abaqus悬臂梁拓扑优化
- 格式:doc
- 大小:230.50 KB
- 文档页数:5
线性静力学分析实例——以悬臂梁为例线性静力学问题是简单且常见的有限元分析类型,不涉及任何非线性(材料非线性、几何非线性、接触等),也不考虑惯性及时间相关的材料属性。
在ABAQUS中,该类问题通常采用静态通用(Static,General)分析步或静态线性摄动(Static,Linear perturbation)分析步进行分析。
线性静力学问题很容易求解,往往用户更关系的是计算效率和求解效率,希望在获得较高精度的前提下尽量缩短计算时间,特别是大型模型。
这主要取决于网格的划分,包括种子的设置、网格控制和单元类型的选取。
在一般的分析中,应尽量选用精度和效率都较高的二次四边形/六面体单元,在主要的分析部位设置较密的种子;若主要分析部位的网格没有大的扭曲,使用非协调单元(如CPS4I、C3D8I)的性价比很高。
对于复杂模型,可以采用分割模型的方法划分二次四边形/六面体单元;有时分割过程过于繁琐,用户可以采用精度较高的二次三角形/四面体单元进行网格划分。
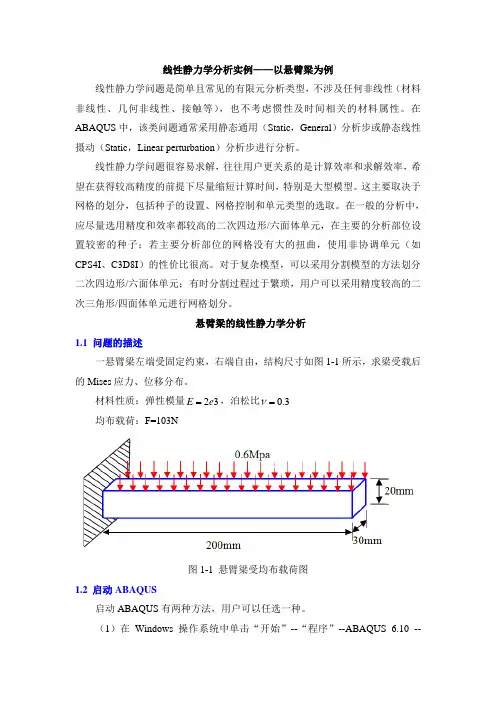
悬臂梁的线性静力学分析1.1 问题的描述一悬臂梁左端受固定约束,右端自由,结构尺寸如图1-1所示,求梁受载后的Mises应力、位移分布。
ν材料性质:弹性模量3=E=,泊松比3.02e均布载荷:F=103N图1-1 悬臂梁受均布载荷图1.2 启动ABAQUS启动ABAQUS有两种方法,用户可以任选一种。
(1)在Windows操作系统中单击“开始”--“程序”--ABAQUS 6.10 --ABAQUS/CAE。
(2)在操作系统的DOS窗口中输入命令:abaqus cae。
启动ABAQUS/CAE后,在出现的Start Section(开始任务)对话框中选择Create Model Database。
1.3 创建部件在ABAQUS/CAE顶部的环境栏中,可以看到模块列表:Module:Part,这表示当前处在Part(部件)模块,在这个模块中可以定义模型各部分的几何形体。
ABAQUS拓扑优化手册ABAQUS拓扑优化分析手册/用户手册分析手册:13. Optimization Techniques优化技术13.1 结构优化:概述13.1.1 概述ABAQUS结构优化是一个帮助用户精细化设计的迭代模块。
结构优化设计能够使得结构组件轻量化,并满足刚度和耐久性要求。
ABAQUS提供了两种优化方法——拓扑优化和形状优化。
拓扑优化(Topology optimization)通过分析过程中不断修改最初模型中指定优化区域的单元材料性质,有效地从分析的模型中移走/增加单元而获得最优的设计目标。
形状优化(Shape optimization)则是在分析中对指定的优化区域不断移动表面节点从而达到减小局部应力集中的优化目标。
拓扑优化和形状优化均遵从一系列优化目标和约束。
最优化方法(Optimization)是一个通过自动化程序增加设计者在经验和直觉从而缩短研发过程的工具。
想要优化模型,必须知道如何去优化,仅仅说要减小应力或者增大特征值是不够,做优化必须有更专门的描述。
比方说,想要降低在两种不同载荷工况下的最大节点力,类似的还有,想要最大化前五阶特征值之和。
这种最优化的目标称之为目标函数(Object Function)。
另外,在优化过程中可以同时强制限定某些状态参量。
例如,可以指定某节点的位移不超过一定的数值。
这些强制性的指定措施叫做约束(Constraint)。
ABAQUS/CAE可以创建模型然后定义、配置和执行结构优化。
更多信息请参考第十八章。
13.1.2 术语(Terminology)设计区域(Design area): 设计区域即模型需要优化的区域。
这个区域可以是整个模型,也可以是模型的一部分或者数部分。
一定的边界条件、载荷及人为约束下,拓扑优化通过增加/删除区域中单元的材料达到最优化设计,而形状优化通过移动区域内节点来达到优化的目的。
设计变量(Design variables):设计变量即优化设计中需要改变的参数。
配置拓扑优化任务优化模块提供了各种设置,允许您配置拓扑优化任务。
配置设置取决于您是为一般拓扑优化配置优化任务,还是为基于条件的拓扑优化配置优化任务。
包括以下主题:“配置一般拓扑优化任务”“配置基于条件的拓扑优化任务”配置一般拓扑优化任务一般拓扑优化是一种灵活的、基于敏感性的优化,允许您将一系列约束和目标函数应用于模型。
您可以使用优化任务编辑器自定义一般拓扑优化的各个方面。
要定位编辑器,请从主菜单栏中选择Task-Edit-optimization任务名称。
要指定一般拓扑优化,请选择Advanced选项卡并选择general optimization(基于灵敏度)。
包括以下主题:“配置基本设置”“配置密度设置”“配置扰动设置”收敛“配置选项”“配置高级选项”配置基本设置配置基本设置:1.在优化任务编辑器中,单击Basic选项卡。
2.选择是冻结荷载还是边界条件区域。
建议您冻结应用指定条件的区域,因为您不希望在优化过程中删除这些区域。
冻结这些区域可以稳定优化,并常常导致迭代次数显著减少。
配置密度设置配置密度设置:在优化任务编辑器中,单击Density选项卡。
选择密度更新策略。
此设置控制优化模块在优化期间更新设计元素的相对材料密度的速度。
在大多数情况下,您应该接受默认设置(正常)。
然而,如果设计响应非常敏感,并且在满足约束方面存在问题,则可能需要更保守的速率,这需要更多的优化迭代。
在初始优化迭代过程中,指定每个元素的相对密度:选择优化产品默认值,允许优化模块确定初始密度。
如果选择材料体积作为约束,优化模块计算初始密度,使体积约束得到准确的满足。
如果选择材料体积作为目标函数,每个元素的初始相对密度为50%。
选择指定并输入一个值(0.0 <初始密度≤1.0)。
只有在选择体积作为目标函数而不是约束时,才应该使用此选项;如果您知道,在优化之前,将初始密度设置为较大或较小的值将满足其他约束;例如,位移约束。
基于ABAQUS的悬臂梁的弹塑性弯曲分析学院:航空宇航学院专业:工程力学指导教师:姓名:学号:1. 问题描述考虑端点受集中力F 作用的矩形截面的悬臂梁,如图1所示,长度l=10m ,高度h=1m ,宽度b=1m 。
材料为理想弹塑性钢材(如图2),并遵守Mises 屈服准则,屈服强度为MPa Y 380=σ,弹性模量GPa E 200=,泊松比3.0=υ。
图1 受集中力作用的悬臂梁 图2 钢材的应力-应变行为首先通过理论分析理想弹塑性材料悬臂梁的弹塑性弯曲,得到悬臂梁的弹塑性弯曲变形的规律和塑性区形状,确定弹性极限载荷e F 和塑性极限载荷Y F ;其次利用ABAQUS 模拟了该悬臂梁受集中载荷作用的变形过程,得出弹性极限载荷e F 、塑性极限载荷Y F 、塑性区形状和载荷-位移曲线,与理论分析的结果进行对比,验证有限元分析的准确性。
2. 理论分析2.1梁的弹塑性纯弯曲对于矩形截面Euler-Bernoulli 梁,受弯矩M 作用,如图3所示,根据平截面假定,有图3 矩形截面梁受弯矩M 的作用y κε= (1)其中κ为弯曲后梁轴的曲率,规定梁的挠度w 以与y 同向为正,则在小变形情况有22-dx w d =κ (2)当弯矩M 由零逐渐增大时,起初整个截面都处于弹性状态,这是Hooke 定律给出()y E E y κεσ== (3) 再由平衡方程,可得到κEI M = (4) 其中,3121bh I =是截面的惯性矩。
将EI M /=κ带入(3)式,可知 I y /M =σ显然,最外层纤维的应力值最大。
当M 增大时,最外层纤维首先达到屈服,即Y h y bh M σσ==±=22/61/ (5)这时的弯矩是整个截面处于弹性状态所能承受的最大弯矩,即为弹性极限弯矩,它等于261bh M Y e σ= (6)对应的曲率可由式(4)求得Eh EI M Y e e /2/σκ== (7)当e M M >时,梁的外层纤维的应变继续增大,但应力值保持为Y σ不再增加,塑性区将逐渐向内扩大。
⽤Abaqus进⾏压电(Piezoelectric)悬臂梁模拟⼊门详解_第⼆版⽤ABAQUS 进⾏压电(Piezoelectric )悬臂梁模拟⼊门详解作者:X.C. Li 2014.8 (第⼆版)本⽂着重讲述在⽤ABAQUS 模拟压电材料时,材料常数的设置。
希望对⼊门者有所帮助。
如果发现错误请发邮件到:Lxc1975@/doc/1530584d7f21af45b307e87101f69e314332facc.html 。
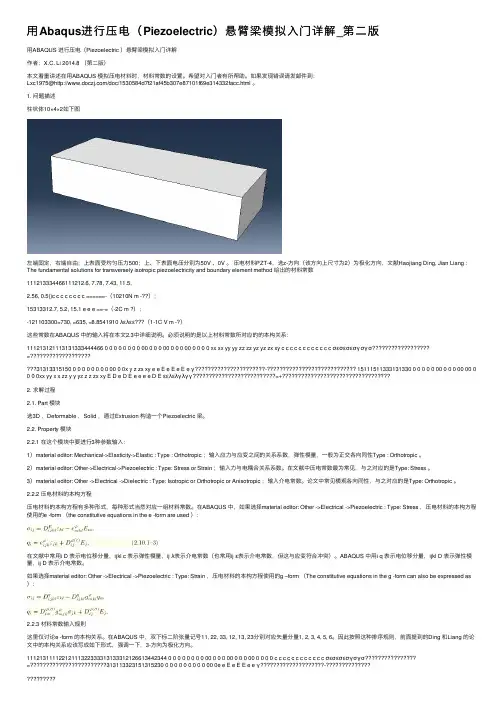
1. 问题描述柱状体10×4×2如下图左端固定,右端⾃由;上表⾯受均匀压⼒500;上、下表⾯电压分别为50V 、0V 。
压电材料PZT-4,选z-⽅向(该⽅向上尺⼨为2)为极化⽅向,⽂献Haojiang Ding, Jian Liang :The fundamental solutions for transversely isotropic piezoelectricity and boundary element method 给出的材料常数111213334466111212.6, 7.78, 7.43, 11.5,2.56, 0.5()c c c c c c c c ======-(10210N m -??);15313312.7, 5.2, 15.1 e e e ==-=(-2C m ?);-121103300=730, =635, =8.8541910 λελεε(1-1C V m -?)这些常数在ABAQUS 中的输⼊将在本⽂2.3中详细说明。
必须说明的是以上材料常数所对应的的本构关系:111213121113131333444466 0 0 0 0 0 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0 0 xx xx yy yy zz zz yz yz zx xy c c c c c c c c c c c c σεσεσεσγσγσ=31313315150 0 0 0 0 0 0 0 0 00 0 0x y z zx xy e e E e E e E e γ-?????? 15111511333131330 0 0 0 0 0 00 0 0 0 00 00 0 0 0 0xx yy x x zz y y yz z z zx xy E D e D E e e e e D E εελελγλγγ=+????????2. 求解过程2.1. Part 模块选3D ,Deformable ,Solid ,通过Extrusion 构造⼀个Piezoelectric 梁。
《装备制造技术>2020年第04期基于悬臂梁的拓扑优化软件对比研究郑雪芬,姚佳祥(广西科技大学机械与交通院,广西柳州545006)摘要:为分析不同的有限元分析软件的拓扑优化的质量和效率,分别基于ANSYS Workbench、NX Nastran、MATLAB (88行版变密法拓扑优化代码)这些较常用的有限元分析软件在相同条件的情况下对悬臂梁进行拓扑优化,对这些有限元分析软件的拓扑优化效率、质量进行对比,找出各商用软件在拓扑优化设计领域的适用范围和优势。
关键词:有限元分析软件;拓扑优化;悬臂梁;MATLAB中图分类号:TH164文献标识码:A文章编号:#672-545X(2020)04-0107-030引言拓扑优化是结构优化的一种,相对其他结构优化方法具有更多的设计自由度,能够获得更大的设计空间,是航空航天等设计领域中的必要手段之一叫其主要是根据载荷情况、约束条件(如应力、位移和体积等)和性能指标(刚度、强度等),利用有限元分析和拓扑优化方法,使设计区域达到最优材的一种结构优化方法$2&。
