基于CAN总线的负荷监控系统的设计与开发
- 格式:pdf
- 大小:198.92 KB
- 文档页数:5

引言锅炉是通过燃烧加热工质来提供热能动力的重要设备,同时又是承压、受火、有爆炸危险而又被各行各业普遍使用的特殊设备。
所以实时监控锅炉的运行状态,及时、准确地发现锅炉运行中的事故至关重要。
传统的锅炉监控系统在测量手段和使用的传感器方面都存在很大的缺陷。
以温度检测为例,早期采用的热电偶电桥法,测试过程复杂;而采用集成的半导体模拟温度传感器需要大量的传输电缆,成本高且不易维护。
CAN总线是一种多主机控制标准,具有物理层和数据链路层的协议、多主节点、无损仲裁、高可靠性及扩充性能好等特点;能有效支持分布式控制系统的串行通信网络。
一方面,其通信方式灵活,可实现多主方式工作,还可实现点对点、点对多点等多种数据的收发;另一方面,能在相对较大的距离间进行较高位速率的数据通信。
本系统是由上位机对多个并列的承压锅炉监控单元进行控制管理,各监控单元之间要进行快速的数据传输。
CAN总线能很好地满足该系统的要求。
1 系统总体结构如图1所示,系统由上位监控机、CAN节点0与其他CAN节点组成。
其中,上位监控机为PC机,各CAN节点的微控制器为STC89LE54RD+。
STC89LE54RD+外接CAN控制器SJA1000,外部设备主要为一线式数字温度计DS1822与压力传感器。
上位监控机(PC机)采用IBM-PC兼容机,主要负责对系统各节点监控数据的接收与管理、控制命令的发送以及各控制单元动态参数和设备状态的实时显示。
CAN节点0是一个至关重要的节点,主要有两个功能:一是作为上位机(PC机)与CAN总线的接口,完成CAN总线数据与RS-232接口的数据转换,对智能节点传送过来的数据信息进行缓存,对告警信号进行告警以通知维护人员进行处理;二是负责协调上位机与各个CAN节点的通信,以确保各个节点的监控数据能够快速、准确地传给上位机。
监控CAN节点为智能型的监控模块,以单片机为核心,主要负责对现场的环境参数和设备状态进行监测,对采集来的数据进行打包处理并将处理过的数字信号通过CAN通信控制器SJA1000送入CAN总线;对系统中各个承压锅炉的压力与温度进行测量。
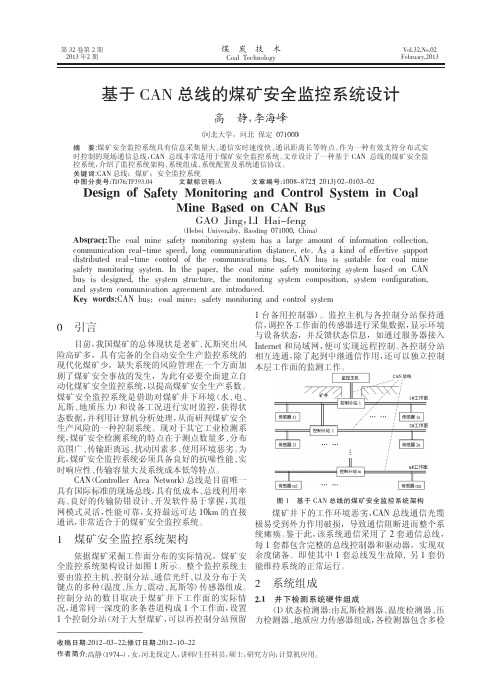
图1基于CAN 总线的煤矿安全监控系统架构收稿日期:2012-03-22;修订日期:2012-10-22作者简介:高静(1974-),女,河北保定人,讲师/主任科员,硕士,研究方向:计算机应用。
0引言目前,我国煤矿的总体现状是老矿、瓦斯突出风险高矿多,具有完备的全自动安全生产监控系统的现代化煤矿少,缺失系统的风险管理在一个方面加剧了煤矿安全事故的发生,为此有必要全面建立自动化煤矿安全监控系统,以提高煤矿安全生产系数。
煤矿安全监控系统是借助对煤矿井下环境(水、电、瓦斯、地质压力)和设备工况进行实时监控,获得状态数据,并利用计算机分析处理,从而研判煤矿安全生产风险的一种控制系统。
现对于其它工业检测系统,煤矿安全检测系统的特点在于测点数量多、分布范围广、传输距离远、扰动因素多、使用环境恶劣。
为此,煤矿安全监控系统必须具备良好的抗噪性能、实时响应性、传输容量大及系统成本低等特点。
CAN (Controller Area Network )总线是目前唯一具有国际标准的现场总线,具有低成本、总线利用率高、良好的传输防错设计、开发软件易于掌握,其组网模式灵活,性能可靠,支持最远可达10km 的直接通讯,非常适合于的煤矿安全监控系统。
1煤矿安全监控系统架构依据煤矿采掘工作面分布的实际情况,煤矿安全监控系统架构设计如图1所示。
整个监控系统主要由监控主机、控制分站、通信光纤、以及分布于关键点的多种(温度、压力、震动、瓦斯等)传感器组成。
控制分站的数目取决于煤矿井下工作面的实际情况,通常同一深度的多条巷道构成1个工作面,设置1个控制分站(对于大型煤矿,可以再控制分站预留1台备用控制器)。
监控主机与各控制分站保持通信,调控各工作面的传感器进行采集数据,显示环境与设备状态,并反馈状态信息,如通过服务器接入Internet 和局域网,便可实现远程控制。
