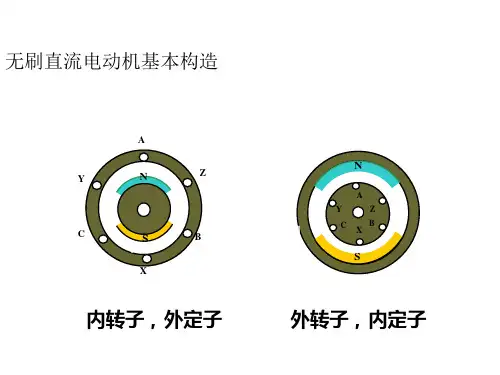
电动自行车用200W永磁无刷直流电机选型及结构参数设计2011.10.31
- 格式:doc
- 大小:1.07 MB
- 文档页数:8

2016届毕业生毕业设计说明书题目: 电动自行车无刷直流电机控制器设计院系名称:电气工程学院专业班级:自动F1205 学生姓名:余现飞学号: 2指导教师:王秀霞教师职称:讲师2016 年5月21 日摘要近年来社会经济快速发展的同时我们生活的环境也在遭受严重破坏。
随着民众的环境保护意识和资源节约意识不断提高,开发应用一种清洁、节能的新型交通工具已成为社会迫切的需要。
电动自行车的出现有效的解决了这一难题,极大满足了人们的需要,已经成为人们日常短距离出行常用的交通工具。
本文围绕无刷直流电机控制技术方面的问题,主要了解对转子位置检测、PWM 脉宽调制和电机控制策略等重要方面的问题,设计一个以PIC16F72单片机为控制核心的的无刷直流控制器,能够实现对电机基本的控制功能。
设计采用PIC16F72单片机作为控制系统的控制单元,采用IR2130驱动芯片为晶体管桥式电路提供驱动信号,实现对电机运行状态的有效控制。
该系统通过利用反电动势过零点法获取的转子位置信号输入到控制芯片,然后对输入的信号进行数据处理而后输入到驱动芯片来改变驱动电路中MOSFET管的导通顺序,进而实现对无刷直流电机的转速和正反转的控制。
通过欠压和过电流保护电路的设计实现对控制芯片和驱动芯片的保护,使系统能够可靠稳定的运行。
关键词:无刷直流电机;控制系统;IR2130;PIC16F72Title Design of Brushless DC Motor Controller for Electric BicycleAbstractIn recent years, the rapid development of social economy at the same time our living environment has also suffered serious damage. With the people's awareness of environmental protection and resource conservation, the development and application of a new type of clean and energy saving vehicle has become an urgent need of the society. The emergence of electric bicycles effectively solve this problem, greatly meet the needs of people, has become a common means of transportation for people's daily short distance travel.This paper focuses on the technical aspects of the brushless DC motor control, mainly to understand the important aspects of the rotor position detection, pulse width modulation (PWM) and motor control strategy, design a PIC16F72 MCU as the control core of the brushless DC controller to realization of electric machine the basic control function. PIC16F72 microcontroller is used as the control unit of the control system, and the IR2130 driver chip is used to provide the driving signal for the transistor bridge circuit to realize the effective control of the motor running state. The system by using the back EMF zero method to obtain the rotor position signal input to the control chip, and the input signal of data processing which is then input to the driver chip to change the driving circuit of MOSFET conduction sequence and then realize to turn Hayawa Masa inversion of control of Brushless DC motor. Through the design of under voltage and over current protection circuit, the protection of the control chip and the drive chip can be realized, so that the system can run reliably and stably.Keywords:Bushless DC motor;Control system;IR2130;PIC16F72目次1绪论 01.1无刷直流电机的发展概况和趋势 01.2课题研究的目的和意义 01.3设计的要求与内容 02硬件器件的选择 (2)2.1整体硬件结构图 (2)2.2 电机本机的选择 (3)2.3主控芯片的选择 (3)2.4驱动芯片的选择 (4)2.5转子位置检测方法的选择 (5)3硬件电路设计 (6)3.1电源电路模块 (6)3.2驱动电路模块 (6)3.3电流检测模块 (7)3.4转子位置检测电路模块 (8)3.5欠压检测电路模块 (9)3.6速度控制电路模块 (9)3.7刹车电路模块 (10)3.8单片机最小系统 (11)4 软件设计 (12)4.1主程序 (12)4.2定子绕组换相子程序 (13)结论 (14)致谢 (15)参考文献 (16)附录 (17)1绪论1.1无刷直流电机的发展概况和趋势19世纪40年代有刷直流电动机诞生,在相当长的一个阶段内凭借它优秀的线性机械特性、调速范围宽、较大的启动转矩等特点在诞生以来在电动车驱动装置中占据着主导地位,但普通的直流电动机存在换向时电刷和换向器的强迫性接触造成电机运行不稳定,可靠性差,经常需要定期维护和保养,而且电刷和换向器接触时会产生火花和噪音等缺点大大限制了其应用范围。


