无刷直流电动机控制系统设计
- 格式:doc
- 大小:1.04 MB
- 文档页数:53
无刷直流电动机及驱动系统设计无刷直流电动机是一种能够将电能转化为机械能的电机,它不仅具有高效率、高功率密度、大扭矩和高转速等优点,同时还能在宽范围内调整转速和控制扭矩。
因此,无刷直流电动机及其驱动系统设计成为了工业应用和个人消费电子产品中常见的一种电机类型。
无刷直流电动机驱动系统由电机本体、功率器件、传感器、微控制器和控制算法等组成。
首先,电机本体是电机的核心部分,包括转子、定子、磁铁和绕组等。
转子是电机的运动部分,由永磁体和轴承支撑。
定子是电机的静止部分,由铁芯和绕组组成。
磁铁是电机的永磁体,产生磁场以与永磁体上的磁场相互作用。
绕组是由导线绕制的线圈,通过流过电流产生磁场。
其次,功率器件是驱动系统的关键部分,用于将电能从电源转化为机械能。
一般采用MOSFET或IGBT等功率器件,以实现高速开关和较高电流能力。
它们能够承受高电压和大电流,并快速切换,使得电机能够根据控制信号调整转速和扭矩。
传感器是驱动系统中用于检测电机位置和转速的重要组成部分。
常见的传感器有霍尔传感器、反电动势传感器和编码器等。
霍尔传感器通过检测磁场强度变化来确定转子的位置,反电动势传感器通过测量绕组中电流变化产生的反电动势来确定电机的转速,编码器则能够提供更准确的位置和速度信息。
微控制器是驱动系统中负责控制电机运行的核心部件。
它包含了控制算法、控制逻辑和通信接口等功能,通过与传感器和功率器件进行交互来实现对电机转速、扭矩和方向的精确控制。
微控制器能够根据输入的控制信号,通过调节电流和电压来控制电机的运行状态。
最后,控制算法是驱动系统的重要组成部分,在实际应用中起到至关重要的作用。
常见的控制算法包括PID控制、电流环控制、速度环控制和位置环控制等。
PID控制通过调整比例、积分和微分控制器的系数来达到稳定控制的效果。
电流环控制通过直接或间接测量电机电流,以控制电机的转矩和速度。
速度环控制通过测量电机转速,并根据所需转速和实际转速之间的差异来调整控制信号。

For personal use only in study and research; not for commercial use直流无刷电动机工作原理与控制方法序言由于直流无刷电动机既具有交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具备直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多优点,故在当今国民经济各领域应用日益普及。
一个多世纪以来,电动机作为机电能量转换装置,其应用范围已遍及国民经济的各个领域以及人们的日常生活中。
其主要类型有同步电动机、异步电动机和直流电动机三种。
由于传统的直流电动机均采用电刷以机械方法进行换向,因而存在相对的机械摩擦,由此带来了噪声、火化、无线电干扰以及寿命短等弱点,再加上制造成本高及维修困难等缺点,从而大大限制了它的应用范围,致使目前工农业生产上大多数均采用三相异步电动机。
针对上述传统直流电动机的弊病,早在上世纪30年代就有人开始研制以电子换向代替电刷机械换向的直流无刷电动机。
经过了几十年的努力,直至上世纪60年代初终于实现了这一愿望。
上世纪70年代以来,随着电力电子工业的飞速发展,许多高性能半导体功率器件,如GTR、MOSFET、IGBT、IPM等相继出现,以及高性能永磁材料的问世,均为直流无刷电动机的广泛应用奠定了坚实的基础。
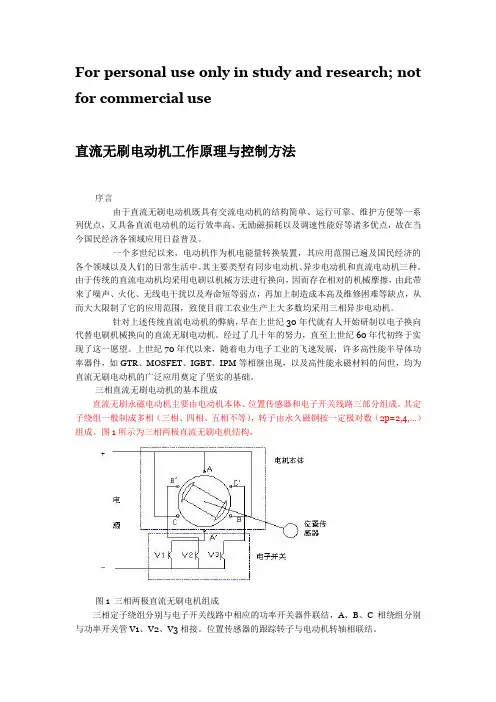
三相直流无刷电动机的基本组成直流无刷永磁电动机主要由电动机本体、位置传感器和电子开关线路三部分组成。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。
图1所示为三相两极直流无刷电机结构,图1 三相两极直流无刷电机组成三相定子绕组分别与电子开关线路中相应的功率开关器件联结,A、B、C相绕组分别与功率开关管V1、V2、V3相接。
位置传感器的跟踪转子与电动机转轴相联结。
当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各项绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
