电平Vjd模拟输入电平05V模拟输入电平范围Ijd模拟输入电流100nA模拟输入电流值五.引脚功能参数六.应用方案○a有霍尔直流无刷电机应用方案○b无霍尔直流无刷电机应用方案注:●Ha,Hb,Hc输入端,内有上拉电阻,约30KΩ左右●电流检测回路,一般应用Ri =10K,Ci = 104P,电流采样电阻R选值参考 R =0.05/( W/V) 式中:0.05常数,W 电机功率,V 工作电压如:工作电压12V,电机功率 30W R =0.02( 20mΩ)●在无霍尔驱动中,反电动势信号经过L339处理后的相位不能搞错(MA—Ha;MB—Hb;MC—Hc)●驱动门电路,建议使用IR2101S做为驱动门,起到隔离与电平转换作用●VCC电源滤波电容 C,一般按 C = W/V*100 式中:C 单位 uF W电机功率 V工作电压 100常数如:工作电压12V 电机功率 10W 实际C = 83uF 按照滤波电容的选型原则,向上选用标称值 为100uF电容。
地铁自动门毕业设计目录绪论 (1)一、自动门系统方案 (2)(一)设计思想和整体框图 (2)(二)器件选型 (2)二、自动门系统的硬件设计 (7)(一)系统硬件整体逻辑设计 (7)(二)控制器单元的硬件设计 (7)(三)直流电机驱动模块 (17)三、软件设计 (24)(一)整体程序流程图及功能模块设计 (24)(二)PWM信号发生及转速测量模块程序设计 (25)结论 (32)参考文献 (34)致谢 ................................................................................ 错误!未定义书签。
绪论现代社会是一个快速发展的信息化社会,随着科学技术的不断进步,人们不断去追求舒适,方便的生活环境。
于是相应的电子产品产生,智能型自动门同样出现在人们的生活中。
随着自动门的技术、性能日趋成熟、完善,它被广泛应用在政府机关、银行、医院、商业、工业等不同行业,改善了人们的生产生活条件。
自动门不但能给我们带来人员出入方便、节约空调能源、防风、防尘、防噪音等好处,更令我们的建筑物增添了不少高贵典雅的气息。
自动门是指可以将人接近门的动作(或将某种入门授权)识别为开门信号的控制单元,通过驱动系统将门开启,在人离开后再将门自动关闭,并对开启和关闭的过程实现控制的系统。
按启闭形式分:可分为推拉门、平开门、折叠门和旋转门;按门体的材料分:不锈钢门有安全玻璃、不锈钢饰面、建筑铝合金型材、彩色涂层钢板、木材等。
自动门的系统配置是指根据使用要求而配备的,与自动门控制器相连的外围辅助控制装置,如开门信号源、门禁系统、安全装置、集中控制等。
必须根据建筑物的使用特点。
通过人员的组成,楼宇自控的系统要求等合理配备辅助控制装置。
一、自动门系统方案(一)设计思想和整体框图本设计主要应用单片机程序对直流伺服电机的正转、反转进行控制,从而对门进行开、关的控制。
在门的两侧各有一个感应器,分别感应从里面出去和从外面进来的人。
南通纺织职业技术学院毕业论文设计基于ATMEGA8直流电机测速系统设计高瑶班级:09电子信息专业:电子信息工程技术教学系:机电系指导老师:邱宏完成时间2018年9月至2018年12月目录摘要 (2)一引言 (3)1、直流电机的应用与特点 (4)2、文章的选题意义 (4)3、文章的主要内容 (4)二任务分析与方案确定 (5)1、设计的目标任务 (5)2、设计的总体方案 (5)三硬件电路设计 (6)1、电源电路 (6)2、单片机电路 (7)3、显示电路 (9)4、整体电路 (11)四软件设计 (13)1、软件设计方案 (13)2、功能模块子程序 (14)五软硬件系统调试 (21)1、硬件调试 (21)2、软件调试 (22)小结 (24)六参考文献 (26)基于ATMEGA8的直流电机调速系统的设计摘要:文章介绍了一种直流电机测速系统的设计过程,首先明确设计任务、提出了电路设计的总体方案,接着介绍硬件电路主要功能模块的作用、电路结构原理、及关键元件的选型与参数;然后是系统的软件设计,分析了软件所要实现的功能、并画出软件的方案流程图,给出了几个软件功能模块的子程序;最后是系统的调试部分,包括硬件软件调试的一般过程,并且结合本设计的具体,对开发过程中出现的一些问题现象及调试解决的过程进行了阐述。
