基于MC33035芯片的无刷直流电机驱动系统设计
- 格式:doc
- 大小:1.05 MB
- 文档页数:59
产品说明MC33035是高性能第二代单片无刷直流马达控制电路。
它包含实现开环、三相或四相马达控制所需的全部功能。
此电路包括转子位子检测器,温度补偿基准,锯齿波振荡器,三个集电极开路的高速驱动器,和三个高电流的图腾柱低速驱动器,适用于驱动功率MOSFET 管。
此控制器还包含一些有保护特点的电路,如欠电压锁定,时间延迟可选的周期接周期限流控制,内部过热保护电路和一个独特的故障输出,易于和微控制系统连接。
典型的马达控制功能包括开环速率,前进/后退方向,运行使能和动态制动。
MC33035是专门为电气相位为60°/300°或120°/240°的马达电路设计的,并能有效的控制无刷直流马达。
DIP-24SOP-24• 10 ~ 30 V 工作电压 • 欠电压锁定• 6.25 V 基准传感器工作电源 • 闭环伺服应用中的误差放大器• 高电流驱动,可控制外部三相MOSFET 电桥• 周期接周期限流控制 • 管脚输出的电流感应基准 • 内部过热保护电路• 60°/300°或120°/240°传感器相位可选 • 通过外部MOSFET 电桥可有效控制产品归类产品型号工作温度封装MC33035DW SOP–24 MC33035PTA =-40° to +85°CDIP-24管脚连接低速驱动输出传感器输入/PWN 输入°选择典型原理图此器件包含了285个有效的晶体管。
极限参数参数符号范围单位电源电压VCC 40 V数字输入(管脚3, 4, 5, 6, 22, 23) – VrefV 振荡器输入电流(源电流或陷电流)IOSC 30 mA 误差放大器输入电压范围(管脚 11, 12,注1)VIR –0.3 ~ Vref V误差放大器输出电流(源电流或陷电流,注2)IOut 10 mA 电流检测输入电压(管脚9,15)VSense –0.3~5.0V故障输出电压VCE(Fault) 20 V故障输出陷电流ISink(Fault) 20 mA高速驱动电压(管脚1, 2, 24) VCE(top) 40 V高速驱动陷电流(管脚1, 2, 24) ISink(top) 50 mA低速驱动工作电压(管脚 18) VC 30V 低速驱动输出电流(源电流或陷电流,管脚19, 20, 21)IDRV 100 mA 功率消耗和热特性DIP-24最大功耗@ TA = 85°C 过热电阻,结对空SOP-24最大功耗@ TA = 85°C 热敏电阻,结对空电阻PDRθJAPDRθJA86775650100mW°C/WmW°C/W工作结温TJ 150°C环境温度TA –40 ~ +85 °C贮存温度Tstg –65~+150°C电气特性(除非特别制定,否则VCC = VC = 20 V, RT = 4.7 k, CT = 10 nF, TA = 25°C)参数符号最小值典型值最大值单位基准部分基准输出电压(Iref = 1.0 mA) TA = 25°CTA = –40°~ +85°C Vref5.95.826.24–6.56.57V线路调整(VCC = 10~30 V, Iref = 1.0mA)Regline -- 1.5 30 mV负载调整(Iref = 1.0~20 mA) Regload -- 16 30 mV输出短路电流(注 3) ISC 40 75 – mA基准欠电压锁定阈值 Vth4.04.55.0V误差放大器输入偏移电压(TA = –40° ~ +85°C) VIO -- 0.4 10 mV输入偏移电流(TA = –40°∼+85°C) IIO -- 8.0 500 nA输入偏置电流(TA = –40° ~ +85°C) IIB -- -46 -1000 nA输入共模电压VICR (0 V ~ Vref) V开环电压增益(VO = 3.0 V, RL = 15 k) AVOL 70 80 -- dB输入共模抑制比 CMRR5586--dB 电源抑制比(VCC = VC = 10 to 30 V) PSRR 65 105 -- dB输出电压摆浮高电平状态(RL = 15 k to Gnd) 低电平状态(RL = 15 k to Vref)VOHVOL4.6–5.30.5–1.0V振荡单元振荡频率 fOSC222528kHz 频率随电压改变(VCC = 10~30 V) ∆fOSC/∆V – 0.01 5.0 %锯齿波峰值电压 VOSC(P)–4.14.5V锯齿波谷值电压 VOSC(V)1.21.5–V逻辑输入输入阈值电压(管脚3, 4, 5, 6, 7, 22, 23)高电平状态低电平状态VIHVIL3.0--2.21.7--0.8V传感器输入(管脚4, 5, 6)高电平输入电流(VIH = 5.0 V) 低电平输入电流(VIL = 0 V)IIHIIL-150-600-70-337-20-150µA前进/后退,60°/120°可选(管脚3, 22, 23)高电平输入电流(VIH = 5.0 V) IIHIIL-75-300-36-175-10-75µA低电平输入电流(VIL = 0 V)输出使能高电平状态输入电流(VIH = 5.0 V) 低电平状态输入电流VIL =0V IIHIIL-60-60-29-29-10-10µA限流比较仪阈值电压 Vth85101115mV 输入共模电压 VICR--3.0--V输入偏置电流 IIB---0.9-5.0µA输出和电源单元高速驱动输出饱和陷电压(Isink = 25 mA) -- 0.51.5 V高速驱动输出关闭状态漏电流(VCE = 30 V) -- 0.06100 µA高速驱动输出转换时间(CL = 47 pF, RL = 1.0 k)上升时间下降时间trtf––10726300300ns低速驱动输出电压高电平状态(VCC = 20 V, VC = 30 V, Isource = 50 mA)低电平状态(VCC =20V, VC = 30V, Isink = 50 mA) VOHVOL(VCC-2.0)--(VCC-1.1)1.5--2.0V故障输出饱和陷电压(Isink = 16 mA) VCE(sat) -- 225 500 mV 故障输出关闭状态漏电流(VCE = 20 V)IFLT(leak) -- 1.0 100 µA欠电压锁定驱动输出允许 (VCC 或VC 增加)滞后Vth(on)VH8.20.18.90.2100.3V电源电流管脚17 (VCC = VC = 20 V)管脚17 ( VCC = 20 V, VC = 30 V) 管脚18 ( VCC = VC = 20 V)管脚18 (VCC = 20 V, VC = 30 V) ICCIC--------12143.55.01620 06.010mA注: 1.输入共模电压或输入信号电压不能低于-0.3V。
