拓扑优化实例
- 格式:ppt
- 大小:384.50 KB
- 文档页数:9
网络工程师的网络拓扑优化案例在今天的数字化时代,网络已经成为了企业和个人生活中不可或缺的一部分。
网络的稳定性和高效性对于任何一个组织或个人来说都至关重要。
作为一名网络工程师,网络拓扑优化是我们日常工作中的一项重要任务。
本文将通过一个真实案例,详细介绍网络工程师如何进行网络拓扑优化,以提供更好的网络服务。
案例背景介绍:某公司是一家中型企业,拥有几个办公地点,不同地点的员工需要随时共享文件和资源。
然而,公司目前的网络拓扑结构并不理想,经常出现网络拥堵和延迟问题,导致员工工作效率低下,数据传输速度慢,访问互联网的体验也欠佳。
因此,该公司雇佣了一位网络工程师来优化网络拓扑,提升网络性能。
I. 现状分析首先,作为一名网络工程师,我们需要分析当前的网络拓扑结构,了解存在的问题和瓶颈。
通过对该公司各个办公地点的网络设备、布线、带宽等进行全面检查,并利用网络性能监测工具收集数据,我们可以得出以下结论:1. 网络拓扑结构复杂:当前使用了星型和总线型两种拓扑结构,设备连接不够合理,容易引发网络拥堵。
2. 带宽不足:某些关键设备带宽不够大,无法满足高速数据传输的需求。
3. 网络设备老旧:某些交换机和路由器已经使用多年,性能逐渐下降,需要进行更新和升级。
4. 安全性较低:缺乏有效的网络安全防护措施,存在安全隐患。
II. 优化方案基于对网络现状的分析,我们提出以下优化方案,并根据实际情况进行相应调整和部署。
1. 网络拓扑重新设计:根据企业的需求,选择合适的网络拓扑结构。
经过评估,我们决定采用树状拓扑结构,以提高网络的可扩展性和稳定性。
同时,我们会合理规划设备布局,减少冗余线缆。
2. 带宽优化:针对关键设备,对其带宽进行提升。
通过增加链路带宽,使得数据传输更加快速和稳定。
3. 设备升级:对老旧的交换机和路由器进行更新和升级。
引入新一代设备,提高性能和稳定性,并提供更多的管理和监控功能。
4. 网络安全加固:通过部署防火墙、入侵检测系统和访问控制策略等安全措施,提高网络的安全性和可靠性,保护企业的敏感数据。

Workbench拓扑优化实例1. 引言拓扑优化是指在工作台(Workbench)中对网络拓扑进行调整和优化,以提高网络的性能和可靠性。
本文将以一个实例来说明如何通过工作台拓扑优化来改善网络性能。
2. 实例描述假设我们有一个大型企业网络,包含多个办公楼和数据中心,总共有1000台计算机和50个服务器。
目前的网络拓扑如下所示:从拓扑图中可以看出,所有的计算机都连接到一个核心交换机,而服务器则连接到两个核心交换机。
此外,每个办公楼都有一个分布式交换机,用于连接该楼层的计算机和服务器。
3. 问题分析通过对当前拓扑的分析,我们可以发现以下问题:•网络中存在单点故障,如果核心交换机出现故障,整个网络将无法正常工作。
•数据中心的服务器连接到两个核心交换机,但并没有实现负载均衡,导致部分服务器的带宽未能充分利用。
•办公楼的分布式交换机数量较少,可能无法满足日益增长的网络流量需求。
基于以上问题,我们需要对网络拓扑进行优化,以提高网络的性能和可靠性。
4. 拓扑优化方案基于以上问题分析,我们提出以下拓扑优化方案:4.1 引入冗余设备为了解决单点故障问题,我们可以引入冗余设备,例如增加一个备用核心交换机。
在正常情况下,备用交换机处于备用状态,不参与数据传输。
只有当主交换机发生故障时,备用交换机才会自动接管其功能,保证网络的连通性。
4.2 实现负载均衡为了充分利用服务器的带宽,我们可以实现负载均衡。
具体做法是将服务器连接到一个负载均衡器,再将负载均衡器连接到两个核心交换机。
负载均衡器可以根据服务器的负载情况,将请求分发到不同的服务器上,以实现带宽的均衡利用。
4.3 增加分布式交换机为了满足日益增长的网络流量需求,我们可以增加办公楼的分布式交换机数量。
具体做法是在每个办公楼中增加一个分布式交换机,并将该楼层的计算机和服务器连接到该交换机上。
这样可以减少网络流量的跨楼层传输,提高网络的性能。
5. 实施计划为了顺利实施拓扑优化方案,我们制定了以下实施计划:1.部署备用核心交换机:购买一台备用核心交换机,并进行相应的配置和测试。
拓扑结构优化实例
拓扑结构优化是一种通过改变物体的形状、材料和结构来优化其性能和效率的方法。
在本文中,我们将介绍几个拓扑结构优化的实例,包括:
1. 汽车座椅的结构优化:通过对汽车座椅的结构进行优化,可以提高座椅的承重能力、舒适性和安全性。
这种优化方法可以通过计算机辅助设计软件来实现。
2. 飞机机翼的结构优化:通过改变机翼的形状和材料,可以减少飞机的重量,提高其飞行效率和稳定性。
这种优化方法需要进行复杂的数值模拟和实验验证。
3. 建筑结构的优化:通过改变建筑物的结构和材料,可以减少建筑的成本、提高其安全性和耐用性。
这种优化方法需要考虑建筑物的设计、施工和使用过程中的各种因素。
拓扑结构优化可以应用于各种领域,包括机械、航空航天、建筑、医疗器械等。
它是一种强大的工具,可以帮助人们设计出更加优秀和高效的产品和设备。
- 1 -。
拓扑优化是指形状优化,有时也称为外型优化。
拓扑优化的目标是寻找承受单载荷或多载荷的物体的最佳材料分配方案。
这种方案在拓扑优化中表现为“最大刚度”设计。
与传统的优化设计不同的是,拓扑优化不需要给出参数和优化变量的定义。
目标函数、状态变量和设计变量(参见“优化设计”一章)都是预定义好的。
用户只需要给出结构的参数(材料特性、模型、载荷等)和要省去的材料百分比。
给每个有限元的单元赋予内部伪密度来实现。
这些伪密度用PLNSOL ,TOPO 命令来绘出。
拓扑优化的目标——目标函数——是在满足结构的约束(V )情况下减少结构的变形能。
减小结构的变形能相当于提高结构的刚度。
这个技术通过使用设计变量。
