无人机载多光谱相机设计
- 格式:pdf
- 大小:355.16 KB
- 文档页数:4
多光谱遥感相机光学系统设计多光谱遥感相机光学系统设计是指将多个波段的光能量收集和传输到受控的传感器上,以实现多光谱遥感应用的过程。
此外,该系统还要具备抗像差、抗偏心、抗色散、抗衰减等特性。
1. 光学系统选材在多光谱遥感相机光学系统设计中,如何选择合适的光学元件构成系统的决策,不仅与需要采集的波段有关,也与衍射极限和元件的物理特性有关。
一般情况下,选择的光学元件应具有良好的衍射极限,并且质量要求高,以保证系统的效率高、性能稳定。
2. 系统布局多光谱遥感相机光学系统设计的关键就是系统的布局。
一般来说,系统的布局包括前端的多光谱选择器、主端的焦距控制器以及后端的传感器,可以根据实际应用需求来设计。
(1) 多光谱选择器:多光谱选择器的作用是将被采集的多个波段的光谱能量分离开来,并将其传输到主端焦距控制器上。
多光谱选择器的选择原则是确保分离出来的多个波段的光谱能量比例准确,同时能够有效的抑制相互色散,保证系统的图像质量。
(2) 主端焦距控制器:主端焦距控制器的作用是将多光谱选择器的分离的多个光谱能量汇集,并将其传输到后端传感器上。
为了保证所有波段的能量汇集到同一焦点上,主端焦距控制器应该具备抗像差、抗偏心、抗色散等特性。
(3) 后端传感器:后端传感器的作用是将多个波段的光能量转换成数字信号,以用于数据处理和分析。
后端传感器的选择也应该考虑其机械特性,以实现对光能量的有效捕捉和传输。
3. 系统光学设计多光谱遥感相机光学系统设计的关键在于系统的光学设计,即确定系统中光学元件的位置、尺寸和材料,使其能够实现最佳的性能。
(1) 光学元件的位置:在多光谱遥感相机光学系统设计的过程中,光学元件的位置是非常重要的,它决定了系统的功能性和可靠性。
一般来说,光学元件的位置应该根据系统的功能要求,以及光学元件之间的相互影响,来确定。
(2) 光学元件的尺寸:光学元件的尺寸是非常重要的,它不仅影响系统的光学性能,而且还影响系统的重量、体积和成本。

多光谱无人机影像波段合成
首先,多光谱无人机影像是通过无人机搭载的多光谱相机或传
感器获取的,它可以同时捕捉到不同波长的光谱信息。
常见的波段
包括可见光、红外线和近红外线等。
每个波段对应不同的光谱特征,可以用来反映地物的不同属性,如植被健康状况、土壤湿度、水质等。
在波段合成过程中,首先需要对采集到的多光谱影像进行预处理。
这包括去除噪声、辐射校正、大气校正等,以确保数据的准确
性和可比性。
接下来,根据具体应用需求选择合适的波段组合方式。
常见的波段组合方法包括主成分分析(PCA)、最大似然分类(MLC)和彩色合成等。
通过波段合成,可以获得更丰富的地物信息。
例如,在农业领域,通过合成红外线和绿光波段可以评估植被的健康状况和生长情况;在环境监测中,可以通过合成不同波段来分析水体污染程度和
土壤质量等。
波段合成还可以用于地物分类和目标检测等应用,通
过提取不同波段的特征来实现对地物的自动识别和分析。
此外,波段合成还可以与其他遥感数据进行结合,如高分辨率
影像、地理信息系统数据等。
通过融合多源数据,可以进一步提高数据的精度和应用的效果。
总结起来,多光谱无人机影像波段合成是一种利用无人机获取的多光谱影像数据进行波段组合和合成的方法。
它可以提供更丰富的地物信息,用于农业、环境监测、地质勘探等领域。
在实际应用中,需要根据具体需求选择合适的波段组合方式,并结合其他遥感数据进行综合分析和应用。

MCC4-12F型四波段CCD相机系统MCC4-12F型四波段CCD相机系统由中国科学院遥感应用研究所及北京国遥万维信息技术有限公司联合研发,是我国首部可在民用无人小飞机上搭载的四波段CCD相机。
