第二章挖掘装置动力学及运动学分析.
- 格式:doc
- 大小:287.00 KB
- 文档页数:20
设计计算DESIGN & CALCULATION挖掘机工作装置运动和疲劳强度分析武慧杰1,杨建伟1,张志强2(1. 北京建筑大学 机电与车辆学院,北京 100044;2. 中交路桥北方工程有限公司,北京 100024)[摘要]针对挖掘机工作装置的疲劳损伤,利用Pro/E 及ANSYS 进行三维建模及有限元分析。
通过Pro/E 平台中的机构模块分析工作装置的极限位姿以及运动参数,然后利用工作装置位姿转换,基于力矩平衡关系,对斗杆挖掘和铲斗挖掘工况下的铰点进行受力分析,获取工作装置各铰点的最大载荷。
在此基础上,利用ANSYS 疲劳强度分析得出挖掘机最小疲劳全寿命。
研究结果可为挖掘机工作装置结构设计提供理论参考。
[关键词]挖掘机;运动分析;疲劳强度;全寿命[中图分类号]TU621 [文献标识码]B [文章编号]1001-554X (2015)06-0089-05Kinematics and fatigue strength analysis of excavator working deviceWU Hui -jie ,YANG Jian -wei ,ZHANG Zhi -qiang本文在Pro/E 软件中对挖掘机整机进行实体三维建模,并运用Pro/E 的机构运动分析模块对挖掘机工作装置的包络图及铲斗齿尖的位移、速度和加速度进行仿真模拟。
然后基于ANSYS 软件,结合工作装置位姿关系计算工作装置各铰点承受的最大载荷,在此基础上对挖掘机动臂、斗杆进行应力和全寿命分析,得到挖掘机工作强度和使用寿命的校核结果,为挖掘机工作装置强度和可靠性分析提供了高效的解决办法。
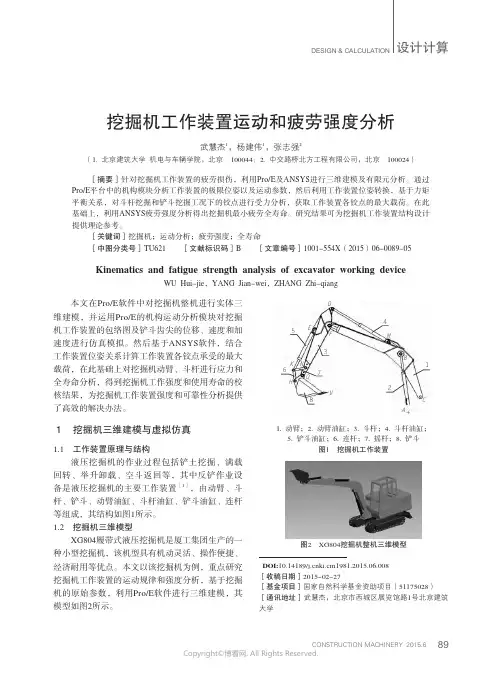
1 挖掘机三维建模与虚拟仿真1.1 工作装置原理与结构液压挖掘机的作业过程包括铲土挖掘、满载回转、举升卸载、空斗返回等,其中反铲作业设备是液压挖掘机的主要工作装置[1],由动臂、斗杆、铲斗、动臂油缸、斗杆油缸、铲斗油缸、连杆等组成,其结构如图1所示。
硬岩掘进机(TBM)的动力学分析与振动控制发表时间:2018-02-02T14:35:21.403Z 来源:《防护工程》2017年第28期作者:高敏吴文雯[导读] 硬岩掘进机(TBM)是隧道掘进的主要设备,广泛应用于铁路、公路、水利、市政建设等。
中国葛洲坝集团第三工程有限公司陕西西安 710000摘要:硬岩掘进机(TBM)是隧道掘进的主要设备,广泛应用于铁路、公路、水利、市政建设等。
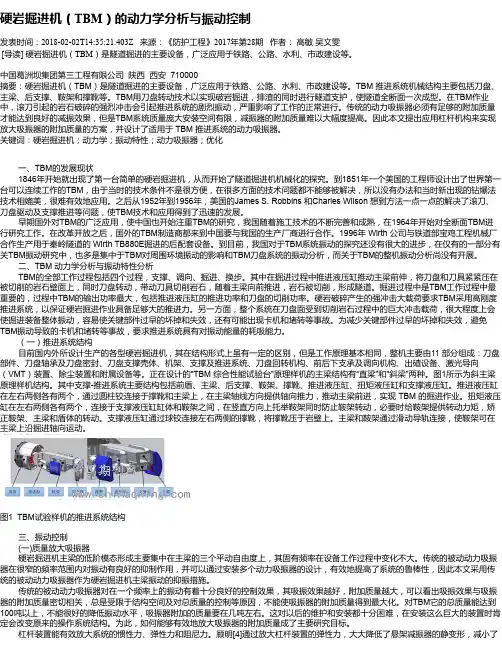
TBM 推进系统机械结构主要包括刀盘、主梁、后支撑、鞍架和撑靴等。
TBM用刀盘转动技术以实现破岩掘进,排渣的同时进行隧道支护,使隧道全断面一次成型。
在TBM作业中,滚刀引起的岩石破碎的强烈冲击会引起推进系统的剧烈振动,严重影响了工作的正常进行。
