第4章汽车制动稳定性控制系统分析
- 格式:ppt
- 大小:9.25 MB
- 文档页数:65
汽车稳定性分析及对策研究随着汽车工业的不断发展,车辆的设计、制造和性能都得到了极大的提升,然而在实际驾驶过程中,车辆稳定性依然是一个十分重要的问题。
汽车稳定性不仅关乎车辆安全性,也直接影响了驾驶者的驾驶体验。
对汽车的稳定性分析和对策研究具有重要意义。
一、汽车稳定性分析1.1 车辆稳定性的定义车辆稳定性是指车辆在行驶中保持直线行驶或在转弯、避障等特殊场景下保持稳定的能力。
一个稳定的车辆能够更好地保持横向、纵向和转向的稳定性,提高了车辆的操控性和安全性。
1.2 影响车辆稳定性的因素车辆稳定性受到诸多因素的影响,包括悬挂系统、操控系统、车辆质量、车辆速度等。
其中最主要的因素包括横向稳定性和纵向稳定性。
横向稳定性是指车辆在转弯、避障等横向运动时的稳定性,主要受悬挂系统、车辆重心、轮胎性能等因素影响。
而纵向稳定性是指车辆在加速、制动等纵向运动时的稳定性,主要受制动系统、悬挂系统、车辆重心等因素影响。
1.3 车辆稳定性测试为了评估车辆的稳定性,工程师们设计了一系列的测试项目来检验车辆在各种运动情况下的性能。
比如在横向稳定性测试中,会进行转向稳定性测试、侧倾角测试、悬挂系统性能测试等;在纵向稳定性测试中,会进行加速稳定性测试、制动稳定性测试等。
只有通过这些测试项目,才能够全面评估车辆的稳定性能力。
二、汽车稳定性对策研究2.1 悬挂系统优化悬挂系统是影响车辆稳定性最重要的部件之一,因此优化悬挂系统对于提升车辆稳定性至关重要。
通过采用新材料、新工艺、新设计,可以提高悬挂系统的刚性和稳定性,从而减小车身的横摇、纵摇等现象,提高车辆的稳定性。
2.2 轮胎性能提升轮胎是车辆与地面接触的唯一部件,其性能直接影响车辆的操控性和安全性。
因此改善轮胎的性能,是提升车辆稳定性的有效途径。
可以通过采用新材料、新结构、新制造工艺等手段来提升轮胎的抓地力、耐磨性等性能,从而提高车辆在横向和纵向运动中的稳定性。
2.3 电子稳定控制系统随着电子技术的不断进步,车辆的稳定性控制系统也得到了极大的提升。

制动系统稳定性控制技术研究随着汽车技术的不断发展,汽车制造企业不断加强对汽车安全方面的关注。
其中,制动系统的稳定性控制技术是汽车安全研究的一个重要方面。
本文将探讨制动系统稳定性控制技术的研究现状、存在的问题以及未来的发展趋势。
一、制动系统稳定性控制技术的研究现状制动系统稳定性控制技术主要指的是在汽车制动过程中,通过各种传感器、控制系统和执行器等设备,对汽车的制动系统进行实时监控和调节,以保证车辆的稳定性和安全性。
目前,主要的制动系统稳定性控制技术主要包括以下两种:1. ABS技术ABS(防抱死制动系统)技术可以有效防止汽车在紧急制动时车轮的抱死,从而保证汽车的制动距离和方向的稳定性。
ABS技术通过计算车轮转速差异,在汽车制动时,控制制动系统对不同车轮施加不同的制动力度,从而保证车轮的正常旋转。
同时,ABS技术还可以在汽车的紧急制动时,通过调节车轮制动力度,避免汽车侧滑或滑动,从而有效提高了汽车的制动安全性。
2. ESP技术ESP(电子稳定控制系统)技术可以通过传感器等设备监测汽车的滑动、侧滑、转向角度等常见失控情况,同时通过控制制动系统、油门、转向等器件进行调节,从而避免汽车的侧翻、翻滚、失控等情况的发生。
ESP技术可以提高汽车行驶时的稳定性和安全性,同时可以有效减少交通事故的发生率。
