车载网络系统及其故障诊断方法
- 格式:ppt
- 大小:9.01 MB
- 文档页数:84
汽车车载网络系统的常见故障与诊断【摘要】汽车车载网络系统是一种全新的汽车电控系统信息通信方式。
有着自身独特的结构.工作特性以及相应的故障特点,对其性能的检测、故障的诊断和排除也应有其对应的方法、步骤和注意事项。
【关键词】车载网络;故障;诊断;维修【中图分类号】u463.6随着汽车技术日新月异的发展,现代汽车上使用了大量的电子控制装置,为了简化线路,提高各电控单元之间的通信速度,降低故障频率,一种新型的数据网络一一车载网络系统应运而生,它具有实时性强、结构简单、互操作性好、总线协议具有完善的错误处理机制,灵活性高和价格低廉等特点。
但同时也使汽车故障分析诊断更加复杂,故障原因更加不易确定。
一、汽车车载网络系统故障类型一般说来,引起汽车车载网络信息传输系统故障的原因有三类:①电源系统故障;②信息传输系统的链路故障;③信息传输系统的节点故障。
1、电源系统故障汽车车载网络信息传输系统的核心部分是含有通信ic芯片的电控模块,电控模块的正常工作电压在10.1~15.0v。
如果汽车电源系统提供的工作电压低于该范围,就会造成一些对工作电压要求高的电控模块出现短暂的停工,从而使整个汽车多路信息传输系统出现短暂无法通信的现象。
产生故障的原因主要是蓄电池、发电机、供电线路、熔断丝等元器件有故障。
2、节点故障节点是汽车多路信息传输系统中的电控模块,因此节点故障就是电控模块的故障。
它包括软件故障即传输协议或软件程序有缺陷或冲突.这种故障一般成批出现.且无法维修。
硬件故障一般由于通讯芯片或集成电路故障,造成汽车多路信息传输系统无法正常工作。
产生故障的原因主要是各类控制单元、传感器等元器件有故障。
3、链路故障当汽车车载网络信息传输系统的链路(或通信线路)出现故障时,如通信线路的短路、断路,以及线路物理性质引起的通信信号衰弱或失真,都会引起多个电控单元无法工作或电控系统错误,使多路信息传输系统无法工作。
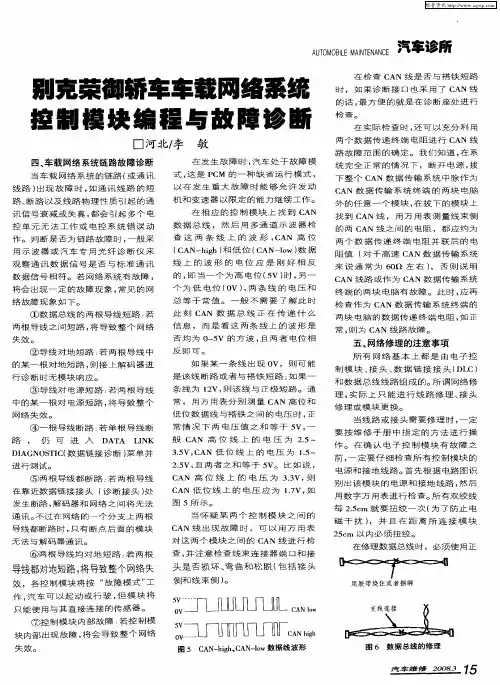
判断是否为链路故障时,一般采用示波嚣或汽车专用光纤诊断仪来观察通讯数据信号是否与标准通讯数据信号相符。
摘要:车载网络技术现已广泛应用于轿车上,当网络出现故障时会严重影响汽车的各方面性能,甚至使汽车无法启动、行驶。
本文以福特汽车为例探寻汽车网络故障的诊断方法。
关键词:车载网络;CAN 总线;故障诊断汽车车载网络系统故障诊断方法探究佛山职业技术学院崔巍1引言随着汽车电子技术的不断发展,其越来越多地应用在汽车上。
为了提高汽车的环保性、经济性、安全性,现代汽车几乎每个电器系统都采用电子控制,每辆车上有少则十几个多则几十个电子控制单元,为使汽车性能最优化,需要各个相对独立的控制单元协调运行,实现数据共享。