基于单片机的无刷直流电动机控制系统研究的文献综述2000字左右研究无刷直流电动机控制系统是电气工程领域的一个重要课题,它涉及到控制理论、电机原理、嵌入式系统等多个学科领域。
以下是一个关于基于单片机的无刷直流电动机控制系统研究的文献综述,大约2000字左右:________________________________________文献综述:基于单片机的无刷直流电动机控制系统研究1. 引言无刷直流电动机(BLDC)以其高效率、低噪音和长寿命等优点在工业和家用电器中得到了广泛应用。
而基于单片机的无刷直流电动机控制系统,作为一种先进的电机控制技术,具有成本低、响应快、可靠性高等特点,受到了研究者们的广泛关注。
2. 无刷直流电动机的工作原理无刷直流电动机是一种将电能转换为机械能的装置,其工作原理基于电磁感应和电流的相互作用。
通过在电动机中的定子和转子上安装恰当的磁铁,配合适当的控制电路,可以实现对电机转速和转矩的精确控制。
3. 基于单片机的无刷直流电动机控制系统设计基于单片机的无刷直流电动机控制系统一般由三部分组成:传感器模块、控制算法和功率放大模块。
传感器模块用于获取电机的运行状态,包括转速、位置等信息;控制算法根据传感器获取的信息计算出适当的电机控制信号;功率放大模块将控制信号放大驱动电机。
4. 常用的控制算法常用的无刷直流电动机控制算法包括电枢电流控制、感应电动机模型控制、空间矢量调制控制等。
这些控制算法在实际应用中各有优缺点,研究者们通常根据具体的应用场景选择合适的算法。
5. 实验与应用基于单片机的无刷直流电动机控制系统已经在工业自动化、电动汽车、无人机等领域得到了广泛应用。
研究者们通过实验验证了该控制系统的稳定性、精度和可靠性,并不断改进和优化控制算法,以适应不同的应用需求。
6. 结论与展望基于单片机的无刷直流电动机控制系统是电机控制领域的一个重要研究方向,其在提高电机性能、降低能耗、推动电动化技术发展等方面具有重要意义。
基于PWM技术的无刷直流电机的调速系统设计Brushless DC Motor Speed Control System Based On PWM摘要无刷直流电机(BLDCM)具有调速性能优异、运行性能可靠和维护方便等优点,相较于有刷直流电机,其采用电子换向取代机械换向,有效地提高了电动机的运行效率,也使得其成品体积更加的轻巧。
但是无刷直流电机也存在转矩脉动、控制器复杂、成本较高等缺陷,这些缺陷的存在也一定程度上影响了无刷直流电机作为高效、先进电机在应用上的普及,因此研究如何改善以及解决无刷直流电机存在的问题便具有更加明显的现实意义。
MATLAB是一款用于数据分析与计算、算法开发以及动态系统建立与仿真的数学软件。
最初是由美国MathWorks公司出品的商用数学软件,其由Matlab和Simulink 两个重要组成部分构成,现在更是应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
本文通过对无刷直流电机结构以及工作原理的研究与分析,找出导致其具有较大转矩脉动的原因,并先从理论上得到如何抑制转矩脉动的方法,再通过Matlab 建立起无刷直流电机的仿真模型,对其仿真结果进行分析与改善,从而有效地抑制无刷直流电机的转矩脉动。
关键词:无刷直流电机,转矩脉动,仿真模型AbstractBrushless DC motor (BLDCM) has excellent speed performance, reliable performance and easy maintenance, etc., compared to a brush DC motor, which uses electronically commutated replace mechanical commutation, effectively improve the operating efficiency of the motor, but also so that the volume of the finished product more compact. But there brushless DC motor torque ripple controller complexity, high