二、制动系统稳定性控制技术存在的问题目前,制动系统稳定性控制技术研究面临着一些问题:1. 技术成本高制动系统稳定性控制技术的设计、研发、生产和安装等步骤需要高昂的技术投入和劳动力成本,目前技术成本较高。
2. 技术水平不同在不同的汽车品牌和型号之间,制动系统稳定性控制技术的应用程度、控制精度等方面存在较大差异,同时各个厂家的技术水平不同,也存在一定的技术不可兼容性。
3. 特定场景下的制动问题制动系统稳定性控制技术有时仍不能完全避免特定场景下的制动问题,如极端气候、路面条件恶劣等情况下,汽车的制动性能可能会出现明显下降。
第4章 汽车的制动性 学习目标通过本章的学习,要求掌握制动性的评价指标;掌握制动时汽车的受力情况以及地面制动力、制动器制动力与地面附着力之间的关系;掌握汽车制动距离的概念和计算方法;能对制动跑偏和制动侧滑进行正确的受力分析和运动分析;熟练分析前、后制动器制动力具有固定比值的汽车在各种路面上的制动过程;了解自动防抱死系统的原理。
为了保障汽车行驶安全和使汽车的动力性得以发挥,汽车必须具有良好的制动性。
对于行车制动而言,汽车的制动性能是指汽车行驶时,能在短距离内停车且维持行驶方向稳定,在下长坡时能维持较低车速的能力。
汽车的制动性是汽车的主要性能之一。
制动性直接关系到交通安全,重大交通事故往往与制动距离太长、紧急制动时发生侧滑等情况有关,故汽车的制动性是汽车行驶的重要保障。
改善汽车的制动性始终是汽车设计制造和使用部门的重要任务。
节 制动性的评价指标制动性主要用以下三方面指标来评价:4.1.1 制动效能。
包括制动减速度、制动距离、制动时间及制动力等。
制动效能是指在良好路面上,汽车以一定初速制动到停车的制动距离或制动时汽车的肩速度。
它是制动性能最基本的评价指标。
4.1.2 制动效能的恒定性。
包括抗热衰退和水衰退的能力。
汽车高速行驶或下长坡连续制动时制动效能保持的程度,称为抗热衰退性能。
因为制动过程实际上是把汽车行驶的动能通过制动器吸收转换为热能,所以制动器温度升高后,能否保持在冷状态时的制动效能已成为设计制动器时要考虑的一个重要问题。
此外,涉水行驶后,制动器还存在水衰退问题。
4.1.3 制动时的方向稳定性。
指制动时汽车按照驾驶员给定方向行驶的能力,即是否会发 生制动跑偏、侧滑和失去转向能力等。
制动时汽车的方向稳定性,常用制动时汽车按给定路径行驶的能力来评价。
若制动器发生跑片、侧滑或失去转向能力,则汽车将偏离原来的路径。
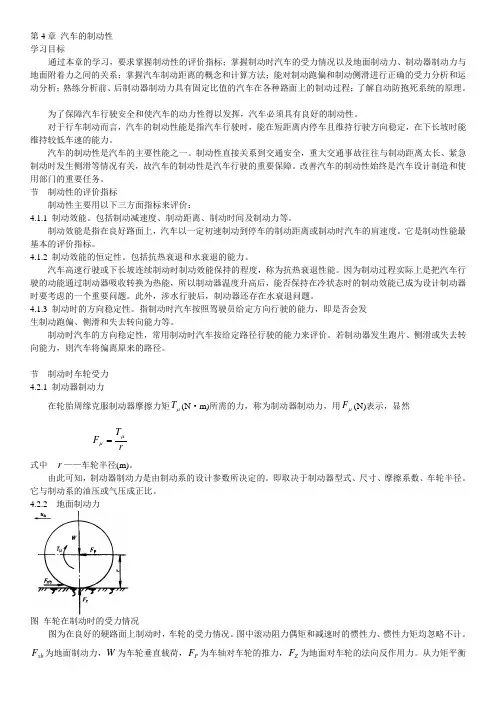
节 制动时车轮受力 4.2.1 制动器制动力在轮胎周缘克服制动器摩擦力矩μT (N ·m)所需的力,称为制动器制动力,用μF (N)表示,显然rT F μμ=式中 r ——车轮半径(m)。
汽车刹车系统稳定性分析与控制方法研究汽车安全性是当前社会越来越重视的问题,其中刹车系统的稳定性是影响车辆安全性的重要因素之一。
因此,研究汽车刹车系统的稳定性及其控制方法对于汽车安全性的提升具有重要意义。
一、汽车刹车系统的基本组成及工作原理汽车刹车系统一般包括刹车踏板、主缸、刹车筒、刹车鼓(或刹车盘)、刹车管路、刹车片等组件。
当驾驶员踩下刹车踏板时,主缸将油压送到刹车筒中,使之膨胀,推动刹车鼓(或刹车盘)转动,并使刹车片紧贴刹车鼓(或刹车盘),以达到刹车的目的。
二、汽车刹车系统的稳定性问题在实际的驾驶中,刹车系统的稳定性是一个重要的问题。
刹车系统可能出现的问题包括:车辆刹车时抖动、制动偏差、刹车距离过长等。