直流无刷电机驱动器ATE33035使用说明介绍ATE33035(替代MC33035)是一种单片的直流无刷电机控制器,它包含了开环控制的三、四相电机控制系统所需的全部功能。
此外,也可以用于控制直流有刷电机。
采用双极性模拟技术,其全功能和高耐用性非常适合与恶劣的工业环境。
功能包括:1、准确转动位置测序的转子译码器;2、参考与电源电压传感器的温度补偿;3、可预设频率的锯齿波振荡器;4、全接近误差放大器;5、脉宽调制比较器;6、上部的三个集电极开路驱动器;7、下部的三个用于驱动功率场效应管MOSFET的大电流图腾柱电路。
保护功能包括:1、欠压锁定;2、可预设关断延迟时间的逐周期电流限制模式;3、内部热关断;4、可以连接到微处理器控制系统的故障输出端口。
电机控制功能包括:1、开环时间控制;2、正、反向运行控制;3、可控的启用和制动。
4、可以通过60°/ 120°选择引脚设置转子位置解码器,用于60°或120°的电机相位传感器输入。
方框图功能说明典型应用方框图见图19,其它各种应用方框图见图36,38,39,43,45和46。
下面各种方框图中关于内部功能和特性的说明,都要参照图19和图36。
转子位置译码器内部转子位置译码器监控三个传感器输入(管脚4,5,6)为上部和下部驱动提供适当的输出顺序。
传感器输入端口设计为可以直接连接到集电极开路型霍尔效应开关或光电耦合器(通过旋转开槽孔)。
内部上拉电阻可以保证外部器件的小信号输入有效。
兼容典型门限为2.2 V 的TTL电平输入。
ATE33035设计用于常用的三、四相位传感器的电动机控制。
通过管脚22(60°/120°选择输入)可以便利的完成A TE33035内部设置,能够控制60°、120°、240°和300°电相位传感器的电动机。
三个传感器输入能够组合成八组可能的输入代码,其中的六组用于有效转子位置。
MC33035芯片对无刷直流电机驱动系统设计
一、无刷直流电机控制设计
二、无刷直流电机驱动电路设计
在选择功率管时,需要考虑电机的驱动需求和电机的特性。
通常选择
耐压高、开关速度快的功率管,以提高电机的性能和驱动效率。
功率管驱动电路设计要保证稳定、快速的开关过程。
可使用反相器、
驱动电流放大器等电路来实现功率管的驱动。
此外,还需要考虑驱动电路
的功率损耗和保护电路,以提高系统的可靠性。
三、无刷直流电机驱动系统通信接口设计
在通信接口设计中,需要考虑通信协议和数据传输速率等方面的设计。
通信协议可选择SPI、I2C等,要根据系统的要求和外部设备的兼容性进
行选择。
数据传输速率应根据系统的实时性要求和通信距离等因素进行优化。
根据实际情况选择合适的传输速率,以保证系统的性能和稳定性。
四、无刷直流电机驱动系统保护设计
无刷直流电机驱动系统中应包含一些保护功能,以避免电机和驱动器
的损坏。
常见的保护功能包括过压保护、过流保护、过热保护等。
过压保护可通过采用过压检测电路来实现,一旦检测到过压情况,即
可切断电机的电源,保护电机和驱动器的安全。
过流保护可通过电流检测电路来实现,一旦检测到过流情况,即可切
断电机的电源或降低电机的功率输出。
过热保护可通过温度传感器来实现,一旦检测到电机或驱动器温度过高,即可切断电机的电源或降低电机的功率输出。
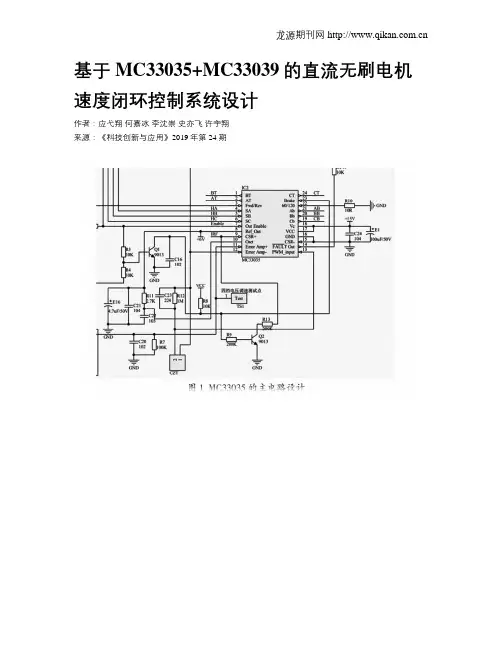
基于MC33035+MC33039的直流无刷电机速度闭环控制系统设计作者:应弋翔何嘉冰李沈崇史亦飞许宇翔来源:《科技创新与应用》2019年第24期摘; 要:文章详细介绍了Motorola公司的第二代直流无刷电机控制器专用芯片MC33035的基本原理,在分析了直流无刷电机的结构特点及应用现状后,设计了基于MC33035和MC33039及一些集成电路构成的小功率直流无刷电机的速度闭环控制系统,并进行了调试及试验,确认了其简单和优越的控制性能。
在设计的过程中加入了电机的过温保护,使无刷电机在实际工作环境中无故障安全运行。
关键词:MC33035;MC33039;直流无刷电机;闭环控制中图分类号:TM359.9 文献标识码:A 文章编号:2095-2945(2019)24-0049-04Abstract: In this paper, the basic principle of MC33035, a special chip for the second generation brushless DC motor controller made by Motorola Company, is introduced in detail. After analyzing the structure characteristics and application status of the brushless DC motor, the speed closed loop control system of low power brushless DC motor based on MC33035, MC33039 andsome integrated circuits is designed, debugged and tested, and its simple and superior control performance is confirmed. In the process of design, the overtemperature protection of the motor is added, so as to make the brushless motor operate safely without fault in the actual working environment.Keywords: MC33035; MC33039; brushless DC motor; closed-loop control 引言近年來,我国中小型电机和特微电机行业迅速发展,其中直流无刷电机以其高效低噪等特点逐渐取代有刷电机,成为行业的一颗新星。