段体拓扑优化方法主要有化方法、度法、法、结构1法等冈,其中法$4&经被应用到商用优化软件中,设计人员使用商用优化软件或根据法理用对结构优化,达到结构优化的目的,如口强等人ANSYS Workbench商用优化软件对DVG850中件拓扑优化设计[5'61方设计员、等人UGNX商用优化软件(UG NX结构优化用NX Nastran件)对某的分析优化$力;0.Sigmund'Erik Andreassen、方宗德教授等人Matlab软件根据法原理,对件结构拓扑优化[8-I0]o段商优化软件和Matlab软件根据法理用应用,对拓扑优化设计方法应用中的对。
对拓扑优化设计软件中的应用,分别在ANSYS Workbench'NX Nastran中建立的MATLAB中的,对相的载荷、约束条件和拓扑优化约束条件拓扑优化设计对优化的和时间优化结的力和情况分析最根据对据商优化软件和Matlab软件根据法理拓扑优化设计领域的用自的优。
L3.1w w w .3d s .c o m | © D a s s a u l t S y s t èm e sLesson content:Abaqus Model Optimization Tasks Design Responses Objective Functions ConstraintsGeometric Restrictions Stop Conditions PostprocessingWorkshop 2a: Topology Optimization of a Cantilever Beam With Stamping Geometric Restrictions Workshop 2b: Topology Optimization of a Cantilever Beam With Demold Control Using the Central Plane TechniqueWorkshop 2c: Topology Optimization of a Cantilever Beam With Symmetry Geometric RestrictionsLesson 3: ATOM Workflow and Options2.5 hoursL3.2w w w .3d s .c o m | © D a s s a u l t S y s t èm e sAbaqus ModelThe Abaqus model must be ready prior to the setup of the optimizationAlthough not necessary, it is helpful to create sets that can be used later to define the optimization regionsShown on the right: A set was created to define the region (cell) where the stamping geometric restriction will be appliedw w w .3d s .c o m | © D a s s a u l t S y s t èm e sAn optimization task identifies the type of optimization and the design domain for the optimization.The task serves to configure the optimization algorithm to be usedCreate an optimization task from the Model Tree or the Optimization toolbox as shownChoose the type of optimization task accordinglyEach task also contains the design responses, objective functions, constraints, geometric restrictions and stop conditionsIn this lecture we discuss the setup of the task for topology optimizationL3.4w w w .3d s .c o m | © D a s s a u l t S y s t èm e sOptimization Tasks (2/6)For a topology optimization task, the optimization region is selected nextThe elements in the optimization region will constitute the design domainThe whole model is selected by defaultOften, the optimization region will only be a subset of the model.For example, on the right we have removed the deformable shaft from the display so that only the gear is selected as the optimization regionw w w .3d s .c o m | © D a s s a u l t S y s t èm e sHaving chosen the optimization type and region, it is now possible to configure the optimizationThe Basic tab of the optimization task editor allows the user to choose if the load and boundary regions are to be kept frozenFrozen areas are discussed further later in the context of geometric restrictionsL3.6w w w .3d s .c o m | © D a s s a u l t S y s t èm e sOptimization Tasks (4/6)The Density tab allows the user to change thedensity update strategy and configure other related parametersThese settings are only available for the sensitivity-based methodTip: These parameters rarely need to be changed; if necessary, use a more conservative strategy for a more stable optimizationw w w .3d s .c o m | © D a s s a u l t S y s t èm e sThe Advanced tab allows the user to switch to the condition-based approach if desiredThe condition-based approach is usually preferred for stiffness optimizationNote: the sensitivity-based approach is also able to optimize on stiffnessFor the condition-based approach, the user can configure the speed of the update scheme and the volume deleted in the first cycleThe advanced option “Delete soft elements in region” is recommended when solving problems where soft elements may distort excessively and cause convergence difficultyL3.8w w w .3d s .c o m | © D a s s a u l t S y s t èm e sOptimization Tasks (6/6)For sensitivity-based optimization the user may choose between the SIMP and the RAMP material interpolation techniquesRAMP is preferred for problems that are more dynamic in nature because the interpolation scheme is always concave.Criteria for convergence can be set here. Default criteria are usually sufficient.Note: the default penalty factor has been chosen carefully.Values less than 3 shouldn’t be used.Values greater than 3 significantly increase the chance of getting trapped in a local minimaw w w .3d s .c o m | © D a s s a u l t S y s t èm e sDesign responses are output variables that can be used to describe objective functions and constraintsAll available design responses forsensitivity-based optimization are shown on the rightCondition-based optimization can only have strain energy as the objective and volume as the constraintDesign responses can be a summation of values in the region or maximum/minimum of that regionDesign responses can also be summed across steps/load casesL3.10w w w .3d s .c o m | © D a s s a u l t S y s t èm e sDesign Responses (2/3)A design response can be a combination of previously defined design responsesFor example, on the right we have constructed design response D-Response-3 as aweighted combination of D-Response-1 and