cost and other defects, the presence of these defects also affected to some extent, a brushless DC motor as efficient and advanced motor universal in application, how to improve and therefore research solve the problems of the brushless DC motor will have more obvious practical significance.MATLAB is a tool for data analysis and computation, algorithm development, and simulation of dynamic systems to establish and mathematical software. MathWorks was originally developed by the US company produced commercial mathematical software, which consists of Matlab and Simulink are two important parts, and now it is used in engineering calculations, control design, signal processing and communications, image processing, signal detection, financial modeling design and analysis and other fields.Based on the brushless DC motor structure and working principle of research and analysis to identify the cause of which has a large torque ripple, and theoretically first get how to suppress torque ripples, established through Matlab brushless Simulation Model DC motor, its simulation results are analyzed and improved in order to effectively suppress the torque ripple of the brushless DC motorKeywords:Brushless DC motor; The torque pulsation; The simulation model目录第一章绪论 (6)1.1 研究背景及研究意义 (6)1.2 无刷直流电机调速系统的国内外研究现状 (7)1.3 本文的主要研究内容及章节安排 (8)第二章无刷直流电机的基本原理 (9)2.1 无刷直流电机的基本结构 (9)2.1.1 电机本体 (9)1.电动机定子 (9)2. 电动机转子 (10)2.1.2 位置传感器 (10)2.2 无刷直流电机的工作原理及换相过程 (12)2.2.1 无刷直流电机的工作原理 (13)2.2.2 无刷直流电机的换相过程 (15)2.3 无刷直流电机的应用 (16)2.4 本章小结 (16)第三章基于PWM技术的无刷直流电机转矩脉动抑制 (17)3.1 PWM控制技术简介 (17)3.1.1 PWM控制技术的基本原理 (17)3.1.2 PWM控制技术的控制方法 (18)3.2 Buck变换器的原理及控制方式 (19)3.2.1 Buck变换器的原理 (19)3.2.2 Buck变换器的控制方式 (20)3.3 无刷直流电机转矩脉动的产生 (20)3.3.1传导区转矩脉动 (21)3.3.2换相区转矩脉动 (22)3.4 无刷直流电机转矩脉动的抑制 (24)3.5 本章小结 (27)第四章无刷直流电机的仿真分析 (28)4.1 MATLAB和SIMULINK的介绍 (28)4.2 无刷直流电机的数学模型 (29)4.2.1电机本体模块 (30)4.2.2转矩计算模块 (31)4.2.3速度控制模块 (32)4.2.4电流控制模块 (32)4.2.5电压逆变模块 (33)4.3无刷直流电机的仿真结果 (33)4.4本章小结 (38)结论 (39)致谢 (40)参考文献 (41)附录 (42)第一章绪论1.1 研究背景及研究意义对于工厂生产和社会发展而言,电力拖动都有着举足轻重的地位,为了满足生产工艺的需求,通过控制电机的转矩以及转速来控制电动机的转速以及位置,这样就可以形成一个自动化系统,称之为电力拖动。