结构拓扑优化的基本思想是将寻求结构的最优拓扑问题转化为在给定的设计区域内寻求最优材料分布的问题。
通过拓扑优化分析,设计人员可以全面了解产品的结构和功能特征,可以有针对性地对总体结构和具体结构进行设计。
特别在产品设计初期,仅凭经验和想象进行零部件的设计是不够的。
只有在适当的约束条件下,充分利用拓扑优化技术进行分析,并结合丰富的设计经验,才能设计出满足最佳技术条件和工艺条件的产品。
连续体结构拓扑优化的最大优点是能在不知道结构拓扑形状的前提下,根据已知边界条件和载荷条件确定出较合理的结构形式,它不涉及具体结构尺寸设计,但可以提出最佳设计方案。
拓扑优化技术可以为设计人员提供全新的设计和最优的材料分布方案。
拓扑优化基于概念设计的思想,作为结果的设计空间需要被反馈给设计人员并做出适当的修改。
最优的设计往往比概念设计的方案结构更轻,而性能更佳。
经过设计人员修改过的设计方案可以再经过形状和尺寸优化得到更好的方案。
5.1.2优化拓扑的数学模型优化拓扑的数学解释可以转换为寻求最优解的过程,对于他的描述是:给定系统描述和目标函数,选取一组设计变量及其范围,求设计变量的值,使得目标函数最小(或者最大)。
一种典型的数学表达式为:()()()12,,0,,0min ,g x x v g x x v f x v ⎧=⎪⎪≤⎨⎪⎪⎩&& 式中,x -系统的状态变量;12g g 、-一等式和不等式的结束方程;(),f x v -目标函数;v -设计变量。
拓扑优化知识点总结一、拓扑优化概述1.1 拓扑优化的基本概念拓扑优化是指在给定的网络拓扑结构下,通过对网络中的节点和链接进行调整和改进,以提高网络的性能、可靠性、效率和安全性。
拓扑优化可以分为静态优化和动态优化两类。
静态优化是指在网络设计和规划阶段对网络拓扑结构进行优化,以满足用户的需求和网络的性能指标;动态优化是指在网络运行和管理阶段对网络拓扑结构进行优化,以适应网络的变化和故障的发生。
1.2 拓扑优化的目标和原则拓扑优化的目标是提高网络的性能、可靠性、效率和安全性,以满足用户的需求和网络的性能指标。
拓扑优化的原则是综合考虑网络的各种因素和要求,采用合适的技术和方法,对网络中的节点和链接进行合理的调整和改进,以达到最佳的优化效果。
1.3 拓扑优化的应用领域拓扑优化的应用领域包括电信网络、互联网、数据中心网络、无线传感网络、工业控制网络、智能交通网络、智能电网等。
在这些领域中,拓扑优化可以提高网络的通信质量和数据传输速度,降低网络的能耗和成本,增强网络的安全性和可靠性,满足不同应用的需求。
二、拓扑优化的关键技术2.1 拓扑建模和分析技术拓扑建模和分析是拓扑优化的基础技术,它包括网络结构的建模和描述、网络性能的分析和评估、网络需求的分析和预测等。
在拓扑建模和分析中,可以采用图论、随机过程、优化理论、仿真技术等方法,对网络的结构和性能进行定量和定性的分析,为拓扑优化提供依据和支持。
2.2 拓扑设计和规划技术拓扑设计和规划是拓扑优化的关键技术,它包括网络结构的设计和选址、网络性能的规划和配置、网络需求的匹配和布线等。
在拓扑设计和规划中,可以采用网络优化、组合优化、整数规划、图算法等方法,设计和规划出满足用户需求和网络性能指标的网络拓扑结构。
2.3 拓扑配置和管理技术拓扑配置和管理是拓扑优化的关键技术,它包括网络结构的配置和部署、网络性能的管理和监控、网络需求的调整和协调等。
在拓扑配置和管理中,可以采用网络配置、网络控制、网络优化、网络监控等方法,对网络的结构和性能进行调整和改进,以适应网络的变化和故障的发生。
第19章拓扑优化技术第1节基本知识一、拓扑优化的概念拓扑优化是指形状优化,有时也称为外型优化。
拓扑优化的目标是寻找承受单载荷或多载荷的物体的最佳材料分配方案。
这种方案在拓扑优化中表现为“最大刚度”设计。
与传统的优化设计不同的是,拓扑优化不需要给出参数和优化变量的定义。
目标函数、状态变量和设计变量都是预定义好的。
用户只需要给出结构的参数(材料特性、模型、载荷等)和要省去的材料百分比。
拓扑优化的目标—目标函数—是在满足结构的约束(V)情况下减少结构的变形能。
减小结构的变形能相当于提高结构的刚度。
这个技术通过使用设计变量( i)给每个有限元的单元赋予内部伪密度来实现。
这些伪密度用PLNSOL,TOPO命令来绘出。
ANSYS提供的拓扑优化技术主要用于确定系统的最佳几何形状,其原理是系统材料发挥最大利用率,同时确保系统的整体刚度(静力分析)、自振频率(模态分析)在满足工程要求的条件下获得极大或极小值。
拓扑优化应用场合:线性静力分析和模态分析。
拓扑优化原理:满足结构体积缩减量的条件下使目标函数结构柔量能量(the enery of structure compliance—SCOMP)的极小化。
结构柔量能量极小化就是要求结构刚度的最大化。
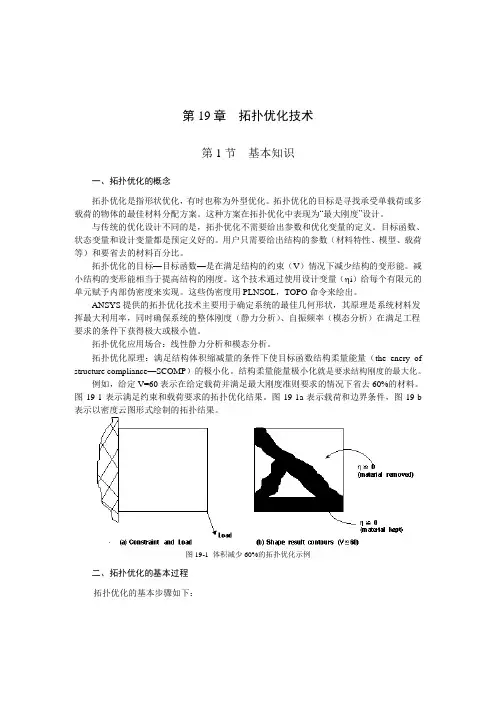
例如,给定V=60表示在给定载荷并满足最大刚度准则要求的情况下省去60%的材料。
图19-1表示满足约束和载荷要求的拓扑优化结果。
图19-1a表示载荷和边界条件,图19-b 表示以密度云图形式绘制的拓扑结果。
图19-1 体积减少60%的拓扑优化示例二、拓扑优化的基本过程拓扑优化的基本步骤如下:1.定义结构问题定义材料弹性模量、泊松系数、材料密度。
2.选择单元类型拓扑优化功能中的模型只能采用下列单元类型:● 二维实体单元:Plane2和Plane82,用于平面应力问题和轴对称问题。
● 三维实体单元:Solid92、Solid95。
● 壳单元:SHELL93。
3.指定优化和不优化区域ANSYS只对单元类型编号为1的单元网格部分进行拓扑优化,而对单元类型编号大于1的单元网格部分不进行拓扑优化,因此,拓扑优化时要确保进行拓扑优化区域单元类型编号为1,而不进行拓扑优化区域单元类型编号大于1即可。