D-Response-2Sensitivity-based optimization supports the following operators:Weighted combinationDifferenceAbsolute differencew w w .3d s .c o m | © D a s s a u l t S y s t èm e sCondition-based optimization supports many more operators for creating combined termsL3.12w w w .3d s .c o m | © D a s s a u l t S y s t èm e sObjective Functions (1/2)Objective functions can be created from any previously defined design responsesDesign responses can be single term or combined termFurthermore, the objective function is always a weighted sum of the specified design responsesReference values are constants subtracted from the design responseReference values are meaningless for a condition-based topology optimizationL3.13w w w .3d s .c o m | © D a s s a u l t S y s t èm e sObjective Functions (2/2)Three objective target formulations are supported in topology optimizationMINMIN formulation minimizes the weighted sum of the specified design responsesMAXMAX formulation maximizes the sum of the specified design responsesMIN_MAX (minimize the maximum load case)MIN_MAX formulation minimizes the maximum of the two (or more) design responses specified in the objective function editorL3.14w w w .3d s .c o m | © D a s s a u l t S y s t èm e sConstraints (1/2)Constraints are an integral part of a topology optimizationAn unconstrained topology optimization is not allowed.An error is issued for such casesIn a condition-based topology optimization, only volume constraints are allowed and they are enforced as equality constraintsL3.15w w w .3d s .c o m | © D a s s a u l t S y s t èm e sConstraints (2/2)In sensitivity-based optimizations, many more constraints are allowedFilter by constraint while creating the design response to see what output variables can be chosen as constraints (shown below)Combined terms are allowed to be used as constraints (shown bottom right)Constraints are always inequalities in sensitivity-based optimizationL3.16w w w .3d s .c o m | © D a s s a u l t S y s t èm e sGeometric Restrictions (1/7)Geometric restrictions are additional constraints which are enforced independent of the optimizationGeometric restrictions can be used to enforce symmetries or minimum member sizes that are desired in the final designDemold control is perhaps the most important geometric restriction.It enables the user to place constraints such that the final design can be manufactured by casting.w w w .3d s .c o m | © D a s s a u l t S y s t èm e sFrozen areaFrozen area constraints ensure that no material is removed from the regions designated as frozen (relative density here is always 1)These constraints are particularly important in regions where loads and boundary conditions are specified since we don’t want these regions to become voids.In the gear example, the gear teeth and the inner circumference were kept frozen.Prevents losing contact with the shaft or losing the load path.FrozenL3.18w w w .3d s .c o m | © D a s s a u l t S y s t èm e sGeometric Restrictions (3/7)Member sizeTopology optimization can sometimes lead to thin or thick members that can be problematic to manufactureMember size restrictions provide filters to control the size of the membersUsers input a filter diameterNote:Maximum thickness restriction (and therefore enveloperestriction) is available only in sensitivity-based optimizationThe exact member size specified by the filter diameter isn’t guaranteedw w w .3d s .c o m | © D a s s a u l t S y s t èm e sDemold controlIf the topology obtained from the optimization is to be produced by casting, the formation of cavities and undercuts needs to be prevented by using demold controlDemold region: region where the demold control restriction is activeCollision check region: region where the removal of an element results in a hole or an undercut is checkedI.This region is same as the demold region by defaultII.This region should always contain at least the demold regionThe pull direction: the direction in which the two halves of the mold would be pulled in (as shown, bottom right)Center plane: central plane of the mold (as shown, bottom right)I.Can be specified or calculated automaticallyL3.20w w w .3d s .c o m | © D a s s a u l t S y s t èm e sGeometric Restrictions (5/7)Demold control (cont’d)The stamping option enforces the condition that if one element is removed from the structure, all others in the ± pull direction are also removedIn the gear example, a stamping constraint was used to ensure that only through holes are formed.Forging is a special case of casting. The forging die needs to be pulled in only one direction.The forging option creates a fictitious central plane internally on the back plane (shown below) so that pulling takes place in only one directionL3.21w w w .3d s .c o m | © D a s s a u l t S y s t èm e sGeometric Restrictions (6/7)SymmetryTopology optimization of symmetric loaded components usually leads to a symmetric designIn case we want a symmetric design but the loading isn’t symmetric, it is necessary to enforce symmetryPlane symmetryRotational