MC33035的驱动输出电路MC33035的3个上侧驱动输出(1、2、24脚)是集电极开路的NPN型晶体管,其吸入电流能力为50mA,耐压为40V,可用来驱动外接逆变桥上桥臂的NPN型功率晶体管和P沟道MOSFET功率管。
3个下侧驱动输出(19、20、21 脚)是推挽输出,电流能力为100mA,可直接驱动外接逆变桥的PNP型功率晶体管和N沟道功率MOSFET。
下侧驱动输出的电源VC由18脚单独引人,与供给电机的电源Vcc分开。
为配合标淮MOSFET栅漏电压不大于20V的限制,18脚上宜接一个18V稳压二极管进行钳位。
如图所示为三相全波换相波形图,它给出了输入的位置传感器信号、6个驱动输出、电机相电流对应时序图。
图中第1个周期表示了无PWM的情况,而第2个周期是有50%PWM的情况。
这里的位置传感器BLDCM驱动电路的逆变桥采用MOTOROLA公司生产的MPM3003三相逆变桥功率模块,它是12脚功率封装型的三相电桥。
上侧3个晶体管是导通电阻为0.28Ω的p沟道功率MOSFET管,下侧3个晶体管是导通电阻为0.15Ω的N沟道功率MOSFET管,6个管子的漏源额定电压为60V,电流为10A。
各功率管均有反向续流二极管,供电电源压降为10~30V。
这种新型的MOS功率管具有比第1代MOS功率管更稳定来用的特点。
首先,新型MOS功率管内部接有漏一源二极管,因此能承受更大的电流或电压变化,而第1代MOS功率管常因反向恢复二极管的过载而损坏;其次,短暂的漏一源过电压不易使其损坏;而且,MPM3003内部的MOS管栅一源间最小额定击穿电压为40V,而工业标准为20V。
击穿电压高,不仅可提高管子对静电放电和意外的栅一源电压脉冲的承受力,而且对所有工作电压来说,栅极氧化层的工。
直流无刷电机工作原理与控制方法用A TE33035(替代MC33035)可以很方便的控制直流无刷电机。
直流无刷电机既具有交流电机的结构简单、运行可靠、维护方便等优点,又具备直流电机的运行效率高、无励磁损耗以及调速性能好等优点。
由于传统的直流电机均采用电刷以机械方法进行换向,因而存在相对的机械摩擦,由此带来了噪声、火化、无线电干扰以及寿命短等缺点。
随着电力电子工业的飞速发展,许多高性能半导体功率器件,如GTR、MOSFET、IGBT、IPM 等相继出现,以及高性能永磁材料的问世,均为直流无刷电机的广泛应用奠定了坚实的基础。
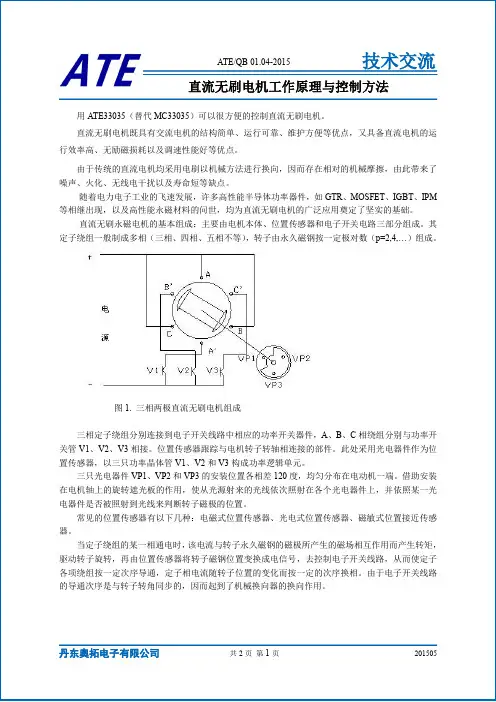
直流无刷永磁电机的基本组成:主要由电机本体、位置传感器和电子开关电路三部分组成。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(p=2,4,…)组成。
图1. 三相两极直流无刷电机组成三相定子绕组分别连接到电子开关线路中相应的功率开关器件,A、B、C相绕组分别与功率开关管V1、V2、V3相接。
位置传感器跟踪与电机转子转轴相连接的部件。
此处采用光电器件作为位置传感器,以三只功率晶体管V1、V2和V3构成功率逻辑单元。
三只光电器件VP1、VP2和VP3的安装位置各相差120度,均匀分布在电动机一端。
借助安装在电机轴上的旋转遮光板的作用,使从光源射来的光线依次照射在各个光电器件上,并依照某一光电器件是否被照射到光线来判断转子磁极的位置。
常见的位置传感器有以下几种:电磁式位置传感器、光电式位置传感器、磁敏式位置接近传感器。
当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各项绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
图2. 各相绕组的导通示意图三相永磁无刷直流电机转子位置传感器输出信号VP1、VP2、VP3在每360 电角度内给出了6个代码,按其顺序排列,6个代码是101、100、110、010、011、001。
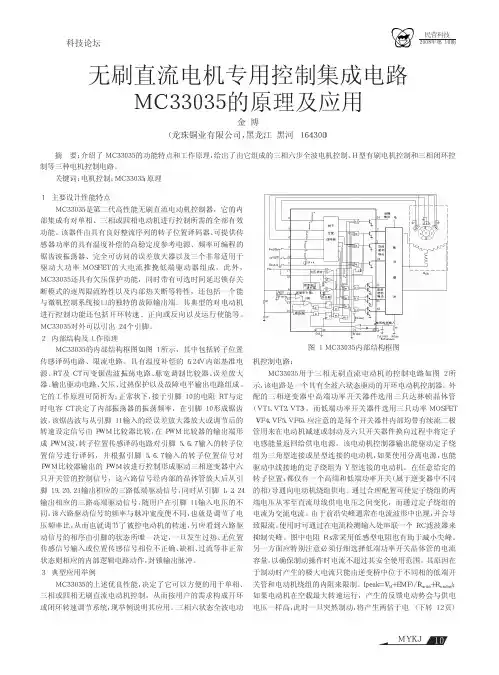
无刷直流电机控制器MC33035的原理及应用无刷直流电机控制器MC33035的原理及应用摘要:MC33035是美国安森美公司开发的高性能第二代单元无刷直流电机控制器,它包含开环三相或四相电机控制所需的全部有效功能。
该器件由具有良好整流序列的转子位置译码器、可提供传感器功率的温度补偿参考、频率可编程的锯齿波振荡器、完全可访问的误差放大器以及三个非常适用于驱动大功率MOSFET的大电流推挽底部驱动器组成,因而是一种功能齐全的电机控制器。
文中介绍了MC33035的特点功能和工作原理,给出了由它组成的三相六步全波电机控制和H型电机有刷控制等两种电机控制电路。
关键词:无刷直流电机控制 MC330351 概述MC33035无刷直流电机控制器采用双极性模拟工艺制造,可在任何恶劣的工业环境条件下保证高品质和高稳定性。
该控制器内含可用于正确整流时序的转子位置译码器,以及可对传感器的温度进行补偿的参考电平,同时它还具有一个频率可编程的锯齿波振荡器、一个误差信号放大器、一个脉冲调制器比较器、三个集电极开路顶端驱动输出和三个非常适用于驱动功率场效应管(MOSFET)的大电流图腾柱式底部输出器。
此外,MC33035还有欠锁定功能,同时带有可选时间延迟锁存关断模式的逐周限流特性以及内部热关断等特性。
其典型的电机控制功能包括开环速度、正向或反向、以及运行使能等。
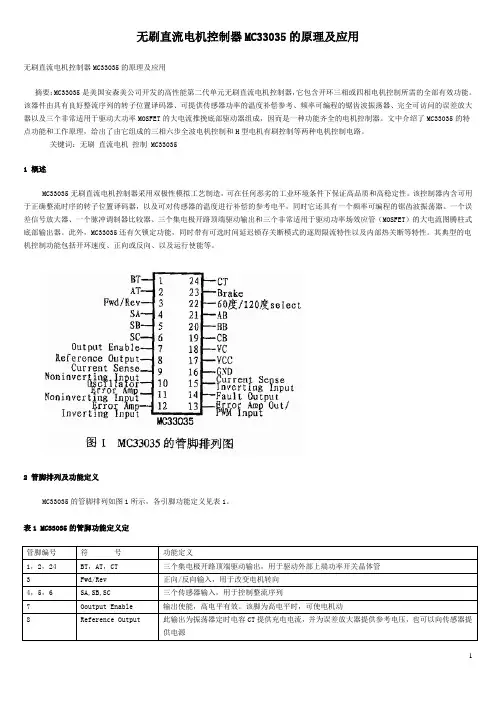
2 管脚排列及功能定义MC33035的管脚排列如图1所示,各引脚功能定义见表1。
表1 MC33035的管脚功能定义定管脚编号符号功能定义1,2,24 BT,AT,CT 三个集电极开路顶端驱动输出,用于驱动外部上端功率开关晶体管3 Fwd/Rev 正向/反向输入,用于改变电机转向4,5,6 SA,SB,SC 三个传感器输入,用于控制整流序列7 Ooutput Enable 输出使能,高电平有效。