其经无人机或其他小型航空器搭载,可充分发挥无人机机动灵活、受天气影响小、高位作业、应急性高等特点,其通过四个可更换的虑广窗口,可获取多达数十个波段的多光谱数据,可获得水体、水汽、测大气、气溶胶参数,在水文环保调查、大气监测等领域,可提供比遥感卫星、大飞机遥感更机动、更及时、更方便、更高分辨率的光谱影像,弥补了我国低空无人机搭载多光谱相机系统的空白。
以下为相机简介:一.相机传感器2/3” Sony ICX285 AL/AQ 像元尺寸(um) 6.45×6.45有效分辨率 1392×1040(pixels)fps(4帧一个周期,可连续或猝发,猝发时间间隔可帧频 12调)通道数4(每个通道可独立关闭)波长中心与带宽可灵活更换(注)视场角 23°数据输出接口千兆网口曝光控制模式外部触发工作温度/湿度 0-50°C / 20-80%存储温度/湿度 -20-80°C / 20-80%功耗10W@DC24V尺寸(L×W×H)mm 175×175×150(此为机身尺寸,镜头长度除外)重量 2.8kg注:波长中心与带宽分两种配置:标准配置和专业配置,指标如下:(1) 标准配置:通道序号 1 2 3 4 中心波长与带宽(nm) 450±20 550±20 650±20 800±50(2) 专业配置:可根据用户需求进行定制,目前已有的配置有如下两种:(a) 测水体、水汽通道序号 1 2 3 4 中心波长与带宽(nm) 850±20 905±10 930±10 940±10(b) 测大气、气溶胶通道序号 1 2 3 4 中心波长与带宽(nm) 490±10 670±10 870±10 950±40二.相机控制与图像存储单元CUP Intel core 2 Duo Processor,2.4GHz 存储单元 16GB高速访问电子盘数据接口千兆网口工作温度/湿度 0-45°C / 5-90%存储温度/湿度 -20-80°C / 5-90% 功耗50W@DC12V尺寸(L×W×H)mm 210×150×64重量 1.8kg三.电源锂电池组24V/10AH 尺寸(L×W×H)mm 180×60×55重量 1.15kg。
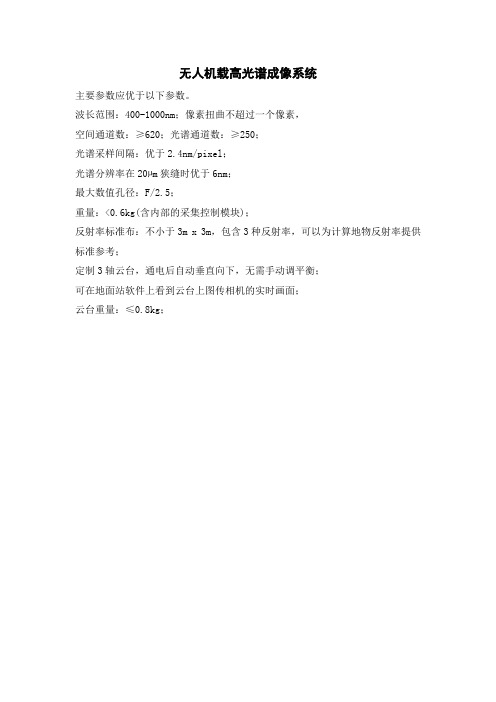
无人机载高光谱成像系统主要参数应优于以下参数。
波长范围:400-1000nm;像素扭曲不超过一个像素,空间通道数:≥620;光谱通道数:≥250;光谱采样间隔:优于2.4nm/pixel;光谱分辨率在20µm狭缝时优于6nm;最大数值孔径:F/2.5;重量:<0.6kg(含内部的采集控制模块);反射率标准布:不小于3m x 3m,包含3种反射率,可以为计算地物反射率提供标准参考;定制3轴云台,通电后自动垂直向下,无需手动调平衡;可在地面站软件上看到云台上图传相机的实时画面;云台重量:≤0.8kg;无人机载多光谱/热红外成像系统主要参数应优于以下参数。
重量≤800 g光谱波段:EO即电力光学:蓝色、绿色、红色、红边、近红外(NIR)LW IR(长波红外辐射)/ 热红外: 8-14um传感器分辨率:不低于2064*1544(每个EO(即电力光学)波段3.2 MP)/热红外线:不低于160*120北斗GPS定位系统仪器参数应优于以下主要参数。
解算技术:超越传统(固定/浮动)技术的 HD-GNSS处理引擎算法,比传统GNSS技术提供的误差估算评定更加精确。