symmetryCyclic symmetryPoint symmetryL3.22w w w .3d s .c o m | © D a s s a u l t S y s t èm e sGeometric Restrictions (7/7)It is possible to overconstrain the optimization.Care must be taken when specifying combinations of geometric restrictions.Examples:Planar symmetry can be combined with a pull direction if the pull direction is perpendicular or parallel to the symmetry plane.Rotation symmetry and the definition of a pull direction: this combination is possible if the pull direction is parallel to the axis of rotation.Two reflection symmetries can be combined if the planes are perpendicular.In general, begin the optimization study without geometric restrictions. Add them into the model one by one.L3.23w w w .3d s .c o m | © D a s s a u l t S y s t èm e sStop ConditionsThe optimization may be stopped before convergence is achieved if the stop conditions are achievedStop conditions can be constructed on displacements and stressesStop conditions are only supported in shape optimizationL3.24w w w .3d s .c o m | © D a s s a u l t S y s t èm e sPostprocessing (1/10)The relative densities of the elements in the optimization region are available in the field output variable MAT_PROP_NORMALIZEDw w w .3d s .c o m | © D a s s a u l t S y s t èm e sIn order to access the field output showing the relative densities of elements, switch to the step named ATOM OPTIMIZATIONFrom the main menu bar, select Results →Step/FrameSelect ATOM OPTIMIZATION as the step to visualizePlot contours of MAT_PROP_NORMALIZEDNote: Only the undeformed shape will be plotted. If the deformed shape is desired, switch back to Step-1_Optimization (or as named in your model)L3.26w w w .3d s .c o m | © D a s s a u l t S y s t èm e sPostprocessing (3/10)IsosurfacesThe soft elements can be visualized as voids using the Opt_surface cut in the View Cut ManagerRelative densities of the elements are centroidal quantities that are extrapolated and averaged at the nodes in order to obtain field outputAn isosurface is created that separates the soft elements from the hard elementsw w w .3d s .c o m | © D a s s a u l t S y s t èm e sWhat went wrong here?Can we tell by looking at stress or displacement plots?Iso value = 0.9 Iso value = 0.3L3.28w w w .3d s .c o m | © D a s s a u l t S y s t èm e sPostprocessing (5/10)Iso value = 0.9 Iso value = 0.3Note: Always plot MAT_PROP_NORMALIZED as field output and ensure that the isosurface is not cutting through fully dense elementsw w w .3d s .c o m | © D a s s a u l t S y s t èm e sBelow, isosurfaces are generated on element output (MAT_PROP_NORMALIZED) that is averaged at nodes with the averaging threshold at 100%Iso value = 0.9Iso value = 0.3L3.30w w w .3d s .c o m | © D a s s a u l t S y s t èm e sPostprocessing (7/10)ExtractionExtraction is a process of obtaining a surface mesh (STL format or its equivalent in an Abaqus input file) from a topology optimization resultOnce the isosurface is identified, new interior edges and surfaces are identified.Nodes are created on interior faces and a triangular mesh is created on the portion of the model to be retained.SmoothingThe isosurface provides first-order smoothing of a topology optimization resultDuring extraction the nodes on the interior surfaces are moved to achieve additional smoothing of the isosurfacew w w .3d s .c o m | © D a s s a u l t S y s t èm e sExtraction (cont’d)Reduction is the process of reducing the number of triangles in the STL representationThis is useful when converting a large STL file to a SAT file which can be imported and meshed in Abaqus for further analysisNote: you will need to use other DS tools such as SOLIDWORKS or CATIA for this conversionL3.32w w w .3d s .c o m | © D a s s a u l t S y s t èm e sPostprocessing (9/10)Optimization reportEnsure that the optimization constraints have been satisfied within toleranceOptimization_report.csv is created in the working directoryITERATION OBJECTIVE-1 OBJ_FUNC_DRESP:COMPLIANCE OBJ_FUNC_TERM:COMPLIANCE OPT-CONSTRAINT-1:EQ:VOL Norm-Values: 0.6456477 0.6456477 0.6456477 0.8000001 0 0.6456477 0.6456477 0.6456477 1 1 0.6497207 0.6497207 0.6497207 0.948712 2 0.6501995 0.6501995 0.6501995 0.9437472 3 0.6512569 0.6512569 0.6512569 0.93827784 0.6520502 0.6520502 0.6520502 0.9331822 0.6916615 0.6916615 0.6916615 0.831561823 0.6954725 0.6954725 0.6954725 0.8268944 24 0.7028578 0.7028578 0.7028578 0.8217635 25 0.8512989 0.8512989 0.8512989 0.8169149 26 0.7232164 0.7232164 0.7232164 0.8110763 27 0.7404507 0.7404507 0.7404507 0.8057563 28 0.7356095 0.7356095 0.7356095 0.8024307w w w .3d s .c o m | © D a s s a u l t S y s t èm e sHistory outputOptimization_report.csv should not be accessed while the optimization is running.Use the history output variables in Abaqus/CAE to monitor constraints and objectivesL3.34w w w .3d s .c o m | © D a s s a u l t S y s t èm e s1.In this workshop you will:a.become familiar with setting up, submitting and postprocessing a topology optimization problem with astamping geometric restrictionWorkshop 2a: Topology