关键词:直流电机测速ATMEGA8 MAX7219一引言1.直流电机的应用与特点直流伺服电机常常用于实现精密调速和位置控制随动系统中,在工业、国防和民用等领域内到广泛应用,特别是火炮稳定系统、舰载平台、雷达天线、机器人控制等场合。
直流电机由于具有速度控制容易, 启动、制动性能良好,平滑调速范围宽等特点, 在冶金、机械制造、轻工等工业部门中得到广泛应用。
早期直流电动机的控制均以模拟电路为基础, 控制系统的硬件部分非常复杂,功能单一,而且系统非常不灵活、调试困难, 阻碍了直流电动机控制技术的发展和应用范围的推广。
随着单片机技术的日新月异,使许多控制功能及算法可以采用软件技术来完成,不但为直流电动机的控制提供了更大的灵活性,而且使系统能达到更高的性能, 从而大大降低了系统成本,有效地提高了工作效率。
目录1.直流脉宽调速系统驱动电源 (1)1.1任务和意义 (1)1.2技术指标 (1)1.3设计内容 (1)2.脉宽调制技术 (1)2.1脉宽调速系统的控制电路: (2)2.2脉冲宽度调制器: (2)2.3直流脉宽调制放大器工作原理 (3)2.4脉宽调制优点 (3)2.5电路参数及选型 (4)3.直流脉宽调速实验原理 (5)3.1 SG3525A脉宽调制器控制电路简介 (5)3.2 SG3525A内部结构和工作特性 (5)3.3 IC芯片的工作 (7)3.4脉宽调速系统的开环机械特性 (7)4.主电路设计说明 (8)4.1主电路的选择 (8)4.1.1简要概述 (8)4.2设计说明 (10)5.简要概述 (11)5.1设计说明 (11)5.2.1控制电路的选择 (13)5.2.2驱动电路的选择 (14)6.调速系统各部分功能 (17)6.1 欠压锁定功能 (17)6.2系统的故障关闭功能 (17)6.3软起动功能 (17)7.仿真电路模块 (17)总结 (19)附录:主电路和控制电路 (20)1.直流脉宽调速系统驱动电源1.1任务和意义生产实习的主要任务是设计一个直流电动机的脉宽调速(直流PWM)驱动电源。
纵观运动控制的发展历史,交、直流两大电气传动并存于各个应用领域。
由于直流电机的调速性能和转矩控制性能好,20世纪30年代起就开始使用直流调速系统。
直流调速系统由最早的旋转变流机组控制,发展为用静止的晶闸管变流装置和模拟控制器实现调速,到现在由大功率开关器件组成的PWM电路实现数字化的调速,系统的快速性、可靠性、经济性不断提高,应用领域不断扩展。
尽管目前对交流系统的研究比较“热门”,但是其控制性能在某些方面还达不到直流PWM系统的水平。
直流PWM控制技术作为一门新型的控制技术,其发展潜力还是相当大的。
而且,直流PWM技术是电力电子领域广泛采用的各种PWM技术的典型应用和重要基础,掌握直流PWM技术对于学习和运用交流变频调速中SPWM技术有很大的帮助和借鉴作用。

5个电机选型步骤,易学易用电机选型需要的基本内容有:所驱动的负载类型、额定功率、额定电压、额定转速、其他条件。
一、所驱动的负载类型这个得反过来从电机特点说。
电机可以简单划分为直流电机和交流电机,交流又分为同步电机和异步电机。
1、直流电机直流电机的优点是可以方便地通过改变电压调节转速,并可以提供较大的转矩。
适用于需要频繁调节转速的负载,如钢厂的轧机,矿山的提升机等。
但现在随着变频技术的发展,交流电机也可以通过改变频率来实现调节转速。
不过虽然变频电机价格比普通电机贵不了多少,但变频器价格在整套设备中占据主要部分,所以直流电机还有一个优点是便宜。
直流电机的缺点在于结构复杂,任何设备只要结构复杂,必然导致故障率增加。