传统的动力吸振器必须有足够的附加质量才能达到良好的减振效果,但是TBM系统质量庞大安装空间有限,减振器的附加质量难以大幅度提高。
因此本文提出应用杠杆机构来实现放大吸振器的附加质量的方案,并设计了适用于 TBM 推进系统的动力吸振器。
关键词:硬岩掘进机;动力学;振动特性;动力吸振器;优化一、TBM的发展现状1846年开始就出现了第一台简单的硬岩掘进机,从而开始了隧道掘进机机械化的探究。
到1851年一个美国的工程师设计出了世界第一台可以连续工作的TBM,由于当时的技术条件不是很方便,在很多方面的技术问题都不能够被解决,所以没有办法和当时新出现的钻爆法技术相媲美,很难有效地应用。
之后从1952年到1956年,美国的James S. Robbins 和Charles Wilson 想到方法一点一点的解决了滚刀、刀盘驱动及支撑推进等问题,使TBM技术和应用得到了迅速的发展。
早期国外对TBM的广泛应用,使中国也开始注重TBM的研究,我国随着施工技术的不断完善和成熟,在1964年开始对全断面TBM进行研究工作。
在改革开放之后,国外的TBM制造商都来到中国要与我国的生产厂商进行合作。
1996年 Wirth 公司与铁道部宝鸡工程机械厂合作生产用于秦岭隧道的 Wirth TB880E掘进的后配套设备。
多自由度可控新型机械式挖掘机构的运动学和静力学研究
的开题报告
1. 研究背景与意义:
目前使用较多的挖掘机构设计通常为单自由度结构,只能控制一种运动,如:挖掘臂的位置、深度等。
这种结构存在效率低、适应性差等问题。
为解决这些问题,本
论文拟研究一种多自由度可控的新型机械式挖掘机构,通过掌握其运动学和静力学知识,为今后机械式挖掘机构的设计提供新的思路和方法。
2. 研究内容与目标:
本论文需要解决的问题有:多自由度可控新型机械式挖掘机构的运动学分析、运动轨迹规划;静力学分析、受力分析和扭矩优化等。
通过建立运动学和静力学的数学
模型,分析研究其可控程度和设计优化程度。
最终达到的目标是提供一种新型的、高
效的、适应性强的机械式挖掘机构设计思路。
3. 研究方法和技术路线:
本论文的研究方法为理论分析和仿真研究相结合,主要通过以下步骤展开:(1)建立多自由度可控新型机械式挖掘机构的运动学和静力学模型,研究机构的运动控制
与受力分析。
(2)利用仿真软件进行数值仿真,优化机械结构设计。
(3)搭建实验
平台进行实验验证,提出改进建议。
技术路线为运用机械制图、计算机辅助设计、solidworks和ANSYS有限元分析等技术手段进行分析研究。
4. 预期研究成果及应用:
通过本论文的研究,预期可以达到以下成果:(1)建立多自由度可控新型机械
式挖掘机构的运动学和静力学模型及控制算法;(2)设计高效、稳定的机械式挖掘机构,利用仿真软件进行验证;(3)通过实验验证,提出改进措施,为机械式挖掘机构的应用提供技术支持。
以上为本论文的开题报告。
农用挖掘机铲斗机构的多体运动学与动力学研究
