第七章 控制系统的校正设计(第十八讲)
- 格式:ppt
- 大小:1.88 MB
- 文档页数:73

实验五 控制系统的设计和校正一、实验目的1、对给定系统,设计满足性能指标的校正装置。
2、加深理解校正装置对系统的动、静态性能的校正作用。
3、用MATLAB/Simulink 观察校正环节对系统稳定性及过渡过程的影响。
二、实验仪器设备Pc 机一台,MATLAB 软件。
三、实验内容1、设控制系统原有部分的开环传递函数为:0(1)K G s s =+1)要求设计串联校正装置,使系统具有12,40o K γ=≥的性能指标。
2)绘制校正前、后系统的频率特性及单位阶跃响应曲线。
2、设未校正系统原有部分的开环传递函数为:0(0.11)(0.21)KG s s s =++1)试设计串联校正装置,使系统满足下列性能指标:30,40o K γ=≥2)用时域响应曲线验证。
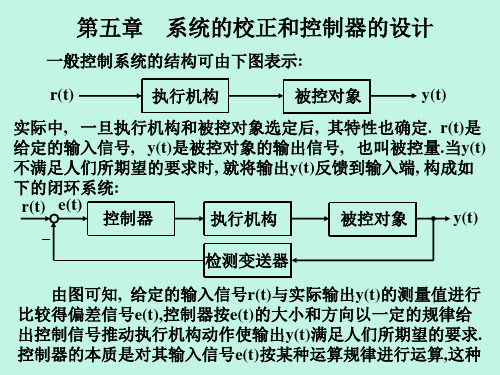
3、已知反馈校正系统结构图及传数如下:11G K =210(0.11)(0.011)G s s =++ 30.1G s =求:1)用综合法设计反馈校正装置,使系统的静态速度误差系数1200v K s ->,单位阶跃响应时,超调量20%p M <,调整时间0.6s t s <。
2)用simulink观察反馈校正环节对系统稳定性及过渡过程的影响。
四、实验步骤(1)计算校正装置参数;(2)绘制校正前、后系统bode图;(3)绘制校正前、后系统时域响应曲线;五、实验结果1、校正前系统的bode图:图中的求取的相角裕度为16.4度。
校正前系统的单位阶跃响应曲线:校正后系统的bode图:图中的求取的相角裕度为49.5度。
所以,相角裕度49.540o o γ=>,满足设计要求。
2、校正后系统的bode 图:图中的求取的相角裕度为42.2度。
所以,相角裕度42.240o o γ=>,满足设计要求。
3、单位阶跃信号的时域响应波形如下:由波形图可见,单位阶跃响应时,超调量20%p M <,调整时间0.6s t s <,满足设计要求。


控制系统的校正(一)一、校正方式1、串联校正;2、反馈校正;3、对输入的前置校正;4、对干扰的前置校正。
二、校正设计的方法3.等效结构与等效传递函数方法主要是应用开环Bode 图。
基本做法是利用校正装置的Bode ,配合开环增益的调整,修改原系统的Bode 图,使得校正后的Bode 图符合性能指标的要求。
1.频率法2.根轨迹法利用校正装置的零、极点,使校正后的系统,根据闭环主导极点估算的时域性能指标满足要求。
将给定的结构(或传递函数)等效为已知的典型结构或典型的一、二阶系统,并进行对比分析,得出校正网络的参数。
三、串联校正1.超前校正(相位超前校正)2.滞后校正(相位滞后校正()111)(>++=a Ts aTss G c 超前校正装置的传递函数为L (ω)aT m 1=ω20lg G c (jωm )=10lg a 其中:11=tg ()()aT tg T ()−−−ϕωωω11sin 1m a a −−=+ϕ四、超前校正频率法超前校正频率法设计思路:利用超前校正装置提供的正相移,增大校正后系统的相稳定裕度。
因此,通常将校正后系统的截止频率取为:c m=ωω此时,超前装置提供的相移量为:11()sin 1m a a −−=+ϕω新的截止频率位于校正装置两个转折频率的几何中心,即:20lg ()10lg 0m G j a +=a T m 1=ω例1:单位负反馈系统的开环传递函数为)2()(+=s s Ks G 设计校正装置,使得系统的速度误差系数等于20,相稳定裕度。
45≥γ202)()(lim 0==⋅=→K s H s G s K s v 解K=40)15.0(20)(+=ωωωj j j G (1) 确定K 值调整增益后的开环频率特性为srad c /2.61=ω01004518)2.65.0(90180<=⨯−−=−tg γ11sin 1+−=−a a m ϕ(2) 计算原系统相稳定裕度14)(40211=+c c ωω截止频率满足1c ω计算相稳定裕度γ(3) 计算参数{ }a ()111)(>++=a Ts aTss G ca=3.26db 1.526.3lg 10=2020log() 5.12mm ωω=−⨯s rad m /5.8=ω5.81==a T m ω(4) 确定频率mω(5) 计算参数T 00015184511sin +−=+−−a a T =0.065011109.13421.0065.05.090)(−=+−−−=−−−c c c c tg tg tg ωωωωϕ加入校正装置后系统的开环传递函数为)1065.0)(15.0()121.0(20)()(+++=s s s s s G s G c (6) 验证001.45)(180=+=c ωϕγ满足性能指标要求。
