台达20pm运动功能块
- 格式:pdf
- 大小:2.17 MB
- 文档页数:170

(数控加工)台达PM数控功能的应用台达20PM数控功能的应用摘要:本文简述台达DVP20PM运动控制型PLC的数控功能,及结合HMI在数控应用中的方法及特点。
具体包括主要四种输入G码的方法关键词:PLC运动控制逻辑控制数控系统G码1引言随着自动化设备对控制的高精度、高响应性需求的不断增加,自动化控制技术不断提高,精确的高速定位控制得到广泛应用,PLC这一工业控制产品也从早期的逻辑控制领域不断扩展到数控控制领域,实现了以往PLC无法完成的运动控制功能。
在运动控制中大多数采用我们熟悉的数控系统或者是计算机运动板卡来完成,虽然作为专门的产品能够实现复杂的运动轨迹控制,但同时要完成一些逻辑动作的控制就不如PLC灵活方便。
台达DVP20PM系列PLC是具有高速定位、双轴或叁轴线性及圆弧插补多功能的可编程控制器,结合了PLC逻辑动作控制和数控系统运动控制的各自优点,在功能上满足双轴或三轴插补的高速定位需求。
2数控功能应用介绍。
目前,在我们用DVP20DPM做过的数控案例中主要有液晶切片机,双轴立车,焊接轨迹控制,点胶轨迹控制,龙门数控钻床等等。
在这些应用中,都用到了数控系统的G码和M码指令。
目前20PM包括两款产品分别为20PM00D,与20PM00M.20PM00D支持的G代码功能如下:G0高速定位;G1双轴联动直线插补;G2顺时针圆弧插X3.1DVP20PM程序结构由于20PM主机结合了PLC顺序逻辑控制及双轴插补定位控制的功能,因此在程序架构上主要分为O100主程序、Ox运动子程序及Pn子程序等三大类,结合了基本指令、应用指令、运动指令及GCode指令,使程序设计更多元化,结构更清晰;程序采用PMSOFT软件进行编辑,参见图4。
图4程序设计界面(1)主程序。
主程序以O100作为起始标记,M102作为结束标记,是PLC顺序控制程序,主要为控制主机动作执行,在O100主程序区域中,可以使用基本指令及应用指令,或在程序中启动Ox0~Ox99运动子程序及调用Pn子程序。

台达运动控制应用例目录第1章单轴运动.........................................................................1-11.1原点回归模式...................................................................1-11.2自行规划多段变速度...........................................................1-81.3台达ASDA伺服简单定位展示系统........................................1-161.4手摇轮跟随模式(一)......................................................1-231.5手摇轮跟随模式(二)......................................................1-291.6手摇轮跟随模式(三)......................................................1-35第2章电子凸轮.........................................................................2-12.1电子凸轮(一)–周期性单轴凸轮...........................................2-12.2电子凸轮(二)-非周期性单轴凸轮.......................................2-122.3电子凸轮(三)-多轴凸轮.....................................................2-252.4绕线机应用....................................................................2-322.5电子凸轮应用–旋切控制....................................................2-412.6电子凸轮应用–追剪控制(Fly