直流电机相比于交流电机,除了绕组复杂(励磁绕组、换向极绕组、补偿绕组、电枢绕组),还增加了滑环、电刷和换向器。
不仅对制造商的工艺要求高,而且后期维护成本也相对较高。
因此直流电机在工业应用中是处在一个逐渐没落但过渡阶段仍有用武之地的尴尬境地。
如果用户资金比较充裕的话,建议选择交流电机配变频器的方案,毕竟使用变频器也带来很多好处,这个不细说了。
2、异步电机异步电机的优点在于结构简单,性能稳定,维护方便,价格便宜。
且制造工艺上也是最简单的,曾听车间的老技师说过,装配一台直流电机的所用工时,可以完成差不多功率的两台同步电机或者四台异步电机,由此可见一斑。
因此异步电机在工业中得到了最广泛的应用。
异步电机又分为鼠笼型电机和绕线型电机,其区别在于转子。
鼠笼型电机转子由金属条制成,铜制或铝制。
铝的价格比较低,我国又是铝矿大国,在要求不高的场合应用广泛。
但铜的机械性能和导电性能都好于铝,就我所接触的绝大部分都是铜制转子。
鼠笼型电机在工艺上解决了断排的问题后,可靠性远远超过绕组型转子的电机。
而其缺点在于,金属转子在旋转的定子磁场中切割磁感线获得的转矩较小,且起动电流较大,对起动力矩要求较大的负载难以胜任。
尽管增加电机铁心长度可以获得更多的转矩,但力度十分有限。
有刷直流马达驱动电路MX612 有刷直流马达驱动电路MX612概述该产品为电池供电的玩具、低压或者电池供电的运动控制应用提供了一种集成的有刷直流马达驱动解决方案。
电路内部集成了采用N沟和P沟功率MOSFET设计的H桥驱动电路,适合于驱动有刷直流马达或者驱动步进马达的一个绕组。
该电路具备较宽的工作电压范围(从2V到10V),最大持续输出电流达到1.2A,最大峰值输出电流达到2.5A。
该驱动电路内置过热保护电路。
通过驱动电路的负载电流远大于电路的最大持续电流时,受封装散热能力限制,电路内部芯片的结温将会迅速升高,一旦超过设定值(典型值150℃),内部电路将立即关断输出功率管,切断负载电流,避免温度持续升高造成塑料封装冒烟、起火等安全隐患。
内置的温度迟滞电路,确保电路恢复到安全温度后,才允许重新对电路进行控制。
特性●低待机电流(小于0.1uA);●低静态工作电流;●集成的H桥驱动电路;●内置防共态导通电路;●低导通内阻的功率MOSFET管;●内置带迟滞效应的过热保护电路(TSD);●抗静电等级:3KV (HBM)。
典型应用● 2-6节AA/AAA干电池供电的玩具马达驱动;● 2-6节镍-氢/镍-镉充电电池供电的玩具马达驱动;● 1-2节锂电池供电的马达驱动引脚排列 引脚定义功能框图注:D A JAT A表示电路工作的环境温度,θJA为封装的热阻。
150℃表示电路的最高工作结温。
(2)、电路功耗的计算方法: P =I2*R其中P为电路功耗,I为持续输出电流,R为电路的导通内阻。
电路功耗P必须小于最大功耗P D(3)、人体模型,100pF电容通过1.5KΩ 电阻放电。
注:(1)、逻辑控制电源VCC与功率电源VDD内部完全独立,可分别供电。
当逻辑控制电源VCC掉电之后,电路将进入待机模式。
(2)、持续输出电流测试条件为:电路贴装在PCB上测试,SOP8封装的测试PCB板尺寸为25mm*15mm。
电特性参数表测试原理图PMOS体二极管导通电压测试原理图NMOS体二极管导通电压测试原理图时间参数测试原理图时间参数定义MX612电特性曲线典型应用线路图图1 MX612典型应用线路图特别注意事项:图1中的功率电源VDD对地去耦电容(C1)容值应根据具体的应用调整,VDD电压越高,输出峰值电流越大,C1取值越大,但是电容C1的取值至少需要4.7uF。
电动机知识电机驱动芯片LMD18200原理及应用1、主要性能l 峰值输出电流高达6A,连续输出电流达3A;l 工作电压高达55V;l Low RDS(ON) typically 0.3W per switch;l TTL/CMOS兼容电平的输入;l 无“shoot-through”电流;l 具有温度报警和过热与短路保护功能;l 芯片结温达145℃,结温达170℃时,芯片关断;l 具有良好的抗干扰性。