电动自行车中使用的直流电机概述电动自行车的发展离不开其所采用的核心驱动元件——电机的发展,其实电机本身的发展自有其规律,但把电机与自行车结合起来研究将是一件十分有意义的事情。
引言电动自行车的发展离不开其所采用的核心驱动元件——电机的发展,其实电机本身的发展自有其规律,但把电机与自行车结合起来研究将是一件十分有意义的事情。
本文简述目前国内市场上电动自行车中所采用的各种直流电机的基本概况,指出其产品类型、结构、性能特点、使用场合等。
分类2.1 按电机类型分类电动自行车所用直流电机按电机本身类型可分成以下几类。
2.1.1 普通永磁直流电动机这类电机即为通常使用的永磁直流电动机。
电机定子为铁氧体或钕铁硼永磁磁钢磁极,转子为普通直流电机转子,电机转速2000~4000r/min。
这类电机需配备减速齿轮箱后才能用于电动自行车上。
2.1.2 普通无刷直流电机将有刷直流电机改为无刷直流电机,所不同的是定子为多相散嵌绕组,而转子为永磁磁极。
这类电机转速设计的较低,一般不需减速机构,电机转速500~1000r/min。
电机装于自行车的中轴上(习惯称中置电机)。
由于采用无刷电机,因此这类电机通过驱动线路控制很容易实现调速。
2.1.3 印制绕组、线绕盘式直流电机采用这两种电机的主要目的是利用这类电机薄饼式结构特点,使电机整体便于在自行车上合理安放。
这类电机转速较高,3000~4000r/min,电机功率较大。
本类电机需要与减速齿轮机构相配才能用于电动自行车上。
线绕盘式直流电机由于其绕组参数便于调整,因此设计上可使电机特性有较大的变化,能适应多种负载特性要求。
2.1.4 外转子无刷直流电机这类电机轴向尺寸短,而铁心外径较大,因此结构上为扁平式,其电机结构和工作原理与普通无刷电机相类似,但该电机为外转子(定子磁钢)式无刷直流电机,电机极数较多,转速较低,在200r/min左右,无需减速齿轮,结构简单,安装在自行车后轮轴上。
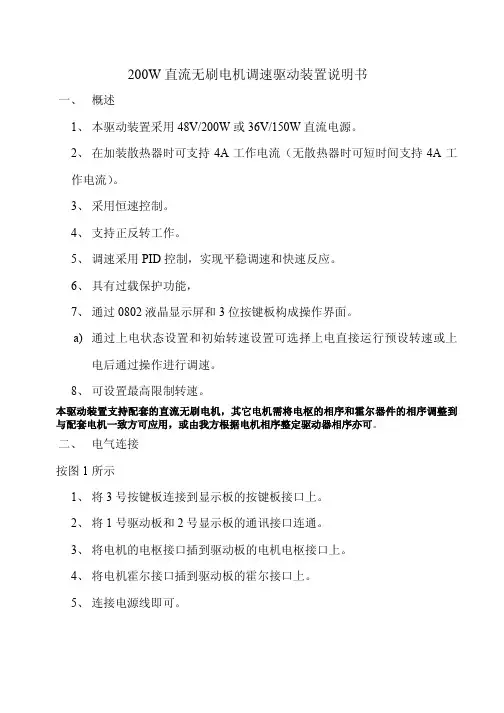
200W直流无刷电机调速驱动装置说明书一、概述1、本驱动装置采用48V/200W或36V/150W直流电源。
2、在加装散热器时可支持4A工作电流(无散热器时可短时间支持4A工作电流)。
3、采用恒速控制。
4、支持正反转工作。
5、调速采用PID控制,实现平稳调速和快速反应。
6、具有过载保护功能,7、通过0802液晶显示屏和3位按键板构成操作界面。
a)通过上电状态设置和初始转速设置可选择上电直接运行预设转速或上电后通过操作进行调速。
8、可设置最高限制转速。
本驱动装置支持配套的直流无刷电机,其它电机需将电枢的相序和霍尔器件的相序调整到与配套电机一致方可应用,或由我方根据电机相序整定驱动器相序亦可。
二、电气连接按图1所示1、将3号按键板连接到显示板的按键板接口上。
2、将1号驱动板和2号显示板的通讯接口连通。
3、将电机的电枢接口插到驱动板的电机电枢接口上。
4、将电机霍尔接口插到驱动板的霍尔接口上。
5、连接电源线即可。
三、操作指南1、上电状态设置按住减速键(-)再上电,液晶屏第一行显示“POWER ST”表示上电状态,第二行显示“ON”或者“OFF”表示上电直接按预设转速运行的功能开启还是关闭(出厂默认是“OFF”,以后则显示上一次设定的状态),“ON”表示开启,“OFF”表示关闭,可以按加速键(+)对两种状态进行切换以供选择,选定后按开关键(M)确认。
如果选择的是“OFF”则装置被设置为预设转速关闭状态,转速给定值为默认的20转每分钟,并且电机的启动需要按开关键(M),启动后可按加速键或减速键修改给定转速(给定值于液晶屏第二行显示)装置将自动根据给定值调整电机转速(电机的实际转速值于液晶屏的第一行显示)。
如果选择的是“ON”则装置被设置为预设转速开启状态,此时液晶屏第一行显示“RunSpeed”(运行速度),第二行显示上次设定的预设转速(出厂默认为“0000”),可按加速键或减速键进行修改,按一下加减“10”长按则可连续加减。

直流无刷电机电动自行车控制器的硬件设计摘要:电控系统是电动自行车的核心部件,其控制器的性能是决定电动自行车稳定可靠运行的重要因素。
本文主要对于直流无刷电机电动自行车控制器的硬件设计相关技术进行分析,对于今后电动车控制系统设计具有一定帮助。
关键词:直流无刷电机控制器,电源转换,硬件设计,电路设计电动自行车控制器的硬件部分分成以下部分[1,2]:电源部分是利用控制器的电源VSS经过电压转换产生+5V和+15V,分别供给单片机及其外围部分和IOR2103功率驱动部分,VSS提供MOSFET管的电源输入;欠压检测部分把VSS通过电阻分压送入单片机与设定电压比较来判断电源是否欠压;换相电路通过74HC08与非门产生跟电机相位序列一致的控制序列,经过霍尔传感器利用反电势原理的位置信号,把该信号的状态与电机的固定序列进行比较判断换相的正确性;MOSFET驱动电路由IOR2103把上管和下管控制信号进行放大,从而来驱动大功率管。
1 芯片选型设计硬件前有许多准备工作需要做,他们是硬件设计的基础主要有芯片选型芯片选型。
在电动自行车无刷电机控制器这样一个应用场合来说,根据对控制器的要求有多种数据处理芯片可供选择。
若控制方法复杂、运算量较大,精度性能要求较高,可以选用OSP高性能芯片船1。
若运算量较小,速度要求不特别高,主要运算为逻辑运算,而且输出I/O口较多,则应用单片机设计较好。
单片机的好处是自带I/O接口、PWM模块、捕捉/比较功能、外中断、内部定时器甚至通讯、自编程等功能方便实现用户功能的同时大大减少外围电路、降低成本和可靠性。
目前市场上单片机种类型号非常多,多家公司在生产,各有所长。
这其中,MICROCHIP公司的PIC系列单片机型号尤其丰富,内部功能模块配置多样、齐全,12位、14位、16位及32位(按指令长短区分)一应俱全,以适应市场细分化的趋势而取得销售份额的增长。