该脚为高电平时,可使电机动8 Reference Output 此输出为振荡器定时电容CT提供充电电流,并为误差放大器提供参考电压,也可以向传感器提供电源表2 三相六步换向器真值表输入60度SA SB SC 120度SA SB SC 正向/反向使能电流检测顶部驱协AT BT CT 底部驱动AB BB CB1 0 0 1 0 0 1 1 01 1 0 1 1 0 1 1 01 1 1 0 1 0 1 1 00 1 1 0 1 1 1 1 00 0 1 0 0 1 1 1 00 0 0 1 0 1 1 1 01 0 0 1 0 0 0 1 01 1 0 1 1 0 0 1 01 1 1 0 1 0 0 1 00 1 1 0 1 1 0 1 00 0 1 0 0 1 0 1 00 0 0 1 0 1 0 1 01 0 1 1 1 1 X X X0 1 0 0 0 0 X X XV V V V V V X 0 X V V V V V V X 1 X 表中,V表示六个有效传感器或驱动组合中的一个,X表示无关;输入逻辑0定义为小于85mV,逻辑1为于115mV3 工作原理MC33035的内部结构框图如图2所示。
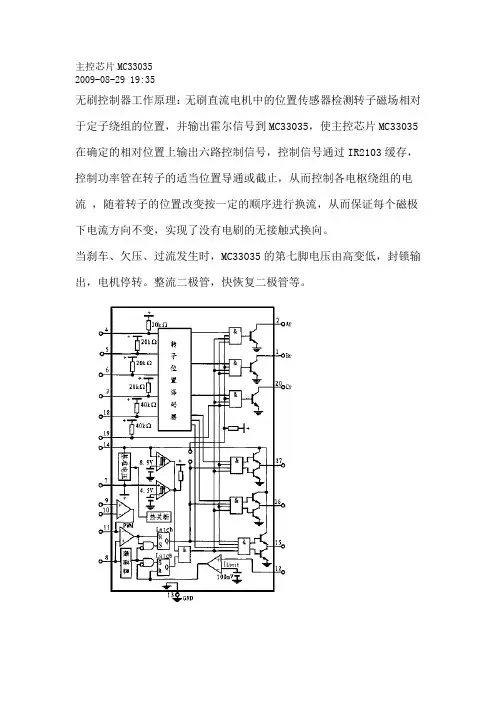
主控芯片MC330352009-08-29 19:35无刷控制器工作原理:无刷直流电机中的位置传感器检测转子磁场相对于定子绕组的位置,并输出霍尔信号到MC33035,使主控芯片MC33035在确定的相对位置上输出六路控制信号,控制信号通过IR2103缓存,控制功率管在转子的适当位置导通或截止,从而控制各电枢绕组的电流,随着转子的位置改变按一定的顺序进行换流,从而保证每个磁极下电流方向不变,实现了没有电刷的无接触式换向。
当刹车、欠压、过流发生时,MC33035的第七脚电压由高变低,封锁输出,电机停转。
整流二极管,快恢复二极管等。
无刷控制器主要元件1)电阻:在电路中起降压和分流作用,用R表示。
2)电容:在电路中起滤波作用,用C表示。
3)二极管:具有单向导电性,正向测有数值,反向测为无穷大,常用的有稳压二极管,开关二极管,4)三极管:在电路中起电流放大的作用,主要有7815、7805、9013等。
5)场效应晶体管:功率管为RFP50N06。
6)集成电路6.1)MC33035无刷直流电机控制器主控芯片。
6.1.1)MC33035主控芯片各脚功能。
6.1.2)1、2、24脚驱动上功率管,19、20、21脚驱动下功率管。
6.1.3)第3脚控制电机正反转。
6.1.4)第4、5、6脚为电机霍尔信号输入,电压为6.25V。
6.1.5)第7脚决定MC33035的状态,处于高电平时有输出。
过流,刹车,欠压时第7脚处于低电平状态,封锁输出。
6.1.6)第8脚为参考电压,输出6.25V。
6.1.7)第9脚接地。
6.1.8)第10脚振荡器,产生PWM波,由第8脚提供电压。
6.1.9)第11脚调速信号输入,1.0-4.2或4.8V。
6.1.10)第11、12、13脚相连,11、12内部连,12、13外部连。
6.1.11)第14、15、16脚接地。
6.1.12)第17脚为工作电压24V由7824提供或工作电压为15V。
6.1.13)第18脚为15V电压。
1 MC33035功能介绍MC33035是安森美公司推出的第二代无刷直流电机控制专用集成电路,主要组成部分包括转子位置传感器译码电路、带温度补偿的内部基准电源、频率可设定的锯齿波振荡器、误差放大器、脉宽调制(PWM)比较器、输出驱动电路、欠压封锁保护、芯片过热保护等故障输出电路和限流电路等。
MC33035的典型控制功能包括PWM速度控制、使能控制(启动或停止)、正反转控制、相位选择和制动控制等。
芯片功能引脚定义如表1所列。
SA、SB、SC为霍尔信号输入端,内部上拉20 kΩ电阻,外接霍尔传感器即可。
Fwd/Rew、Brake、Output Enable和60°/120°Select分别为方向、制动、使能和霍尔相位控制端口,内部上拉40 kΩ电阻,MCU控制端只要通过光耦或者三极管开漏接地即可进行控制。
如果不采用IC内置的硬件速度环,则将PIN12、13短接,通过PIN11端口输入PWM即可对电机进行调节控制。
如果采用IC内置的硬件速度环则将PIN12、13通过R、C连接,通过PIN11端口输入PWM进行电机控制,HALL换向反馈信号通过PIN12端口输入。
2 基于MC33035的直流无刷电机控制驱动电路设计在本设计中主控制器以Freescale公司的基于PowerPC构架的32位处理器MPC5604P为例,MPC5604P控制端口通过比较器和MC33035接口,设计了基于MC33035直流无刷电机控制驱动电路。
传统的直流无刷电机控制驱动电路采用MPC5604P、预驱动IC和MOSFET 实现,其中包括电压泵即自举电路。
本设计是基于直流无刷电机控制芯片MC33035实现的,MC33035实现预驱动和电子自动换向功能,采用MC33035实现直流无刷电机的控制驱动电路,既简化了电路设计,同时也减轻了MPC5604P 的运算量。
MPC5604P和MC33035之间通过光耦或者比较器实现电平转换。
MC33035是MOTOROLA公司第二代无刷直流电动机控制专用集成电路,外接功率开关器件和电子测速器MC33039,可构成闭环调速系统来控制三相(全波或半波)、两相或四相无刷直流电机。
它通过下侧半桥输出PWM对电机进行调速。
2MC33035的功能和组成2.1功能——可控制电机正反转;——实现电机刹车制动;——启停功能;——可选择三相无刷直流电机传感器相位差60°或120°;——欠压封锁保护,IC过热保护和故障输出。
2.2组成——转子位置传感器译码电路;——限流电路;——具有温度补偿的6.24V内部基准电源;——RT、CT可变锯齿波振荡电路;——脉宽调制比较器;——误差放大器;——输出驱动电路;——欠压、过热保护以及故障电平输出。
2.3引脚功能参见表1。
表 1 MC33035的引脚功能3MC33035的应用图1是MC33035与MC33039构成的闭环三相无刷直流电机控制电路图。
其电路各部分功能介绍:1)脚4、5、6是传感器位置信号输入,MC33035通过对输入位置信号译码对应输出驱动电机。
这三个信号与TTL电平兼容。
当输入全“0”或“1”表示非法信号。
故障输出端(引脚14)输出有效低电平。
通过选择引脚22来确定输入三相信号相位差为60°还是120°。