1、引言
农用挖掘机铲斗机构是常见的农用机械设备,它利用铲斗颚的动力来完成施工土方的作业。
此外,它还能够实现运输、施工、装载和填埋等作业,能大大提高作业效率。
它的整体结构分为机壳、升降系统和相关附件等部件。
由于它的作业过程较为复杂,因此必须对其多体运动学及动力学问题进行深入研究,从而及时发现和解决它在使用过程中可能产生的问题,提高作业效率。
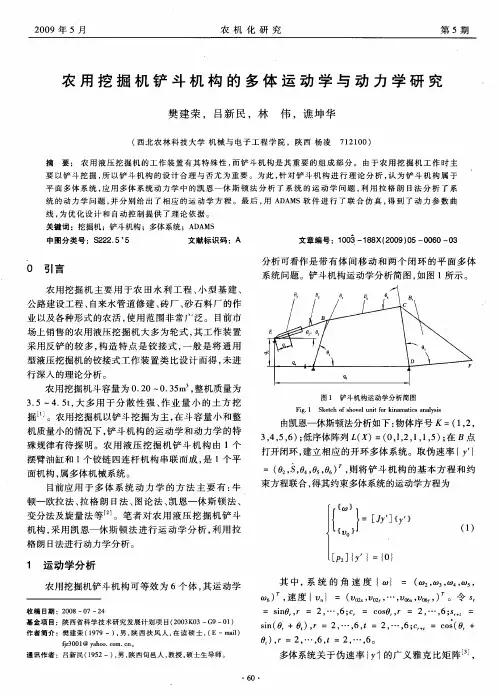
2、多体运动学
农用挖掘机铲斗机构的多体结构是铲斗颚、升降系统和立柱三部分组成的,其它部件如连接杆也可视为平衡受力的构件。
多体运动学的研究主要涉及铲斗机构每个组件在空间受力有限的情况下,相对于固定基础的运动学特性和物理关系。
解决该问题需要建立铲斗机构各组件的多体运动学模型,从而研究铲斗机构对基础及其他一些组件的作用和反作用,以此为基础运算出机构的受力分布,并结合实验结果进行实际计算。
3、动力学
动力学研究旨在了解铲斗机构的动力特性,特别是机构各连接轴的传动特性和受力特性,以及机构作业过程中各轴和机构整体的动力学特性。
特别是铲斗机构作业前后机构和各个轴系受力分类、空间运动特性以及施加在机构各个轴上的转矩和力分析。
铲斗机构动力学研究可有效地帮助企业了解机构结构、提高设计质量与生产设备制造水平,从而改善设备性能,提高生产效率。
4、结论
农用挖掘机铲斗机构的多体运动学与动力学研究是运用其空间分析和动力学分析的基础。
通过把多体运动学和动力学理论运用到机构结构中,可有效地协助完善设计、优化结构,提高操作性能、降低制造物的损耗等,从而提高农用挖掘机铲斗机构的地形调整精度和作业效率。
挖掘装载机装载工作装置动力分析、动态应力仿真研究及动臂结构拓扑优化一、本文概述本文旨在深入研究挖掘装载机装载工作装置的动力学特性,通过动态应力仿真分析,揭示装载工作装置在作业过程中的应力分布与变化规律,并在此基础上,对动臂结构进行拓扑优化,以提升其结构性能和使用寿命。
研究过程中,将结合理论分析、仿真模拟和实验验证等多种手段,构建全面、精确的动力学模型,并对模型的有效性进行验证。
本文的研究成果将为挖掘装载机的设计与优化提供重要的理论依据和技术支持,有助于提高装载机的作业效率和安全性能,促进挖掘机行业的持续发展。
在文章的结构安排上,首先将对挖掘装载机装载工作装置的动力学特性进行概述,为后续研究奠定基础。
接着,将详细介绍动态应力仿真分析的方法与过程,包括模型的建立、边界条件的设定、仿真结果的分析等。
在此基础上,将探讨动臂结构的拓扑优化方法,包括拓扑优化理论、优化模型的构建以及优化结果的评价等。
将通过实验验证仿真分析的有效性和拓扑优化的可行性,进一步说明研究成果的实用价值和应用前景。
本文将全面深入地挖掘装载机装载工作装置的动力学特性和动态应力变化规律,通过对动臂结构的拓扑优化,为挖掘装载机的设计与优化提供有力支持,推动挖掘机行业的技术进步和创新发展。