所以,此次研究的控制器,采用PIC单片机。


电动自行车用160W永磁无刷直流电机选型及结构参数设计1.综述无刷直流电机既具备交流电机的结构简单、运行可靠、维护方便等一系列优点,又具备直流电机的效率高、无励磁损耗以及调速性能好等诸多特点,非常适合在电动自行车上应用。
电动自行车用160W驱动电机采用的无刷直流电机具有以下优点:⑴结构简单,维护方便。
⑵采用电子换相,工作可靠,电子换相器寿命长。
⑶由于不采用电刷,因此不存在电刷带来的噪音、火花及无线电干扰等问题。
⑷能够方便地实现充油均压密封,作为水下电机使用体积小,重量轻。
⑸绕组位于定子上,转子上为磁钢,定转子仅通过气隙相互联系,易于实现电机的集成设计。
每极每相绕组不是整数的绕组称为分数槽绕组。
电动自行车电机采用分数槽绕组后可具备以下优点:⑴对于多极的无刷直流电机可采用较少的定子槽数,有利于槽满率的提高,进而提高电机性能;电机采用相对较多的极数,可减小转子铁心的磁通量,即可减小转子铁心厚度。
⑵增加绕组的短距和分布效应,改善反电动势的正弦性;⑶每个绕组只绕在一个齿上,缩短了线圈周长和绕组端部伸出长度,减少了用铜材的消耗;⑷从工艺上来看,较少的元件数量可简化嵌线工艺和接线,降低成本,同时线圈间没有重叠,不必相间绝缘;⑸效率上:线圈周长和绕组端部伸出长度较短,电机内阻小,电机铜损少,进而提高了电机效率并降低了温升;⑹降低了齿槽转矩,有利于减少振动和噪声。
2.联合仿真及操作步骤(2011-10-18)ANSOFT公司开发的电磁场数值计算方法的有限分析软件——Maxwell,可提供了一种方便快捷且准确的仿真环境,准确分析电机内部电磁场的分布情况,能自动计算电机的自感、互感、磁链、转矩等参数。
同时,ANSOFT公司还提供另一款电路仿真软件――SIMPLORER,可以搭建BLDC电机驱动系统的瞬态模型,将电磁场仿真与电路、控制系统仿真结合起来,能够有效且真实地对BLDC驱动系统进行仿真研究,为本设计提供相应的理论依据和数据支持。

无刷直流永磁电动机设计实例一.主要技术指标1. 额定功率:W 30P N =2. 额定电压:,直流V U N 48=3. 额定电流:AI N 1<3. 额定转速: min /10000r n N =4. 工作状态:短期运行5. 设计方式:按方波设计6. 外形尺寸:m065.0036.0⨯φ二.主要尺寸的确定1. 预取效率、63.0='η2. 计算功率 i P '直流电动机 ,按陈世坤书。
W P K P NNm i 48.4063.03085.0'=⨯==η长期运行 Ni P P ⨯''+='ηη321短期运行 N i P P ⨯''+='ηη4313. 预取线负荷m A A s /11000'=4. 预取气隙磁感应强度 T B 55.0'=δ5. 预取计算极弧系数8.0=i α6. 预取长径比(L/D )λ′=27.计算电枢内径m n B A P D N s i i i 23311037.110000255.0110008.048.401.61.6-⨯=⨯⨯⨯⨯⨯=''''='λαδ根据计算电枢内径取电枢内径值 m D i 21104.1-⨯=8. 气隙长度m 3107.0-⨯=δ9. 电枢外径m D 211095.2-⨯=10. 极对数p=111. 计算电枢铁芯长 mD L i 221108.2104.12--⨯=⨯⨯='='λ根据计算电枢铁芯长取电枢铁芯长L= m2108.2-⨯12. 极距 mp D i 221102.22104.114.32--⨯=⨯⨯==πτ13. 输入永磁体轴向长mL L m 2108.2-⨯==三.定子结构1.齿数 Z=62.齿距 mz D t i 22110733.06104.114.3--⨯=⨯⨯==π3.槽形选择梯形口扇形槽,见下图。
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!伺服技术"#$%&’($)*+,-.$电动自行车用永磁无刷直流电机电磁转矩控制收稿日期/0112314305邱建琪6史涔7陈永校8浙江大学6杭州29110:;摘要/分析比较了三相六状态无刷直流电机各种<=>调制方式的优缺点6并利用无刷直流电机的数学模型6分析了不同调制方式下相电流和电磁转矩的计算公式7仿真结果表明6相同占空比下6采用单斩<=>调制方式对产生电磁转矩有利7关键词/无刷直流电动机?<=>?转矩中图分类号/@>2A9文献标识码/B文章编号/91193A5C58011C;1C3112:312(D E,F G H I E F J E K G L MN NK O E P K FQ D E$H E J Q R K S T U F E Q V J(K R W I E K G L N X Y Z)N[\]^_‘a3b_6c d\e f a3g f_6e d h i j k a l3m_‘k8n o f p_‘a l]a_q f r s_t u6n o f p_‘a ld‘a l v o k w29110:6e o_a‘;x y P Q R T J Q/@o fz o‘r‘z t f r_s t_zk{|_{{f r f a t<=>}k|f s{k r~r w s o!f s s"e}k t k r_sz k}#‘r f|$@o f{k r}w!‘sk{t o f #o‘s f z w r r f a t‘a|f!f z t r k}‘a l a f t_z t k r b w f‘r f‘a‘!u v f|~‘s f|k a}‘t o f}‘t_z}k|f!k{t o f%&"e>$@o f s_}w!‘t_k a r f s w!t s_a|_z‘t ft o‘t s_a l!f3z o k#<=>}f t o k|_s}k r ff{{f z t_q ft o‘at o f|k w~!f3z o k#<=>}f t o k|{k rt o f #r k|w z t_k ak{t o f f!f z t r k}‘l a f t_z t k r b w f$’E()K R O P/%r w s o!f s s"e>k t k r s?<=>?