![[复习]ansys拓扑优化形状优化实例1](https://uimg.taocdn.com/48322ed6e109581b6bd97f19227916888486b9e3.webp)
[复习]ansys拓扑优化形状优化实例1 ansys拓扑优化形状优化实例1FINISH/CLEAR,START/TRIAD,OFF !关闭整体直角坐标系的三角符号 H=1000 !设置比例尺,采用iso TK16=6.35/H !设置参数变量并附初值 TK27=6.35/HTK38=6.35/HTK49=6.35/HTK50=4/H/PREP7ET,1,PLANE42MP,EX,1,6.89E10MP,NUXY,1,0.3K,1K,5,254/HKFILL ! 在第1至第5个关键点之间生成2,3,4关键点K,6,,TK16K,7,63.5/H,TK27K,8,127/H,TK38K,9,190.5/H,TK49K,10,254/H,TK50SPLINE,6,7,8,9,10L,1,6*REPEAT,5,1,1 !重复L命令,关键点编号自动加1,分别在2,7、3,8、4,9、5,10之间共生成4条线其中包含了、命令已生成的线,共5条LSEL,S,LINE,,5,9 !选择上述生成的5条线 LESIZE,ALL,,,1 !指定线在划分网格前的等分数为1 LSEL,ALLA,1,2,7,6*REPEAT,4,1,1,1,1 !重复上述命令,共生成4个面ESIZE,,4AMESH,ALLFINISH/SOLUNSEL,S,LOC,YDSYM,SYMM,X !对选择的节点施加x方向的对称约束NSEL,S,LOC,XDSYM,ASYM,Y !对选择的节点施加x方向的反对称约束NSEL,ALLFK,10,FX,66725*4 !在10号关键点施加集中载荷,实现弯矩DK,1,ALL,0 !在1号关键点施加全约束 SOLVEFINISH/POST1SET,LASTETABLE,EVOL,VOLU !建立单元表,并取出每个单元的体积EVOL=每个单元的体积PRNSOL,S,PRIN !列出节点的主应力 NSORT,S,1NSEL,U,LOC,X,0,230/H !选择介于0到230/H的节点*GET,STRS,SORT,,MAX !取出最大的应力值并赋给strsNSEL,ALLSSUM !体积相加*get,TVOL,ssum,,item,EVOL !取出结构总体积 TVOL=TVOL*2 !由于分析时只计算了结构的一半,总体积要乘2NSEL,U,LOC,X,250/H,265/H !选择介于250/H到265/H的节点PRNSOL,U,Y !列表显示出所选节点在y向的位移值 NSORT,U,Y,,1 !位移值升序排列PRNSOL,U,Y !列出排序后的结果*GET,DEFL,SORT,,MAX !取出最大的位移值赋给defl *STATUS,PARM !显示当前参数变量的状态值 DEFL=ABS(DEFL)DIF1=TK16-TK27 !设置参数值,以保证曲线的光滑性DIF2=TK27-TK38DIF3=TK38-TK49FINISHlgwrite,scratch,lgw/OPTopanl,scratch,lgw !指定分析文件 opvar,TVOL,Obj,,,1/H !定义优化目标函数,收敛误差为1,结构总体积TVOL为目标函数opvar,STRS,sv,,206E6 ! 定义状态变量即优化过程的约束条件opvar,DEFL,sv,,12.5/H opvar,DIF1,sv,,1/Hopvar,DIF2,sv,,1/Hopvar,DIF3,sv,,1/Hopvar,TK16,dv,4/H,7/H !定义第一个设计变量及其变化范围opvar,TK27,dv,4/H,7/Hopvar,TK38,dv,4/H,7/Hopvar,TK49,dv,4/H,7/Hopsave,INITIAL,opt !保存所有的优化数据到文件optp里optype,SUBP !设置优化方式,子问题逼近算法OPSUBP,30 !指定迭代次数opexe ! 执行优化 PARSAV,,RSET1 !将参数的值输出到文件中且文件名为rset1oplist,all,,1 !列表显示所有序列/AXLAB,Y,TVOL !设置曲线输出时y轴的说明 plvaropt,TVOL !绘图显示目标函数随优化次数的变化规律FINISH/POST1PLNSOL,U,SUM,0,1 !显示结构在优化后的总位移分布PLNSOL,S,EQV,0,1 !显示结构在优化后的应力分布 FINISH。
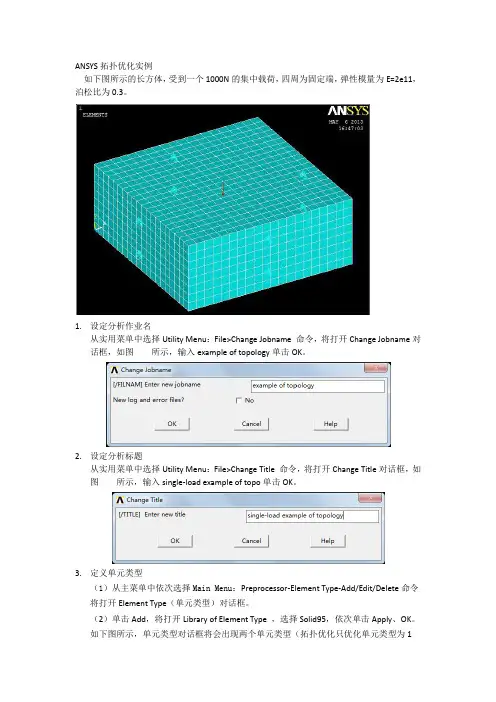
ANSYS拓扑优化实例如下图所示的长方体,受到一个1000N的集中载荷,四周为固定端,弹性模量为E=2e11,泊松比为0.3。
1.设定分析作业名从实用菜单中选择Utility Menu:File>Change Jobname 命令,将打开Change Jobname对话框,如图所示,输入example of topology单击OK。
2.设定分析标题从实用菜单中选择Utility Menu:File>Change Title 命令,将打开Change Title对话框,如图所示,输入single-load example of topo单击OK。
3.定义单元类型(1)从主菜单中依次选择Main Menu:Preprocessor-Element Type-Add/Edit/Delete命令将打开Element Type(单元类型)对话框。
(2)单击Add,将打开Library of Element Type ,选择Solid95,依次单击Apply、OK。
如下图所示,单元类型对话框将会出现两个单元类型(拓扑优化只优化单元类型为1(Type1)的部分)。
(3)单击Close,完成设置。