Optimization of a Cantilever Beam With Stamping Geometric RestrictionsL3.35w w w .3d s .c o m | © D a s s a u l t S y s t èm e s1.In this workshop you will:a.further explore demold control geometric restrictions, specifically with the central plane technique whichensures that the final design proposal is moldableWorkshop 2b: Topology Optimization of a Cantilever Beam With Demold Control Using the Central Plane Technique30 minutesL3.36w w w .3d s .c o m | © D a s s a u l t S y s t èm e s1.In this workshop you will:a.explore various symmetry restrictions available in the topology optimization modulee symmetry restrictions to create specific patterns in the design area as required for ease ofmanufacturing a particular componentWorkshop 2c: Topology Optimization of a Cantilever Beam With Symmetry Geometric Restrictions。
10.16638/ki.1671-7988.2021.04.015基于ABAQUS/CAE的某乘用车后下控制臂拓扑优化设计王振东1,李德淯2,伍初东1(1.湖南湖大艾盛汽车技术开发有限公司,湖南长沙410205;2.上汽通用五菱汽车股份有限公司,广西柳州545006)摘要:文章介绍了利用ABAQUS/CAE对某乘用车后下控制臂进行拓扑优化设计。
在通过模拟整车实际恶劣工况对其进行加载及约束,并结合ABAQUS/CAE中的优化模块下对控制臂进行拓扑优化参数设计,计算求解得出最优的减重方案,并提供给设计工程师对控制臂逆向建模。
最后对设计的新结构进行应力分析校核,校核结果显示优化后的新结构满足刚强度设计要求。
关键词:ABAQUS;控制臂;拓扑优化;轻量化;刚度中图分类号:U463 文献标识码:A 文章编号:1671-7988(2021)04-47-03Topology optimization design of a passenger vehicle rear lower controlarm based on ABAQUS/CAEWang Zhendong1, Li Deyu2, Wu Chudong1( 1.Hunan Huda Aisheng Automobile Technology Development Co., Ltd., Hunan Changsha 410205;2.SAIC-GM-Wuling Automobile Co., Ltd., Guangxi Liuzhou 545006 )Abstract: In this paper, ABAQUS/CAE will be used to optimize the topology design of the rear and lower control arm of a passenger car.In by simulating actual condition of the vehicle to load and constraints, combined with the optimization module of ABAQUS/CAE topology optimization parameter design for control arm, calculated to solve the optimal weight loss plan, and provide design engineers to control arm reverse modeling, and finally to design a new structure of the stress analysis and checking, to check whether meet the requirements of structural strength stiffness design.Keywords: ABAQUS; Control arm; Topology optimization; Lightweight; StiffnessCLC NO.: U463 Document Code: A Article ID: 1671-7988(2021)04-47-03引言拓扑优化技术作为以提高结构性能或减轻结构质量为目标的一种新型结构设计方法,目前已广泛在国内外汽车企业得到成功应用[1]。
Workshop 3Shape Optimization of a Plate with a Hole© Dassault Systèmes, 2012Topology and Shape Optimization in AbaqusIntroductionIn this workshop you will become familiar with the process of setting up, submitting, monitoring and postprocessing a shape optimization problem using Abaqus/CAE.A finite element model of a plate with a hole is provided (see Figure W3–1). You will import this model into Abaqus/CAE and then perform a shape optimization on it.Preliminaries1. Enter the working directory for this workshop:../atom/plate2. Start a new session of Abaqus/CAE using the following command:abaqus caewhere abaqus is the command used to run Abaqus.3. In the Start Session dialog box, underneath Create Model Database , click With Standard/Explicit Model .4. From the main menu bar, select File →Run Script .5. In the Run Script dialog box, select ws_atom_plate.py and click OK .6. A model named hole-plate-quarter will be created.Figure W3– 1 Quarter symmetry model of a plate with a hole.171Examining the finite element modelIn this finite element model we are interested in the static response of a plate with a hole tomultiple load cases. Taking advantage of symmetry, we construct only a quarter symmetrymodel. The model consists of the following:1.Parts: The model consists of a single part named PART–1.2.Mesh: The plate is meshed with CPS4 elements.3.Materials: Material properties of steel have been assigned to the plate.4.Steps: Two steps, one for each load case are specified. Nonlinear geometric effects areconsidered.5.Loads: Two loads of magnitude 200 and 100 are specified in the X- and Y-directions, inSteps 1 and 2, respectively. The loads are not propagated from one step to another; thus,they represent independent load cases.6.Boundary conditions: Symmetry boundary conditions are applied to appropriate edges.Before proceeding with the optimization analysis, examine the finite element model.To examine the finite element model:1. In the Model Tree, click to expand the model hole–plate–quarter as shown in FigureW3–2.2.Expand the following containers: Parts, Materials, Assembly, Steps, Loads and BCs.3.Right-click on each of the items in the containers and choose Edit from the menu thatappears.4.Click Cancel in order to avoid making changes to the analysis.Figure W3–2 Model Tree for quarter plate model.