saw)......................................2-53第3章G-Code应用...................................................................3-13.1G–Code应用-三轴同动绘出Delta LOGO...............................3-13.2M Code应用...................................................................3-63.3GNC载应用-使用PMSoft汇入G-Code.................................3-103.4GNC应用-PMGDL软件下载(一般模式)..............................3-143.5GNC应用-PMGDL软件下载(DNC模式).............................3-223.6GNC应用-使用D Register转G码 ASCII格式下载..................3-283.7GNC应用-使用HMI配方方式透过 USB Disk下载...................3-383.8点胶模式.......................................................................3-49第4章其它应用.........................................................................4-14.1中断应用.........................................................................4-14.2计数器应用......................................................................4-64.3定时器应用....................................................................4-134.4以20PM作为从机应用.....................................................4-16i4.5PWM应用-水闸门控制程序................................................4-194.6高速比较应用.................................................................4-224.7高速捕捉应用.................................................................4-284.8制袋机应用-单段速外部触发模式........................................4-334.9PID应用......................................................................4-38 ii目录1.1 原点回归模式1.2 自行规划多段变速度1.3 台达ASDA伺服简单定位展示系统1.4 手摇轮跟随模式(一)1.5 手摇轮跟随模式(二)1.6 手摇轮跟随模式(三)1-1第1章 单轴运动1-1 1.1 原点回归模式20PM 位置控制与伺服驱动系统系统架构图【范例说明】1. 启动原点回归模式时,不同的启动位置其行走的路径也不同,以原点回归方向正转为例,其行走路径如下图所示:2. 20PM 的原点回归模式的设定参数D1816+80*N( N=0~2 )如以下所示:原点回归方向:原点回归方向可分为正转和反转。
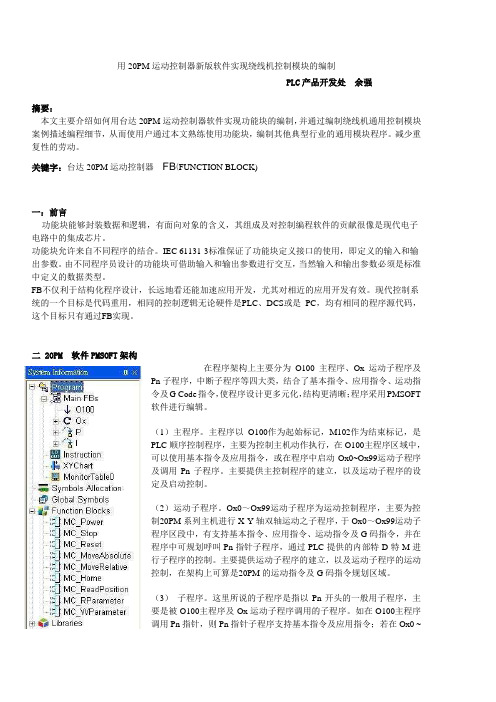
用20PM运动控制器新版软件实现绕线机控制模块的编制PLC产品开发处余强摘要:本文主要介绍如何用台达20PM运动控制器软件实现功能块的编制,并通过编制绕线机通用控制模块案例描述编程细节,从而使用户通过本文熟练使用功能块,编制其他典型行业的通用模块程序。
减少重复性的劳动。
关键字:台达20PM运动控制器FB(FUNCTION BLOCK)一:前言功能块能够封装数据和逻辑,有面向对象的含义,其组成及对控制编程软件的贡献很像是现代电子电路中的集成芯片。
功能块允许来自不同程序的结合。
IEC 61131-3标准保证了功能块定义接口的使用,即定义的输入和输出参数。