4.定义材料属性(1)从主菜单中选择Main Menu:Preprocessor-Material Props-Material Models将打开Define Material Model Behavior(定义材料属性)窗口,左窗口Material Model Number 1。
(2)依次在右窗口双击Structural>Linear>Elastic>Isotropic,给出弹性模量EX=2e11和泊松比PRXY=0.3。
(3)单击OK回到Define Material Model Behavior(定义材料属性)窗口,关闭窗口完成设置。
5.创建几何模型由于体的一部分不作优化,所以划分网格时,会要求不同部分选择不同的单元类型。
铁路货车转向架摇枕结构拓扑优化设计铁路货车在现代货物运输中扮演着至关重要的角色,而转向架作为其关键部件之一,直接影响着货车的运行性能和安全性。
其中,摇枕的结构设计对于转向架的整体性能有着重要影响。
为了提高铁路货车的运行效率、降低维护成本并增强安全性,对转向架摇枕进行结构拓扑优化设计具有重要意义。
一、铁路货车转向架摇枕的作用与要求摇枕是铁路货车转向架中的重要承载部件,它主要承受着来自车体的垂向载荷、纵向冲击力以及横向作用力,并将这些载荷传递给转向架的其他部件。
因此,摇枕需要具备足够的强度和刚度,以保证在复杂的载荷条件下不发生变形或损坏。
同时,为了减轻车辆的自重,提高运输效率,摇枕的结构应尽可能轻巧。
这就要求在设计过程中,在满足强度和刚度要求的前提下,对摇枕的结构进行优化,以达到轻量化的目的。
二、传统转向架摇枕结构设计的局限性在传统的转向架摇枕结构设计中,通常采用经验设计和类比设计的方法。
设计人员根据以往的设计经验和类似产品的结构形式,初步确定摇枕的结构尺寸和形状。
然后,通过有限元分析等手段对设计方案进行验证和改进。
然而,这种设计方法存在一定的局限性。
首先,由于依赖经验和类比,设计方案可能不是最优的,存在材料浪费和性能不足的问题。
其次,在设计过程中,往往需要进行多次反复的修改和验证,导致设计周期较长,成本较高。
三、拓扑优化设计的基本原理拓扑优化设计是一种基于数学优化理论的先进设计方法,它通过在给定的设计空间内寻找最优的材料分布形式,从而实现结构的轻量化和性能的优化。
在拓扑优化过程中,通常将设计空间离散化为大量的单元,并定义单元的材料属性(如存在或不存在)为设计变量。
然后,根据设定的目标函数(如最小化结构质量、最大化结构刚度等)和约束条件(如强度、位移等限制),通过优化算法对设计变量进行迭代计算,最终得到最优的材料分布形式。
四、铁路货车转向架摇枕拓扑优化设计的流程1、建立初始模型首先,根据转向架的整体结构和摇枕的安装位置,建立摇枕的初始几何模型。
单目标优化方法拓扑单目标优化方法:探索拓扑的应用在工程、科学研究和现实生活中,我们经常面临优化问题。
单目标优化是其中的一个重要分支,旨在寻找一个最优解以使某一目标达到最佳状态。
而拓扑作为一种数学工具,在单目标优化方法中扮演着关键角色。
本文将详细介绍单目标优化方法中拓扑的应用。
一、单目标优化概述单目标优化问题可以定义为:在给定的约束条件下,寻找一个决策变量,使得目标函数达到最小(或最大)值。
简单地说,就是寻找一个最优解,使得某一指标达到最优。
二、拓扑在单目标优化中的应用1.连续优化问题在连续优化问题中,拓扑方法可以帮助我们更好地理解目标函数的几何结构,从而为优化算法的设计提供理论依据。
例如,梯度下降法、牛顿法等优化算法都是基于目标函数的局部几何特性进行设计的。
2.离散优化问题对于离散优化问题,拓扑方法同样具有重要意义。
例如,在图论中,拓扑结构可以帮助我们描述和分析网络的最短路径、最小生成树等问题。
这些问题的解决方法往往依赖于拓扑性质,如连通性、度数等。
3.混合型优化问题对于同时包含连续和离散变量的优化问题,拓扑方法可以帮助我们构建有效的优化算法。
例如,遗传算法、粒子群优化算法等智能优化方法,都可以通过拓扑结构来描述搜索空间,从而提高搜索效率。
4.多尺度优化问题在多尺度优化问题中,拓扑方法可以用来分析目标函数在不同尺度下的性质。
这有助于我们设计多尺度优化算法,以适应不同尺度下的优化需求。
三、拓扑优化方法的应用实例以下是一个简单的拓扑优化应用实例:假设我们有一个电路设计问题,目标是在给定电路性能指标的情况下,最小化电路的面积。
我们可以将电路中的元件和连接关系表示为一个图,图的节点表示元件,边表示连接关系。
通过分析图的拓扑结构,我们可以找到一种布局方式,使得电路面积最小。
总结:拓扑方法在单目标优化问题中具有广泛的应用,可以帮助我们更好地理解优化问题的结构,为设计高效优化算法提供理论依据。
拓扑优化案例
在数学中,拓扑学是研究空间及其变换的学科。
在实际应用中,拓扑学可以应用于优化问题中。
下面我们将介绍几个拓扑优化的案例。
1. 空气动力学中的拓扑优化
在空气动力学中,拓扑优化可以用来优化飞行器的外形,以减少空气阻力和提高飞行效率。
通过对飞行器外形进行拓扑优化,可以得到一些非常优秀的设计方案,可以显著降低空气阻力,减少能源消耗。
2. 机器人路径规划中的拓扑优化
在机器人路径规划中,拓扑优化可以用来寻找最优路径。
通过对机器人空间进行拓扑分析,可以得到一些关键点和路径,使得机器人在规定的时间内完成任务,同时减少机器人的移动时间和能耗。
3. 计算机网络中的拓扑优化
在计算机网络中,拓扑优化可以用来优化网络的连接方式和带宽分配。
通过对网络拓扑结构进行分析和优化,可以实现更高效的数据传输和更好的网络性能。
总之,拓扑优化在不同领域都有广泛的应用,可以帮助我们寻找最优设计方案,提高效率和降低成本。
- 1 -。