设计内容与设计要求一.设计内容:1. 介绍无刷直流电动机(BLDCM)的工作原理、调速系统的组成及功能。
2. 分析功率控制器的主电路拓扑形式。
3. 给出三相无刷直流电动机控制系统的框图。
4. 电流调节器的设计。
二、设计要求:1、思路清晰,给出整体设计和电路图。
2、给出具体设计思路和电路。
3、写出设计报告。
主要设计条件1.提供被控电机;2.提供设计要求;3.提供调试用实验室;说明书格式1.课程设计封面;2.任务书;3.说明书目录;4.正文5.总结与体会;6. 参考文献7. 课程设计成绩评分表进度安排1: 课题内容介绍和查找资料;2: 总体电路设计和分电路设计;3: 写设计报告,打印相关图纸;4: 答辩;参考文献1、《电机控制》2、《电力电子技术》3、《特种电机及其控制》4、《电机的DSP控制技术及其应用》5、《电机拖动与控制》6、《特种交流电机及其计算机控制与仿真》3目录简介 (6)第一章直流无刷电机的工作原理 (7)1.基本工作原理 (7)2.无刷直流电动机的组成 (10)第二章无刷直流电机的控制 (11)1.无刷直流电机的控制原理 (11)2.转子的控制 (13)3.速度的控制 (14)第三章电机的反馈 (15)1.电流测量 (15)2. RPM转速测量 (15)第四章硬件设计 (16)1. LPC2141的使用方法 (16)小结 (17)电气与信息工程系课程设计评分表 (18)简介直流无刷电机:又称“无换向器电机交一直一交系统”或“直交系统”。
是将交流电源整流后变成直流,再由逆变器转换成频率可调的交流电,但是,注意此处逆变器是工作在直流斩波方式。
无刷直流电动机Brushless Direct Current Motor ,BLDC,采用方波自控式永磁同步电机,以霍尔传感器取代碳刷换向器,以钕铁硼作为转子的永磁材料;产品性能超越传统直流电机的所有优点,同时又解决了直流电机碳刷滑环的缺点,数字式控制,是当今最理想的调速电机。
无刷直流电机控制系统的仿真与分析一、本文概述随着科技的不断进步和电机技术的快速发展,无刷直流电机(Brushless Direct Current, BLDC)因其高效、低噪音、长寿命等优点,已广泛应用于电动汽车、无人机、家用电器等众多领域。
然而,无刷直流电机的控制系统设计复杂,涉及电子技术、控制理论、电机学等多个学科领域,因此,对其进行深入研究和仿真分析具有重要意义。
本文旨在探讨无刷直流电机控制系统的基本原理、仿真方法以及性能分析。
将简要介绍无刷直流电机的基本结构和控制原理,包括其电机本体、电子换向器、功率电子电路等关键部分。
将详细介绍无刷直流电机控制系统的仿真建模过程,包括电机模型的建立、控制算法的设计以及仿真环境的搭建。
通过对仿真结果的分析,评估无刷直流电机控制系统的性能,包括动态响应、稳态精度、效率等指标,并提出优化建议。
本文的研究不仅有助于深入理解无刷直流电机控制系统的运行机制和性能特点,还可为实际工程应用提供理论支持和指导。
通过仿真分析,可以预测和优化无刷直流电机控制系统的性能,提高系统的稳定性和可靠性,推动无刷直流电机在更多领域的应用和发展。
二、无刷直流电机控制系统基本原理无刷直流电机(Brushless DC Motor, BLDCM)是一种采用电子换向器替代传统机械换向器的直流电机。
其控制系统主要由电机本体、电子换向器(也称为功率电子电路或逆变器)以及控制器三部分组成。
无刷直流电机控制系统的基本原理,就在于如何准确地控制逆变器的开关状态,从而改变电机内部的电流流向,实现电机的连续旋转。
控制器根据电机的运行状态和用户的输入指令,生成适当的控制信号。
这些控制信号是PWM(脉宽调制)信号,用于控制逆变器的开关状态。