2、典型应用l 驱动直流电机、步机电机l 伺服机构系统位置与转速l 应用于机器人控制系统l 应用于数字控制系统l 应用于电脑打印机与绘图仪3、内部结构和引脚说明LMD18200外形结构如图1所示,内部电路框图2如图所示。
它有11个引脚,采用TO-220和双列直插式封装。
各引脚的功能如下:引脚名称功能描述1、11桥臂1,2的自举输入电容连接端在脚1与脚2、脚10与脚11之间应接入10uF的自举电容2、10H桥输出端3方向输入端转向时,输出驱动电流方向见表1。
该脚控制输出1与输出2(脚2、10)之间电流的方向,从而控制马达旋转的方向。
4刹车输入端刹车时,输出驱动电流方向见表1。
通过该端将马达绕组短路而使其刹车。
刹车时,将该脚置逻辑高电平,并将PWM信号输入端(脚5)置逻辑高电平,3脚的逻辑状态决定于短路马达所用的器件。
3脚为逻辑高电平时,H桥中2个高端晶体管导通;3脚呈逻辑低电平时,H桥中2个低端晶体管导通。
脚4置逻辑高电平、脚5置逻辑低电平时,H 桥中所有晶体管关断,此时,每个输出端只有很小的偏流(1.5mA)。
5PWM信号输入端PWM信号与驱动电流方向的关系见表1。
该端与3脚(方向输入)如何使用,决定于PWM信号类型。
6、7电源正端与负端8电流取样输出端提供电流取样信号,典型值为377 A/A。
9温度报警输出温度报警输出,提供温度报警信号。
芯片结温达145℃时,该端变为低电平;结温达170℃时,芯片关断。
第1篇一、面试背景随着现代电子技术的发展,功率器件在工业、交通、通信等领域扮演着越来越重要的角色。
作为功率器件设计师,需要具备扎实的理论基础、丰富的实践经验以及创新设计能力。
本面试题目旨在考察应聘者对功率器件设计的理解、应用能力以及解决问题的能力。
二、面试内容第一部分:基础知识与理论1. 请简述功率器件的定义及其在电子系统中的作用。
2. 解释什么是功率半导体,列举常见的功率半导体材料及其特性。
3. 描述MOSFET、IGBT和GTR这三种功率器件的结构、工作原理及其主要应用场景。
4. 解释什么是开关频率、导通压降、饱和压降等功率器件的关键参数,并说明它们对器件性能的影响。
5. 介绍功率器件的散热设计原则,包括热阻、热沉、散热器等。
第二部分:功率器件设计6. 请详细描述功率器件设计的一般流程,包括需求分析、方案设计、仿真验证、PCB设计、样品制作与测试等环节。
7. 针对以下场景,设计一款适合的功率器件:- 需要设计一款用于新能源汽车的电池管理系统中的DC/DC转换器,要求高效率、高可靠性、小体积。
- 需要设计一款用于工业控制系统的逆变器,要求高功率密度、宽输入电压范围、低谐波含量。
8. 请简述功率器件设计中常见的电磁兼容(EMC)问题,并说明如何解决这些问题。
第三部分:实际案例分析9. 请分析以下功率器件设计案例,并总结其设计要点:- 案例一:某公司设计的用于太阳能光伏发电系统的最大功率点跟踪(MPPT)控制器,采用MOSFET作为开关器件。
- 案例二:某公司设计的用于风力发电系统的变频器,采用IGBT作为开关器件。
10. 请结合实际项目经验,阐述您在功率器件设计中遇到的挑战及解决方案。
第四部分:创新与展望11. 请谈谈您对功率器件设计未来发展趋势的看法,包括新材料、新技术、新应用等方面。
12. 结合您的研究方向或兴趣,提出一种具有创新性的功率器件设计方案。
三、面试评价标准1. 知识掌握程度:考察应聘者对功率器件设计基础知识的掌握程度。
电机,在设备领域是无处不在,这是一个不孤单的设备,靠谱的泵需要靠谱的电机,电机的好坏直接影响着设备能否正常运行。
电机类型、软启动方式,选型步骤,损坏原因方式处理方法,优劣电机区别.....这一个个问题都是电机幸福指数的重要反映。