由不同程序员设计的功能块可借助输入和输出参数进行交互,当然输入和输出参数必须是标准中定义的数据类型。
FB不仅利于结构化程序设计,长远地看还能加速应用开发,尤其对相近的应用开发有效。
现代控制系统的一个目标是代码重用,相同的控制逻辑无论硬件是PLC、DCS或是PC,均有相同的程序源代码,这个目标只有通过FB实现。
二 20PM 软件PMSOFT架构在程序架构上主要分为O100主程序、Ox运动子程序及Pn子程序,中断子程序等四大类,结合了基本指令、应用指令、运动指令及G Code指令,使程序设计更多元化,结构更清晰;程序采用PMSOFT软件进行编辑。
(1)主程序。
主程序以O100作为起始标记,M102作为结束标记,是PLC顺序控制程序,主要为控制主机动作执行,在O100主程序区域中,可以使用基本指令及应用指令,或在程序中启动Ox0~Ox99运动子程序及调用Pn子程序。
主要提供主控制程序的建立,以及运动子程序的设定及启动控制。
(2)运动子程序。
Ox0~Ox99运动子程序为运动控制程序,主要为控制20PM系列主机进行X-Y轴双轴运动之子程序,于Ox0~Ox99运动子程序区段中,有支持基本指令、应用指令、运动指令及G码指令,并在程序中可规划呼叫Pn指针子程序,通过PLC提供的内部特D特M进行子程序的控制。

20PM00D和DVP01PU-H2在點膠機上的應用摘要:臺達DVP20PM00产品是一款同时具有逻辑控制和位置控制的功能强大的PLC,可以灵活、高速、精确的完成平面两轴及三轴运动控制,可廣泛運用到點膠機相關設備。
關鍵字:點膠機;臺達20PM;01PU;目前在上海松江某電子設備廠使用臺達20PM00D、01PU-H2、DOP-B07S200(人機界面)、步進電機、步進驅動器、皮帶組合來完成3軸控制功能。
點膠機功能特點:1.2-3自由度空間軌跡運動。
2. 直觀方便的圖形操作界面。
3. 點膠過程中速度和軌跡可以調整。
4. 點膠精度高,軌跡均勻, 出膠穩定,效率高。
5. 編輯和教導式錄入軌跡參數,操作簡單方便。
6. 采用教導踩點的方式產生加工文件,可進行單步調試。
7. 單步或自動加工方式。
8. 采用配方格式保存加工文件,方便通過電腦修改。
9. 可保存多組點膠工藝。
10. 采用軟件插補,可實現快速直線、圓弧插補及各類復雜軌跡運動。
11. 可在任意點設置進槍、退槍、開槍、關槍等操作。
20PM00D控制两轴構成X/Y坐標系統,采用G碼完成直线或圆弧插补完成轨迹运动,定位點膠位置,另外01PU控制一轴Z軸为独立运动,控制点胶槍,实现了设备的点动、原点回归、半自动及自动运行,并且通过配方功能实现了轨迹形状任意。
用戶可以在人機界面上設定點膠做動作,外部有一個急停按鈕。
點膠機示意圖選型注意事項:步進電機的驅動力和步進驅動器的細分度、接受脈沖的方式。
步進電機啟動器的細分度能提高精度。
20PM是差動脈沖輸出,所以對應的步進驅動器也要選擇差動脈沖輸入的型號。
我們選擇步進啟動器細分度為200,步進電機40000個脈沖1轉達到要求的精度。
需要了解步進電機轉1圈皮帶直線前進多少距離,還有皮帶運動的正反方向。
導軌上需要安裝左、右極限開關和原點回歸的近點信號開關,這些信號對應的要接到20PM和01PU相應的端子。
然后做最小步進試驗,發出10個脈沖檢測到2條(0.002毫米)的動作,這就是最小誤差。

基于台达20PM运动控制器的线缆裁切机摘要:本文主要介绍台达20PM运动控制器在线缆裁切设备中的应用,并阐述了设备的工作原理、工艺要求及飞剪功能的应用概要。
1 引言传统的线缆裁切机跟随误差比较大,为了解决这个问题,利用台达20PM运动控制器的内置飞剪功能出色完成了各项需求,实现输送和裁切线速度同步,通过调整速度同步区的宽度来完成不同长度线缆的裁切,保证了裁切的精准度。
2 结构及工作原理2.1 电缆切割机电缆切割机设备结构如图1、图2所示。
线缆裁切设备这是比较典型的飞剪功能应用,台达20PM已内置飞剪功能,可采用以DVP-20PM为控制核心的台达机电产品整体解决方案完成对切刀控制,实现设备控制要求。
2.2 DVP20PM运动控制器台达DVP-20PM00D是一款具有运动控制专用功能的可编程控制器。
DVP-20PM00D的最大特点是PLC主机直接提供电子凸轮CAM功能,或者说DVP-20PM00D是内置CAM功能的PLC,所以有些场所直接称呼DVP-20PM00D为台达20PM运动控制器。
20PM具有2路500KHz的输入与输出,在CAM功能中定义X轴为从轴,编码器输入轴为主轴,当定义好CAM Table后,从轴依据定义的曲线跟随主轴运动。