各控制分站相互连通,除了起到中继通信作用,还可以独立控制本层工作面的监测工作。
基于CAN总线的火灾监控系统设计CAN总线作为一种国际标准,已被公认为几种最有前途的现场总线之一。
由于采用了许多新技术及独特的设计,CAN 总线与一般的通信总线相比,它的数据通信具有突出的可靠性、实时性和灵活性。
其特点可概括如下: CAN 是到目前为止惟一有国际标准的现场总线; CAN 为多主方式工作,网络上任一节点均可在任意时刻主动地向网络上其他节点发送信息,而不分主从;在报文标识符上,CAN 上的节点分成不同的优先级,可满足不同的实时要求,优先级高的数据最多可在 134 μs内得到传输;CAN 采用非破坏总线仲裁技术。
当多个节点同时向总线发送信息出现冲突时,优先级较低的节点会主动地退出发送,而最高优先级的节点可不受影响地继续传输数据,从而大大节省了总线冲突仲裁时间。
尤其是在网络负载很重的情况下,也不会出现网络瘫痪情况(以太网则可能);CAN 节点只需通过对报文的标识符滤波即可实现点对点、一点对多点及全局广播等几种方式传送接收数据;CAN 的直接通信距离最远可达 10 km(速率 5 kbps以下);通信速率最高可达 1 Mbps(此时通信距离最长为 40 m); CAN 上的节点数主要取决于总线驱动电路,目前可达 110 个。
在标准帧报文标识符有11 位,而在扩展帧的报文标识符(29 位)的个数几乎不受限制;报文采用短帧结构,传输时间短,受干扰概率低,保证了数据出错率极低; CAN 的每帧信息都有 CRC 校验及其他检错措施,具有极好的检错效果;CAN 的通信介质可为双绞线、同轴电缆或光纤,选择灵活; CAN 节点在错误严重的情况下具有自动关闭输出功能,以使总线上其他节点的操作不受影响; CAN 总线具有较高的性能价格比。
它结构简单,器件容易购置,每个节点的价格较低,而且开发技术容易掌握,能充分利用现有的单片机开发工具。
CAN 协议也是建立在国际标准组织的开放系统互联模型基础上的。
不过,其模型结构只有 3 层,即只取 OSI底层的物理层、数据链路层和应用层。

关键词:煤矿安全;CAN总线;dsPIC30F6012;监控系统引言煤矿安全监控系统能够对矿井下CH4、CO、温度、通风、粉尘等环境参数及机电设备的开关状态进行准确、实时的监测和报警,减少事故的发生,对煤矿安全生产具有非常重要的意义。
但是,煤矿井下环境十分恶劣,监测数据量大,监测点多且分散,采集的数据需要通过长距离通信线路上传,易受干扰影响,对监测系统的可靠性、实时性提出了严峻的考验。
CAN总线是一种应用于现场设备与控制室之间,支持分布式、实时控制的现场总线网络;采用双绞线传输、全分散、全数字化,抗干扰能力强,可构建多变量、多点检测的通信系统;可靠性高、实时性好,传输速率高,最高可达1Mb/s,最大传输距离为5km,完全满足煤矿安全监控的要求。
因此,本文设计了一种基于CAN总线的煤矿安全监控系统,现场智能节点以单片机dsPIC30F6012为检测控制核心,检测井下环境参数,并通过CAN总线实时、远距离上传至地面上位监控主机进行数据分析,全面实现井下安全生产监控。
1煤矿安全监控系统概述煤矿安全监控系统的总体结构如图1所示,由现场检测节点电路及测量传感器、CAN总线网络、CAN总线适配卡、上位机组成。
现场检测节点收集有害气体含量、温度等矿用传感器检测的环境数据,进行分析处理并就地显示及异常报警,同时通过CAN接口将数据实时发送到CAN总线上,也可通过CAN接口接收上位机下达的指令信息。
CAN总线可挂接110个检测节点,通过网桥方式可扩充节点数量,使监控不留死角。
上位PC机通过CAN适配卡获取由CAN总线传输的井下监测数据,并进行数据分析处理及存储,形成各种报表、异常报警及控制指令的下达。
2系统硬件设计(1)现场检测节点设计现场检测节点电路结构图如图2所示,节点以单片机dsPIC30F6012为核心,井下传感器输出的模拟信号送入dsPIC30F6012的片内A/D转换器,单片机以此获取井下环境参数信息,进行显示及与设定的限值进行比较,对异常情况进行报警;由单片机片内CAN总线控制器及高速光耦6N137、CAN总线收发器TJA1050T构成CAN 通信接口电路,用于数据的实时传输。