下面就让我们一同看看。
一、各类电机的区别01、直流、交流电机区别直流电机结构示意图交流电机结构示意图顾名思义,直流电机使用直流电做为电源,而交流电机是使用交流电做为电源。
从结构上说,直流电机的原理相对简单,但结构复杂,不便于维护。
而交流电机原理复杂但结构相对简单,而且比直流电机便于维护。
在价格方面,功率相同的直流电机高于交流电机。
包括控制速度的调速装置,也是直流高于交流的价格,当然结构和维护也有很大的差异。
而在性能方面,因直流电机的速度稳定,转速控制精准,是交流电机无法达到的,所以在转速的严格要求下不得不采用直流电机替代交流电机。
交流电机调速相对复杂,但却由于化工厂使用交流电源而应用广泛。
02、同步、异步两类电机区别转子的旋转速度与定子一样,那就叫同步电动机。
如若不一致,则叫异步电动机。
03、普通、变频两类电机区别首先明确一点,普通电机并不能当变频电机来使用。
普通电机是按恒频恒压来设计的,不可能完全适应变频器调速的要求,因此不能当做变频电机使用。
变频器对电机的影响主要在电动机的效率和温升。
变频器在运行中能产生不同程度的谐波电压和电流,使电动机在非正弦电压、电流下运行,里面的高次谐波会引起电动机定子铜耗、转子铜耗、铁耗及附加损耗增加。
其中最为显著的是转子铜耗,这些损耗会使电动机额外发热,效率降低,输出功率减小,普通电动机温升一般要增加10%-20%。
变频器载波频率从几千赫到十几千赫,使得电动机定子绕组要承受很高的电压上升率,相当于对电动机施加陡度很大的冲击电压,使电动机的匝间绝缘承受较为严重的考验。
普通电动机采用变频器供电时,会使由电磁、机械、通风等因素所引起的震动和噪声变的更加复杂。
电气设计元器件如何选型等主回路器件,主要考虑的参数是电流,过载倍数。
电气控制柜元器件总空开大小的选择:①元器件总空开的额定电压≥线路的额定电压;②元器件总空开额定电流≥各个支路的计算负载电流;③元器件总空开的极限通断能力≥线路中最大的短路电流。
④线路末端单相对地短路电流≥1.25倍总空开瞬时(或短延时)脱扣整定电流。
⑤脱扣器的额定电流≥线路的计算电流。
⑥欠电压脱扣器的额定电压=线路的额定电压。
断路器作为上下级保护时,其动作应有选择性,上下级间应相互配合,并注意如下问题:1)断路器的上下级动作为选择性时,应注意电流脱扣器整定值与时间配合,通常上级断路器的过载长延时和短路短延时的整定电流,宜不小于下级断路器整定值的1.3倍,以保证上下级之间的动作选择性。
一般情况下第一级断路器(如变压器低压侧进线)宜选用过载长延时、短路短延时(0~0.5s延时可调)保护特性,不设短路瞬时脱扣器。
第二级断路器宜选用过载长延时、短路短延时、短路瞬时及接地故障保护等。
母联断路器宜设过载长延时、短路短延时保护。
第一级和第二级短路延时,应有一个级差时间,宜不小于0.2 s。
2)当上一级为选择型断路器,下一级为非选择型断路器时,上级断路器的短路短延时脱扣器整定电流,应不小于下级断路器短路瞬时脱扣器整定电流的1.3倍;上级断路器瞬时脱扣器整定电流,应大于下级断路器出线端单相短路电流的1.2倍。
3)当上下级都为非选择型断路器时,应加大上下级断路器的脱扣器整定电流值的级差。
上级断路器长延时脱扣器整定电流宜不小于下级断路器长延时脱扣器整定电流2倍;上级断路器的瞬时脱扣器整定电流应不小于下级断路器瞬时脱扣器整定电流的1.4倍。
4)当下级断路器出口端短路电流大于上级断路器的瞬时脱扣器整定电流时,下级断路器宜选用限流型断路器,以保证选择性的要求。
5)上下级断路器距离很近时,出线端预期短路电流差别很小时,则上级断路器宜选用带有短延时脱扣器,使之延时动作,以保证有选择配合。
0 引言随着各国出台新能源相关政策以及新能源产业的发展,该领域的相关产业的发展也带来了新机遇,电容器作为必不可少的上游相关产品行业也获得了新的发展 机遇。
在新能源及新能源汽车运用中,电容器在能源控制、电源管理、电源逆变以及直流交流变换等系统中是决定变流器寿命的关键元器件。