2)阻容RT、CT与内部振荡器产生锯齿波,作为PWM载波信号。
锯齿波幅值为1.5V~4.1V。
为防止噪声干扰,载波频率不宜过低,但频率太高容易使功率管过热,建议载波频率为20kHz~30kHz。
锯齿波是由引脚8输出6.24V参考电压经RT对CT充电,通过内部电路放电所产生。
由引脚11给定速度电压以及来自MC33039引脚5的速度方波信号经积分形成斩波信号与锯齿波形成PWM,参见图2,CT、误差输出PWM、内部锁存、上桥、下桥、错误信号对应时间关系如图3。
构成闭环的主要原理是当负载改变(如变大),则电机速度下降,测速器MC33039引脚5输出方波密度变低,此信号经积分形成斩波信号后幅值抬高,则使输出PWM占空比加大,输出电流增加,自然速度逐渐提高,以达到输出跟踪输入。
无刷直流电机控制器MC33035的原理及应用1. 简介无刷直流电机(BLDC)是现代电动机领域的重要组成部分,广泛应用于电动汽车、家用电器、工业自动化等领域。
无刷直流电机控制器MC33035是一款常用控制器之一,本文将介绍MC33035的工作原理及其应用。
2. MC33035的工作原理MC33035是一种三相直流无刷电机控制器,它采用了先进的空闲轴暂态电流控制的技术,能够实现高效的电机控制。
下面将详细介绍MC33035的工作原理。
2.1 相电流控制MC33035通过调节不同相的电流来控制电机的转速和转向。
它采用了一个电流环路和一个速度环路来实现精确的控制。
在电流环路中,MC33035通过PWM方式驱动功率MOSFET,调节电机相的电流大小和方向。
通过改变电流大小和相序,MC33035能够控制电机的转速和转向。
2.2 空闲轴暂态电流控制MC33035还采用了空闲轴暂态电流控制技术,通过改变暂态电流的大小和时序来提高电机的控制精度和效率。
在暂态电流控制过程中,MC33035会检测电机的转速和电流,并根据设定的参数进行调整,以实现最佳的控制效果。
3. MC33035的应用MC33035广泛应用于各种无刷直流电机控制系统中,具有以下特点和优势:3.1 高效性能MC33035采用了先进的控制算法和技术,能够实现高效的电机控制。
其空闲轴暂态电流控制技术可以显著提高电机的效率,减少能量损耗。
3.2 稳定可靠MC33035具有良好的稳定性和可靠性,能够在复杂的工作环境下稳定运行。
它能够自动检测和保护电机,防止过电流、过电压等故障发生。
3.3 灵活可编程MC33035具有丰富的控制参数和接口,可以根据不同的应用需求进行灵活配置。
用户可以通过编程来调整控制算法和参数,实现定制化的控制方案。
3.4 广泛应用MC33035广泛应用于电动汽车、电动工具、家用电器、工业自动化等领域。
它可以控制不同功率和转速范围的电机,满足各种应用需求。
第22卷第6期2008年11月山东理工大学学报(自然科学版)Journal of Sha ndong U nive rsity of Technology (Natural Science Edition)Vol.22No.6Nov.2008收稿日期2526作者简介李环环(2),女,硕士研究生文章编号:1672-6197(2008)06-0087-03抽油机直接驱动无刷直流电动机控制器设计李环环,张存山,赵志堂(山东理工大学电气与电子工程学院,山东淄博255049)摘 要:为改善传统抽油机高速驱动、多级传动带来的效率低、功率因数低、维护费用高、噪声大等缺点,设计了基于MC33035的无刷直流电动机控制器,采用低速运行的大轮盘永磁电机直接驱动抽油机实现油杆的往复运动.关键词:无刷电机;抽油机;控制器;MC33035中图分类号:TM301.2文献标识码:ADesign o f br ushless DC motor contr oller dr iven dir ectly by pumping unitL I Huan 2huan ,ZHAN G Cun 2shan ,ZHAO Zhi 2tang(School of Elect rical a nd Electronic Engineering ,Sha ndong U nive rsity of Technology ,Z ibo 255049,China)A bstract :The t raditional pumpi ng uni t s ha ve such short comings a s low efficiency ,low power ra 2tio ,high maint ena nce co st s and big noi se ,which are caused by hi gh -speed dri vi ng and m ulti -level t ra nsmi ssion.In or de r to overcome t hese shortco mi ngs ,a brushl ess DC motor cont rolle r was desi gned based on MC33035.In t his design ,t he p umping unit was driven directly by a lar ge low -spee d ext er nal rotor.K ey w or ds :brushle ss DC motor ;pumpi ng unit ;cont roller ;MC33035 目前国内外抽油机以游梁式为主,这种抽油机以高速电动机作为动力,经变速箱减速,再通过连杆、游梁传递给油杆,经过多级传动,能量损耗大,系统效率低[1].采用大轮盘外转子无刷直流电机直接驱动抽油机,去掉了游梁、驴头和复杂的减速箱等机械结构,简化了整个系统,缩短了传动链,提高了效率和功率因数.1 抽油机控制系统设计方案以MC33035为核心构成的抽油机直接驱动无刷直流电动机控制系统,采用PWM 方式控制电机的转矩和转速,用电机内置的霍尔位置传感器检测转子位置,由MC33035接收霍尔位置传感器的位置信号,并对其进行译码,决定哪个电极换向.以IG B T 作为功率变换器件,采用三相全桥驱动.由于抽油机的载荷是周期性波动的,为了根据载荷调节控制电动机转速,整个控制系统采用速度单闭环控制.