© Dassault Systèmes, 2012 Topology and Shape Optimization in Abaqus 172© Dassault Systèmes, 2012 Topology and Shape Optimization in AbaqusCreating and submitting an analysis job Once you have examined the model, you will submit an analysis job to ensure that the model runs without error and produces meaningful results.To create and submit an analysis job:1. Switch to the Job module.2. From the main menu bar, select Job →Manager .3. From the buttons on the bottom of the Job Manager , click Create to create a job.4. In the Create Job dialog box that appears:a. Name the job hole –plate –quarter and select the model hole –plate –quarteras the source; click Continue .5. In the Edit Job dialog box that appears, click OK to accept all defaults.6. From the buttons on the right side of the Job Manager , click Submit to submit your job for analysis. The status field will show Running . When the job completes successfully, the Status field will change to Completed as shown in Figure W3–3.Figure W3–3 Job Manager.7. In the Job Manager , click Results to postprocess the analysis results.8. In the Visualization toolbox, plot the Mises stress distribution for each of the load cases as shown in Figure W3–4.Figure W3–4 Contour plots of Mises stress.9. Return to the Job module and dismiss the Job Manager.173Defining a shape optimizationIn shape optimization, typically the goal is to homogenize the stress on the surface of acomponent by adjusting the surface nodes. Thus, the minimization is achieved byhomogenization. Shape optimization is not limited to minimizing stresses; it may be extended to plastic strains, natural frequencies, etc.In this workshop you will homogenize the Mises stress on the periphery of a hole in a plate. You will consider two load cases simultaneously, ensuring that the plate is equally stressed in bothload cases and therefore equally likely to fail (or survive) either load case.The workflow for shape optimization is exactly the same as that for topology optimization.Creating an optimization task:1.Switch to the Optimization module (Figure W3–5).Figure W3–5 Switching to the Optimization module.2.From the main menu bar, select Task→Create.3.In the Create Optimization Task dialog box that appears: the optimization task optimize-shape.b.Select Shape optimization as the type and click Continue.c.You will be prompted to select an optimization region.d.Select the set DESIGN_NODES, as shown in Figure W3–6.© Dassault Systèmes, 2012 Topology and Shape Optimization in Abaqus 174Figure W3–6 Selecting the optimization region.In shape optimization the design variables are the positions of the surface nodes; thus, the optimization region is always a set of nodes.Next, you will select and configure the optimization algorithm.In the Edit Optimization Task dialog box (Figure W3–7):1.In the Basic tabbed page, select Freeze boundary condition regions.2.Select Specify smoothing region, and select the whole model.3.Select Fix all as the Number of node layers adjoining the task region to remain free.4.In the Mesh Smoothing Quality tabbed page, set the Target mesh quality to Medium.5.Accept all defaults in the Advanced tabbed page.6.Click OK.© Dassault Systèmes, 2012 Topology and Shape Optimization in Abaqus175© Dassault Systèmes, 2012 Topology and Shape Optimization in AbaqusFigure W3–7 Optimization task editor.You have now configured the shape optimization algorithm. Next, you will define design responses.Creating design responses:1. From the main menu bar, select Design Response →Create .2. In the Create Design Response dialog box that appears:a. Name the design response Mises –Stress –step1.b. Accept Single-term as the type, and click Continue .c. You will be prompted to select the design response region type.d. In the prompt area, select Whole Model as the design response region.3. In the Edit Design Response dialog box that appears (Figure W3–8):a. In the Variable tabbed page, select Stress and Mises hypothesis .b. Note that the field Operator on values in region is set to Maximum value bydefault.c. Switch to the Steps tabbed page, select Specify and click to add a step.d. Select Step-1 from the Step and Load Case drop-down list.e. Click OKto create the design response.176© Dassault Systèmes, 2012 Topology and Shape Optimization in AbaqusFigure W3–8 Design response for the strain energy.4. Similarly, define a design response for Step –2.a. Name the design response Mises –Stress –step2.5. Similarly, define a design response for the volume (see Figure W3–9).a. Name the design response Volume .Figure W3–9 Design response for the volume.177© Dassault Systèmes, 2012 Topology and Shape Optimization in AbaqusNext, you will create an objective function. Creating an objective function:1. From the main menu bar, select Objective Function→Create .2. In the Create Objective Function dialog box that appears:a. Name the objective function optimize-shape and click Continue .3. In the Edit Objective Function dialog box that appears (Figure W3–10):a. Click to add all design responses eligible to participate in an objectivefunction.b. Leave the Reference Target field at the Default setting.c. Change the Target to Minimize the maximum design response values .d. Click OK .Figure W3–10 Objective function optimize-shape .Next, you will create a volume constraint.The purpose of creating volume constraints in a shape optimization is to ensure that the overall volume of the component remains the