逆变器一般由六个功率开关管(如MOSFET或IGBT)组成,分为三组,每组两个开关管串联,然后三组并联在直流电源上。
每组开关管分别对应电机的一个相(A、B、C),通过控制每组开关管的通断,可以改变电机每相的电流大小和方向。
无刷直流电机调速控制系统设计方案毕业论文目录摘要.................................. 错误!未定义书签。
Abstract .................................. 错误!未定义书签。
第1章绪论 .. (1)1.1 无刷直流电动机的发展概况 (1)1.2无刷直流永磁电动机与有刷直流永磁电动机的比较 (2)1.3 无刷直流电动机的结构及基本工作原理 (2)1.4 无刷直流电动机的运行特性 (6)1.4.1 机械特性 (6)1.4.2 调节特性 (7)1.5 无刷直流电动机的应用与研究动向 (8)第2章无刷直流电动机控制系统设计方案 (10)2.1系统设计要求 (10)2.2 无刷直流电动机系统的组成 (10)2.3系统设计方案论证 (12)2.3.1转速测量方案论证 (12)2.3.2电机驱动方案论证 (12)2.3.3键盘输入方案论证 (13)2.3.4显示方案论证 (13)2.3.5 PWM调速工作方式 (13)2.3.6 PWM软件实现方案论证 (14)2.3.7直流电动机转速检测方案论证 (14)2.4系统原理框图设计 (14)第3章系统硬件分析与设计 (16)3.1单片机的介绍 (16)3.2显示电路的设计 (20)3.2.1显示电路的分析 (20)3.2.2显示电路硬件原理 (21)3.3键盘电路的设计 (22)3.3.1键盘电路的分析 (22)3.3.2键盘电路硬件原理 (23)3.4逆变主电路设计 (24)3.4.1 功率开关主电路 (24)3.4.2逆变电路驱动设计 (25)3.5辨相电路模块 (26)3.6霍尔位置传感器模块 (27)第4章软件程序设计 (29)4.1系统初始化程序模块 (29)4.2键盘模块 (31)4.3 显示模块 (33)4.4 转速调节程序设计 (34)结束语 (36)参考文献 (37)致谢 (38)毕业设计(论文)知识产权声明 (39)毕业设计(论文)独创性声明 (39)附录A 无刷直流电机调速控制系统电路原理图 (41)附录B 程序清单 (41)附录C PCB电路版图 (55)附录D 外文翻译 (56)第1章绪论1.1无刷直流电动机的发展概况无刷直流电动机是在有刷直流电动机的基础上发展起来的,这一渊源关系从其名称中就可以看出来。
直流无刷电机控制实验系统设计与实现摘要:伴随着社会和科技的发展,在产业的制造与使用中,永磁材料、电力电子技术、传感器技术、现代控制理论以及微型计算机技术都取得了巨大的进展。
基于上述相关材料、技术的研发与集成,使得其在直流无刷电动机的应用技术更为完备与成熟,并具有高效率、长寿命、低噪声等优良的速度-转矩性能等优点。
在新时期、新情况下,直流无刷电动机以其众多的优势和特点,在工业、家电等行业得到了越来越多的应用,这就对电动机的控制提出了越来越高的要求。
本文在已有的科研成果的前提下,针对当前我国在直流无刷电机方面的研发现状,提出了直流无刷电机的发展方向。
关键词:直流无刷电机;发展;现状分析由于其具有高效率、低噪声、结构紧凑、可靠性高、维修费用低等优点,在各类新能源汽车和各类家用电子产品中得到了广泛应用。
本文所设计的 BLDCM控制试验系统是以EV汽车为原型,具有EV汽车的基础性能;并对电动式汽车控制系统中的每一个功能进行了分区、分区的划分,方便了详细的试验方案的实施;同时,本试验所使用的24V的电压,使整个试验系统的直流母线电流不超过2A,从而避免了因大功率而造成的安全隐患和设备的损坏。
在软件设计方面,对程序的流程图进行了细致的设计,将各种控制功能以不同的形式包装起来,方便了软硬件的协作调试。
该实验平台可以应用于课堂实验,可以应用于课程设计,可以进行创新实验。
一、直流无刷电机(一)直流无刷电机基本结构直流无刷电机是同步电机的一种,即电机转子的转速主要受电机定子旋转磁场的速度和周边相应转子极数的影响直流无刷电机是21世纪发展起来的一种新型的机电一体化装备,它的主要组成是由电机本体、传动机构等组成,尤其是在工业生产中,被越来越多的人所采用。