二、挖掘装载机装载工作装置动力分析挖掘装载机作为工程机械的重要组成部分,其装载工作装置的动力性能直接决定了机器的作业效率和稳定性。
因此,对挖掘装载机装载工作装置进行动力分析具有重要意义。
动力分析的主要目的是揭示装载工作装置在作业过程中的动力学特性,包括动态响应、振动特性以及能量传递等。
通过动力分析,可以深入了解装载工作装置在不同工况下的受力状态和运动规律,为后续的动态应力仿真研究和结构优化提供理论支持。
在动力分析过程中,通常采用多体动力学仿真软件建立装载工作装置的三维模型,并设置相应的约束条件和驱动函数。
通过仿真计算,可以模拟装载工作装置在实际作业过程中的动态行为,获得关键部件的动态位移、速度和加速度等动力学参数。
液压挖掘机是一种土石方施工机械,广泛应用于工程建设领域当中,并发挥着重要作用。
为了促进挖掘机朝着智能化方向发展,提升其自动化挖掘能力,应该对液压挖掘机运动轨迹进行科学规划。
国内外众多学者针对插值函数提出各种轨迹规划方法,在液压挖掘机运动学分析领域,包括杆组分析、适量代数和作图法等方法。
1 液压挖掘机工作装置运动学分析1.1 正运动学液压挖掘机相关机械装置具体包括四种自由度,为此需要在思维空间内展现出来,按照所选择的变量描述可划分成以下几个部分。
第一,由三组液压缸长度和回转马达夹角所构成的驱动结构空间;第二,由斗杆和铲斗两者夹角、动臂和斗杆夹角、回转平台和动臂夹角以及底座和回转平台夹角等部分形成关节空间;第三,由基础坐标系中的铲斗夹角状态和铲斗齿尖所形成的位姿空间。
创建液压挖掘机设备装置的运动学坐标系,随后根据相应的机器人坐标学原理能够了解到,空间坐标系中的任意一个向量都可以利用齐次转换矩阵转移至其他坐标系中,把转换矩阵与连杆坐标系进行相乘,能够获得铲斗齿尖坐标系。
根据液压挖掘机各种运行参数,能够计算出基础坐标系中的铲斗齿尖位置,从关节向量空间朝着铲斗位姿空间实施正向转化。
在抛除液压挖掘机实施回转运动条件下,绘制出液压挖掘机装置包络图,从理论上讲,铲斗齿尖理论能够囊括包络图限制范围内各个边界区域。
液压挖掘机相关正向运动即通过机械臂连杆参数对执行器末端位姿进行准确计算,建立D —H 坐标系。
挖掘机的铲斗齿尖是执行器末端,通过对变换矩阵进行研究发现,只有铲斗、斗杆和动臂之间转角关节为未知。
利用图形界面通过D —H 法绘制液压挖掘机运行软件,导出为单独运行软件。
将液压挖掘机装置连杆长度、机械臂动臂长度和简化后的机械臂斗杆长度输入软件当中,点击函数运算,便可以由软件主界面直接转移到函数绘制模块。
把液压挖掘机执行器末端位姿代表公式输入绘制界面中的CALLBACK 函数内,并对其他按钮函数进行科学设置,参考现有挖掘机参数测试软件性能,将现实状况和软件形成的液压挖掘机运行区域进行比较分析可以发现,软件绘制出来的挖掘机工作区域较为准确。
机械工程中的运动学与动力学分析机械工程是一门研究机械设备的设计、制造和运行的学科,它涵盖了广泛的领域,从汽车工业到航空航天,从机器人技术到能源领域。