㓳Ґа˖⊭䖖 㟲Ⲵᾲ 䇮䇑˄OS2010˅㾱≲ ⭘OptiStructs Ո 㜭 ⊭䖖 㟲䘋㹼ᾲ 䇮䇑ˈՈ Ⲵ㔃 нӵ䟽䟿 䖫ˈф┑䏣 䖭㦧 Ⲵ㓖 㾱≲DŽ⊭䖖 㟲 䲀 㖁Ṭ 䇮䇑 ˄㬍㢢˅ н 䇮䇑 ˄哴㢢˅ˈ 1 ⽪DŽ䴦Ԧ 㓖 ⛩˄䖭㦧 ⛩˅Ⲵ ս〫ˈ 䈕⛩к й⿽䖭㦧 ӗ⭏Ⲵս〫 Ѫ0.05ǃ0.02ǃ0.04ˈՈ 䇮䇑Ⲵⴞḷ 㜭 䇮䇑 DŽՈ 䰞仈 䘠 л˖ⴞḷ˖փ〟㓖 ˖ 䖭㦧Ⲵ㢲⛩ 1лⲴ ս〫 Ҿ0.05mm˗䖭㦧Ⲵ㢲⛩ 2лⲴ ս〫 Ҿ0.02mm˗䖭㦧Ⲵ㢲⛩ 3лⲴ ս〫 Ҿ0.04mmDŽ䇮䇑 䟿˖䖭㦧 ⛩1 䇮䇑 н 䇮䇑 Ⲵ 䲀 㖁Ṭ⁑⽪ Ⲵ 䗷〻 л ˖- ḷ䇶 䇮䇑он 䇮䇑 Ⲵ 䲀 ⁑ HyperMesh˗- ѹ Ⲵ ǃ䗩⭼ Ԧǃ䖭㦧ǃ Ո ˗- ⭘OptiStuct⺞ Ⲵ Ո ˗-㔃 ˄ փⲴ ˅ ԕ Ӿ0 1ⲴӁ 䇮䇑オ䰤ѝ ⽪ˈ䴰㾱 Ⲵ Ⲵ 䎻 Ҿ1DŽHyperMeshѝ ・ 䲀 ⁑ㅜ1↕˖䖭 OptiStruct 䈫 Ԧ1. HyperMesh2. User Profiles 䈍Ṷѝ䘹 OptiStructˈ ⛩ OKDŽ3.⛩ ḿ 䫞Files Panel DŽ ⲴOpen file… 䈍Ṷѝ䘹carm.hm Ԧˈ䈕 ԦսҾ<install_directory>/tutorials/hwsolvers /optistruct/4.⛩ Openˈcarm.hm Ԧ㻛䖭 HyperMesh䘋〻ѝˈ ԓ䘋〻ѝⲴ Ԇ DŽㅜ2↕˖ ・ օ ѹ 䘲Ⲵ㓴Ԧ⽪ ѝ ⭘ Ⲵйњcomponentsһ 㓿 ѹˈԕл䴰㾱 䳶 Ѫ⇿њcomponents Ⲵ DŽ1.⛩ Model 䫞ˈ ⁑ ⍿㿸デ к⛩ 啐ḷ 䭞ˈ〫 ḷ㠣Createˈ◰⍫ Ҽ㓗㨌 䘹 Materialˈ 2˖2↕僔1デ2. Nameḿѝ䭞 Steel3. Card imageḿѝ䘹 MAT13↕僔3デ4.⛩ Create/Editˈ5. MAT1㨌 ⭼䶒ˈ䇮㖞EѪ2.0E5ˈNuѪ0.34↕僔5デ6.⛩ return⽪˖ ѝⲴḀа亩⋑ 䍻 ˈ ԕ䙊䗷⛩ 䈕䘹亩 ◰⍫ˈ❦ ⽪Ⲵ䗃 ḿѝ䍻 DŽԕк ・Ҷањ Ⲵ steelˈ ѪOptiStruct Ⲵlinear isotropicˈ ∿⁑䟿Ѫ2E+05ˈ⋺ ∄Ѫ0.3DŽ⭡Ҿ ањ㓯 䶉 䰞仈ˈփ〟 ˈ ↔н䴰㾱 DŽն Ⲵ лˈ 享䇮 DŽ ԕ䲿 ⭘card image 䶒 collectorⲴ ⡷ 䘋㹼 DŽ7.⛩ Model 䫞ˈ ⁑ ⍿㿸デ к⛩ 啐ḷ 䭞ˈ〫 ḷ㠣Createˈ◰⍫ Ҽ㓗㨌 䘹 Propertyˈ8. Nameḿ䭞 design_prop9.⛩ card image= 䘹 PSOLID10.⛩ material = 䘹 Steel11.⛩ Create12. к ・ањ ⲴPropertyˈ Nameḿ䭞 nondesign_prop13.⛩ card image= 䘹 PSOLID14.⛩ material = 䘹 Steel15.⛩ Create16.ӾCollectorsⲴл 㨌 ⛩ Assign䘹 Component Propertyˈ 55↕僔16デ17.⛩ Compˈ䘹nondesign, ⛩ select6↕僔17デ18.⛩ property= 䘹 nondesign_prop19.⛩ assign20.䟽 20-22↕ˈ䇮㖞design_prop design21.⛩ returnㅜ3↕˖ 䖭㦧 load collector↕僔䴰㾱 4њ䖭㦧 load collectorˈ ѪSPCǃBrakeǃCorner Potholeˈ н Ⲵ仌㢢ˈ↕僔 л˖1.⛩ Model 䫞ˈ ⁑ ⍿㿸デ к⛩ 啐ḷ 䭞ˈ〫 ḷ㠣Createˈ◰⍫ Ҽ㓗㨌 䘹 LoadCollector2.⛩ name = 䗃 SPC3. Card imageѝ䘹 ѪNone4.⛩ color 䈳㢢 䟼䘹 а⿽仌㢢5.⛩ Create6. кˈ йњ䖭㦧 ˈ 〠 ѪBrakeǃCorner Potholeㅜ4↕˖ 㓖1. 䗩デ ⛩ LoadCollectorsˈ 䭞⛩ SPC ⛩ M ake CurrentˈSPC䇮㖞Ѫ Ⲵ2.ӾAnalysis亥䶒ˈ⛩ Constraintsˈ䘋 ѹ㓖 Ⲵ䶒3.Ӿ䶒 Ⲵ 䫞ѝ䘹 create 䶒4. デ ѝˈ䙊䗷⛩ 䘹 ㇑аㄟⲴ㢲⛩˄ ㄟˈ 7˅ˈ㓖dof1ǃdof2 dof3йњ㠚⭡ ˈdof4ǃdof5 dof6йњ㠚⭡ ⋑ 㓖5.⛩ Createˈ 㓖 ˈ デ ѝ㻛䘹 Ⲵ㢲⛩ ⧠й䀂 㓖 ㅖˈк䗩Ⲵ 123㺘 ⋯x䖤ǃy䖤ǃz䖤 Ⲵ〫 㠚⭡ 㓖7㓖 ㇑аㄟⲴdof1ǃdof2 dof3 йњ㠚⭡6.䘹 ㇑ аㄟⲴ㢲⛩ 㓖 dof 2 dof 3 㠚⭡ ˈ 87.⛩ create DŽ デ ѝ㻛䘹 Ⲵ㢲⛩ ⧠й䀂 㓖 ㅖ ˈк䗩Ⲵ23㺘 ⋯y 䖤ǃz䖤 Ⲵ〫 㠚⭡ 㓖 DŽ8㓖 ㇑ аㄟⲴdof2 dof3 єњ㠚⭡8.⛩ nodes ˈ Ӿ 䘹亩デ ѝ䘹 by id9.䗃 3239 䖖ˈ 䘹 ID Ѫ3239Ⲵ㢲⛩ˈ 9DŽ10.ӵ㓖 dof3DŽ11.⛩ create DŽ デ ѝ㻛䘹 Ⲵ㢲⛩ ⧠й䀂 㓖 ㅖ ˈк䗩Ⲵ3㺘 ⋯z 䖤 Ⲵ〫 㠚⭡ 㓖 DŽ9㓖 ID3239㢲⛩Ⲵdof33239 㢲⛩12.⛩ return䘄 ѫ㨌ㅜ5↕˖ 䖭㦧㢲⛩2699к 䖭йњ⤜・Ⲵ ˈ xǃy z кˈ Ҿbrakeǃcorner potholeйњload collectorDŽ ⭘㺘1ѝⲴ 䖭㦧DŽ փ↕僔 л˖㺘1 Ⲵ䇮Node Id Collector Magnitude Axis2699brake1000x-axis2699corner1000y-axis2699pothole1000z-axis1. 䗩デ ⛩ LoadCollectorsˈ 䭞⛩ Brake ⛩ Make CurrentˈBrake䇮㖞Ѫ Ⲵ2.ӾAnalysis亥䶒ˈ⛩ forcesˈ䘋 ѹ䖭㦧Ⲵ䶒3.⛩ nodes 䘹 by id4.䗃 㢲⛩ 2699ˈ 䖖䭞5.⛩ 䖖䭞magnitude= 䗃 1000.0ˈ 䖖䭞6.