@k r b w f*引言在许多对调速精度要求不高的应用场合6无刷直流电机8%&"e>;的调速方式主要通过开环<=>调制来实现7这种方法直接在三相位置信号产生的901+导通逻辑信号上叠加<=>信号6通过外部给定<=>的占空比来实现转速变化6硬件实现容易6成本较低,0-7目前市场上电动自行车的调速大多采用这种方式7由于<=>调制方式的不同7在同样的负载条件下6即使给定相同的占空比6稳态时电机的转速仍有很大不同7产生这种情况的原因是因为不同的<=>调制方式对%&"e>的相电流波形以及电磁转矩有很大影响7文中对%&"e>常用的几种<=>方式的优缺点进行了比较6并利用无刷直流电机的数学模型6详细分析了<=>调制方式对%&"e>电磁转矩的影响7.三相六状态%&"e>常用调制方式永磁无刷直流电动机的控制方法常采用三相六状态901+导通方式6如图98‘;所示7根据每个导通状态<=>作用管子数目的不同6把<=>调制方式分成两大类型6一类是/双斩0方式6如图98~;所示7每个导通状态控制器上下桥臂的功率管全部进行<=>调制?另一类是/单斩0方式6即在三相六状态任意一个状态区间6只有上桥臂或下桥臂的一个功率管进行<=>斩波控制7/单斩0方式又可以分成两大类6一类是个导通状态始终只对上桥臂或者下桥臂的功率管进行<=>调制7图98z;所示为单斩下桥臂功率管的导通方式7另一类是A个功率管轮换进行<=>调制7每个导通状态对应一个功率管斩波7图98|;所示为单斩<=>3k a方式7每个功率管的901+导通区间中6前A1+进行<=>调制6后A1+恒通7双斩方式功率管的开关损耗是单斩方式的两倍6降低了控制器的效率6并且不利于散热7单斩方式中只斩上桥臂或只斩下桥臂6实现比较方便8把<=>信号和上桥臂或下桥臂功率管的触发信号相与即可;6但是会造成上下功率管的开关损耗不同6而A个功率管轮换的单斩方式其开关损耗比双斩方式减小一半6且每个功率管的开关损耗相同6减小了功率开关应力6提高了系统的可靠性7因此实际系统中采用A管轮换的单斩方式进行<=>斩波控制较为有利71:21电动自行车用永磁无刷直流电机电磁转矩控制邱建琪史涔陈永校62 222222222222222222222222222222222222222222222222222222222222222222等万方数据图!三相六状态控制常用"#$调制方式图%单斩和双斩两种"#$调制方式下续流状态分析单斩和双斩两种调制方式下&’()*$绕组电流的续流情况是不同的+以三相六状态的,-!导通区间为例&当"#$信号为./01有效时&两类"#$调制方式没有区别&绕组电流的导通路径如图%234所示+5相绕组接母线电压正端&’相绕组接负端+当"#$信号为./661无效时&对于双斩调制&绕组电流的续流回路如图%274所示+续流电流经母线电压闭合+对于单斩调制&功率管8,断开时的续流回路如图%294所示&这种情况对应于只斩下桥臂的单斩调制方式+功率管8!断开时的续流回路如图%2:4所示+其对应;<=->?单斩调制方式+两种单斩方式下的续流情况是相同的&续流电流都是通过绕组直接闭合&分析时可以归为一类+正是由于续流情况的不同&在相同的"#$占空比下&两种调制方式下产生的相电流及电磁转矩是不同的+@两种调制方式下相电流和电磁转矩矩的分析三相六状态无刷直流电动机的电路拓扑结构如图A 所示+仍旧以!-,导通区间为例&根据图A 可以写出该区间内’()*$的电压平衡方程BCD A C 微电机%E E F 年第A G 卷第F 期2总第!A H 期II I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I 4万方数据!"#$%&#’()&#)*’+#’!,,-.!"/$%&/’()&/)*’+/’!012,,-345图6无刷直流电动机的电路拓扑结构图式中7!"#$389.4:;5!)<7为9相绕组对直流母线中点=-3参考地5之间的端电压789为功率管>4的?@A 斩波控制开关函数B 当89$4表示>4开通79相绕组接到母线电压正端789$-表示>4关断79相绕组经续流二极管接母线电压负端B !"/$38C.4:;5!)<为C 相绕组对直流母线中点之间的端电压78C 为功率管>D 的?@A 斩波控制开关函数B 根据?@A 调制方式的不同789和8C 可以相同也可以不同B !,,-为电机三相绕组中点与直流母线中点之间的电压B %为绕组相电阻7(为绕组相电感7+#E +/为绕组的相反电动势B 假定永磁无刷直流电机的相反电动势为具有4;-F 平顶宽度的理想梯形波7其幅值为G 7则在4.D 导通区间内有+#$G 7+/$.G 7另外由于只有两相绕组导通7恒有&#$.&/B 对于双斩调制方式7>4与>D 的斩波控制开关函数是相同的7即有89$8C $43对应?@A H I ,J 57或者89$8C $-3对应?@A H I K K J 5B 此时9相绕组的电流方程可表示为L%&#’()&#)*$!)<;.G 89$8C$4%&#’()&#)*$.!)<;.G 89$8C 012$-3;5对于单斩调制方式7以单斩M N O .P Q 方式为例B 在4.D 导通区间7功率管>D 恒通7即8C$47而>4进行?@A 调制7有89$4或者89$-B 此时9相绕组的电流方程可表示为L%&#’()&#)*$!)<;.G 89$4%&#’()&#)*$.G 89012$-365比较公式3;5和365可得L 在?@A 斩波信号有效时7绕组的电流方程是相同的7说明两种方式下绕组电流以相同的电流变化率上升B 在?@A 斩波信号无效时7对于双斩方式7绕组电流以3.!)<:;.G 5:(的电流变化率衰减7而对于单斩方式7绕组电流以.G :(的电流变化率衰减B 很明显7单斩方式下绕组电流衰减要小于双斩方式7而两种方式下电流的上升率是相同的B 因此在给定相同的?@A 占空比下3对应相同的平均母线电压57单斩方式下绕组电流的稳态值要大于双斩方式下绕组电流的稳态值B 而一个状态内C R S T A 的平均电磁转矩可表示为LU V O $;G W #XY O3Z 5式中7Y O 为电机的机械角速度7W #X $4U[U-&\3*5)*为一个导通状态绕组电流的稳态平均值B 由于单斩方式绕组电流的稳态平均值要大于双斩方式7因此给定相同的占空比下7单斩方式下输出的平均电磁转矩要大于双斩方式B]仿真结果为了分析不同?@A 调制方式对C R S T A 电磁转矩的影响7采用开环?@A 斩波控制7即把一个固定载波频率7固定占空比的?@A 信号按照图43/5和图43)5所示两种方法叠加到由三相位置信号生成图Z 两种调制方式下电磁转矩和三相电流仿真波形^_6^电动自行车用永磁无刷直流电机电磁转矩控制邱建琪史涔陈永校7‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘等万方数据的换相逻辑信号上!