same. In most cases it is undesirable to simply addmaterial to reduce stress. Rather, material is redistributed to minimize stress. Volume constraints ensure that either no material is added or very little material is added as a result of the shape optimization.Creating a constraint:1. From the main menu bar, select Constraint →Creat e .2. In the Create Constraint dialog box that appears:a. Name the constraint volume-constraint and click Continue .3. In the Edit Optimization Constraint dialog that appears (Figure W3–11):a. Click the drop-down menu for the Design Response , and select Volume .b. Toggle on A fraction of the initial value and enter 1.c. Click OKto create the optimization constraint for volume.178Figure W3–11 Optimization constraint on volume.The setup of the optimization task is now complete. Next, you will create and submit an optimization process.Creating an optimization process:1.Switch to the Job module.2.From the main menu bar, select Optimization→Create.3.In the Edit Optimization Process dialog box that appears (Figure W3–12): the optimization process optimize-shape.b.In the Description field of the dialog box, enter shape optimization.c.Note the Maximum cycles field is set to 10 by default for shape optimization.d.Click OK.Figure W3–12 Edit optimization process.© Dassault Systèmes, 2012 Topology and Shape Optimization in Abaqus179Submitting an optimization process:1.From the main menu bar, select Optimization→Manager.2.From the buttons on the right side of the Optimization Process Manager, click Validateto validate the optimization process.a.When the validation process completes successfully, the Status field will changeto Check Completed.3.Click Submit in the Optimization Process Manager.4.Once the Status changes to Running,click Monitor if you wish to monitor the progressof the optimization process.Postprocessing shape optimization resultsYou may postprocess the solution when the optimization process is complete.Opening the Abaqus output database file:1.Click Results in the Optimization Process Manager.Note that the Abaqus output database file is stored in the folder named ATOM_POST. Allsolution folders generated by ATOM have the structure shown in Figure W3–13.The .odb file stored in the folder ATOM_POST contains the optimization results. Note thatthe history data available for optimization are also available inoptimization_report.csv. You may access this file after the optimization is completebut not during it. Abaqus will stop writing to the file if it is opened during the run. Thefolders SAVE.dat, SAVE.inp, etc. are archives of the Abaqus runs that were performed bythe optimizer. The file atom.out contains the output log from the optimizer.Figure W3–13 File structure from an optimization run.© Dassault Systèmes, 2012 Topology and Shape Optimization in Abaqus 180Contour plotting the shape change:1.From the main menu bar, select Result→Step/Frame.a.From the Step/Frame dialog box, select the ATOM OPTIMIZATION step.b.Select Frame10 (or the highest iteration available to you) from the list ofavailable frames.c.Click OK to close the Step/Frame dialog box.d.In the Visualization toolbox, click and set the Deformation Scale Factor to1.e.In the Field Output toolbar:i. Set the Primary variable to DISP_OPT _VAL.ii.Set the Deformed variable to DISP_OPT.f.In the Visualization toolbox, click and hold .g.Select the last icon to plot contours on both the deformed and undeformedshapes.The contour plot of the deformed shape overlaid on the undeformed shape after 10iterations appears as shown in Figure W3–14. The figure shows the displacementsapplied by the optimizer (shape change) as a scalar. Growth is visualized in red whileshrinkage is visualized in blue. This plot provides an understanding of where themodel is shrinking and where it is growing. Recall that the volume was constrained toremain constant; thus, the growth and shrinkage balance each other. The plot alsoshows that the mesh in the interior moves as a result of the smoothing that wasapplied.Figure W3–14 Contour plot of DISP_OPT_VAL at 10 cycles.© Dassault Systèmes, 2012 Topology and Shape Optimization in Abaqus181Figure W3–15 shows the results after 150 iterations. As seen in the two figures, the difference in the peak values of DISP_OPT_VAL between the two jobs is not large. This implies that theshape optimization only made minor corrections to the shape between iterations 10 and 150.Figure W3–15 Contour plot of DISP_OPT_VAL at 150 cycles.While creating the objective function we had chosen to minimize the maximum design response values. The formulation finds the maximum objective function term and seeks to minimize itduring each design iteration. Given that the optimizer employs a large number of iterations, it is expected that the objective function terms will be more or less equal in magnitude at end of theoptimization. In this example, the stress due to the load in steps 1 and 2 is more or less equalafter the shape optimization. Thus, the plate is not more likely to fail in one load case versus the other.