卫星跟踪:360全星座技术,能够跟踪包括GPS、GLONASS、Galileo、北斗和QZSS卫星信号同步跟踪:–– GPS:L1C/A、L1C、L2C、L2E、L5;–– GLONASS:L1C/A、L1P、L2C/A、L2P、L3;–– SBAS:L1C/A、L5;–– Galileo:E1、E5A、E5B;––北斗:B1、B2、B3多星多频:不止于接收卫星数量,同时接收GPS、GLANASS、伽利略、北斗的第三频段信号通道:接收机通道数不少于440个通道,支持更多的卫星信号同步跟踪高精度静态精度:平面3mm+0.1ppm 高程3.5mm+0.4ppmRTK实时动态精度:平面8mm+1ppm 高程15mm+1ppm网络RTK精度:平面8mm+0.5ppm 高程15mm+0.5ppm定位速率:1Hz、2Hz、5Hz 10Hz和20Hz数据格式:CMR+, CMRx, RTCM 2.1, RTCM 2.3, RTCM 3.0, RTCM 3.1, RT CM 3.2的输入输出星站差分功能:具有OmniSTAR HP、XP、G2、VBS定位功能智能化程度:接收机可以通过WBUI管理界面,实现远程管理,下载数据等工作温度:-40℃~65℃防水/防尘:满足IP67等级,可侵入水下1米深可以承受从2米高测杆处跌落数据存储:主机4G内存:可以3年以上原始观测数据通讯链路:电台与蜂窝移动网络,同时具备。

无人机载多光谱相机设计Chapter 1: Introduction- Background and significance of remote sensing- The importance of multispectral imaging in remote sensing- The need for unmanned aerial vehicles (UAVs) in remote sensing Chapter 2: Literature Review- Overview of multispectral imaging techniques- Review of design considerations for UAV remote sensing systems- Discussion of existing UAV-based multispectral imaging systems Chapter 3: Methodology- Description of the proposed UAV-based multispectral imaging system- Design of the multispectral camera- Integration of the camera with the UAV platform- Testing procedures and protocolsChapter 4: Results and Discussion- Discussion of the performance of the proposed multispectral imaging system- Comparison with existing systems- Analysis of data collected with the systemChapter 5: Conclusions and Future Work- Summary of the study- Implications for remote sensing and environmental monitoring- Future directions for research and development of UAV-based multispectral imaging systems.第一章:引言在世界各地,由于人口的增加和城市化的加速,环境问题变得变得越来越紧迫。