至于直流无刷电机,则是将新老两代直流电机的优势相结合,不仅保留了传统直流电机的优势,而且在具体的结构设计上,基本上去掉了碳刷和滑环,达到了无级调速,而且速度范围也相对较宽,这样的话,在使用过程中,其过载能力会得到极大的提高,而且可靠性、稳定性和适应性也会得到很好的改善,最主要的是,在维护和维护过程中,可以方便地进行操作和维护。
第三章无刷直流电动机PWM控制方案无刷直流电动机是目前应用广泛的电动机之一,其具有高效率、高功率密度和长寿命的特点。
PWM(Pulse Width Modulation)是一种常用的控制技术,可以实现对无刷直流电动机的精确控制。
本文将详细介绍PWM 控制方案在无刷直流电动机中的应用。
1.PWM控制原理PWM控制是通过调整开关器件的开通时间来控制电压的有效值,从而实现对无刷直流电动机的控制。
PWM控制的主要原理是将直流供电通过开关器件进行快速切换,使得电机得到一个等效的可调的直流电,从而实现对电动机的控制。
(1)基于单脉冲宽度调制(SPWM)的控制方案SPWM是一种常见的PWM调制技术,其基本思想是将待调制的模拟信号与一个高频的三角波进行对比,通过比较得到一个等效的PWM信号。
在无刷直流电动机中的应用,SPWM控制方案可以实现对电机的速度和转矩的控制。
(2)基于矢量控制的控制方案矢量控制是一种高级的PWM控制技术,可以实现对无刷直流电动机的精确控制。
它通过对电流矢量的调整来实现对电机的转速和转向的控制。
矢量控制具有较高的动态性能和响应速度,能够实现电机的高效运行。
(3)基于空间矢量调制(SVM)的控制方案SVM是一种高级的PWM调制技术,可以实现对无刷直流电动机的高精度控制。
它通过对电流矢量的调整来实现对电机的速度和转矩的控制。
SVM控制具有较高的输出电流质量,让电机运行更加稳定和高效。
3.PWM控制的优势(1)高效率:PWM控制可以实现对电机的高效率控制,可以根据需要调整输出电压和电流,从而使电机运行在最佳点。
(2)高精度:PWM控制可以实现对电机的精确控制,可以根据需要调整输出电压和电流的波形,从而实现对电机速度和转矩的精确控制。
(3)稳定性好:PWM控制可以减小电机的振动和噪声,从而使电机运行更加平稳和稳定。
4.PWM控制的应用(1)工业应用:PWM控制广泛应用于各类工业设备中,如机械加工、自动化生产线等,可以实现对电机的高精度控制,提高生产效率。
(此文档为word格式,下载后您可任意编辑修改!)无刷直流电动机控制系统设计方案第1章概述 (1)1.1 无刷直流电动机的发展概况 (1)1.2 无刷直流永磁电动机与有刷直流永磁电动机的比较 (2)1.3 无刷直流电动机的结构及基本工作原理 (3)1.4 无刷直流电动机的运行特性 (6)1.4.1 机械特性 (6)1.4.2 调节特性 (6)1.4.3 工作特性 (7)1.5 无刷直流电动机的应用与研究动向 (8)第2章无刷直流电动机控制系统设计方案 (10)2.1 无刷直流电动机系统的组成 (10)2.2 无刷直流电动机控制系统设计方案 (12)2.2.1 设计方案比较 (12)2.2.2 无刷直流电动机控制系统组成框图 (13)第3章无刷直流电动机硬件设计 (15)3.1 逆变主电路设计 (15)3.1.1 功率开关主电路图 (15)3.1.2 逆变开关元件选择和计算 (15)3.2 逆变开关管驱动电路设计 (17)3.2.1 IR2110功能介绍 (17)3.2.2 自举电路原理 (19)3.3 单片机的选择 (20)3.3.1 PIC单片机特点 (20)3.3.2 PIC16F72单片机管脚排列及功能定义 (22)3.3.3 PIC16F72单片机的功能特性 (22)3.3.4 PWM信号在PIC单片机中的处理 (23)3.3.5 时钟电路 (23)3.3.6 复位电路 (24)3.4 人机接口电路 (24)3.4.1 转把和刹车 (24)3.4.2 显示电路 (25)3.5 门阵列可编程器件GAL16V8 (27)3.5.1 GAL16V8图及引脚功能 (27)3.6 传感器选择 (28)3.7 周边保护电路 (30)3.7.1 电流采样及过电流保护 (30)3.7.2 LM358双运放大电路 (31)3.7.3 欠电压保护 (32)3.8 电源电路 (32)第4章无刷直流电动机软件设计 (33)4.1 直流无刷电机控制器程序的设计概况 (33)4.2 系统各部分功能在软件中的实现 (33)4.3 软件流程图 (34)结束语 (36)致谢 (37)参考文献 (38)附录1 (39)附录2 (51)第1章概述1.1 无刷直流电动机的发展概况无刷直流电动机是在有刷直流电动机的基础上发展起来的,这一渊源关系从其名称中就可以看出来。