要实现这个目标必须在各个控制单元间建立 联系,用数据线将各个控制单元连接起来,但由于汽车上的电子控制单元较多,且在汽车上的分布较分散,若只用数据线连接各个控制单元,不仅会增加汽车的重量也会增加汽车的制造成本,随之车载网络应运而生,通过两条数据线将整个汽车上的控制单元连接琢劭控制单元都在这两条线上传输,实现数据共享。
最典型 和应用最多的是CAN 网络。
但在汽车上增加一个系统会增加汽车发生故障的风险,网络系统的故障检修也成为维修人员要掌握的技能。
下面以福克斯汽车为例对车载网络故障的检修进行分析。
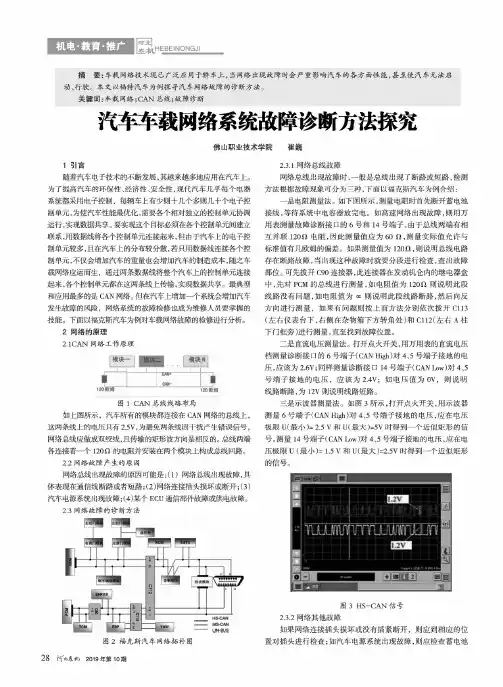
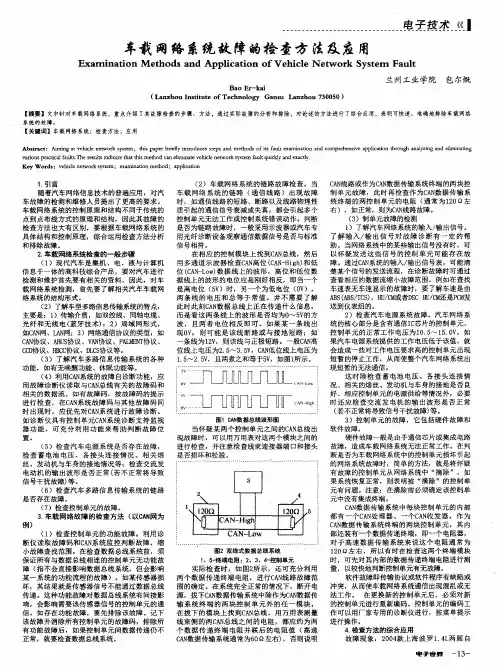
2网络的原理2.1CAN 网络工作原理模块一模块二模块N120欧姆图1 CAN 总线线路布局如上图所示,汽车所有的模块都连接在CAN 网络的总线上, 这两条线上的电压只有2.5V,为避免两条线因干扰产生错误信号,网络总线应做成双绞线,且传输的矩形波方向是相反的。
总线两端各连接着一个120Q 的电阻并安装在两个模块上构成总线回路。
2.2网络故障产生的原因网络总线出现故障的原因可能是:⑴网络总线出现故障,具 体表现在通信线断路或者短路;⑵网络连接插头损坏或断开;⑶ 汽车电源系统出现故障;⑷某个ECU 通信部件故障或供电故障。
2.3网络故障的诊断方法图2福克斯汽车网络拓朴图2.3.1网络总线故障网络总线出现故障时,一般是总线出现了断路或短路,检测方法根据故障现象可分为三种,下面以福克斯汽车为例介绍:一是电阻测量法。
汽车车载网络诊断分析摘要:汽车中的电子部件越来越多,光是ECU就有几十个,这么多的电子单元都要进行信息交互。
传统的点对点通信已经不能满足需求,因此必须要采用先进的总线技术。
目前,有三种主流的车用总线:CAN总线、LIN总线和MOST总线。
维修人员对于数据线不甚了解,下面我就简单介绍一下数据线传输特点,以及利用传输之间的关系进行故障诊断。
论文中的故障实例多为本人亲身体会,现总结归纳,为各位同行借鉴,如有不妥提出宝贵意见。
一、车用总线传输特点CAN(Controller Area Network)即控制器局域网,可以归属于工业现场总线的范畴,通常称为CAN bus,即CAN总线,是目前国际上应用最广泛的开放式现场总线之一。
CAN总线采用串行数据通信协议,这种通讯方式没有主机和从机之分,连到同一种数据总线的电脑地位相同,其上的任何一台电脑不但可以选择性接受数据,也可以向其它电脑发送数据指令。
通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
MOST 传输系统采用光电传输,抗干扰能力强。
它的传输速率24.8Mbps,适合传输速度要求较快的信息,比如声音和图像等信息。
