两相直流步进电机型号大全及参数
- 格式:pdf
- 大小:5.81 MB
- 文档页数:14
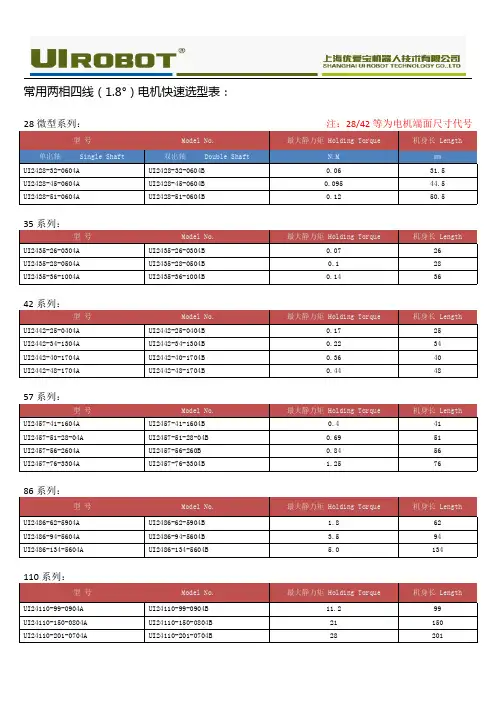
常用两相四线(1.8°)电机快速选型表:电机命名规则UI24XX—L—XX04(06)A(B)���○4○5○6○71.UIROBOT优爱宝步进马达2.两相四线马达3.马达的端面尺寸型号如:20/28/35/42/57/86/1104.马达长度如:39/47/565.相电流XX代表相电流为X.X A/相6.04代表引线数为4,06代表引线数为67.输出轴型式A:单出轴B:双出轴技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameterSpecificatio技术规格Technique机械尺寸Dimensions。
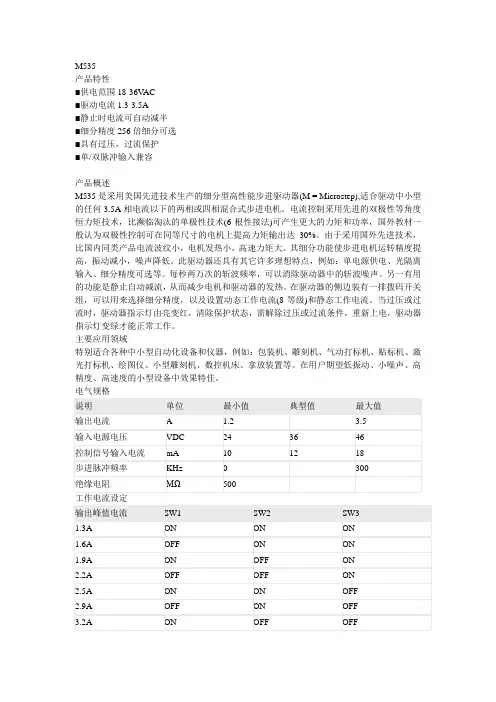
M535产品特性■供电范围18-36V AC■驱动电流1.3-3.5A■静止时电流可自动减半■细分精度256倍细分可选■具有过压,过流保护■单/双脉冲输入兼容产品概述M535是采用美国先进技术生产的细分型高性能步进驱动器(M = Microstep),适合驱动中小型的任何3.5A相电流以下的两相或四相混合式步进电机。
电流控制采用先进的双极性等角度恒力矩技术,比濒临淘汰的单极性技术(6根性接法)可产生更大的力矩和功率,国外教材一般认为双极性控制可在同等尺寸的电机上提高力矩输出达30%。
由于采用国外先进技术,比国内同类产品电流波纹小,电机发热小,高速力矩大。
其细分功能使步进电机运转精度提高,振动减小,噪声降低。
此驱动器还具有其它许多理想特点,例如:单电源供电、光隔离输入、细分精度可选等。
每秒两万次的斩波频率,可以消除驱动器中的斩波噪声。
另一有用的功能是静止自动减流,从而减少电机和驱动器的发热。
在驱动器的侧边装有一排拨码开关组,可以用来选择细分精度,以及设置动态工作电流(8等级)和静态工作电流。
当过压或过流时,驱动器指示灯由亮变红,清除保护状态,需解除过压或过流条件,重新上电,驱动器指示灯变绿才能正常工作。
主要应用领域特别适合各种中小型自动化设备和仪器,例如:包装机、雕刻机、气动打标机、贴标机、激光打标机、绘图仪、小型雕刻机、数控机床、拿放装置等。
在用户期望低振动、小噪声、高精度、高速度的小型设备中效果特佳。
电气规格工作电流设定微步细分设定接口信号描述典型接线图安装尺寸四、接线信号功能详解七、机械安装尺寸(132×76×45mm)十、细分和电流设定M535驱动器采用八位拨码开关设定细分精度、动态电流和半流/全流。
详细描述如下:动态电流细分精度半流/全流细分设定细分精度由5、6、7、8四位开关设定。
电流设定1—3位拨码开关用于设定电机运动时电流(动态电流),而第4位拨码开关用于设定静止时电流(静态电流)。
步进电机的选用电机型号、参数、尺寸标准步进电机的选用步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
论文天地欢迎您选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ) (1-1)式中φ ---步进电机的步距角(o/脉冲)S ---丝杆螺距(mm)Δ---(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2)式中Jt ---折算至电机轴上的惯量(Kg.cm.s2)J1、J2 ---齿轮惯量(Kg.cm.s2)Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N)S ---丝杆螺距(cm)(3)计算电机输出的总力矩MM=Ma+Mf+Mt (1-3)Ma=(Jm+Jt).n/T×1.02×10ˉ2(1-4)式中Ma ---电机启动加速力矩(N.m)Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2)---电机所需达到的转速(r/min) nT---电机升速时间(s)Mf=(u.W.s)/(2πηi)×10ˉ2(1-5)Mf---导轨摩擦折算至电机的转矩(N.m)u---摩擦系数η---传递效率Mt=(Pt.s)/(2πηi)×10ˉ2(1-6)Mt---切削力折算至电机力矩(N.m)Pt---最大切削力(N)(4)负载起动频率估算。
步进电机型号及参数大全步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。