有刷直流电动机从19世纪40年代出现以来,以其优良的转矩控制特性,在相当长的一段时间内一直在运动控制领域占据主导地位。
但是,有机械接触电刷-换向器一直是电流电机的一个致命弱点,它降低了系统的可靠性,限制了其在很多场合中的使用。
为了取代有刷直流电动机的机械换向装置,人们进行了长期的探索。
早在1917年,Bolgior就提出了用整流管代替有刷直流电动机的机械电刷,从而诞生了无刷直流电机的基本思想。
1955年美国的D.Harrison等首次申请了用晶体管换相线路代替有刷直流电动机的机械电刷的专利,标志着现代无刷直流电动机的诞生。
无刷直流电动机的发展在很大程度上取决于电力电子技术的进步,在无刷直流电动机发展的早期,由于当时大功率开关器件仅处于初级发展阶段,可靠性差,价格昂贵,加上永磁材料和驱动控制技术水平的制约,使得无刷直流电动机自发明以后的一个相当长的时间内,性能都不理想,只能停留在实验室阶段,无法推广使用,1970年以后,随着电力半导体工业的飞速发展,许多新型的全控型半导体功率器件(如GTR、MOSFET、IGBT等)相继问世,加之高磁能积永磁材料(如SmCo、NsFeB)陆续出现,这些均为无刷直流电动机广泛应用奠定了坚实的基础,无刷直流电动机系统因而得到了迅速的发展。
在1978年汉诺威贸易博览会上,前联邦德国的MANNESMANN公司正式推出了 MAC无刷直流电动机及其驱动器,引起了世界各国的关注,随即在国际上掀起了研制和生产无刷直流系统的热潮,这业标志着无刷直流电动机走向实用阶段。
随着人们对无刷直流电动机特性了解的日益深入,无刷直流电动机的理论也逐渐得到了完善。
1986年,H.R.Bolton对无刷直流电动机作了全面系统的总结,指出了无刷直流电动机的研究领域,成为无刷直流电动机的经典文献,标志着无刷直流电动机在理论上走向成熟。
我国对无刷直流电动机的研究起步较晚。
1987年,在北京举办的联邦德国金属加工设备展览会上,SIEMENS和BOSCH两公司展出了永磁自同步伺服系统和驱动器,引起了国内有关学者的广泛注意,自此国内掀起了研制开发和技术引进的热潮。
经过多年的努力,目前,国内已有无刷直流电动机的系列产品,形成了一定的生产规模。
1.2无刷直流永磁电动机与有刷直流永磁电动机的比较表1-1无刷直流永磁电动机与有刷直流永磁电动机的比较1.3 无刷直流电动机的结构及基本工作原理1.无刷直流电动机转矩分析电机本体的电枢绕组为三相星型连接,位置传感器与电机转子同轴,控制电路对位置信号进行逻辑变换后产生控制信号,控制动信号经驱动电路隔离放大后控制逆变器的功率开关管,使电机的各相绕组按一定的顺序工作。
图1-1 无刷直流电动机工作原理示意图如图1-1所示,当转子旋转(顺时针)到图a所示的位置时,转子位置传感器输出的信号经控制电路逻辑变换后驱动逆变器,使T1、T6 导通,即A、B两相绕组通电,电流从电源的正极流出,经T1流入A相绕组,再从B相绕组流出,经T6回到电源的负极,此时定转子磁场相互作用,使电机的转子顺时针转动。
当转子在空间转过60电角度,到达图b所示位置时,转子位置传感器输出的信号经控制电路逻辑变换后驱动逆变器,使T1、T2导通,A、C两相绕组通电,电流从电源的正极流出,经T1流入A相绕组,再从C相绕组流出,经T2回到电源负极。
此时定转子磁场相互作用,使电机的转子继续顺时针转动。
转子在空间每转过60电角度,逆变器开关就发生一次切换,功率开关管的导通逻辑为T1、T6—T1、T2—T3、T2—T3、T4—T5、T4—T5、T6—T1、T6。
在次期间,转子始终受到顺时针方向的电磁转矩作用,沿顺时针方向连续旋转。
转子在空间每转过60电角度,定子绕组就进行一次换流,定子合成磁场的磁状态就发生一次跃变。
可见,电机有6种磁状态,每一状态有两相导通,每相绕组的导通时间对应于转子旋转120电角度。
无刷直流电动机的这种工作方式叫两相导通星型三相六状态,这是无刷直流电动机最常用的一种工作方式。