密级:硕士学位论文基于滤光片阵列分光的无人机载多光谱相机系统研究作者姓名:曹丛峰指导教师: 方俊永副研究员中国科学院遥感与数字地球研究所学位类别: 工学硕士学科专业: 信号与信息处理培养单位: 中国科学院遥感与数字地球研究所2017年6 月Research of UA V-borne Multispectral Camera System Based on Narrow Bandwidth Filter ArrayA Dissertation Submitted toThe University of Chinese Academy of SciencesIn partial fulfillment of the requirementFor the degree ofMaster of EngineeringByCongfeng CaoThesis Supervisor:Associate Professor Fang JunyongInstitute of Remote Sensing and Digital EarthMay, 2017中国科学院大学学位论文原创性声明和使用授权说明原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
论文中凡引用他人已经发表或未发表的成果、数据、观点等,均已明确注明出处。
除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本声明的法律责任由本人承担。
论文作者签名:日期:年月日摘要高分辨率多光谱遥感影像从影像的空间结构和光谱特征两方面观测地物,提供了更多有价值的信息,在植被、农业、森林、环境保护和灾害应急等遥感应用中具有非常大的优势和潜力。
随着遥感应用的深入和精细化,更为机动灵活的遥感平台,如低空无人机及飞艇,逐渐与传统遥感方式如卫星和航空遥感技术形成互补,并受到越来越多的关注。
多光谱相机高稳定性光机结构设计技术随着科技的不断进步和发展,物联网、人工智能、机器学习等技术的迅速发展,多光谱成像技术成为了远程检测和环境监测中的一种非常有用的工具。
近年来,多光谱相机的应用不断扩大,例如在地质勘探、气象预测、环境污染监测、农业生产等领域中得到了广泛的应用。
但是,多光谱相机的应用还面临着很多挑战,其中之一就是光机结构的设计技术,这直接关系到多光谱相机的成像质量和稳定性。
因此,本篇论文将从多光谱相机高稳定性光机结构设计技术的角度探讨多光谱相机的应用以及关键技术。
一、多光谱相机的应用多光谱相机是一种通过捕捉不同波长的光谱图像来获取关于物体主要属性的图像。
与单色相机不同,多光谱相机包括多个图像传感器,可以为每个波长段捕捉一个图像。
所以,通过多光谱相机对图像进行处理,可以获得更多的物体信息,帮助我们更好、更准确地了解并判断物体的状态。
例如,多光谱相机可以用于环境污染监测,如检测海洋中水的浊度和颜色,评估空气中的微粒子和化学物质。
在农业生产中,多光谱相机可以用于监测作物状态、土壤含水量和肥料的运输过程。
特别是在地质勘探和气象预测方面,多光谱相机被广泛使用。
应用多光谱相机技术,在井深达10,000公尺,地下水域、极地、大洋中,便能够准确掌握地球的物质成分及移动规律。
二、多光谱相机光机结构的设计技术不可否认的是,光机结构是多光谱相机实现高稳定性成像的关键之一,它涉及到系统的光学性能和机械结构方面的设计,并与传感器的特性密切相互作用。
多光谱相机的光学系统通常具有两个主要的光学元件:分光器和滤波器。
分光器可以分离多光谱光谱的波长,而滤波器则可以去除不需要的光线,如红外光线。
多光谱相机的光学系统需要保证的是比较高的光谱分辨率、波长覆盖范围和信噪比。
为了设计高稳定性的多光谱相机光机结构,需要从以下几个方面进行考虑:1.光路设计:光路的设计是多光谱相机结构的一个重要因素,必须通向每个光学元件,并且每个元件的具体位置必须能够满足光学要求。
无人机载高光谱成像光学成像系统研究1.研究背景及意义光谱是光的强度随波长的分布记录,利用光谱技术研究目标结构及其特性,通过获取光的反射、吸收和散射信息获得与目标相关的结构、组成成分等信息已经成为目标探测的一种重要手段。
成像技术则是通过获取目标的空间信息来研究目标空间特性的技术。