⛩ magnitude =л䶒Ⲵ ѹ ˈ 㨌 ѝ䘹 x-axis7.⛩ createˈ 㢲⛩2699Ⲵx䖤 1000 սⲴ䳶ѝ ˈ↔ 㢲⛩2699⧠ањ x Ⲵ㇝ DŽ8.ѪҶ 㿶䖭㦧Ⲵ㺘⽪㇝ ˈ 䘹 uniform size= 䭞 100ˈ 䖖䭞9. 䗩デ ⛩ LoadCollectorsˈ 䭞⛩ Corner ⛩ M ake CurrentˈCorner䇮㖞Ѫ Ⲵ10.⛩ nodes 䘹 by id11.䗃 㢲⛩ 2699ˈ 䖖䭞12.⛩ magnitude= 䗃 1000.0ˈ 䖖䭞13.⛩ magnitude =л䶒Ⲵ ѹ ˈ 㨌 ѝ䘹 y-axis14.⛩ createˈ 㢲⛩2699Ⲵy䖤 1000 սⲴ䳶ѝ15. 䗩デ ⛩ LoadCollectorsˈ 䭞⛩ Pothole ⛩ Make CurrentˈPothole䇮㖞Ѫ Ⲵ16.⛩ nodes 䘹 by id17.䗃 㢲⛩ 2699ˈ 䖖䭞18.⛩ magnitude= 䗃 1000.0ˈ 䖖䭞19.⛩ magnitude =л䶒Ⲵ ѹ ˈ 㨌 ѝ䘹 z-axis20.⛩ createˈ 㢲⛩2699Ⲵz䖤 1000 սⲴ䳶ѝ21.⛩ return Analysis 亥䶒10㢲⛩2699 йњ Ⲵ䖭㦧ㅜ6↕˖ OptiStruct䇮 䗩⭼ Ԧ ѹ DŽ1. Analysis亥䶒䘋 loadsteps 䶒2.⛩ name= 䗃 Brakeˈ 䖖䭞3.⺞䇔typeѪlinear static4.⺞䇔SPC Ⲵ 䘹Ṷ㻛䘹ѝˈ5.⛩ Ⲵ ⴞ Ӿload collectors 㺘ѝ䘹 spc6.⺞䇔LOAD Ⲵ 䘹Ṷ㻛䘹ѝˈ⛩ Ⲵ ⴞ Ӿload collectors 㺘ѝ䘹 brake7.⛩ createˈањOptiStruct brake 㓿 ˈ䈕 Ⲵ㓖 ⭡loadcollectorѝⲴspc ˈ ⭡load collectorѝⲴbrake8. ṧ↕僔 ѹCorner Pothole9.⛩ return Analysis⭼䶒HyperMeshѝ䇮㖞Optimizationㅜ7↕˖Ѫ Ո ѹ䇮䇑 䟿1. Analysis亥䶒䘹 optimization䶒2.䘹 topology䶒3.Ӿ䶒 Ⲵ 䫞ѝ䘹 create 䶒4.⛩ DESVAR= 䗃 design_prop, 䖖䭞5.⛩ props 䘹 design_propˈ⛩ select6.䘹 type: PSOLID7.⛩ Createˈ ѹҶањ Ո Ⲵ䇮䇑オ䰤design_propˈ PropertycollectorѝⲴ Ѫdesign_propⲴ ⧠ 䜭 䇮䇑オ䰤ѝ8.⛩ return䘄 optimization䶒ㅜ8↕˖ ѹ䘉њՈ 䰞仈ѝˈⴞḷ փ〟Ⲵ ˈ㘼㓖 Ⲵ2699 㢲⛩Ⲵս〫DŽ єњ ˖ањ ⭘Ҿ ѹⴞḷⲴփ〟 ˈ ањ ս〫 DŽ ⽪˖⭡Ҿйњ䖭㦧 䜭 ⭘ Ⲵ㢲⛩ս〫 Ѫ ˈ ԕ 䴰㾱 ѹањս〫 DŽ1.䘹 responses䶒2.⛩ response = 䗃 volDŽ3.⛩ ㊫ response type 㨌 ѝ䘹 volume4.⺞䇔regional/total㖞Ҿtotal˄唈䇔 ˅ˈ5.⛩ createDŽ⁑ Ⲵփ〟 vol 㻛 ѹ6.⛩ response = 䗃 disp17.⛩ response type 㨌 ѝ䘹 Static displacementDŽ8.⛩ nodes Ӿ Ⲵ 亩䘹 㨌 ѝ䘹 by IDDŽ9.䗃 2699 䖖DŽ йњ Ⲵ㢲⛩㻛䘹10.䘹 total dispDŽ䘉 xǃyǃzйњ ḷ䖤 Ⲵ ս〫DŽ11.⛩ createDŽ㢲⛩2699Ⲵ ս〫 disp1 㻛 ѹDŽ12.⛩ return䘄 optimization䶒 DŽㅜ9↕˖ ѹⴞḷѝⴞḷ ѹⲴvol փ〟 DŽ1. optimization䶒 ˈ䘹 objective 䶒2.⛩ objective䶒 к䀂Ⲵ䖜 䫞ˈӾ 㨌 ѝ䘹 min3.⛩ response =ˈ Ӿ 㺘ѝ䘹 Vol4.⛩ create5.⛩ return䘄 optimization䶒 DŽㅜ10↕˖ ѹ䇮䇑㓖⇿ањ ˈ ѹⲴ ս〫 disp1 ањкл䲀㓖 DŽ1. optimization䶒 䘹 dconstraints 䶒2.⛩ constraint = 䗃 constr13.⺞䇔upper bound =㻛䘹ѝˈ4.⛩ upper bound = 䗃 0.055.⛩ response = 㺘ѝ䘹 disp16.⛩ loadstepsˈ䘹 brake7. ⛩ select8.⛩ createbrakeˈ disp1к ѹҶањк䲀Ѫ0.05Ⲵ㓖 DŽ9.⛩ constraint = 䗃 constr210.⺞䇔upper bound = 㻛䘹ѝˈ11.⛩ upper bound = 䗃 0.0212.⛩ response= 㺘ѝ䘹 disp113.⛩ loadstepsˈ䘹 corner14.⛩ createcornerˈ disp1к ѹҶањк䲀Ѫ0.02Ⲵ㓖 DŽ15.⛩ constraint = 䗃 constr316.⺞䇔upper bound = 㻛䘹ѝˈ17.⛩ upper bound = 䗃 0.0418.⛩ response = 㺘ѝ䘹 disp119.⛩ loadstepsˈ䘹 pothole20.⛩ create21.⛩ returnє⅑䘄 ѫ㨌potholeˈ disp1к ѹҶањк䲀Ѫ0.04Ⲵ㓖 DŽㅜ11↕˖ỰḕOptiStruct䗃㹼≲䀓 ˈOptiStruct ԕ ⁑ 䘋㹼ṑ傼ˈԕ䇴ՠ⁑ 䇑㇇ 䴰㾱Ⲵ⻱ⴈオ䰤ԕ DŽ ṑ傼䘀㇇ѝˈOptiStructҏՊỰḕ 㹼 Ո 䴰Ⲵ ˈ ⺞ 䘉Ӌ нՊ ケDŽ1. Analysis亥䶒䘹 OptiStruct 䶒2.⛩ input file: ḿ Ⲵsave as…ˈ Save file… 䈍Ṷ3.