研究其对绕组电流及其产生的电磁转矩的影响"仿真所用的#$%&’的具体参数为(极对数)*+,!相电感-*./012!相电阻3*4/,5,6!额定转速+047819:!额定功率,4;<"仿真软件采用=>=$&?"图@为额定转速下两种调制方式产生的三相电流和电磁转矩的仿真波形"图中电磁转矩波形的数据为缩小+4倍后的数值"=<’信号的载波频率为,;A B !占空比为4/C "由图可知!采用单斩D E 1F G :方式产生的相电流和电磁转矩远大于双斩方式!与理论分析一致"H 结论对于三相六状态+,4I导通方式控制的永磁无刷直流电动机!采用速度开环=<’斩波调速时!不同=<’的调制方式对#$%&’的相电流和电磁转矩有很大影响"采用J 管轮换的单斩调制方式!不但开关损耗降低为双斩调制时的一半!而且在相同的=<’占空比下能产生更大的电磁转矩"参考文献(K +L 叶金虎等/无刷直流电动机K ’L/北京(机械工业出版社!+C C 4/K ,L 张琛/直流无刷电动机原理及应用K ’L /北京(机械工业出版社!+C C M /作者简介(邱建琪N +C M @FO !男!博士研究生!研究方向为微特电机及其控制PPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPPP "N 上接第@C 页O 进电动机!+C C @专利期满以后!推出了新的三相混合式步进电动机系列!采用定子J 极!转子仍为04齿的结构"配套电流型带微步功能的驱动器!每转步数为,44Q @44Q +444Q ,444和,444Q @444Q +4444Q,444!可以看出它兼有通常二相和五相电动机的分辨率!还可以在此基础上提高到+4倍"可以看出!这是一个相当不错的设计方案"它充分运用了电流波形控制技术!让统一的三相电动机系列!可以同时适合原有二相和五相电动机的应用场合"在传统电机中采用通用的三相功率器件成本会低一些!是三相方案的优势之一"R 展望步进电动机应用于开环高分辨率的定位系统!有它独特之处!在很多应用系统中得到体现!至今还没有发现更合适取代它的产品!特别是在一些功率相当小的系统中!今后将继续发展"功率或机座号相对较大的步进电动机!在工业控制系统中的应用目前正受到交流伺服电动机的威胁!有被取代的趋势"这主要因为步进电动机存在一些弱点!如存在明显的振荡区Q 带惯量和过载能力小Q 快速性不足和效率低等"闭环控制认为是克服这些弱点的主要方向!这方面的研究也没有停止过!但至今没有取得大的突破!没有获得广泛的应用"今后的研究还会继续下去!应与属于#$%&’的交流伺服电动机系统会合!具体来说可能借鉴交流伺服系统的控制技术!但保留了部分步进电动机的特点!形成一种新的S 步进伺服电动机T 或S 伺服步进电动机T "参考文献(K +L U V W X 7’!A X 9:X /A Y Z 79[\]X D D 9:^1G ]G 7\,0Y X _7\G W [X ‘X a G D 1X :]K U L /=7G b G W c ’&>%,0]2d ::V _a>Y 1D G \9V 1!+C C J (.4M e.+J K ,L 王宗培!孙宝奎!程智!任雷/论步进电动机产品的格局K UL /电工技术学报/+C C C N @O (0eC K .L 王宗培!任雷/混合式步进电动机转矩指标的研究K UL /电工技术杂志/,444!,.N +,O !+e,作者简介(王宗培N +C .+FO !男!教授!主要从事步进电动机和无刷交流伺服电动机研究ffffffffffffffffffffffffffffffffffffffffffffffffff"正在编辑,440年版g 中国微电机制造业厂商名录h 免费收录企业信息欢迎刊登企业广告电话(4,C i5@,M J J 5,传真(4,C i5@,.@M M .中国电器工业协会微电机分会i4@i 微电机,44@年第.M 卷第@期N 总第+.C 期j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j j O万方数据。
如不慎侵犯了你的权益,请联系我们告知!永磁直流微电动机控制技术Permanent magnet DC micro-motorcontrol technology专业:测控技术与仪器姓名:拓明方指导教师:申请学位级别:学士论文提交日期: 2015年月日学位授予单位:天津科技大学如不慎侵犯了你的权益,请联系我们告知!摘要传统直流电机中电刷和换向器的存在使得其结构变得复杂,而且换相时发生的械接触严重影响了电机运行的可靠性和稳定性,而且会缩短其使用寿命,极大的影响了电机的应用范围。
因此,长期以来科学家们都着力于研究能有效替代电刷和换向器的装置或控制方法。
伴随着微处理器技术和智能控制技术的发展以及永磁材料的出现,PMBDCM 正在以其优越的性能逐步取代传统电机应用于各个领域。
其中无位置传感器的PMBDCM更是克服了位置传感器安装复杂、成本较高的缺陷,拥有可靠的工作性能和简单的电机结构等优势。
因此,针对无位置传感器的PMBDCM,本次毕业设计详细介绍PMBDCM的结构和工作原理,以TMS320F2812芯片为核心设计了 PMBDCM的无位置传感器控制系统的硬件电路,给出了模块化的软件设计思路;并选择硬件起动法和“反电动势”过零检测法来控制电机运行。
最后在MATLAB/SIMULINK环境下,采用模块化设计思路对无位置传感器的PMBDCM进行建模;并采用经典的双闭环控制方法对电机模型进行仿真,通过仿真结果证明了“反电动势”过零检测法的可行性。