步进电机的分类可变磁阻式(VR型):转子以软铁加工成齿状,当定子线圈不加激磁电压时,保持转矩为零,故其转子惯性小、响应性佳,但其容许负荷惯性并不大。
其步进角通常为15°永久磁铁式(PM型):转子由永久磁铁构成,其磁化方向为辐向磁化,无激磁时有保持转矩。
依转子材质区分,其步进角有45°、90°及7.5°、11.25°、15°、18°等几种。
混和式(HB型):转子由轴向磁化的磁铁制成,磁极做成复极的形式,其乃兼采可变磁阻式步进电机及永久磁铁式步进电机的优点,精确度高、转矩大、步进角度小。
步进电机型号1、步进电机到底有多少型号?答:28.42.57.86.110.130.2、这些数字是代表电机尺寸大小吗?答:这些型号根据电机的底座的直径来命名的。
3、除了BYG还有哪些英文型号,分别代表什么意思?答:现在用的比较多的都是混合式步进电机了。
而且现在这种东西已经国产化了。
各个厂家的命名又有所不同。
所以不能给你提供更好的解释。
步进电机的基本参数1、电机固有步距角。
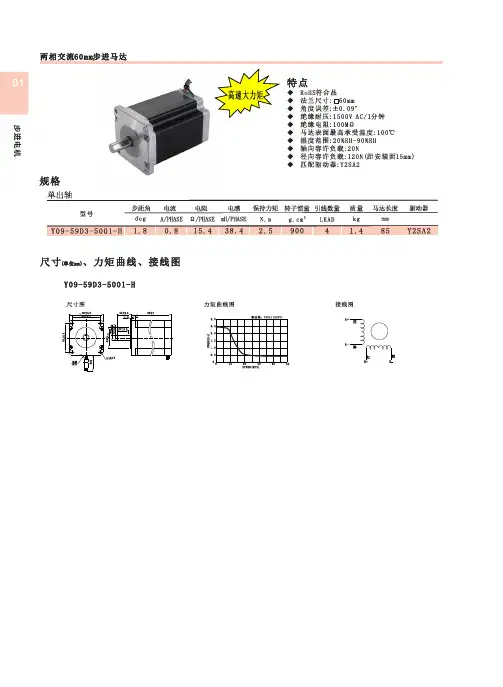
特点◆ 径向容许负载:90N(距安装面15mm)◆ RoHS 符合品◆ 安装孔距:47.14mm◆ 绝缘电阻:100MΩ◆ 匹配驱动器:Y2SD2◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH◆ 绝缘耐压:500V AC /1分钟◆ 角度误差:±0.09°◆ 轴向容许负载:20N◆ 法兰尺寸:□60mm规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-棕橙红黄01020304000.20.40.60.81.01.2SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2标配连接线:长度300min力矩曲线0510152000.51.01.52.02.53.0SPEED(RPS)T O R Q U E (N .m )2524V 36V 48V 驱动器:Y2SD2接线图010********.30.60.91.21.51.8SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2Y09-59D3-1305-PY09-59D3-3305-P Y09-59D3-5001-P0.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)24V 24V 24V 48V 48V 48V 60V 60V 60V 驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)◆ 绝缘耐压:1500V AC /1分钟特点◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 轴向容许负载:60N◆ 径向容许负载:320N(距安装面20mm)◆ 湿度范围:20%RH-90%RH◆ RoHS 符合品◆ 匹配驱动器:Y2SD3 or Y2SA2◆ 法兰尺寸:□86mm◆ 角度误差:±0.09°规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器力矩曲线000555101010151515202020000T T T O O O R R R Q Q Q U U U E E E (((N N N ...m m m )))252525并联直流驱动型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm2g.cm 驱动器串联交流驱动Y09-59D3-7430-PY09-59D3-7536-P Y09-59D3-7655-P102030400.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)50驱动器:Y2SA2(220VAC,串联3A)驱动器:Y2SA2(220VAC ,串联3A)驱动器:Y2SA2(220VAC ,串联3A)00055101015152020000T T T OO O RR R QQ Q U U U EE E (((NN N ...mm m )))2525接线图A+A-A+A-B+B-黑绿红蓝黄橙白棕并联接线串联接线Y09-59D3-7430-P Y09-59D3-7536-P Y09-59D3-7655-P。