车辆在刹车时出现抖动的原因可能是制动系统不平衡,也可能是制动系统内部的防抱死系统(ABS)失效。
制动偏差的原因一般是刹车筒和刹车片磨损不平衡,或者是刹车片和刹车鼓(或刹车盘)表面不平整。
而刹车距离过长的原因可能是刹车片与刹车鼓(或刹车盘)黏着力不够,或者是油路压力不足等。
三、刹车系统的控制方法为了提高汽车刹车系统的稳定性,可采用以下几种控制方法。
1、引入防抱死系统(ABS)防抱死系统是一种电子系统,能够对刹车系统的油路压力进行控制,从而避免车轮在制动时发生抱死。
当车轮在制动时速度过快,防抱死系统会自动地减少刹车油路的压力,使轮胎重新获得旋转自由,从而避免车辆失控。
引入防抱死系统能够大大提高车辆的行驶安全性。
2、采用电子刹车力分配系统(EBD)电子刹车力分配系统是一种能够自动调节刹车力分配的电子系统,可以将刹车力分配到需要制动的轮胎上,从而避免制动力度过大或过小的问题。
3、加装陀螺仪陀螺仪是一种能够检测车身姿态和转向角度的仪器,能够帮助汽车刹车系统更准确地感知路况和车辆状态。
在刹车时,陀螺仪能够检测车辆横向的加速度和车速,从而根据车辆状态和路况提供刹车压力建议,使刹车系统更为稳定。
四、结语汽车刹车系统的稳定性是汽车行驶安全的重要保障。
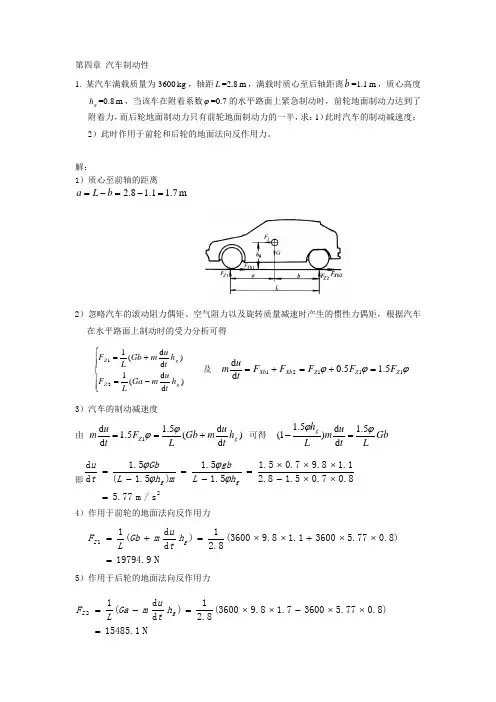
第四章4.1 一轿车驶经有积水层的—良好路面公路,当车速为100km/h 时要进行制动。
问此时有无可能出现滑水现象而丧失制动能力?轿车轮胎的胎压为179.27kPa 。
答:假设路面水层深度超过轮胎沟槽深度估算滑水车速:i h p 34.6=μ i p 为胎压(kPa ) 代入数据得:89.84=h μkm/h而h μμ> 故有可能出现滑水现象而失去制动能力。
4.2在第四章第三节二中.举出了CA700轿车的制动系由真空助力改为压缩空气助力后的制动试验结果。
试由表中所列数据估算''2'221ττ+的数值,以说明制动器作用时间的重要性。
提示:由表4-3的数据以及公式max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττ 计算''2'221ττ+的数值。
可以认为制动器起作用时间的减少是缩短制动距离的主要原因。
4.3一中型货车装有前、后制动器分开的双管路制功系,其有关参数如下;1)计算并绘制利用附着系数曲线与制动效率曲线。
2)求行驶车速30km/h ,在.0=ϕ80路面上车轮不抱死的制动距离。
计算时取制动系反应时间s 02.0'2=τ,制动减速度上升时间s 02.0''2=τ。
3)求制功系前部管路损坏时汽车的制功距离,制功系后部管路损坏时汽车的制功距离。
答案:1)前轴利用附着系数为:gf zh b zL +=βϕ 后轴利用附着系数为: ()gr zh a z L --=βϕ1空载时:g h b L -=βϕ0=413.0845.085.138.095.3-=-⨯ 0ϕϕ> 故空载时后轮总是先抱死。
由公式()Lh La zE g r rr /1/ϕβϕ+-==代入数据rrE ϕ845.0449.21.2+=(作图如下)满载时:g h b L -=βϕ0=4282.017.1138.095.3=-⨯ 0ϕϕ<时:前轮先抱死L h Lb zE g f ff //ϕβϕ-==代入数据f E =fϕ17.1501.11-(作图如下)0ϕϕ>时:后轮先抱死 ()Lh La zE g r rr /1/ϕβϕ+-==代入数据r E =rϕ17.1449.295.2+(作图如下)2)由图或者计算可得:空载时 