关键词:PMBDCM;无位置传感器; TMS320F2812;“反电势”过零检测如不慎侵犯了你的权益,请联系我们告知!ABSTRACTTraditional DC motor has a complicated structure because of brush and commutator existence, and mechanical contact occurs when the commutation of a serious impact on the reliability and stability of the motor operation, as well as, it will shorten motor’s life, a great impact on the application range of the motor. scientists have long been focused on the study can effectively replace devices or control method brushes and commutator.With the development of microprocessor technology and intelligent control technology and permanent magnet material advent, PMBDCM is its superior performance to gradually replace Traditional motor used in various fields. Which PMBDCM position sensor-less is overcome complex and costly defects in position sensor mounted, possess reliable performance, simple motor structure and other advantages.Therefore, for the position sensor-less PMBDCM, this graduation design details of the structure and working principle on PMBDCM ,use TMS320F2812 chip as the core designed sensor-less control system hardware circuit and a modular software design ideas for PMBDCM, then, select hardware starting method and the "back-EMF" zero-crossing detection method to control the motor running.Finally, under the MATLAB / SIMULINK environment, build a position sensor-less PMBDCM model by modular design concept; and simulate motor model adopt the classic double-loop control method, the simulation results proved feasibility of the "back-EMF " zero-crossing detection method.Keywords: PMBDCM; Position sensor-less control; TMS320F2812;"back-EMF " zero-crossing detection如不慎侵犯了你的权益,请联系我们告知!目录1 绪论 (1)1.1永磁无刷直流电动机控制技术的研究概况 (1)1.2永磁无刷直流电动机的发展趋势 (2)1.3永磁无刷直流电动机的特点及应用 (3)1.3.1 在航空航天中的应用 (3)1.3.2 在汽车中的应用 (3)1.3.3 在家用电器中的应用 (4)1.3.4 在精密电子设备和器械中的应用 (4)1.4论文需要做的工作 (5)2 永磁无刷直流电动机的结构和原理 (6)2.1永磁无刷直流电动机的结构 (6)2.1.1 电动机本体 (7)2.1.2 位置传感器 (7)2.1.3 逆变器(电子开关线路) (8)2.2永磁无刷直流电动机的基本工作原理 (9)2.2.1 有刷直流电动机的工作原理 (9)2.2.2.无刷直流电动机工作原理 (10)2.3无刷和有刷直流电机的比较 (12)3 永磁无刷直流电动机的控制系统设计 (13)3.1控制系统的硬件设计 (13)3.1.1 驱动电路及驱动保护模块 (14)3.1.2 PIC16F877A 芯片及控制系统原理图 (15)3.2控制系统的软件设计 (17)3.2.1 软件设计 (17)3.2.2 处理位置传感器的检测信号 (18)3.3本章小结 (18)如不慎侵犯了你的权益,请联系我们告知!4 永磁无刷直流电动机的无位置传感器控制技术 (19)4.1无位置传感器PMBDCM的控制系统硬件设计 (19)4.1.1 控制系统框图 (19)4.1.2 逆变器电路的设计 (20)4.1.3 逆变器驱动电路设计 (20)4.1.4 核心控制电路及外围电路 (21)4.2转子位置的检测及无位置传感器时电机的起动 (23)4.2.1 反电势过零检测法原理和实现 (23)4.2.2 无位置传感器PMBDCM的硬件起动 (25)4.3无位置传感器PMBDCM的控制系统软件设计 (26)4.3.1 转子零初始位置起动程序 (26)4.3.2 “反电势”法运行程序 (28)4.3.3 功率模块保护中断(PDPINT)服务程序 (29)4.4本章小结 (29)5 永磁无刷直流电动机无位置传感器控制系统的仿真 (31)5.1PMBDCM的数学模型 (31)5.2无位置传感器PMBDCM的建模和仿真 (32)5.2.1 总体结构设计 (32)5.2.2 双闭环调速系仿真结果 (33)6 总结与展望 (36)参考文献 (37)致谢 (38)如不慎侵犯了你的权益,请联系我们告知!1 绪论永磁无刷直流电动机 ( 以下简称 PMBDCM ) 是近年来随着信息技术和材料技术的发展而迅速发展起来的一种性能优秀的新型电动机。
电动车无刷永磁电机技术参数及安装图0.2~1.5KW 电机基本数据:全套价(电机+驱动器+调速踏板)功率电池电压转速额定转矩峰值转矩峰值功率电流峰值电流效率重量1 kw 24~48V1500转/分6.4Nm 13Nm 2.5KW 45.76A86A 92.6%15kg1.5 24~48V 2500转/分5.7Nm 12Nm 3KW 68.86A130A 92.8%16kg1 kw 36~60V3500转/分2.7Nm 6Nm 2.5KW 30.8A70A 92.6%17kg1.5 36~60V 3500转/分4.1Nm 10Nm 5KW 57.2A110A 92.8%15kg2 36~60V 3500转/分5.5Nm 12Nm 5KW 46.2A100A 92.8%16kg(1)系统包括:无刷直流电机+驱动器+调速踏板,配备完整,整体调试试验,性能优异,方便使用。