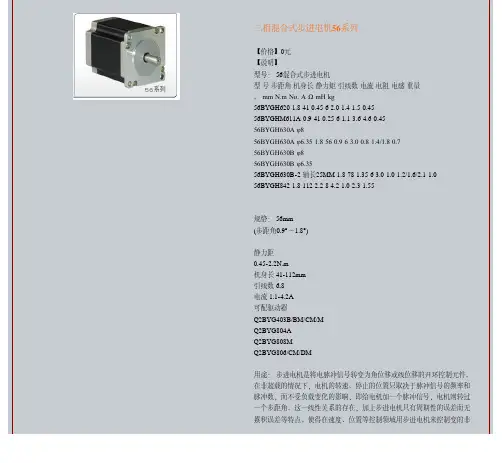
二相混合式步进电机56系列【价格】0元【说明】型号: 56混合式步进电机型号步距角机身长静力矩引线数电流电阻电感重量。
mm N.m No. A Ω mH kg56BYGH620 1.8 41 0.45 6 2.0 1.4 1.5 0.4556BYGHM611A 0.9 41 0.25 6 1.1 3.6 4.6 0.4556BYGH630A φ856BYGH630A φ6.35 1.8 56 0.9 6 3.0 0.8 1.4/1.8 0.756BYGH630B φ856BYGH630B φ6.3556BYGH630B-2 轴长25MM 1.8 78 1.35 6 3.0 1.0 1.2/1.6/2.1 1.056BYGH842 1.8 112 2.2 8 4.2 1.0 2.3 1.55规格: 56mm(步距角0.9°~1.8°)静力距0.45-2.2N.m机身长 41-112mm引线数 6,8电流 1.1-4.2A可配驱动器Q2BYG403B/BM/CM/MQ2BYG804AQ2BYG808MQ2BYG806/CM/DM用途:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
◆ 湿度范围:20%RH-90%RH特点◆ RoHS 符合品◆ 绝缘耐压:500V AC /1分钟◆ 马达表面最高承受温度:100℃◆ 轴向容许负载:20N◆ 径向容许负载:90N(距安装面15mm)◆ 匹配驱动器:Y2SD2◆ 绝缘电阻:100MΩ◆ 法兰尺寸:□60mm◆ 安装孔距:47.14mm◆ 角度误差:±0.09°规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-棕橙红黄01020304000.20.40.60.81.01.2SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2标配连接线:长度300min力矩曲线0510152000.51.01.52.02.53.0SPEED(RPS)T O R Q U E (N .m )2524V 36V 48V 驱动器:Y2SD2接线图010********.30.60.91.21.51.8SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2Y09-59D3-1305-PY09-59D3-3305-P Y09-59D3-5001-P0.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)24V 24V 24V 48V 48V 48V 60V 60V 60V 驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)◆ 湿度范围:20%RH-90%RH◆ 绝缘耐压:1500V AC /1分钟◆ RoHS 符合品◆ 法兰尺寸:□86mm◆ 马达表面最高承受温度:100℃◆ 轴向容许负载:60N特点◆ 角度误差:±0.09°◆ 绝缘电阻:100MΩ◆ 径向容许负载:320N(距安装面20mm)◆ 匹配驱动器:Y2SD3 or Y2SA2规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器力矩曲线000555101010151515202020000T T T O O O R R R Q Q Q U U U E E E (((N N N ...m m m )))252525并联直流驱动型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm2g.cm 驱动器串联交流驱动Y09-59D3-7430-PY09-59D3-7536-P Y09-59D3-7655-P102030400.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)50驱动器:Y2SA2(220VAC,串联3A)驱动器:Y2SA2(220VAC ,串联3A)驱动器:Y2SA2(220VAC ,串联3A)00055101015152020000T T T OO O RR R QQ Q U U U EE E (((NN N ...mm m )))2525接线图A+A-A+A-B+B-黑绿红蓝黄橙白棕并联接线串联接线Y09-59D3-7430-P Y09-59D3-7536-P Y09-59D3-7655-P。