8.0=ϕ制动效率约为0.7因此其最大动减速度g g a b 56.07.08.0max =⨯= 代入公式:max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττg56.092.253030202.002.06.312⨯+⨯⎪⎭⎫ ⎝⎛+==6.57m 由图或者计算可得: 满载时 制动效率为0.87因此其最大动减速度g g a b 696.087.08.0max '=⨯= 制动距离max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττg696.092.253030202.002.06.312⨯+⨯⎪⎭⎫ ⎝⎛+==5.34m3)A.若制动系前部管路损坏 Gz dt dug G F xb ==2)(2g z zh a LGF -=⇒后轴利用附着系数 gr zh a Lz -=ϕ⇒后轴制动效率Lh La z E g r rr /1/ϕϕ+==代入数据得:空载时:r E =0.45满载时:r E =0.60a)空载时 其最大动减速度g g a b 36.045.08.0max =⨯=代入公式:max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττg36.092.253030202.002.06.312⨯+⨯⎪⎭⎫ ⎝⎛+==10.09mb)满载时 其最大动减速度g g a b 48.06.08.0max =⨯=代入公式:max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττg48.092.253030202.002.06.312⨯+⨯⎪⎭⎫ ⎝⎛+==7.63mB .若制动系后部管路损坏 Gz dt dug G F xb ==1)(1g z zh b LGF +=⇒前轴利用附着系数 gf zh b Lz +=ϕ⇒前轴制动效率Lh Lb zE g f ff /1/ϕϕ-==代入数据 空载时:f E =0.57 满载时:f E =0.33a)空载时 其最大动减速度g g a b 456.057.08.0max =⨯=代入公式:max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττg456.092.253030202.002.06.312⨯+⨯⎪⎭⎫ ⎝⎛+==8.02mb)满载时 其最大动减速度g g a b 264.033.08.0max =⨯=代入公式:max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττg264.092.253030202.002.06.312⨯+⨯⎪⎭⎫ ⎝⎛+==13.67m4.4在汽车法规中,对双轴汽车前、后轴制功力的分配有何规定。
汽车稳定控制系统的工作原理汽车稳定控制系统(Electronic Stability Control,ESC)是一种现代化的安全辅助系统,旨在提高车辆的稳定性和操控性。
它通过使用传感器和控制单元,对车辆的行驶状态进行监测和控制,以避免失控和减少交通事故的发生。
下面将详细介绍汽车稳定控制系统的工作原理。
1. 传感器的作用汽车稳定控制系统通过各种传感器来感知车辆的动态信息。
其中包括车轮速度传感器、方向盘转角传感器、横摆角度传感器、纵向加速度传感器等。
这些传感器能够实时获取车辆的车速、转向角度、横向姿态以及车辆的运动状态等重要参数。