系统控制框图如图1所示.2 控制器设计2.1 控制系统主回路设计逆变电路为三相全控桥.I G B T 既具有MOS 2F ET 的输入阻抗高、速度快、热稳定性好和驱动电路简单的特点,又具有GTR 的通态电压低耐高压和承受大电流的特点,因此逆变电路的设计采用了6个N 沟道I G B T ,并采用EX B841驱动.本设计中上桥臂的3个N 沟道I G B T ,门极高电平导通,因此需要在MC33035和驱动电路之间接反向器.下桥:200801:1982.图1 系统控制图臂的IGBT 直接驱动.MC33035输出的用于驱动功率管的PWM 信号幅值有6.25V ,100mA ,可以直接驱动EX B841.EX B841本身自带光耦,无需再加光电隔离器件[2].2.2 调速设计在本系统中,MC33035是电机控制器,MC33039是电子测速器.位置传感器的信号反馈到测速电路,测速电路经F/V 变换,将位置传感器的输出信号变成正比于电机转速的电压信号[3],经主控电路实现电机精确调速控制;位置传感器反馈信号经主控电路译码成六路驱动输出信号,控制逆变桥电路正常工作;电机的三相绕组为Y 连接,逆变桥电路工作在全控桥两两通电方式.锯齿波振荡器的振荡频率由外接定时组件C 1和R 1决定.每个周期由基准电压V REF (8脚)经R 1向C 1充电,然后C 1上电荷通过内部一晶体管迅速放电而形成锯齿波振荡信号,其波峰和波谷分别是4.1V 和1.5V.所以10管脚的输入近似为一三角波,其频率由12πR 1×C 1决定.R 2为控制无刷电机转速的电位器,通过该电位器改变11管脚对地的电压,从而来改变电机的转速.运算放大器1由外部接成一个跟随器的形式,所以l1管脚的对地电压即为比较器2的反相输入电压,通过电位器R 2改变11脚的对地电压从而改变比较器2的输出方波的占空比,即比较器2的输出为我们所需的PWM 信号.控制三个下侧驱动输出,改变输出脉冲宽度,相当于改变供给电机绕组的平均电压[4],从而控制其转速和转矩.其原理如图2所示.图2 脉宽调制信号原理图3 检测与保护回路硬件设计3 电流检测与过流保护电路设计采用霍尔电流传感器L T5S 进行电流检测.L T58-S7是瑞士L EM 品牌的基于霍尔原理的闭环(补偿)电流传感器.其主要参数:电源电压V C =±15V ,原边额定有效值电流I PN =50A ,原边电流测量范围I P =0~70A ,副边额定有效值电流I SN=50mA ,转换率K N =1/1000.其示意图如图3所示.图3 霍尔电流传感器其中,R M 的值要根据实际的原边电流来确定.设计中,原边最大电流I P =15A ,副边电流I S =I P ×K N =15mA ,R M =10mV/15mA =0.67Ω.2.3.2 转子位置检测该系统的无刷直流电机内置有3个霍尔效应传感器用来检测转子位置[5],一旦决定电机的换相,就可以根据该信号来计算电机的转速.传感器的输出端直接接MC33035的4、5、6管脚.当电机正常运行时,通过霍尔传感器可得到3个脉宽为180°电角度的互相重叠的信号,这样就得到6个强制换相点,MC33035对3个霍尔信号进行译码,使得电机正确换相.2.3.3 欠压保护MC33035的17管脚的当输入电压低于9.1V 时,该比较器的反相输人为内部一9.1V 标准电压,此时MC33035通过与门将驱动下桥的三路输出全部封锁,下桥的三个功率三极管全部关断,电机停止运行,起欠压保护作用.过热保护等功能是芯片内部的电路,无需设计外围电路,在此不再赘述.2.4 电动机转向设计无刷直流电机直接驱动抽油机的结构,控制器的设计应满足电动机正转240°再反转240°的特殊要求.电动机内部共使用五个霍尔开关传感器,其中围绕电机周围的三个H1,H2,H3用来检测转子位置,并把检测到的信号送入MC33039和MC33035进行电机控制,其余两个H4,H5用来控制电机的正反转,使电机实现在240°的范围内转动.磁铁C T 的N 极和两个霍尔传感器在一个同心圆上.MC33035的23脚是制动控制端,当此管脚置高电平时,顶端驱动输出关闭,底端驱动输出导通,使电机反电动势短接,实现快速制动R S 触发器的输出端Q 连接M 3335的3脚,88山东理工大学学报(自然科学版)2008年 2.2..18-7.C 0由于MC33035的3脚的初始值是高电平,23脚的初始值是低电平,所以开始时控制电机正转.当磁铁使霍尔开关传感器H4触发,R S 触发器的RD =1,S D =0.此信号经转向控制电路使23管脚保持一定时间高电平,电机制动后,23脚变为低电平,稍后又经一定时间的延时,Q 端的0状态到达MC33035的3脚,电机开始反转.当电机反转240°时磁铁随着电机到达霍尔开关传感器H5并使其触发,此时R S 触发器的RD =0,SD =1,此信号经转向控制电路使23管脚保持一定时间高电平,电机制动后,23脚变为低电平,稍后又经一定时间的延时,Q 端的1状态到达MC33035的3脚,电机开始正转.正转240°又开始反转,如此周而复始,实现电机的转动角度为240°整个控制器电路和转向控制电路如图4和图5所示:3 结束语采用了无刷直流电机的专用集成控制芯片MC33035设计了抽油机直驱电机控制器,同时用MC33039引入转速闭环进行控制以实现更好的调速功能,并对电机在240°的范围内旋转的特殊要求进行了专门的设计.参考文献:[1]陶景明.采油机械[M].北京:石油工业出版社.1988.[2]韦 敏,方立宁.基于专用集成芯片的无刷直流电机控制器[J ].机械与电子,2005,(7):31233.[3]孙欢庆,李桥梁.MC33035在直流无刷电机控制中的应用[J ].电机技术,2007,(3):27230.[4]李兵.基于MC33035芯片电动车无刷直流电机闭环控制器[J ].轻工机械,2007,25(5):61263.[5]袁伟涛,张连凯.300V 无刷直流电机控制系统的设计[J ]//科技信息(学术研究),2008,(8):16217.图4 控制电路部分图5 转向控制电路98第6期 李环环,等:抽油机直接驱动无刷直流电动机控制器设计。
第25卷第5期舡韶越V01.25No.52007年10月L舭D女嘶Mm№"Oct2007(安擞农业走学工学院,安徽舍肥230036)摘要:国内电动丰无刷直流电机控制嚣大都采用分立元件,使得控制系统的设计调试复杂。
介绍了Motorola公司的第2代直流无刷电机控制器专用芯片MC33035的基本原理,设计了一种基于MC33035,Mc33039,MPM3003的电动车闭环无刷电机控制器,介绍了具体参数。