变流技术在上述系统中 普遍得到运用,然而在逆变器中直流电作为输入电源,需通过直流母线与逆变器连接,该方式叫作DC-Link或直流支撑。
因逆变器在从DC-Link得到有 效值和峰值很高的脉冲电流的同时,会在DC-Link上产生很高的脉冲电压使得逆变器难以承受。
所以需要选择DC-Link电容器来连接,一方面以吸收逆 变器从DC-Link端的高脉冲电流,防止在DC-Link的阻抗上产生高脉冲电压,使逆变器端的电压波动处在可接受范围内;另一方面也防止逆变器受到 DC-Link端的电压过冲和瞬时过电压的影响。
为新能源(含风力发电和光伏发电)以及新能源汽车电机驱动系统中DC-Link电容器的运用示意图图1、2.图1为风力发电变流器电路拓扑图,其中C1为DC-Link(一般整合到模块上),C2为IGBT吸收,C3为LC滤波(网侧),C4转子侧 DV/DT滤波。
图2为光伏发电变流器电路拓扑图,其中C1为DC滤波,C2为EMI滤波,C4为DC-Link,C6为LC滤波(网侧),C3为DC滤 波,C5为IPM/IGBT吸收。
图3为新能源汽车系统中主电机驱动系统,其中C3为DCLink,C4为IGBT吸收电容。
在上述提到的新能源领域运用中,DCLink电容作为一个关键器件,不管是在风力发电系统、光伏发电系统还是在新能源汽车系统中都要求高可靠性及长寿命,其选型显得尤为重要。
下面介绍薄膜电容与电解电容的特性对比及在DC-Link电容运用中两者的分析对比:1.特性对比1.1 薄膜电容首先介绍薄膜金属化的原理,薄膜金属化技术的原理:在薄膜介质表面蒸镀上足够薄的金属层,在介质存在缺陷的情况下,该镀层能够蒸发并因此隔离该缺陷 点起到保护作用,这种现象被称作自愈。
马达驱动产品选型HR4985-内置转换器和过流保护的微特步进电机驱动芯片描述HR4985是一种便于使用的内部集成了译码器的微特步进电机驱动器。
其设计为能使双极步进电机以全、半、1/4和1/8步进模式工作。
步进模式由逻辑输入MSx 选择。
输出驱动能力达到38V 和±1A。
HR4985包含一个工作在慢衰或混合衰减模式的固定关闭时间的电流调节器。
译码器是HR4985易于实施的关键。
通过STEP简单的输入一个脉冲就可以使电机完成一次步进,省去了相序表,高频控制线及复杂的编程接口。
这使其更适于在没有复杂的微处理器或微处理器负担过重的场合。
在步进操作期间,HR4985的内部电路可以自动的控制其PWM操作工作在快、慢及混合衰减模式。
在混合衰减模式下,器件初始经过一段时间的快衰减后,将切换至慢衰减模式直至固定关闭时间结束。
混合衰减模式控制不但降低了电机工作时产生的噪声,还增加了步进的准确性,同时减小了系统的功耗。
内部的同步整流控制电路改善了PWM操作时的功耗。
内部保护电路包括:带迟滞额过热保护、欠压锁定及过流保护。
不需要特别的上电时序。
HR4985提供一种带有裸露焊盘的QFN-24封装,还有一种是带裸焊盘的TSSOP24,能有效改善散热性能,且是无铅产品,引脚框采用100%无锡电镀。
型号选择特点●低导通电阻R DS(ON)●自动检测并选择电流衰减模式●支持慢衰减和混合衰减模式●降低功耗的同步整流功能●内部欠压锁定●过流保护●兼容3.3V和5V逻辑电平●过热关断电路●对地短路保护●负载短路保护●低电流睡眠模式,<10uA封装形式QFN24TSSOP24应用原理图描述HR4995是一种便于使用的内部集成了译码器的微特步进电机驱动器。
其设计为能使双极步进电机以全、半、1/4和1/16步进模式工作。
步进模式由逻辑输入MSx 选择。
输出驱动能力达到38V 和±1A。
HR4995包含一个工作在慢衰或混合衰减模式的固定关闭时间的电流调节器。
基于51单片机的PWM直流电机调速系统一、本文概述随着现代工业技术的飞速发展,直流电机调速系统在众多领域如工业自动化、智能家居、航空航天等得到了广泛应用。