(2)电机为无刷结构,不产生火花.不需要更换炭刷,防护等级:IP44,水、泥、土不会进入电机内部,结构紧凑、过载能力强,使用寿命长。
(3)负载特性优异,低速性能好,启动转矩大,启动电流小、适应电动车频繁起动的需要,节省电能。
电机在整个速度范围内电机均高效运行,比有刷直流电机、交流变频电机(只在额定点附近效率高)相比有质的提高。
(4)电机配备优质专用驱动器,采用高性能进口功率模块和高档进口控制芯片,采用工业级元器近,使用环境温度-20度,军工级要求可达-40度,性能可靠。
驱动器具有无级调速、正反转控制运行、反转速度减半(可调),制动能量回馈,多种过载过热保护、过压保护、欠压保护,速度信号、电压、电流量输出。
(5)配备高档调速踏板,踏板为无触点变压器结构,比接触式踏板或霍儿式踏板可靠性有质的提高,保证车辆平稳可靠运行。
(6)脉冲式用电,符合电池放电特性,不需要电池瞬间输出大电流,防止电池瞬间亏电。
与有刷直流电机或交流变频电机相比,一次充电可多跑30%~50%的里程,可提高电池使用寿命50%。
两相直流永磁无刷电机两相直流永磁无刷电机是一种现代化的电动机,它具有高效率、低噪音和长寿命等优点,被广泛应用于工业生产和民用领域。
下面我将向大家介绍一下这种电机的工作原理和应用。
我们来了解一下两相直流永磁无刷电机的结构。
它主要由转子、定子和电子换向器组成。
转子上安装有永磁体,定子上则安装有线圈。
当电流通过定子线圈时,会产生磁场,这个磁场与转子上的永磁体相互作用,从而产生电磁力。
通过电子换向器的控制,可以改变定子线圈的电流方向,从而实现电机的正常工作。
两相直流永磁无刷电机的工作原理可以简单地描述为:当电机通电后,电子换向器会根据转子的位置和速度信息,对定子线圈中的电流进行调整,从而使得转子始终处于合适的位置。
这种精确的调整可以使电机转子在不断旋转的过程中,保持稳定的转速和转矩输出。
这种电机在实际应用中有着广泛的用途。
首先,由于其高效率和低噪音的特点,它被广泛应用于家用电器领域,如洗衣机、空调和电风扇等。
其次,在工业生产中,两相直流永磁无刷电机也被广泛应用于机器人、自动化设备和传动系统中,以提高生产效率和质量稳定性。
由于两相直流永磁无刷电机的特点,它还被广泛应用于新能源领域。
在电动汽车和混合动力车中,这种电机可以提供高效的动力输出,并且具有较长的使用寿命。
在可再生能源领域,如风力发电和太阳能发电中,两相直流永磁无刷电机也被用作发电机,将机械能转化为电能。
两相直流永磁无刷电机作为一种高效、低噪音和长寿命的电动机,具有广泛的应用前景。
它不仅在家电、工业生产和新能源领域得到了应用,还在其他领域中发挥着重要作用。
随着科技的不断发展和创新,相信这种电机将会在未来发展得更加广泛和成熟。
电动自行车用200W永磁无刷直流电机选型及结构参数设计2011.10.31电动自行车用永磁无刷直流电机选型及结构参数设计1.油泥模型电机参数分析油泥模型的电机设计为38齿牙盘,其转子内径为111mm,电机铁心长度为14mm。
其参数见表1。
表1 方案1电机参数表当给电机加上48V电压时,其输出特性如图1所示,此时电机最高效率的工作点较高,为650 r/min,而电动自行车额定工作转速仅为180 r/min。
所以理论上应增加匝数或降低电压,直接增加匝数受到了槽满率的限制,降低线径再增加匝数又受到了定子电流密度的限制。
所以实际工作时只能通过降低电压来。
降低定子电流。
当电压降低到18V使得定子电流为9.5A时,其输出功率仅为120W,效率为70%,不能满足要求。
图1 油泥模型电机输出特性2.电机初始方案选择电机槽数和极数有多种匹配参数可以选用,设计组利用计算机软件对槽数和极数分别为36/24、36/40、42/46的电机进行了参数仿真,并对结果进行了分析。
结论表明,极数为24的电机极数太少,导致磁钢较宽(17mm),加工困难。
另外,由于24极数的电机额定工作速度太高,其低速时效率较低,因此不适合采用。
2.1推荐方案定子、转子参数的确定推荐方案的定子槽、转子极数分别为36/40,定子绕组为0.69漆包线3股33匝,如表2所示。
表2推荐方案电机参数表本方案最高效率转速440r/min,最高效率87%,电机输出特性如图3所示。
图为铁心长20mm的输出特性。
由图中可以看出,相比较铁芯25mm电机结构,最高效率时的转速370 r/min提升到到450 r/min,电机从30 r/min~460 r/min都可以输出200W以上的功率。
图3推荐方案电机输出特性电机定子采用双层绕组,电机齿槽匹配和部分嵌线图如图4和图5所示。
图4 电机齿槽匹配图图5 电机嵌线图三相磁链曲线如图6所示。
Maxwell2DDesign120.00图6 三相磁链曲线图7 电机剖分网格建立好电机四分之一有限元模型后,把电机分为五部分进行网格剖分。
电动自行车用永磁无刷直流电机选型及结构参数设计
1.油泥模型电机参数分析
油泥模型的电机设计为38齿牙盘,其转子内径为111mm,电机铁心长度为14mm。
其参数见表1。
表1 方案1电机参数表
当给电机加上48V电压时,其输出特性如图1所示,此时电机最高效率的工作点较高,为650 r/min,而电动自行车额定工作转速仅为180 r/min。
所以理论上应增加匝数或降低电压,直接增加匝数受到了槽满率的限制,降低线径再增加匝数又受到了定子电流密度的限制。
所以实际工作时只能通过降低电压来。
降低定子电流。
当电压降低到18V使得定子电流为9.5A时,其输出功率仅为120W,效率为70%,不能满足要求。
图1 油泥模型电机输出特性
2.电机初始方案选择
电机槽数和极数有多种匹配参数可以选用,设计组利用计算机软件对槽数和极数分别为
36/24、36/40、42/46的电机进行了参数仿真,并对结果进行了分析。
结论表明,极数为24的电机极数太少,导致磁钢较宽(17mm),加工困难。
另外,由于24极数的电机额定工作速度太高,其低速时效率较低,因此不适合采用。
2.1推荐方案定子、转子参数的确定
推荐方案的定子槽、转子极数分别为36/40,定子绕组为0.69漆包线3股33匝,如表2所示。
表2推荐方案电机参数表
本方案最高效率转速440r/min,最高效率87%,电机输出特性如图3所示。