© Dassault Systèmes, 2012 Topology and Shape Optimization in Abaqus 182Plot the Mises stress and compare the peak stress from each of the load cases.Plotting the Mises stress:1.From the main menu bar, select Result→Step/Frame.a.From the Step/Frame dialog box, select step Step-1_Optimization.b.Select Frame10 from the list of available frames.c.Click OK to close the Step/Frame dialog box.d.In the Visualization toolbox, click and set the Deformation Scale Factor to300.e.In the Field Output toolbar:i. Set the Primary variable to S (Int Pt) and select Mises as the component.ii.Set the Deformed variable to U.f.In the Visualization toolbox, click to plot contours on both the deformed andundeformed shapes.g.Repeat steps a-f for Step-2_Optimization.The results are shown in Figure W3–16 (a and b). Note the significant differencebetween the peak values of Mises stress after 10 iterations. This is a strong indicationthat the MIN_MAX formulation needs more iterations to achieve its goal.Figure W3–16 (c and d) shows the results from a solution that was allowed to run for150 iterations. The difference in the peak stresses is now significantly reduced.© Dassault Systèmes, 2012 Topology and Shape Optimization in Abaqus183a.Mises stress Step-1 at 10 cycles.b. Mises stress Step-2 at 10 cycles.c.Mises stress Step-1 at 150 cycles.d. Mises stress Step-2 at 150 cycles.Figure W3–16 Contour plots of Mises stress.© Dassault Systèmes, 2012 Topology and Shape Optimization in Abaqus 184Plot the history output for variables OBJ_FUNCTION_DRESP: MISES-STRESS-STEP1 andOBJ_FUNCTION_DRESP:MISES-STRESS-STEP2. Compare the magnitudes, as shown inFigure W3–17.To plot history output:1.From the main menu bar, select Result→History Output.2.From the History Output dialog box that appears, select the ATOM OptimizationHistory variables.3.Click Plot to plot the selected variables.4.Click Dismiss to dismiss the dialog box.The red arrow in Figure W3–17 indicates the results obtained in 10 iterations. Clearly 10iterations were not sufficient for the optimization process to converge.Figure W3–17 History plots.© Dassault Systèmes, 2012 Topology and Shape Optimization in Abaqus185Finally, it is important to clarify that the MIN_MAX formulation may result in the increase insome objective function terms as it operates on others, even though a minimization wasspecified. In Figure W3–17 we see that during the first 60 iterations the peak Mises stress forStep-1 reduces while the peak Mises stress for Step-2 increases. The increase in peak Misesstress for Step-2 is nothing more than an unavoidable side effect of the shape change that wasdriven by Step-1 (the Mises stress in Step-1 was greater during the first 60 iterations). Atapproximately the 60th iteration, Step-2 begins to dominate the shape change and the Mises stress for Step-2 begins to reduce. Fortunately, the subsequent shape changes do not adversely affectthe Mises stress in Step-1.Note: A script that creates the model described in these instructions is availablefor your convenience. Run this script if you encounter difficulties following theinstructions outlined here or if you wish to check your work. The script is named ws_atom_plate_answer.pyand is available using the Abaqus fetch utility.© Dassault Systèmes, 2012 Topology and Shape Optimization in Abaqus 186。
ABAQUS个人报告——简化悬臂梁实例分析悬臂梁是工程中常见静定梁的基本形式。
实际工程中,梁的受力和支座约束的情况都比较复杂。
为了便于分析和计算,需要对实际结构进行简化,简化内容包括梁的结构、支座和荷载等三个方面,例如悬挑梁可简化成悬臂梁模型,并由此可得梁的计算简图。
由于悬臂梁属于静定结构,因此体系的温度变化、混凝土收缩徐变、支座移动等只会使悬臂梁出现变形,但是不会在悬臂梁中产生附加内力,个人报告中将对悬臂梁进行实例分析。
一、部件首先创建:三维、可变形、实体,类型为拉伸,草图为边长0.2的正方形,长度拉伸为3;三维部件二、属性1、创建材料:定义材料属性为:力学-弹性-弹性,输入杨氏模量210GP、泊松比为0.33;其它参数不需进行设置。
2、创建截面:选择剖面—创建截面(均质、实体);3、将创建的截面赋予给材料:指派—截面—选中悬臂梁,将创建的截面赋予给材料本身。
材料颜色会变为青绿色(如下图):三、分析步创建:静力、通用分析步,打开几何非线性,将增量设为自动,最大增量步数为1000,增量步大小初始和最大均改为0.01;四、载荷1、边界条件—创建,静力通用,左边创建一个完全固定边界条件(U1=U2=U3=UR1=UR2=UR3=0)如下图:2、右边创建位移、转角边界条件;创建之前建立参考点,为右边下部中间点,为简化方便,可将力加到此点处,将参考点与右侧面约束为耦合。
边界条件具体参数如下图:五、网格1、为部件进行布种操作,近似全局尺寸为0.05;2、单元类型为:二次,缩减积分(C3D20R:二十结点二次六面体单元,减缩积分)划分网格完成如下图:六、作业创建作业,xuanbuliang,可以更改内存,运行处理最大内存,和运行CPU数量,加快abaqus的分析计算;对数据进行提交,等待分析结果。
七、可视化将计算结果进行观察,如下图:由于前方将x、z轴固定,中间部分发生弯曲,与实际不符,考虑到为边界条件的影响。
Abaqus 课程报告___ 悬臂梁悬冃梁一、问题描述分析悬臂梁悬臂梁简图如下,它由钢材制成,400mm 长,具有40mm x 60mm 的横截面。
钢的弹性模量为200GPa,泊松比为0.3除了以上数据外,载荷位置,方向和大小也已标示在上图中;再无其它可利用的数据。
要求:分析完成后要求写出完整的分析报告,分析报告包括模型,分析,分析结果的述,对模型、分析和分析结果的讨论以及结论这样几个部分。
讨论中的问题论述要求有文献证据和直接证据,可能在报告的最后部分要附上参考文献。
讨论中要包括理论解,模型的误差,分析的误差,不同分析方案的比较(如果有不同的 分析方案的话)。
使用不同的单元,(如梁单元 B21、B31、B22和B32;实体 单元 C3D8、C3D8R 、C3D20、C3D20R 、C3D8I 、C3D8H 、C3D8RH 和C3D20RH )和不同的单元划分等等对问题进行分析和比较。
:、模型建立与求解l. part针对该悬臂梁模型,拟定使用3D 实体梁单元。
挤压成型方式2. 材料属性材料为钢材,弹性模量200Gpa ,泊松比0.33. 截面属性截面类型定义为 solid ,homogeneoushame : BeamModeling□ 3D 2D Planar Axisymnnetrrc Type Opticus 0 Deformable i Discrete rigidINone available ■'") Anatytkal rigid Eulerian[cancei --- !4. 组装在本例中只有一个装配部件,组装时即可选择independent ,也可选择dependent 的方式。
5. 建立分析步在对模型施加荷载和边界条件之前或者定义模型的接触问题之前,必须定义分析步。
然后可以指定在哪一步施加荷载,在哪一步施加边界条件,哪一步去定相互关联。
ABAQUS的各种载荷要分别加载在不同的分析步中,比如像竖向载荷、偏转角度、水平载荷要分别建立三个载荷步。