在机械工程中,运动学和动力学是两个重要的分析方法,它们帮助工程师理解和优化机械系统的运动和能量转换。
运动学是研究物体运动的学科,它关注的是物体的位置、速度和加速度等运动特性。
在机械工程中,运动学分析对于设计和优化运动部件非常重要。
例如,在机器人技术中,运动学分析可以帮助工程师确定机器人的关节角度和末端执行器的位置。
在汽车工业中,运动学分析可以用于研究车辆的悬挂系统和转向系统,以提高车辆的稳定性和操控性能。
动力学是研究物体运动的原因和规律的学科,它关注的是力、质量和加速度之间的关系。
在机械工程中,动力学分析可以帮助工程师理解和优化机械系统的能量转换过程。
例如,在航空航天领域,动力学分析可以用于研究火箭发动机的推力和飞行器的轨迹。
在能源领域,动力学分析可以用于研究发电机的转速和发电效率。
运动学和动力学分析通常是紧密相关的,它们共同构成了机械工程中对机械系统进行全面分析的基础。
在实际工程应用中,工程师经常需要同时考虑运动学和动力学因素,以确保机械系统的设计和运行符合要求。
除了运动学和动力学分析,机械工程还涉及许多其他重要的技术和概念。
例如,材料力学是研究材料的力学性质和行为的学科,它对于机械工程中材料的选择和设计至关重要。
热力学是研究能量转换和传递的学科,它在机械工程中应用广泛,例如在汽车发动机和发电机中。
流体力学是研究流体运动和力学性质的学科,它在航空航天和水力发电等领域中有着重要的应用。
总之,机械工程中的运动学和动力学分析是理解和优化机械系统运动和能量转换的重要工具。
它们帮助工程师设计和改进各种机械设备,从而提高效率、可靠性和安全性。
随着科技的不断进步,机械工程将继续发展和创新,为人类社会带来更多的机械设备和技术的突破。
第二章挖掘装置运动学及动力学分析2.1 挖掘装置的结构及工作特点挖掘装载机反铲工作装置的结构,其基本型式见图 2-1 所示。
图2-1反铲结构简图工作特点:反铲工作装置主要用于挖掘停机面以下的土壤,其挖掘轨迹决定于各液压缸的运动及其相互配合的情况。
当采用动臂液压缸工作进行挖掘时(斗杆、铲斗液压缸不工作可以得到最大的挖掘半径和最大的挖掘行程,此时铲斗的挖掘轨迹系以动臂下铰点 C 为中心,斗齿尖 V 至 C 的距离|CV|为半径而作的圆弧线,其极限挖掘高度和挖掘深度(不是最大挖掘深度,分别决定于动臂的最大上倾角和下倾角(动臂对水平线的夹角,也即决定于动臂液压缸的行程由于这种挖掘方式时间长,并且稳定条件限制了挖掘力的发挥,实际工作中基本上不采用。
当仅以斗杆液压缸工作进行挖掘时,铲斗的挖掘轨迹系以动臂与斗杆的铰点 F 为中心,斗齿尖 V 至 F 的距离|FV|为半径所作的圆弧线,同样,弧线的长度与包角决定于斗杆液压缸的行程。
当动臂位于最大下倾角时,可以得到最大挖掘深度,并且有较大的挖掘行程,在较硬的土质条件下工作时,能够保证装满铲斗,故中小型挖掘机构在实际工作中常以斗杆挖掘进行工作。