在众多调速方案中,基于脉冲宽度调制(PWM)的调速方式以其高效、稳定、易于实现等优点脱颖而出。
本文旨在探讨基于51单片机的PWM直流电机调速系统的设计与实现,以期为相关领域的技术人员提供一种可靠且实用的电机调速方案。
本文将简要介绍PWM调速的基本原理及其在直流电机控制中的应用。
随后,将详细介绍基于51单片机的PWM直流电机调速系统的硬件设计,包括电机选型、驱动电路设计、单片机选型及外围电路设计等。
在软件设计部分,本文将阐述PWM信号的生成方法、电机转速的检测与控制算法的实现。
还将对系统的性能进行测试与分析,以验证其调速效果及稳定性。
本文将总结基于51单片机的PWM直流电机调速系统的优点与不足,并提出改进建议。
希望通过本文的阐述,能为相关领域的研究与应用提供有益参考。
二、51单片机基础知识51单片机,也被称为8051微控制器,是Intel公司在1980年代初推出的一种8位CISC(复杂指令集计算机)单片机。
尽管Intel公司已经停止生产这种芯片,但由于其架构的通用性和广泛的应用,许多其他公司如Atmel、STC等仍然在生产与8051兼容的单片机。
51单片机的核心部分包括一个8位的CPU,以及4KB的ROM、低128B 的RAM和高位的SFR(特殊功能寄存器)等。
它还包括两个16位的定时/计数器,四个8位的I/O端口,一个全双工的串行通信口,以及一个中断系统。
这些功能使得51单片机在多种嵌入式系统中得到了广泛的应用。
在PWM(脉冲宽度调制)直流电机调速系统中,51单片机的主要作用是生成PWM信号以控制电机的速度。
这通常是通过定时/计数器来实现的。
定时/计数器可以设置一定的时间间隔,然后在这个时间间隔内,CPU可以控制I/O端口产生高电平或低电平,从而形成PWM信号。
AC Motor Drive
Table of Contents
AC INPUT, Diode Bridges (2)
AC INPUT, Power Factor Correction (3)
AC INPUT, X/Y Capacitors (4)
BIAS SUPPLY (off-line, flyback), Discretes (5)
BIAS SUPPLY (off-line, flyback), Feedback (6)
BIAS SUPPLY (off-line, flyback), Power Semiconductors (7)
CONTROL AND GATE DRIVE, Capacitors (8)
CONTROL AND GATE DRIVE, Communications (9)
CONTROL AND GATE DRIVE, Discretes (10)
CONTROL AND GATE DRIVE, ESD Protection (11)
CONTROL AND GATE DRIVE, Gate Drive (12)
CONTROL AND GATE DRIVE, Isolation (13)
INVERTER (DC/AC) OUTPUT, Discretes (14)
INVERTER (DC/AC) OUTPUT, Modules (15)
INVERTER (DC/AC) OUTPUT, Power Semiconductors for 3- # Driver Bridge (16)
VISHAY components used for Motor Drives can include:
• Power MOSFETS
• High-Power Modules
• Diodes and Rectifiers
• Capacitors
• Resistors
• Thermistors
• Visible LEDs
• Optical Isolators
• Inductors / EMI Filters
• Shunt Resistors