每套MOST传控网络允许最多达60多个的装置(电脑)连接。
LIN总线结构是CAN总线补充,它的目标是为现有汽车网络提供辅助功能,在不需要CAN总线的带宽和多功能的场合使用,降低成本。
它有主机和从机之分。
主机发出数据指令,相应从机接收。
而从机则不能向主机发出指令数据。
主机发出指令,从机选择性接收指令并执行该指令,从机除了执行主机命名之外,LIN网络中的从机不接收和执行有关系统设置的任何其它信息。
主机发送一个包含同步中断、同步字节和消息识别码的信息。
从机在收到和过滤识别码后如果是自己要接收的信息则被激活,接收数据并执行该信息。
LIN总线传递信息时采用单线制,主机发出,多台从机接收。

车载网络系统原理与检修一、车载网络系统的原理1. 总线网络:车载网络系统采用了总线网络的结构,主要包括CAN 总线、LIN总线以及FlexRay总线。
这些总线网络按照不同的要求实现车内所有设备之间的信息传递和通信。
2.数据传输:车载网络系统通过总线网络将各个子系统连接起来,实现数据的传输和通信。
比如,通过CAN总线可以实现车辆各个子系统之间的信息传递,包括发动机、ABS系统、气囊系统等。
通过LIN总线可以实现车门控制、车窗控制等功能。
3.控制单元:车载网络系统中需要有相应的控制单元来管理和控制各个子系统。
控制单元通常采用微控制器或嵌入式处理器,负责进行数据处理、通信协议的解析和控制信号的生成。
4.嵌入式系统:车载网络系统中的软件部分通常是以嵌入式系统的形式存在,这意味着它具有实时性、可靠性和可扩展性。
软件主要包括操作系统、驱动程序和应用程序。
操作系统负责管理和调度硬件资源,驱动程序负责与硬件设备的通信,应用程序则提供了各种功能和服务。
二、车载网络系统的检修1. 硬件检修:硬件检修主要针对车载网络系统中的硬件设备进行检查和维修。
首先需要检查总线网络的连接是否正常,包括CAN总线、LIN 总线和FlexRay总线的连接和接口是否正常。
其次需要检查各个子系统的连接、设备状态和供电是否正常。
最后还需要检查控制单元和嵌入式系统的工作状态,包括CPU、内存和存储设备等。
2.软件检修:软件检修主要针对车载网络系统中的软件部分进行检查和维修。
首先需要检查操作系统是否正常运行,包括启动是否正常、资源管理是否正常等。
其次需要检查驱动程序是否正常工作,包括与硬件设备的通信是否正常、设备驱动是否正常等。
最后需要检查应用程序的功能和服务是否正常,包括GPS导航、娱乐功能、车辆诊断等是否正常运行。
综上所述,车载网络系统是通过总线网络实现各个子系统之间的信息传递和通信的系统,其原理主要包括总线网络、数据传输、控制单元和嵌入式系统。
大众汽车车载网络常见故障检修方法浅析当CAN总线出现故障或数据传输异常时,往往会出现多种奇怪的故障现象,如仪表板显示异常、车辆无法启动、启动后无法熄灭,、车辆动力性能下降、某些电控系统功能失等。