䘹 ањ⭘ OptiStruct ԦⲴⴞ ˈ File name:ḿѝ䗃 ⁑ Ԧcarm_check.femˈ4.⛩ SaveDŽ.5.fem ԦⲴ ѪOptiStruct䗃 ԦⲴ 㦀 DŽ ⌘carm_check.femⲴ Ԧ ս㖞 ⽪ input file: ḿѝ6.⛩ export options: 䖜 䫞ˈ䘹 all7.⛩ run options:䖜 䫞ˈ䘹 check8.⛩ memory options: 䖜 䫞ˈ䘹 memory default9.⛩ OptiStruct䘉ṧ ҶOptiStructỰḕ䘀㇇ˈа 䗷〻㔃 ˈ ԕ ⲴDOS UNIXデ ѝˈⴻ carm_check.out ԦⲴ ˈ Ԧ䇮㖞Ⲵ ǃՈ 䰞仈Ⲵ䇮㖞ǃ 䘀㹼䇑㇇ 䴰㾱Ⲵ ⺜ⴈオ䰤 Ⲵՠ䇑ǃՈ 䘝ԓ 䇑㇇ 䰤Ⲵ ˈҏ 㜭ⴻ 䆖 䭉䈟 DŽՈ 䰞仈 ・ ↓⺞ˈ䈧ḕⴻcarm_check.out ԦѝⲴOptimization Problem Parameters䜘 DŽⴞḷ ↓⺞ˈ䈧ḕⴻcarm_check.out ԦѝⲴOptimization Problem Parameters䜘 DŽ㓖 ↓⺞ˈ䈧ḕⴻcarm_check.out ԦѝⲴOptimization Problem Parameters䜘 DŽ䏣 Ⲵ⺜ⴈオ䰤䘀㹼Ո ˈ䈧ḕⴻcarm_check.out ԦѝDisk Space Estimation Information䜘 DŽㅜ12↕˖䘋㹼Ո ≲䀓䇑㇇1. Analysis亥䶒䘹 OptiStruct 䶒2.⛩ input file: ḿ Ⲵsave as…ˈ Save file… 䈍Ṷ3.䘹 ањ⭘ OptiStruct ԦⲴⴞ ˈ File name:ḿѝ䗃 ⁑ Ԧ arm_check.femˈ4.⛩ SaveDŽ.5.⛩ run options:䖜 䫞ˈ䘹 optimization.6.⛩ OptiStructˈ䘋㹼≲䀓≲䀓㔃 ˈDOSデ ⧠Ā…Processing completeā DŽ ⁑ 䭉䈟ˈOptiStructҏՊ ⽪ 䭉 ↔ carm_complete.out Ԧѝˈ փ 䙊䗷 Ԧ㕆䗁 ḕⴻDŽ≲䀓䗷〻ѝˈ䖟Ԧ㠚 ⭏ ԕл Ԧ˖carm_complete.resˈcarm_complete.hgdataˈcarm_complete.outˈcarm_complete.oslogˈcarm_complete.ossˈcarm_complete.shˈcarm_complete_hist.mvwˈcarm_complete.HM.ent.cmfˈcarm_complete.statㅹˈ䘉Ӌ Ԧarm_check.fem Ԧ ањⴞ ѝDŽ7. 䰝DOSデ ⛩ returnˈ䘋 ѫ㨌 DŽHyperViewѝḕⴻ㔃 ⨶䘝ԓѝˈ 㔃 㻛䗃 carm_complete_des.h3d ԦDŽ ˈ ㅜа⅑ а⅑䘝ԓѝ⇿⿽ ⲴDisplacement˄ս〫˅ Stress˄ ˅㔃 㻛唈䇔䗃 carm_complete_s#.h3d Ԧˈ䘉䟼”#” ⲴIDDŽл䶒 ӻ㓽 օ HyperViewѝḕⴻ㔃 DŽㅜ13↕˖ḕⴻ㔃1. Ԕデ ⴻ Process completed successfully ˈ⛩ 㔯㢢ⲴHyperView 䫞ˈ 㜭 HyperViewˈ 㠚 䖭 㔃 DŽ⁑ 㔃 Ԧ 䖭 HyperViewⲴ デ ⧠ˈ⌘ HyperViewⲴйњн 亥䶒ѝˈ 䖭 Ҷ3њ.h3d ԦDŽ2.⛩ Close 䰝 デ DŽḕⴻ⁑ Ⲵ ⣦ Ҿ 䗩⭼ Ԧ ↓⺞ ѹ ⁑ DŽㅜ1亥 Ո 㔃 ˈㅜ2ǃ3ǃ4亥 ԕḕⴻ 㔃 ˈ3.⛩ ḿNext page 䫞䘋 ла亥䶒DŽㅜ2亥 ⽪arm_complete_s1.h3d Ԧ㔃 DŽ⌘ ˈ↔亥 ѪSubcase 1 –brakeˈ 㔃 о brake DŽ4.⛩ ḿ 䫞Contour DŽ5.⛩ ◰⍫Result type:ḿㅜањл 㨌 䘹 Displacement [v]DŽ6.⛩ ◰⍫ㅜҼњл 㨌 ˈ 䘹 MagDŽ7.⛩ Apply ⽪ս〫Ӂ DŽ8.⛩ ḿ 䫞Deformed DŽ9. Result type:ḿѝ䘹 Displacement [v]ˈ Scale˖ḿѝ䘹 model unitsˈType˖ḿѝ䘹 UniformDŽ10. value: ḿѝ䗃 10ˈ ս〫Ѫ10њ⁑ սˈ ս〫 ∄ DŽ11. Undeformed shape˖л䶒⛩ Show Ⲵл 㨌 ˈ䘹 WireframeDŽ12.⛩ ApplyDŽデ ⧠Ҷ⁑ Ӂ ˈ㺘䶒 Ⲵ Ⲵ㖁ṬDŽ11 ս〫Ӂ13. 12 ⽪ ⭫⁑ ѝ䘹 Linear Static12 ⭫⁑ ㊫14.⛩ 㓯 䶉 ḷ ⁑ ⭫DŽ ⽪ㅜањ brake ⭫ˈ⌘ḷⲴ ˈ䈤 ⁑ DŽ䈧 㘳л 䰞仈˖˄1˅ ㅜањ лˈ Ⲵ䖭㦧 ӰѸ ˛˄2˅ њ㢲⛩Ⲵ㠚⭡ 㻛㓖 Ҷ˛˄3˅䗩⭼ Ԧ ⭘Ҿ㖁Ṭ ˈ ⣦ ↓⺞˛15. GUIⲴ 䜘ˈ⛩ Static Analysis Iteration 0˄ 13 ⽪˅ˈ◰⍫LoadCase and Simulation selection 䈍ṶDŽ13◰⍫Load Case and Simulation selection 䈍Ṷ16. Iteration 18䘹 ㅜ18⅑䘝ԓDŽӁ ⽪ㅜањ brakeⲴㅜ18⅑䘝ԓⲴս〫㔃 ˈ оՈ Ⲵ 䘝ԓ DŽ17. ⅑⛩ 㓯 䶉 ḷ → ⭫DŽ18.⛩ Next page ḷˈ䘋 ㅜ3亥DŽㅜ3亥 ⽪arm_complete_s12.h3d Ԧ㔃 DŽ⌘ ˈ↔亥 ѪSubcase 2 –cornerˈ 㔃 о corner DŽ19.䟽 2ˉ17↕ ⽪ㅜҼњ ⁑ Ӂ DŽ䈧 㘳л 䰞仈˖˄1˅ ㅜҼњ лˈ Ⲵ䖭㦧 ӰѸ ?˄2˅ њ㢲⛩Ⲵ㠚⭡ 㻛㓖 Ҷ?˄3˅䗩⭼ Ԧ ⭘Ҿ㖁Ṭ ˈ ⣦ ↓⺞?20.