采用高速双CPU结构形式,利用独立CPU处理运动控制算法,可以很好地实现各种运动轨迹控制、逻辑动作控制,直线/圆弧插补控制等,电缆切割机正是利用了20PM运动控制器的电子凸轮功能很好的解决了上述高速切割时出现的不等长等问题。
20PM的主要特点:(1)20PM适用于高速、高精度、高复杂的运动控制场合;(2)多段速执行及中断定位;(3)64K 大容量, 内置Flash存储体;(5)两组差分脉冲输出,最高脉冲输出达500KHz;(6)两组手摇轮控制;(7)内置电子凸轮CAM功能,轻松实现绕线、飞剪、追剪等应用;(8)支持PLC顺序逻辑控制及NC控制(G 码与M码)。
3 切割机软件设计3.1 I/O定义X0计数光电X1裁刀启动X2裁刀停止X3护保护X4直流马达引起故障X5伺服故障X6主控箱急停OITPUTY0伺服onY1故障复位Y2裁切启动Y3推线Y4蜂鸣Y5裁切指示灯3.2 飞剪程序设计过程在利用20Pm飞剪功能写程序的时候需要按照以下步骤来进行:程序中需要计算填充数据D100-D112,其参数定义如下:D101..D100主轴长度D103..D102从轴长度D105..D104从轴同步长度D107..D106从轴同步倍率(F2/F1)D109..D108从轴最高倍率限制D110加速曲线:0 const speed,1 const Acc,2 SingleHypot,3 Cycloid)D111CAM曲线=00 leftCAM,1 midCAMall,2 midCAMbegin,3 midCAMend)程序中填充数据D100-D112其参数计算过程如下:(1)D100计算:D210裁切长度D222计米轮周长D212计米轮线数D224实际计米轮总脉冲数D226裁切长度脉冲数D100=D226=D224=D210/D222*D212(2)D102计算:D416切刀轮脉冲x D426速比= D200切刀轮脉冲=(D102)(3)D104计算:D200切刀轮脉冲x D172同步范围= D204同步脉冲=(D104)(4)D106倍率计算推导过程:a. 主轴直径D1 (mm)主轴一圈脉波数R1 (Pulses/Rev)主轴速度F1(Hz)主轴速度V1(mm/sec)b. 从轴直径D2 (mm)从轴一圈脉波数R2 (Pulses/Rev)从轴速度F2(Hz)从轴速度V2(mm/sec)c:根据同步时线速度相同即V1=V2(F1*3.14*D1/R1) =(F2*3.14*D2/R2)F2/F1 = (D1*R2*K减速比)/(D2*R1)= (D250*D256*D258减速比)/( D252*D254)=D274=D106脉冲比同步倍率(5)D108倍率上限(6)D110加速曲线选择:0-3曲线选择逐级平滑(7)D111CAM曲线选择:选择0保证了切刀切完后回到上位零点等待8:D112结果ok以上部分完成了D100-D112的计算填充数据过程,也就是完成了飞剪程序部分设计,3.3 飞剪程序运行监控D1799设定X 轴输入端子极性端子极性PG0D1800输入点状态b5DOG原点信号来计数点D50LDPm125无效D1816=530原点回归DOG 下降沿检测原点回归方向A/B 相脉冲D1828 X轴原点回归速度D1830 X轴原点回归减速速度D1832 X轴零点信号数ND1833回原点后X轴补充距离P k0D1838X轴目标位置(I) P(I) (Low word)D1848X轴现在位置CP(PLS) (Low word)D1864=H305 X轴手摇轮输入响应速度设定A/B相脉波4倍频D1846=100 X单段速定位运动模式启动D1846=40原点回归模式启动D1846=2000插入单段速定位运动模式启动经过上面的分析将分析过程写成程序即完成了主体程序设计,其它各种安全保护和附加功能同WPL程序编写就不一一赘述。
台达PLC各系列的功能说明台达PLC主要包括:E系列主机;S系列主机;新增主机PM主机和SV主机。
一,E系列主机包括:EX;ES;EH21,EH2系列:优异的运算功能,内置庞大的程序与资料存储空间,支持超过200个应用指令,新增2轴直线/圆弧插补运动控制功能,并可搭配多样化的高速特殊扩充模块与功能卡,可满足各式各样要求及时反应的应用.1)主机点数:16/20/32/40/48/64/80 2)最大I/O点数:512点3)内存容量:16K Steps 4)运算执行速度:0.24us(基本指令)5)通讯接口:内置RS-232与RS-485,相容MODBUS ASCII/RTU通讯协议,可扩充第3个通讯端口(弹性扩展功能卡;型号:DVP-F232S和DVP-F485S。