这是因为相关数据或信息是通过CAN总线传输的,如果传输失败,那么会产生多种连带故障,甚至造成整个网络系统瘫痪。
最为常见的故障现象是仪表显示异常。
在检修过程中,首先应查看具体的故障症状,根据故障症状和网络结构图来初步分析有可能是哪些原因造成的,然后使用相关的诊断仪器进行诊断。
CAN故障通常的原因有CAN线短路、对电源短路、对地短路、相互接反等。
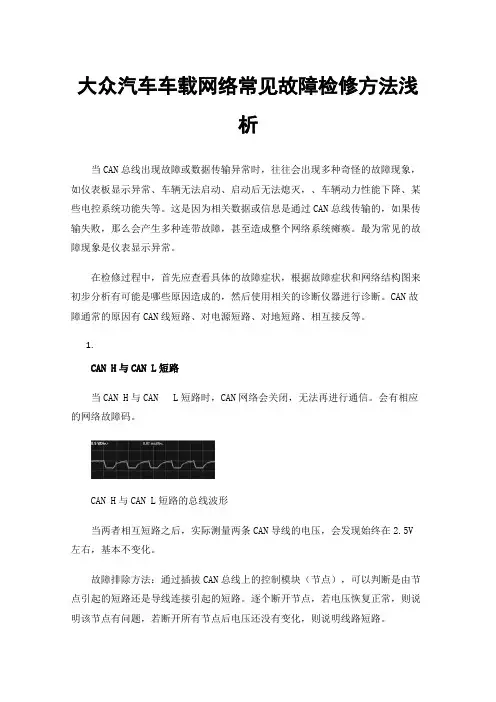
1.CAN H与CAN L短路当CAN H与CAN L短路时,CAN网络会关闭,无法再进行通信。
会有相应的网络故障码。
CAN H与CAN L短路的总线波形当两者相互短路之后,实际测量两条CAN导线的电压,会发现始终在2.5V 左右,基本不变化。
故障排除方法:通过插拔CAN总线上的控制模块(节点),可以判断是由节点引起的短路还是导线连接引起的短路。
逐个断开节点,若电压恢复正常,则说明该节点有问题,若断开所有节点后电压还没有变化,则说明线路短路。
1.CAN H对电源正极短路当出现CAN H对电源短路这种故障时,根据CAN总线的容错特性,可能出现整个CAN网络无法通信的情况或产生相关故障码。
以对12V电源短路为例,此时CAN H电压电位被置于12V,CAN L线的隐性电压被置于大约12V。
CAN H对电源短路的总线波形 CAN H对地短路的总线波形实际测量电压,若CAN H电压为12V,CAN L电压被置于约11V,则说明出现此类故障。
故障原因:如果不是CAN H导线对外部电源短路引起的,那么这种故障就有可能是控制模块内部的CAN收发器损坏造成的。
1.CAN H对电源负极(接地)短路当出现CAN H对地短路这种故障时,根据CAN总线的容错特性,可能出现整个CAN网络无法通信的情况或产生相关故障码。
车载网络系统故障诊断解析1车载网络体系的毛病表象关于轿车车载网络体系的毛病,毛病发作时通常都有一些显着的毛病特征:1)全部车载网络不作业或多个操控单元ECU 有毛病。
2)有些毛病表象时没有任何有关,有时候多个毛病表象会在不一样的体系和不一样的当地一起表现出来。
3)经过专用的毛病确诊设备与单个或多个操控单元ECU通讯,表象变现为无法与确诊设备衔接通讯。
2车载网络体系的毛病确诊的通常程序1)根本查看。
查看轿车蓄电池的静态电压、各接头之间的衔接状况、有关的保险丝以及发动机与车身的搭铁状况等。
2)衔接专用确诊仪,与呈现毛病的各电控体系进行通讯,并读取毛病码。
3)如有毛病码,按毛病码提示进行查看。
在CAN体系毛病码与其它毛病码一起呈现时,应优先对CAN体系进行毛病确诊。
如毛病确诊设备它具有对操控单元ECU进行CAN体系的毛病确诊和支撑监视器功用,经过确诊设备的这个功用可以用来协助判别毛病方位。