这两个独立的技术在各自的领域里已有数百年的发展历史,直到上个世纪八十年代,随着遥感技术的兴起,空间探测和地表探测一时成为科学界研究的热点,光谱技术和成像技术的有效融合开始受到科学届的广泛关注。
单纯的地表空间信息或者地表光谱信息已无法满足对地探测的要求,希望能够同时得到包含地表空间信息和光谱信息的迫切需求促进了成像技术和光谱技术的结合,催生出了成像光谱技术。
根据光谱分辨率的不同,成像光谱系统可以分为多光谱成像系统(multi-spectral,MSI),高光谱成像系统(hyper-spectral,HSI)和超高光谱成像系统(ultra-spectral,USI)1]。
不同系统参数如表1.1所示。
表1.1 光谱成像系统的分辨率参数多光谱成像系统诞生于成像光谱技术发展的早期,主要用于地带分类等领域。
随着对成像光谱系统分辨率要求的不断提高,慢慢发展出了光谱分辨率更高的高光谱成像系统和超高光谱成像系统。
而超高光谱成像系统由于其超高的光谱分辨率通常用于大气微粒探测等精细探测领域。
高光谱成像系统则被广泛用于矿物勘探、农林资源调查、环境监控以及城市规划等诸多领域,是应用最为广泛的一类光谱成像系统[2]。
另外,成像光谱系统的搭载平台仍以地面、卫星和载人航天飞机为主。
虽然这些搭载平台在成像光谱系统的应用过程中发挥了重要作用,但由于缺少灵活性和使用成本过高,这些搭载平台也限制了高光谱成像系统的使用范围。
对于近年来发展起来的环境保护、灾害检测和精细农业等领域,常规的地面、卫星和高空航空遥感平台都难以发挥良好的效果。
随着近些年轻小型无人机技术的不断发展,灵活性高、使用成本低的优点使得低空无人机遥感平台为这些特殊需求提供了新的技术途径,未来势必会成为众多小区域范围、危险地域或应急动态调查区域等常规遥感平台难以发挥良好效果环境下的最佳选择。
面向精准农业的多光谱无人机成像系统研究一、多光谱无人机成像系统概述随着科技的不断进步,无人机技术在各个领域得到了广泛的应用,尤其是在农业领域,无人机成像技术为精准农业的发展提供了强有力的支持。
多光谱无人机成像系统是一种利用无人机搭载多光谱相机,通过捕捉不同波长的光谱信息,来获取农作物生长状况、土壤状况等农业信息的技术。
这种技术能够为农业生产提供更为精确的数据支持,从而提高农业生产的效率和质量。
1.1 多光谱成像技术原理多光谱成像技术是基于不同物质对不同波长光的吸收和反射特性不同,通过分析这些光谱信息,可以识别和区分不同的物质和物体。
在农业领域,多光谱成像技术可以捕捉到农作物的健康状况、病虫害情况、土壤养分分布等信息。
这些信息对于指导农业生产、优化资源配置具有重要意义。
1.2 多光谱无人机成像系统组成一个完整的多光谱无人机成像系统通常包括以下几个部分:无人机平台、多光谱相机、数据处理软件和地面控制站。
无人机平台负责携带相机进行飞行拍摄;多光谱相机负责捕捉不同波长的光谱信息;数据处理软件用于分析和处理拍摄到的图像数据;地面控制站则用于控制无人机的飞行和图像采集。
1.3 多光谱无人机成像系统的应用场景多光谱无人机成像系统在农业领域的应用场景非常广泛,主要包括以下几个方面:- 农作物生长监测:通过分析作物的光谱信息,可以监测作物的生长状况,及时发现生长异常,指导农业生产。
- 病虫害检测:多光谱成像技术可以识别作物的病虫害情况,为病虫害的早期防治提供依据。
- 土壤养分分析:通过分析土壤的光谱信息,可以了解土壤的养分状况,指导合理施肥。
- 作物产量预估:结合作物生长状况和历史数据,可以预估作物的产量,为农业生产提供决策支持。
二、面向精准农业的多光谱无人机成像系统研究进展精准农业是现代农业发展的重要方向,它通过精确的农业信息获取和分析,实现农业生产的精准化管理。
多光谱无人机成像系统作为精准农业的重要技术手段,近年来得到了广泛的研究和应用。