2.无刷直流电动机与输出开关管换流信号无刷直流电动机的位置一般采用三个在空间上相隔120电角度的霍尔位置传感器进行检测,当位于霍尔传感器位置处的磁场极性发生变化时,传感器的输出电平将发生改变,由于三个霍尔传感器位检测元件的位置在空间上各差120电角度,因此从这三个检测元件输出端可以获得三个在时间上互差120度、宽度为180度的电平信号,分别用A、B、C来表示,如图1-2所示,以信号A为例,A相位置宽度为180电导角:在0-60度,T1必须导通,故T1状态为1,而C相还剩下60度通电宽度,所以此段时间为T1和T6等于1,(此时下部可供导通的管子为T4、 T6和T2,而为避免桥臂直通,T4不能导通;T2的导通时间未到,故只能是T6导通);而在60度—120度,此时只有A相通电,B和C相处于非导电期,故导通的开关管为T1和T2(T1和T2等于1),其中T2是为B相导电作准备;而在120度—180度时,由于每一相只有120电导角导电时间,故此时T1关断(T1=0),T2仍然导通(B相开始进入导电期),此时可知,T1关断,T5不能开通(防止桥臂直通),则此时只能开通T3,所以T3信号此时间段为1。
其他时间段的开关管导通情况与此类似。
理论上,只要保证三个位置传感器在空间上互差120度,开关管的换流时刻总是可以推算出来的。
然而,为了简化控制电路,每个霍尔传感器的起始安装位置在各自相绕组的基准点(r0=00)上.那么在r0=00的控制条件下,A相绕组开始通电的时刻(即该相反电势相位30度位置)恰好与A相位置传感器输出信号A的电平跳变时刻重合,此时应将T1开关管驱动导通。
同理,其他开关管的导通时刻也可以按同样方法确定。
本设计选用的是三相无刷永磁直流电动机,其额定电压UH=36V,电枢额定电流IaH =8.5A,电枢峰值电流IaP15A,额定转速nH=350r/min,额定功率PH=250W。
图1-2 无刷电动机位置检测及开关管驱动信号表1-2 无刷电动机直流通电控制方式开关切换表1.4 无刷直流电动机的运行特性1.4.1 机械特性无刷直流电动机的机械特性为:22222S T a s Te e e e t U U rI U U r n T C C C C δδδφφφ---==- (1-1) U T -开关器件的管压降I a -电枢电流Ce-电机的电动势常数-每级磁通量可见无刷直流电动机的机械特性与一般直流电动机的机械特性表达式相同,机械特性较硬。
在不同的供电电压驱动下,可以得到如1-3图所示机械特性曲线簇。
图1-3 机械特性曲线簇当转矩较大、转速较低时,流过开关管和电枢绕组的电流很大,这时,管压降随着电流增大而增加较快,使在电枢绕组上的电压有所减小,因而图所示的机械特性曲线会偏离直线,向下弯曲。
1.4.2 调节特性无刷直流电动机的调节特性如图1-4所示。
图1-4 调节特性调节特性的始动电压和斜率分别为:(1-2)(1-3)从机械特性和调节特性可以看出,无刷直流电动机与一般直流电动机一样,具有良好的调速控制性能,可以通过调节电源电压实现无级调速。
但不能通过调节励磁调速,因为永磁体的励磁磁场不可调。
1.4.3 工作特性电枢电流与输出转矩的关系、效率输出转矩的关系如图1-5所示。
图1-5 工作特性在输出额定转矩时,电机效率高、损耗低是无刷直流电动机的重要特点之一。
1.5 无刷直流电动机的应用与研究动向现阶段,虽然各种交流电动机和直流电动机在传动应用中占主导地位,但无刷直流电动机正受到普遍的关注。
自20世纪90年代以来,随着人们生活水平的提高和现代化生产、办公自动化的发展,家用电器、工业机器人等设备都越来越趋向于高效率化、小型化及高智能化,作为执行元件的重要组成部分,电机必须具有精度高、速度快、效率高等特点,无刷直流电机的应用也因此而迅速增长。
尤其在节能已成为时代主题的今天,无刷直流电机高效率的特点更显示了其巨大的应用价值。
无刷直流电机转子采用永久磁铁,其产生的气隙磁通保持为常值,因而特别适用于恒转矩运行;对于恒功率运行,无刷直流电机虽然不能直接改变磁通实现弱磁控制,但通过控制方法的改进也可以获得弱磁控制的效果。
由于稀土永磁材料的矫顽力高、剩磁大,可产生很大的气隙磁通,这样可以大大缩小转子半径,减小转子的转动惯量,因而在要求有良好的静态特性和高动态响应的伺服驱动系统中,如数控机床、机器人等应用中,无刷直流电机比交流伺服电机和直流伺服电机显示了更多的优越性。