⭘ ṧⲴ ⌅ˈỰḕㅜйњ potholeⲴս〫 DŽㅜ14↕˖ḕⴻ 㔃 䶉ㅜ1亥䖭 Ⲵ Ո 䘝ԓ㔃 ˄ ˅DŽ1.⛩ Previous page ḷⴤ 亥䶒 ⽪ѪDesign Historyˈ↔亥㔃⇿а↕Ո 䘝ԓDŽ2.⛩ ḿContour 䫞DŽ3.⛩ ◰⍫Result type˖ḿㅜањл 㨌 ˈ䘹 Element Densities[s]DŽ⛩◰⍫ㅜҼњл 㨌 ˈ䘹 DensityDŽ4. Averaging method˖ḿѝ䘹 SimpleDŽ5.⛩ Applyˈ ⽪ Ӂ DŽ6.䘹 ḿDeformed 䫞DŽ7.⛩ Show˖ḿˈ䘹 Featuresˈӵ ⽪ 㖁ṬⲴ䗩⭼DŽ8. GUIⲴ 䜘ˈ⛩ Design 㘵Iteration 0ˈ◰⍫Load Case and Simulationselection 䈍ṶDŽ9. Iteration 18䘹 ㅜ18⅑䘝ԓDŽ⁑ ѝⲴ 䝽Ҷа⿽ 㢢 ˈ⭘Ҿ㺘⽪ ⅑䘝ԓѝ Ⲵ DŽ䈧 㘳л 䰞仈˖˄1˅ Ⲵ 䜭 䘁1 㘵0?˄2˅ ѝ䰤 Ⲵ ˄ ӻҾ0 1ѻ䰤˅ˈ 䴰㾱䈳 DISCRETEDŽ DISCRETE˄ optimization䶒 opti controlѝ䇮㖞˅ ⭘Ҿ ѝ䰤 Ⲵ 䎻 Ҿ1 㘵0ˈ Ҿ Ⲵ㔃 DŽ Ҿ ˈ⧠ Ⲵ㖁Ṭ 㔃 㓿䏣 DŽ㔃 䴰㾱 Ⲵ 䎻 Ҿ1.0ˈ㘼н䴰㾱 Ⲵ 䎻 Ҿ0.0DŽ˄3˅max =ḿѝ ⽪1.0e+00? ⺞ ↔DŽн ˈ Ո Ⲵ䘋〻н DŽ ԕ䘋㹼 Ⲵ䘝ԓ ˄ ˅ ⴞḷⲴ OBJTOLⲴ ˄ optimization䶒 opti controlѝ䇮㖞˅DŽ 䈳 Ҷ DISCRETEˈ ф˄ ˅ ⴞḷⲴ OBJTOLӽн㜭ӗ⭏ Ⲵ䀓˄⋑ Ⲵ Ѫ1.0˅ˈ⭘ 㜭䴰㾱ỰḕՈ 䰞仈Ⲵ䇮㖞DŽ ѹⲴаӋ㓖 㔉 Ⲵⴞḷ л 㜭 ⌅䗮 Ⲵ˄ ѻӖ❦˅DŽ。
ansys workbench拓扑优化实例摘要:I.引言- 介绍ANSYS Workbench- 介绍拓扑优化II.ANSYS Workbench 拓扑优化实例- 实例一:某汽车零件拓扑优化- 背景介绍- 优化目标- 优化过程- 优化结果- 实例二:某飞机结构拓扑优化- 背景介绍- 优化目标- 优化过程- 优化结果III.拓扑优化在工程中的应用- 提高材料利用率- 减轻结构重量- 提高结构性能IV.总结- 总结ANSYS Workbench 拓扑优化实例- 展望拓扑优化在未来的发展正文:I.引言ANSYS Workbench 是一款集成的多物理场仿真工具,可以帮助工程师进行结构、热、流体、电磁等多种物理场的仿真分析。
在结构设计中,拓扑优化是一种重要的设计方法,可以有效地提高材料利用率、减轻结构重量、提高结构性能。
本文将通过两个实例,介绍如何在ANSYS Workbench 中进行拓扑优化分析。
II.ANSYS Workbench 拓扑优化实例实例一:某汽车零件拓扑优化背景介绍:在汽车制造领域,工程师们经常需要设计轻量化的零件,以提高汽车性能、降低油耗。
针对某汽车零件,我们需要在保持其功能不变的前提下,进行拓扑优化,以减轻其重量。
优化目标:在满足零件强度、刚度、耐疲劳等性能要求的前提下,降低零件重量。
优化过程:1.使用ANSYS DesignModeler 绘制零件的三维模型,并导出为IGS 格式文件。
2.在ANSYS Workbench 中,创建一个新的结构分析项目,并将模型导入到Workbench 中。
3.定义零件的材料属性、边界条件、载荷等。
4.运行拓扑优化分析,设置优化目标(如最小化零件质量)和约束条件(如保持零件的几何形状不变)。
5.查看优化结果,并使用DesignModeler 对优化后的零件进行可视化展示。
优化结果:经过拓扑优化,零件的质量减轻了约20%,同时保持了原有的强度、刚度和耐疲劳性能。
工作台拓扑优化是指对工作台布局和组织结构进行优化和调整,以提高工作效率和员工舒适度。
在现代企业管理中,工作台拓扑优化的重要性日益突出,因为良好的工作台拓扑可以帮助企业提高工作效率,降低成本,并促进员工之间的合作和沟通。
二、工作台拓扑优化的实施步骤1. 调查和分析现有工作台布局和组织结构。
首先需要对现有的工作台布局和组织结构进行全面的调查和分析,包括工作台的使用情况、员工的工作习惯和需求等方面的信息。
2. 制定拓扑优化方案。
根据调查和分析的结果,制定出针对性的拓扑优化方案,包括工作台布局的调整、设备的重新配置和员工的培训等。
3. 实施拓扑优化方案。
将制定好的拓扑优化方案付诸实施,包括对工作台布局的调整、设备的重新配置和员工的培训等。
4. 跟踪和评估效果。
在实施拓扑优化方案之后,需要对其效果进行跟踪和评估,以确保优化方案的有效性,并根据评估结果进行进一步的调整和优化。
以某制造企业的生产车间为例,介绍工作台拓扑优化的具体实施步骤和效果评估。
1. 调查和分析该企业的生产车间一直存在着生产效率低下和员工沟通不畅的问题。
通过对车间的现状进行调查和分析,发现问题主要集中在工作台布局不合理、设备摆放混乱和员工之间的交流不便等方面。
2. 制定拓扑优化方案针对生产车间存在的问题,制定了拓扑优化方案。
具体包括调整工作台布局,将设备重新摆放,设置员工交流区域等。
3. 实施拓扑优化方案在完成拓扑优化方案的制定后,将其付诸实施。
重新调整了工作台的布局,对设备进行了重新配置,并设置了员工交流区域。
4. 跟踪和评估效果在拓扑优化方案实施后,对生产车间的工作效率和员工之间的沟通情况进行了跟踪和评估。
经过一段时间的观察和评估,发现生产效率明显提升,员工之间的沟通也变得更加顺畅。
四、结论工作台拓扑优化是企业管理中非常重要的一环,通过对工作台布局和组织结构进行合理的调整和优化,可以大大提高企业的工作效率和员工的舒适度。
企业在实施工作台拓扑优化时,应该注重调查和分析、制定方案、实施方案和效果评估等具体步骤,以确保优化方案的有效性和可持续性。