• ESD Protection Devices
• LDOs
• Communications Interface ICs
Application Overview
A motor can be a simple induction machine that rotates with the connection of a simple AC voltage. In applications
that require more precise control of speed, torque, or positioning, it is more common to use a 3-phase motor. In order to control this type of motor, signals must be generated that cause the motor to spin properly, using feedback to close the loop and regulate the desired parameters.
AC Motor Drive : AC INPUT, Diode Bridges Single Phase
Three Phase
AC Motor Drive : AC INPUT, Power Factor Correction Bulk Capacitor
Inductor
PFC fast diode
PFC MOSFET
PFC pre-charge diode
Shunt resistor
AC Motor Drive : AC INPUT, X/Y Capacitors Film RFI caps
Inductor
Multilayer Ceramic Chip Capacitors
Shunt resistor
Tantalum Capacitors
Transformer
TVS and ESD protection
AC Motor Drive : BIAS SUPPLY (off-line, flyback), Power Semiconductors Flyback Diode
Flyback Switch
AC Motor Drive : CONTROL AND GATE DRIVE, Capacitors Multilayer Ceramic Chip Capacitors
Tantalum Capacitors
AC Motor Drive : CONTROL AND GATE DRIVE, Communications Communication Bus Interface IC
AC Motor Drive : CONTROL AND GATE DRIVE, Discretes Feedback Resistors
LED indicators
Linear Reg for Encoder Power
Switching diode
Zener clamp diodes
AC Motor Drive : CONTROL AND GATE DRIVE, ESD Protection ESD Protection Diodes
Ceramic HF Decoupling Capacitors
De-Saturation diodes
Electrolytic caps
Film caps
Shunt resistor
Temp Sensor
Ultrafast Bootstrap diodes
High Power Module
AC Motor Drive : INVERTER (DC/AC) OUTPUT, Power Semiconductors for 3- # Driver Bridge Braking or Inverter Switch
High Power Module
Recirculating Diodes。