图为铁心长20mm的输出特性。
由图中可以看出,相比较铁芯25mm电机结构,最高效率时的转速370 r/min提升到到450 r/min,电机从30 r/min~460 r/min都可以输出200W以上的功率。
图3推荐方案电机输出特性
电机定子采用双层绕组,电机齿槽匹配和部分嵌线图如图4和图5所示。
图4 电机齿槽匹配图
图5 电机嵌线图
三相磁链曲线如图6所示。
0.00 5.00
10.0015.0020.00
Time [ms]
-0.03
-0.02
-0.01
0.00
0.010.02
0.03
Y 1 [W b ]
Ansoft LLC
Maxwell2DDesign1
XY Plot 3
Curve Info
FluxLinkage(P haseA)Setup1 : Transient
FluxLinkage(P haseB)Setup1 : Transient
FluxLinkage(P haseC)Setup1 : Transient
图6 三相磁链曲线 图7 电机剖分网格
建立好电机四分之一有限元模型后,把电机分为五部分进行网格剖分。
电枢绕组网格的最大步长为2.3mm ,磁钢网格的最大步长为1mm ,主体网格的最大步长1.5mm ,磁钢网格的最大步长0.068mm ,气隙网格的最大步长为0.075mm 。
剖分的网格如图7所示
进行分析后,其磁力线如图8所示。
(a)0s时(b)0.02s时
图8 磁力线分布图
电机的局部磁密分布图如图9所示。
由图中可以看出,电机定子、转子最大磁密未超过1.7T,即定子和转子未出现磁饱和现象。
(a)0s时(b)0.02s时
图9 局部磁密分布图
(a)0s时(b)0.02s时
图10局部磁密分布矢量图
2.2推荐方案参数调整分析
由于推荐方案的最高效率时的转速为440 r/min,为了进一步降低最高效率的转速,可以采取三种措施:
①在保证槽满率不是太高的情况下,增加绕组匝数并减小绕组线径。
绕组匝数为58匝时电机输出特性如图11所示,电机最高效率时的转速为200 r/min,
可是此时的输出功率不足100W,不能满足设计要求。
因此,本方案不适合采用。
图11增加匝数时电机输出特性
②增加定子铁芯轴向长度
定子铁芯长为25mm时的电机输出特性如图12所示。
对比图3可以看出,本方案最高效率使得转速降低到370 r/min,而且限流为9A时的功率也可以增加至180W。
因此,在安装空间不受限制的情况下,应尽可能增加电机轴向长度。
图12 铁心长为25mm的输出特性
③增加极数和槽数的调整
定子槽、转子极数分别为42/46电机参数见表3。
本方案采用0.69漆包线3股33匝,磁钢宽为9mm,定子齿宽3.5mm,磁密1.85T,最
高效率87%,转速为360r/min,性能和推荐方案相似。
输出特性如图13所示。
图13 方案5电机输出特性
在有限的定子外径上选择电机槽数时,应考虑定子结构强度和加工工艺。
太多的槽数会导致定子齿太窄而难以加工,强度也难以达到要求。
本方案相对于推荐方案来说齿数槽数较多,加工制造工艺复杂,成本高。
3低速时效率参数和功率参数的校核
上述仿真时是假设电机两端直接加在48V电源上的,此时电枢电流过大引起定子的铁耗和铜耗增加,电机在250 r/min以下时效率低于80%。
电动自行车电机实际工作时应配合带有限流电路的控制器使用,以实现低速时的过载保护和恒转矩输出。
下面根据设计要求的效率参数和功率参数对上述方案进行改进。
4.1推荐方案的校核
若输入24V电压,180 r/min时输出175W功率,效率为78%。
此时为3股φ0.69的漆包线并绕,定子电流密度约为8.2A/mm2,若增加匝数减小线径则会出现电流密度过大,减少匝数会导致最高效率的转速太高,低速时电流过大,转矩过小。
4.2推荐方案定子铁芯加长为25mm时的校核
由定子铁芯加长后的输出特性可知,在电机两端加48V直流电,电机输出功率约为200W 时,转速为370 r/min,此时减小电动自行车调速开关即可降低电机转速。
当电机PWM控制器控制输入电压的有效值为32V时,电机可在180 r/min时输出280W功率,此时电机效率为75%,达不到设计要求。
降低电压有效值至30V时,可以在180 r/min时输出230W功率,此时效率依然为75%。
继续降低电压至29V时,在180 r/min时仅能输出170W功率,此时效率依然为77%,由于功率和效率都太小达不到设计要求。
为了提高电机在180 r/min时效率,可以通过适当增加匝数降低电机最高效率时的转速来进行,当绕组线圈由φ0.69×31匝提升至φ0.69×35匝时,绕组槽满率由55%提升至62%。
当输入32V电压时,180 r/min时输出160W功率,效率为78%。
此时若通过提高输入电压来提高功率,则电机效率降低;若降低电压来提升电机效率,则功率降低。
继续升高匝数又有槽满率约束也是如此。
因为定子铁芯加长后的最优设计方案为:绕组线圈为φ0.71×31匝,绕组槽满率为58%。
若输入28V电压,180 r/min时输出190W功率,效率为79%。
4基于SIMPLORER的联合仿真模型的建立
采用仿真软件MAXWELL(有限元电磁场仿真软件)与SIMPLORER(电路仿真软件)
可共同构建BLDC电机控制系统的FEA(电磁场有限元仿真)模型,并通过SIMPLORER
与MAXWELL的联机仿真,来获得所设计电机的仿真结果。
联机仿真模型如图14所示。
PMSM Drive with Current Hysteresis Ban
w
F
图17电机在180 r/min时输出转矩(-0.5°)
在较低转速,例如100 r/min时,电机输出转矩如图18所示(初始角0.5),转矩仍约为8Nm左右。
图18电机在100r/min时输出转矩
5结论
通过对各方案电机设计参数的比较可知:
推荐方案设计的40极36槽分数槽绕组BLDC电机最高本体效率为87%,最高系统效率可达80%左右,在180r/min时可输出8Nm转矩,功率为150W。
因此,主要考虑成本时推荐推荐方案为首选方案。
若果能进一步增加定子铁芯的轴向长度至25mm,则:
推荐方案设计的40极36槽分数槽绕组BLDC电机最高本体效率为88%,最高系统效率可达83%左右,在180r/min时可输出9Nm转矩,功率为188W,可以达到设计要求。
因此,主要考虑成本时推荐推荐方案为首选方案。