反铲装置如果仅以铲斗液压缸工作进行挖掘时,挖掘轨迹则为以铲斗与斗杆的铰点 Q 为中心,该铰点 Q 至斗齿尖 V 的距离|QV|为半径所作的圆弧线。
同理,圆弧线的包角( 铲斗的转角及弧长决定于铲斗液压缸的行程(|GH|–|GH|)。
显然,以铲斗液压缸进行挖掘时的挖掘行程较短,如使铲斗在挖掘行程结束时能够装满土壤,需要有较大的挖掘力以保证能够挖掘较大厚度的土壤。
所以,一般挖掘机构的斗齿最大挖掘力都在采用铲斗液压缸工作时实现。
用铲斗液压缸进行挖掘常用于清除障碍,挖掘较松软的土壤以提高生产率,因此在一般土方工程机械中(土壤多为Ⅲ级土以下,转斗挖掘最常采用。
在实际挖掘中,往往需要采用各种液压缸的联合工作。
例如,当挖掘基坑时,由于挖掘深度较大,并且要求有较陡而且平整的基坑壁时,需要采用动臂与斗杆两种液压缸的同时工作;当挖掘到坑底时,挖掘行程将结束,为加速将铲斗装满土,以及挖掘过程需要改变切削角,需要采用斗杆与铲斗液压缸同时工作。
当然,这种动作能否实现还取决于液压系统的设计。
当反铲装置的结构形式及尺寸已定时,即可用作图法求出挖掘包络图,即挖掘机构在工作位置时,所能控制到的作业范围。
对反铲工作装置而言,包络图中可能有部分区域靠近甚至深入到挖掘机构停机点以下,这一范围的土壤虽能挖及,但可能引起土壤的崩塌而影响作业的稳定性和安全性,除有条件的挖沟作业外,一般不使用。
挖掘机构的最大挖掘力除决定于液压系统的压力、液压缸的尺寸,以及各液压缸间作用力的影响(液压缸闭锁能力的限制外,还受整机稳定性和附着性的影响。
因此,工作装置不可能在任何位置都能发挥其最大挖掘力。
反铲工作装置一般采用转斗卸土,卸载较准确、平稳,便于装车工作。
2.2 挖掘机构的设计原则1.满足主要工作尺寸及作业范围的要求,在设计时应考与同类机型相比时的先进性,性能与主参数应符合国家标准之规定。
2.满足整机挖掘力大小及分布情况的要求。
3.功率利用情况好,理论工作循环时间短。
4.确定各铰点布置,结构形状应尽可能使受力状态有利,在保证刚度和强度的前提下,重量越轻越好。
5.应考虑到通用性和稳定性。
6.运输或停放时应有合理的姿态。
7.液压缸设计应考虑到三化,采用系列参数。
8.工作装置应安全可靠,拆装维修方便。
9.满足特殊使用要求。
2.3 挖掘机构运动学分析2.3.1 动臂机构参见图 2-1,反铲工作考虑到主要作业区域在地面以下,为有利于挖深,一般常选用弯动臂,考虑到动臂强度,弯角α一般不宜太小,推荐取 120°~140°。
角度α一般不小于 45°,同样有利于地面以下作业。
初步设计常取 K=L/L,(ZF/ZC)=1.1~1.3或 B、Z 点重合,考虑到变形的需要可取K=1.1~1.9为结构的宜于实现,动臂的仰角一般不大于 45°,俯角一般不小于-52°,保证△ABC 在运动过程中均成立。
考虑到动臂液压缸的稳定性,一般常取伸缩比为:λ=1.6~1.7,对通用式挖掘机构常取:L=(0.5~0.6·L,动臂与斗杆的长度比 K=l/l,可在很大范围内变动,一般为:K>2 称为长动臂短斗杆方案;K<1.5 称为短动臂长斗杆方案;K=1.5~2 时称为中间方案。