所设计的电路抗干扰性强,可靠性高,稳定性好,可内嵌到电机内部。
关键词:无刷直流电机I闭环控制器}MC33035芯片中图分类号:TP27l;V484文献标志码:A文章编号:1005—2895(2007)05—0061—030引盲近年来,由于石油能源的日益紧张及人们环境保护意识的增强,电动助力车深受欢迎。
永磁直流无刷电机驱动成为电动车的发展方向。
它由定子、转子和转子位置检测元件霍尔传感器等组成,既具备交流电机的结构简单、运行可靠、维护方便等优点,又具备了直流电机运行效率高,调速性能好等优点,在电动车等电器设备中得到广泛应用。
目前,国内电动车无刷直流电机控制器设计大都采用分立元件,使得控制系统的设计和调试复杂。
要占用较大的电路板,与把控制器内嵌到电机内部的要求相矛盾[1]。
Mc33035是Motorola公司的第二代直流无刷电机控制器专用芯片,Mc33039是Motorola公司生产的直流无刷电机控制器闭环速度控制专用芯片,MPM3003是Motorola公司生产的电机驱动芯片,输出最高峰值电流高达25A。
基于这3种芯片设计的电动车闭环无刷直流电机控制器所需的外围电路简单,抗干扰性强,可靠性高,稳定性好等优点,特别适合对控制器体积要求较高的场合o-531控制芯片Mc33035Mc33035是24脚的双列直插窄式集成电路块,其内部结构如图1所示。
其主要功能有:(1)转子位置译码器接受转子位置检测器的信号,处理后生成6路输出驱动信号控制逆变桥的正确换流;(2)故障与处理包括欠压、过热、误码、过流等;(3)正/反转控制改变6路输出驱动信号的顺序,以改变定子绕组的电流方向,从而改变电机转向;(4)制动封锁所有上桥臂的驱动信号,使电机与电源隔离,同时打开所有下桥臂的驱动信号,短接电机的电动势,使电机迅速减速;(5)内部振荡器决定PwM的调制频率;(6)转速给定包括1个误差放大器和1个PwM比较器,给定的转速信号与振荡器的输出锯齿波相比较,产生PwM控制信号;(7)内部基准电压不仅用于内部比较器和振荡器的电源,还输出作为转子位置检测器的电源。
基于MC33035的无刷直流电机驱动控制系统设计摘要随着社会的发展和人民的生活水平提高,人们对交通工具的需求也在不断发展和提高。
电动自行车作为一种“绿色产品”已经在全国各省市悄然兴起,进入千家万户,成为人们,特别是中老年人和女士们理想的交通工具,受到广大使用者的喜爱。
MC33035的典型控制功能包括PWM开环速度控制、使能控制(起动或停止) 、正反转控制和能耗制动控制。
此芯片具有过流保护、欠压保护、欠流保护、又因此芯片低成本、高智能化、从而简化系统构成、降低系统成本、增强系统性能、满足更多应用场合的需要。
设计的直流无刷电机控制器是采用 MC33035 芯片控制的,以本次设计结果表明,MC33035的典型控制功能带有可选时间延迟锁存关断模式的逐周限流特性以及内部热关断等特性。
电动自行车作为一种新型交通工具已经在社会上引起很大的影响并受到广大使用者的喜爱。
关键词:电动自行车,无刷直流电机,MC33035,位置传感器THE BRUSHLESS DC MOTOR DRIVE SYSTEM DESIGNBASED ON MC33035 CHIPABSTRACTWith the rapid development of technology, new energy technologies in recent years have been widely used. For example, the small size, light weight, high efficiency, low noise, large capacity and high reliability features such as permanent magnet brushless DC motor-driven bike.MC33035 Typical control functions include open loop PWM speed control so that it can control (start or stop), reversing control and braking control. This chip is overcurrent protection, undervoltage protection, under current protection, and therefore chip cost, high intelligence, which simplifies the system structure, lower system costs, increase system performance to meet the needs of more applications.The design of the brushless DC motor controller is controlled by MC33035 chip to this design results show that, MC33035 typical time delay control with an optional latch-by-week shutdown mode current limiting characteristics, and internal thermal shutdown characteristics. Electric bicycles as a mode of transportation has caused a great impact on society and loved by the majority of users.KEY WORDS: electric-bicycle, brushless DC motor, MC33035, position sensors目录前言 (1)第1章电动自行车简介 (2)1.1 电动自行车的发展 (2)1.1.1 电动自行车的发展前景 (2)1.1.2 电动自行车的未来 (2)1.2 电动自行车的结构 (3)1.3 电动自行车的动力分析 (5)第2章电动自行车无刷电机原理分析 (7)2.1 电动自行车无刷直流电动机的发展 (7)2.2 无刷直流电机(BLDCM)的基本结构与工作原理 (7)2.2.1 无刷直流电机的工作原理 (8)2.2.2 无刷直流电机的基本结构 (10)2.3 直流无刷电机的控制原理 (11)第3章电动自行车控制器单元电路分析 (13)3.1 电动自行车控制器的功能 (13)3.2 无刷电机控制器单元电路分析 (14)3.2.1 无刷直流电机调速原理 (14)3.2.2 速度调速器的结构 (15)3.2.3 速度把 (17)3.3 限速电路 (20)3.4 刹车电路 (21)3.5防飞车电路 (23)3.6 巡航电路 (24)第4章无刷直流电机MC33035芯片及其工作原理 (25)4.1 MC33035芯片介绍 (25)4.2 MC33035芯片内部功能 (27)4.3 MC33035芯片的内部结构及工作原理 (29)4.3.1 MC33035芯片的内部结构及特点 (29)4.3.2 MC33035芯片的工作原理 (31)第5章基于MC33035芯片的电动自行车控制器电路 (33)5.1电动自行车控制器的研究及发展 (33)5.2 基于MC33035芯片的无刷控制器电路 (35)5.2 三相六步电机控制电路 (37)5.3 有刷电机控制电路 (39)结论 (42)谢辞 (43)参考文献 (44)外文资料翻译 (46)前言当交通拥堵、空气污染日益成为困扰现代都市的老大难问题时,电动自行车作为一种环保、便捷、健康的绿色交通工具应运而生。
我们应该以“无污染、能耗小”为目标研究更加适用于现代社会的高科技产品。
自八十年代至今,电动自行车行业由于其特殊性得到了飞速的发展,而且电力电子、微电子、计算机控制、电机等技术的迅速发展,又为电动自行车的开发研制提供了良好的条件。
新型特种自行车,因其无污染、低噪音、低能耗、占道少、方便快捷等特点而成为国际上流行和大力推广的绿色私人交通工具已经风靡全国。
近年在一片争议声中,电动车行业已迅猛发展、欣欣向荣,年增长率高达15%-20%,这已是有目共睹的事实。
据不完全统计,目前中国电动车行业生产制造领域,大量中小投资创业者集聚,生产厂商已超过1200家,配件厂商超过2300家,从业人员达100万以上,年产销量约为1250万辆,创造着每年200亿元以上的直接经济效益和难以估量的间接经济效益。
我国是举世公认的“自行车王国”,在相当长时期内,自行车仍将是老百姓出行最常用的交通工具。
近年来,出现了一种以磁无刷直流电动机为驱动的自行车作为代步工具的普遍现象。
第1章电动自行车简介1.1 电动自行车的发展1.1.1 电动自行车的发展前景从70年代起,我国电动车辆的研究开发便一直在进行,在1993年,电动车被确定为国家十大重点科技工程,并制定了电动汽车的发展目标。
与汽车相比,灵活方便的中短途个人交通工具,如自行车、助动车和摩托车等,在全球依然占据绝大多数。
全世界每天在役的自行车约为10亿辆,每年仍有1亿辆新自行车进入市场。
从八十年代至今,电动车的相关技术如电力电子、微电子、计算机控制、电机等技术的迅速发展为其开发研制提供了良好的条件。
以欧、美、日为代表的发达国家的科研机构、车辆公司在政府的支持下纷纷投巨资开始研制,并成功推出了一批性能良好的概念车。
预计未来3至4年内,电动自行车将成为欧洲自行车商下一阶段推出的主要产品,仅欧洲市场每年的销量就可在300万至400万辆。
欧盟委员会在欧洲10国赞助一项E-Tour 计划,推动电动车辆的发展,此计划以电动自行车为主。
通过将1300辆电动自行车发给大城市,以此刺激欧洲大城市环保交通工具的使用。
在美国,三大汽车集团公司通用(GM)、福特(FORD)、戴姆克莱斯勒(CHRYSER)成为美国开发与推广电动车的主力成员。
在日本,商品化的电动自行车由日本雅马哈公司率先于1994年推出,并随着本田、三洋、松下等知名公司的参与,生产规模日益扩大。
1.1.2 电动自行车的未来短短数年时间,在难以计数的“胆大冒险、嗅觉灵敏”的中小投资创业者的不懈努力下,诞生了一个新兴行业——中国电动自行车行业!未来似乎是无限美好的,但是这无限美好的背后,显然不能只看到眼前短暂的经济效益,更要找到一条行业发展的最佳路径,那么这条路径到底在哪里呢?让我们共同探讨!产品技术将不断创新:1. 无污染电动自行车是以蓄电池发出的电能作为驱动能源,以电动机作为动力,运行过程中没有废气排放因此和摩托车、燃油助动车相比,没有污染。
2. 低噪音、振动小:电动自行车是由电动机驱动的,电动机在运行中产生的噪音比较小,运行比较平稳。
而摩托车、燃油助动车是由燃油发动机驱动,其汽缸产生的噪音比较大,由于受到体积限制,其发电机的缸数较少,运行时不够平稳,振动较大。
3. 最高时速20公里,行驶安全:摩托车、燃油助动车的速度快,在机动车道上行驶,事故率较高而电动自行车,国家强制性规定(国标GB17761-1999)其速度不能超过20km/h,并且电动自行车一般不能在机动车道上行驶,因此相比之下安全很多。
4. 效率高:摩托车、燃油助动车的效率一般只有30%左右,而电动自行车的效率可以达到70%以上。
5. 结构简单、轻便,易维护、维修:电动自行车一般是有蓄电池、控制板、电机和车身组成;蓄电池用的是免维护的,电机的故障率较低,基本上不要维护,控制板由于现代的电力电子技术比较成熟,损坏率也比较低,另外电动自行车没有机械传动结构,无污染、体积小、重量轻,因此相比摩托车、燃油助动车来说,其日常的维护、维修量少得多。
电动自行车作为耐用消费品,技术是其产品的核心。
虽然现在电动自行车行业的厂家多如牛毛,产品琳琅满目,但仔细观察就会发现真正有技术含量、有卖点的产品是少之又少。
具有自主开发能力,重视技术创新的电动自行车企业更如凤毛麟角。
1.2 电动自行车的结构电动自行车由车体、电驱动装置(电机)、可充电电池、充电器和控制系统五大部分组成。
不同种类的车,其电池置放位置、控制器形式等有所不同。
1、车体:由于国家标准规定电动自行车的电驱动方式大体上有三类:(1) 摩擦传动式:由电机转轴上的靠轮直接加载于车轮胎,靠摩擦传动。
其优点是结构简单,成本低,但是轮胎磨损大,雨季容易打滑。
(2) 中轴驱动式:车架中轴处经特殊设计安放电机,通过减速机构带动中轴,再由中轴通过链条带动后轮。
其优点是电机重心合理,并能利用自行车减速系统换档,但机械损耗较大。