2. 控制单元的功能汽车稳定控制系统的核心是控制单元,它负责对传感器获取的信息进行分析和处理。
控制单元可以根据车辆的动态特性和当前驾驶条件来确定最佳的控制策略,并通过控制制动系统、发动机和转向系统等来实施这些策略。
3. 判定车辆是否失控在行驶过程中,控制单元会不断地分析车辆的动态信息,并与预设的各种模型进行比较。
如果控制单元判定车辆正在发生失控或有失控的趋势,它会立即采取相应的措施来恢复车辆的稳定。
4. 利用制动系统控制车辆稳定当控制单元判定车辆失去稳定性时,它会通过制动系统来控制车轮的制动力分配。
如果某个车轮速度过高,控制单元会自动通过电动泵抑制制动力,以达到减速的效果。
这样可以避免车辆发生横滑现象,增加稳定性。
5. 增加发动机输出扭矩除了通过制动系统控制稳定外,控制单元还可以通过调整发动机输出扭矩来对车辆进行控制。
当车辆存在失控趋势时,控制单元会减小发动机的输出力矩,以减少车轮的驱动力,从而控制车辆的动力分配,提高稳定性。
6. 通过转向系统辅助操控汽车稳定控制系统还可以通过转向系统来辅助驾驶员操控车辆。
当控制单元判断车辆出现失控趋势时,它可以通过控制转向系统对车轮角度进行微调,以纠正车辆的行驶方向,保持车辆的稳定。
7. 人机交互与驾驶员警示为了使驾驶员及时了解车辆的工作状态,汽车稳定控制系统还会通过仪表盘上的指示灯、声音和震动等方式来警示驾驶员。
ESP研究报告一、什么是ESPESP:Electronic Stability Program,即车辆稳定性控制系统,该系统是通过适当的车姿调整(通过合理分配纵向和侧向轮胎力,精确控制极限附着情况下的汽车动力学行为使汽车在物理极限内最大限度按照驾驶员的意愿行驶)和发动机的调节来控制汽车,使其能达到驾驶员想要的操作意图,能在驱动、驾驶、制动、弯路及变线过程中,保持车辆的稳定及安全,被公认为汽车安全技术中继安全带,安全气囊,ABS之后的又一项里程碑式的突破。
二、ESP的功能ESP包括如下功能:ØABS:ANTI-LOCK BRAKE SYSTEM,制动防抱死系统ØASR:ANTI-SLIP REGULATION,驱动力控制系统,也称TCSØESC:ELECTRICA STABILITY CONTROL,电子稳定性控制系统二、ESP的功能ABS功能介绍及控制原理:该系统叫做制动防抱死系统,是在汽车进行制动时,防止车轮抱死,使轮胎与地面之间的附着系数达到最佳值,保证最大的制动力的同时,还需要保证具有一定的测向附着力,该系统具有以下的优点:Ø最短的制动距离;Ø制动时具有转向能力;Ø制动稳定性好;Ø减少轮胎磨损;Ø减少浮滑现象。
ASR功能介绍及控制原理:该系统叫做驱动力控制系统,又称循迹控制系统,汽车在起步或急加速时,驱动轮会出现打滑,在冰雪等光滑路面上还会使方向失控而出危险,ASR依靠传感器感应驱动轮与从动轮之间的转速差来判断驱动轮是否处于打滑状态,如出现打滑,则ASR ECU会向发动机输出指令,调节点火时间,减小节气门开度,减小油门,降档或对车轮进行制动,使车轮不再打滑,该系统具有以下优点:Ø提高汽车行驶稳定性;Ø提高加速性能;Ø提高爬坡能力。
ESC功能介绍及控制原理:该系统是在整车运动过程中,通过测量整车的相关参数,横摆角速度、纵向加速度、侧向加速度、发动机状态及轮胎与地面之间的纵向及横向附着系数利用率来判断整车的姿态是否处于驾驶员期望的状态中,如出现不符合的情况,将通过对部分车轮施加制动力,提供回正力矩,使整车处于最合理的姿态进行运动。