基于CAN总线的设备监控系统设计盘龙;林光春;任德均;邓霖杰【摘要】介绍了一种基于CAN总线的设备监控系统的设计方法,监控的对象是不同品牌的PLC。
系统由一个主站模块和30个分支节点模块组成,各模块均采用ARM Cortex-M3内核的STM32F107系列单片机,它拥有内置CAN控制器,能够高效的实现CAN总线通信。
此外,各节点模块还拥有多种通信接口,支持多种PLC通信协议。
%This paper presents a method to design a kind of equipment monitor and control system based on CAN bus. The system is consist of PLCs in different brands, one Master module and 30 Slaves, each of which has a STM32F107 MCU with Cortex-M3 core, containing an internal CAN bus controller that makes the CAN bus works efficiently. In addition,each module has multiple transmission interfaces and supports communication protocols of all the PLCs on line.【期刊名称】《机电工程技术》【年(卷),期】2014(000)003【总页数】3页(P50-52)【关键词】CAN总线;Cortex M3;PLC通信协议【作者】盘龙;林光春;任德均;邓霖杰【作者单位】四川大学制造科学与工程学院,四川成都 610065;四川大学制造科学与工程学院,四川成都 610065;四川大学制造科学与工程学院,四川成都610065;四川大学制造科学与工程学院,四川成都 610065【正文语种】中文【中图分类】TP273CAN总线可靠性高,并具有良好的错误检测能力,可用于实现远距离串行通信。
一种基于CAN总线的电气火灾监控系统的设计孙丁丁,王礼帅,齐辉中国矿业大学(北京)机电与信息工程学院信电系,北京(100083)E-mail:sunddcumt@摘要:本文在分析了电气火灾监控系统的功能要求的基础上,设计了一种使用高档A VR 单片机的电气火灾监控系统。
CAN 网络由于具有速率高、抗干扰能力强等优点在火灾报警系统中得到广泛应用。
提出了基于CAN 总线的火灾监控系统的拓扑结构,主要介绍了其关键部分监控设备的硬件设计原理, 以及软件流程。
关键词: CAN 总线;电气火灾监控系统;ATMEGA1281. 引言随着新技术的不断发展, 对火灾报警控制器联网的要求也越来越高[1]。
火灾报警控制器不但要完成本机的报警、联动等功能, 还要把报警信息传送到其他报警控制器或显示系统中。
这就对其控制系统的通信能力, 尤其是可靠性和实时性提出了更高的要求。
RS485 总线是火灾报警系统中最早应用的一种总线, 但其传输速率较低, 抗干扰能力差, 对火灾报警及显示的响应速度慢。
于是基金会现场总线( FF) 、LonWorks、CAN 等多种新的总线方式应运而生。
2. 电气火灾监控设备总体方案设计根据电气火灾监控系统的基本功能,可以把电气火灾监控设备所要完成的任务概括如下:1)采用CANBus通讯方式,实现无主从方式的网络架构设计;2)应具有黑匣子功能,能存储10000条数据;3)能进行全中文的报警及操作提示;4)能打印漏电、故障及温度超限等信息;5)应具备时钟功能,能对漏电、故障及温度超限等发生时刻进行记录;6)具备声光报警功能;7)具有消防联动功能。
3. 电气火灾监控设备硬件设计根据总体方案设计的要求和特点,参考国内外同类系统的设计,吸取他们的优点,按照功能齐全、成本低廉、易于实现、便于生产、安全可靠的设计思想,对电气火灾监控设备进行了设计。
按照功能独立、易于维护的原则,所设计的电气火灾监控设备主要可分为CAN通信单元、人机接口单元、中央处理单元三部分。