4)查看操控模块的电源供给及搭铁回路是不是杰出。
5)查看CANBUS数据总线的两根线路是不是杰出,最佳用多通道示波器对其进行波形查看,如不正常再用万用表进行查看是不是断路、短路。
6)拔下操控模块线束接头,对操控模块CANBUS数据总线接口两头的数据传递终端电阻进行查看,如不符请求,则操控模块内部不良。
7)在拔下操控模块线束接头,查看CANBUS数据总线接口的触摸状况,并使该操控模块不接入车内网络体系的状况下,调查毛病表象的变化,如毛病不见,则操控模块硬件损坏或内部软件毛病如未进行相应编程、设定等。
8)先对该操控模块进行从头设定,如毛病不能不见,则更换新模块再视情进行从头编程设定。
3车内局域网体系毛病确诊、扫除的有关关键1)了解每个类型的轿车网络体系的特色。
车载网络选用的大多是局域网(局域网是指在一个特定的有些单位内衔接的网络),其可用的传输介质主要有同轴电缆、双绞线、光纤电缆和无线电。
在轿车上会一起有多个局域网络存在,经过运用网关将这些局域网衔接起来从而构成互联网络。
车载网络系统及其故障诊断方法车载网络系统是指一个由多个电子设备和组件相互连接而成的网络,用于车辆内部各个功能的协调和控制。
这些设备包括发动机控制单元(ECU)、车载娱乐系统、车载导航系统、车载通信系统等等。
随着车辆技术的不断发展,车载网络系统的功能和复杂性也在不断提高,但同时也面临着各种故障的挑战。
故障诊断是车载网络系统维护和修复的重要环节,它的目标是确定故障的原因和位置,以便进行针对性的维修和修复。
下面介绍几种常见的车载网络系统故障诊断方法:1.故障码诊断:车辆的ECU和其他电子设备通常会通过故障码来指示其所遇到的问题。
技术人员可以通过读取和解码故障码,确定故障的位置和性质。
然后根据故障码提供的信息,对相应的设备和组件进行检查和修复。
2.数据记录和分析:车载网络系统通常会记录各种传感器数据、故障码以及其他相关信息。
通过分析这些数据,技术人员可以了解车辆在故障发生时的状态和环境条件,从而对故障的原因进行推断和定位。
3.反馈诊断:车载网络系统中的一些设备和组件可能具有自我诊断和修复功能。
例如,一些ECU可以通过监测输入和输出信号的变化,来判断设备是否工作正常。
如果发现异常,ECU可以通过重新配置自身或执行其他修复措施来恢复正常操作。
4.模拟测试:模拟测试是一种基于物理模型或仿真环境的故障诊断方法。
通过模拟车辆的各种状态和条件,技术人员可以对车载网络系统进行各种测试和检查,以确定可能存在的问题和故障。
总之,车载网络系统故障诊断是一个复杂而有挑战性的任务。
它需要技术人员具备扎实的电子技术和汽车维修知识,并且熟悉各种故障诊断方法和工具。
只有通过准确的故障诊断,才能及时修复车辆故障,保障车辆的正常运行。