动臂液压缸的力臂比:K=e/e=(动臂缸全伸时对C点的力臂/(动臂缸全缩时对 C 点的力臂,专用反铲要求地面以下挖掘时,动臂液压缸能有足够的闭锁力距,可以取K<0.8,考虑到以反铲为主的通用式挖掘机构,并适当照顾其它换用装置,保证地面以上作业时能有足够的提升力矩,常取K=0.8~1.1。
在设计动臂机构及选用动臂油缸时,应考虑到动臂液压缸作用力之要求,要求应保证反铲作业过程中在任何位置上都能提起带有满载斗的工作装置到达最高和最远的位置。
计算时,可选用下述三个位置:从最大挖深处提起满载斗;从最大挖远处提起满载斗;从最大卸高处提起满载斗。
动臂液压缸应有足够的闭锁力,保证斗杆或铲斗挖掘力充分发挥本文采用动臂缸置于动臂上方,且动臂为整体直动臂的方案。
2.3.2 斗杆机构确定斗杆液压缸铰点位置、行程及力臂比时应当考虑以下因素:1.保证斗杆液压缸产生足够的斗齿挖掘力。
一般来说希望液压缸在全行程中产生的挖掘力始终大于正常挖掘阻力;液压缸全伸全缩时的作用力都应足以支撑满载斗和斗杆静止不动;液压缸作用力臂最大时产生的挖掘力应大于要求克服的最大挖掘阻力。
2.液压缸应有必要的闭锁能力。
要求在主挖区内铲斗挖掘力能够得到充分的发挥。
3.保证斗杆的摆角范围。
对于通用式挖掘机构,斗杆的摆角范围大致为100°~120°,在满足工作范围和运输要求的前提下,此值应尽可能的小些。
一般来说,斗杆越长摆角范围也可越小。
当斗杆、铲斗液压缸全伸时,斗前壁与动臂之间的距离应大于 10cm。
斗杆上∠EFQ 取决于结构因素,考虑到作业范围,一般取为130°~170°。
斗杆液压缸在全行程中,应保证△DEF 均成立。
2.3.3 铲斗连杆机构反铲铲斗机构通常采用六连杆机构,如图 2-1 所示。
铲斗在挖掘时的转角大致为90°~110°,为了满足开挖和最后卸载及运输状态之要求,铲斗总的转角往往要达到 150°~180°。
当铲斗缸全缩时,齿尖Ⅴ可能在 FQ 延长线上,或者,在其上侧0°~30°处,在个别情况下,为了适应挖掘深沟及垂直侧壁的作业要求,为不使斗底先于斗齿接触土壤,常采用大仰角机构,此时,仰角可达 25°~45°。
铲斗机构挖掘力之要求:要求铲斗最大理论挖掘力应与铲斗挖掘最大阻力相适应,当铲斗以15°~20°的仰角开挖时,最大挖掘力一般应出现在 FQ 延长线下侧 25°~35°处,也即铲斗挖掘时转角行程的一半处,此时,挖掘土壤的厚度最大,挖掘阻力也最大。
图2-2转斗挖掘阻力此外,要求连杆机构在液压缸的全行程中均能成立,为保证铲斗液压缸的稳定性,取λ=1.45 ~ 1.65 ,∠ KQV=95 °~ 120 °,K=l/l=0.3~0.38,当铲斗转角较大时K可取小些,液压缸闭锁力应保证斗杆挖掘力的正常发挥。
连杆机构最大传动比及其所发生的位置可以使用黄金分割法(0.618 法计算求出。