6)资料存储器:10,000字节 7)档案存储器: 10,000字节该系列应用:1):200khz高速计数器和内置独立200khz脉冲输出功能(提供伺服定位指令)。
PLC机型:DVP20EH00T和DVP32EH00T;DVP40EH00R2/T220/32点主机支持2点200khz(Y0,Y2);40点主机支持2组AB相200khz脉冲输出(Y0,Y1)(Y2,Y3)和2点200khz脉冲输出(Y4,Y6)。
2):可连接8台模拟,温度,定位,计数器等扩展模块PID,PLC Easy Link(32站),有187条应用指令。
3):该系列支持数字,模拟,通讯,内存功能卡与资料设定器等功能。
4):内置4组硬件高速计数器,1):1相1:组数(6)频宽(10Khz)(一般型)2):1相1:组数(2/2)频宽(200khz/20Khz)3):1相2:组数(2/2)频宽(200khz/20Khz)4):2相2:组数(2/2)频宽(200khz/20Khz)5):优异的运算能力:CPU+ASIC双处理器,支持浮点运算。
6):直线/圆弧补间运动功能支持最新开发的直线/圆弧插补运动控制指令,搭配高速脉冲输出功能,可以轻易达到两轴同时动作的控制要求。
台达运动控制器20Pm在厚料裁切上的应用摘要:本文主要介绍台达20PM运动控制器在厚料旋切行业的应用,厚料裁切行业包括钢板裁切,肥皂裁切,厚木板裁切等,与普通旋切有着很大不同的是,主要在于切刀从切入物料,到切断物料,有个过程,在这过程中速度同步区的曲线比率不是一定值,是不断变化的,为了解决这个问题,利用台达20PM内置厚料飞剪功能出色完成了各项需求,实现输送和裁切速度同步,并就切皂机设备阐述了厚料裁切的工作原理、工艺要求及厚料飞剪功能的应用概要。
关键字:台达20PM运动控制器凸轮功能厚料飞剪速度补偿CAM曲线一:前言傳統的裁切系統,都是在材料開始加工之前先由送料馬達將材料送出指定的長度,等材料穩定停止之後,隨後再進行正常的加工作業。
因此基本上,只要送料的長度準確,不論其為何種加工作業,產出成品的質量都可以被客戶接受,而且,静止下来切,无论材料厚薄,效果都很好。
但是,碰到如斜紋紙管生產線、無縫鋼管生產線、石膏板切割生产线、钢筋矫直切割生产线,钢板飞剪…等等,材料是連續不間斷地生產出來的,根本無法採用停止後靜態裁切的方式。
以及客户需要提高生产效率的情况下,同步式剪切系统就比较适用。
本文介绍的厚料旋切系统,是同步式剪切系统中的一种,其他还有追剪。
它们之间最大的区别是:追剪是往返运动,而飞剪是为同向运动。
对台达20PM运动控制器来说主要是电子凸轮的CAM曲线不同。
同样是旋切,对应厚料和薄料旋切,其电子凸轮的CAM曲线也是不同。
下文介绍的主要是以肥皂旋切为案例,详述台达20PM运动控制器电子凸轮功能在厚料旋切系统的詳細应用。
二高速旋切肥皂机结构和原理1实际机械结构及外形Drive HMI如上图所示,左为一测米轮,右为切刀,侧米轮后带一2000线的编码器,,2,电气控制原理上图所示为电气控制原理,图中分为送料单元和剪切单元,送料单元通过20PM上的DA卡,给变频器一0--10v的信号控制送料速度,剪切单元由20PM,根据HMI设定的长度,以及编码器反馈的物料的速度和位置,控制剪切伺服动作,对肥皂进行定长裁切。
台达功能块的使用方法
台达功能块是台达PLC(可编程逻辑控制器)中的基本组成部分,用于实现各种控制逻辑和功能。
使用台达功能块需要按照以下步骤进行:
1. 选择合适的功能块类型,台达PLC提供了各种不同类型的功能块,如逻辑运算、计数器、定时器、数据处理等。
根据控制系统的需求,选择合适的功能块类型。
2. 配置功能块参数,在选择功能块类型后,需要配置功能块的参数,包括输入输出的地址、逻辑条件、计数器初始值、定时器时间等。
根据具体的控制逻辑要求,进行参数配置。
3. 编写功能块程序,在PLC编程软件中,根据选定的功能块类型和配置的参数,编写功能块程序。
程序可以采用类似于传统的逻辑图形式,也可以采用类似于编程语言的文本形式。
4. 调试和测试功能块程序,编写完功能块程序后,需要进行调试和测试,确保功能块的逻辑和功能符合预期要求。
可以通过PLC 仿真软件或者连接实际设备进行测试。
5. 部署功能块程序,经过测试无误后,将功能块程序部署到实际的PLC设备中,让其开始运行控制系统。
总的来说,使用台达功能块需要根据实际的控制需求选择合适的功能块类型,配置参数,编写程序,测试调试,最终部署到实际设备中。
这样才能实现对控制系统的精确控制和运行。