2.4 挖掘机构动力学分析2.4.1挖掘阻力的计算图2-3大曲率切削阻力实验曲线反铲装置工作时,既可用铲斗液压缸挖掘(简称转斗挖掘),也可用斗杆液压缸挖掘(简称斗杆挖掘),或作复合动作挖掘。
一般认为,斗容量小于 0.5 米或在土质松软时以转斗挖掘为主,反之以斗杆挖掘为主。
1.铲斗挖掘阻力的计算参照《单斗液压挖掘机》2-35,转斗挖掘时,挖掘阻力的切向分力可表示为:(2-1式中各参数的含义分别为:C:土壤硬度系数,对二级土,C=50~80R:转斗切削半径,取 R=l3,单位:厘米B:切削刃宽度影响系数,B=1+2.6b,b 为铲斗平均宽度:铲斗瞬时转角,单位为度A:切削角变化影响系数,一般取 A=1.3Z:斗齿系数,有齿时,Z=0.75;无齿时,Z=1D:与斗容量 q 有关,估算 q=0.1~0.2m时,D =5000~8000当=时,得最大挖掘阻力(2-2平均挖掘力按平均厚度下的阻力计算:近似取 W=(70~80%·W试验证明法向挖掘阻力 W的指向是可变的,数值也较小,一般W=0~0.2 W土质越均匀W越小,从随机统计的角度看,取法向分力W为零来简化计算是可以的。
这样W就可以看作为铲斗挖掘的最大阻力。
2.斗杆挖掘阻力的计算:(2-3)对Ⅱ级土,K=6~13,ψg为挖掘过程中的总转角,一般为ψg=50°~80°2.4.2 工作液压缸的理论挖掘力挖掘力是指当反铲作业时在铲斗齿尖上可能主动发挥的挖掘能力,它是衡量反铲装置挖掘性能的重要指针之一。
工作液压缸的理论挖掘力是指由该液压缸的理论推力所能产生的斗齿切向挖掘力。
1.铲斗挖掘时,铲斗缸的理论挖掘力P=P·i= P*r r/r=f(L)(2-4)P为铲斗缸理论推力,P=F·p,F为大腔作用面积,p 为系统工作压力。
i=i时,得最大理论挖掘力 P= P·i2.斗杆挖掘时,斗杆缸的理论挖掘力P=P·r/r=f(L,L) (2-5P为斗杆缸理论推力,r是L的函数,r是L的函数,所以P是L和L的函数。
2.4.3 整机理论挖掘力参见图 2-4,已知条件:整机重量 G,重心坐标(x,y,斗容 q,地面附着系数μ,三组液压缸的工作压力 P 和闭锁压力 P,除反铲装置外机体重量 G及重心位置坐标(x,y,反铲装置各零部件的重量 G及重心位置坐标(x,y,前轮及支腿着地点 O和 O的位置参数 x和 x,三组液压缸的缸径D、D和D,活塞杆直经 d、d和 d3,液压缸的伸缩比λ、λ和λ。
图2-4整机结构简图1.斗杆挖掘:在给定工况(L,L,L的情况下,计算斗杆的实际挖掘力时,应当考虑到下列因素的影响:①动臂液压缸闭锁能力对斗杆挖掘力的限制。
②斗杆主动挖掘力的限制。
③铲斗液压缸闭锁能力对斗杆挖掘力的限制。
④整机向前倾翻对斗杆挖掘力的限制。
⑤整机向后倾翻对斗杆挖掘力的限制。
⑥整机对地面的前后滑移对斗杆挖掘力的限制。
现分别计算如下:1动臂液压缸闭锁力限制的最大斗杆挖掘力 P液压缸闭锁力则指挖掘工况下某些液压缸被动状态所能承受的作用力,它是挖掘力发挥的重要影响因素之一。