国产激光雷达性能参数
- 格式:docx
- 大小:245.07 KB
- 文档页数:5
aari激光雷达指标-回复激光雷达是一种通过发射激光束并测量返回的信号来感知周围环境的传感器。
它在物体检测与跟踪、自动驾驶、环境感知等领域发挥着重要作用。
在激光雷达的应用过程中,有许多指标需要考虑,包括测量范围、分辨率、精度、抗干扰能力等。
本文将详细介绍激光雷达的常见指标,并一步一步解析其意义和影响。
首先,测量范围是指激光雷达能够有效测量到目标的最远距离。
在自动驾驶等应用中,激光雷达的测量范围越广,便能够提供更大的感知范围,从而具备更高的安全性和可靠性。
测量范围受到激光器功率、接收器灵敏度以及环境因素的影响。
激光器功率越高、接收器灵敏度越好,测量范围就越大。
而在恶劣的环境条件下,如强光干扰、雨雪等,激光雷达的测量范围可能会受到限制。
其次,分辨率是指激光雷达能够区分不同目标或物体的能力。
激光雷达的分辨率取决于发射激光束的宽度和接收器的采样率。
发射激光束的宽度越窄、采样率越高,激光雷达的分辨率就越高。
高分辨率可以帮助激光雷达准确检测到细小的目标,并提供更精细的环境感知信息。
第三,精度是指激光雷达测量结果与实际值之间的误差。
激光雷达精度的测量方式通常采用距离误差和角度误差两个指标。
距离误差是指测量值与实际距离之间的差值,而角度误差是指测量值与实际角度之间的差值。
精度受到激光器输出功率稳定性、接收器灵敏度、系统校准等因素的影响。
通过精确的校准和控制,可以减小激光雷达的测量误差,提高其精确度。
此外,抗干扰能力是指激光雷达在复杂环境中能够抵御外界干扰的能力。
外界干扰可能包括强光、尘埃、雨雪等影响激光传播和接收的因素。
抗干扰能力的评估指标一般包括动态范围、鲁棒性以及工作频率等。
动态范围是指激光雷达能够同时测量的最大和最小信号强度之间的差值,鲁棒性是指激光雷达在面对外界干扰时的稳定性和可靠性,而工作频率则涉及到激光雷达与其他系统进行频率调和的能力。
综上所述,激光雷达的指标涵盖了测量范围、分辨率、精度和抗干扰能力等方面。
自制直接探测多普勒测风激光雷达的总体结构和技术参数介绍引言风是研究大气动力学和气候变化的一个重要参量,利用风的数据,可以获得大气的变化,并预见其改变,促进人类对能量、水、气溶胶、化学和其它空气物质圈的了解,提高气象分析和预测全球气候变化的能力。
目前的风场数据主要来源于无线电探空测风仪、地面站、海洋浮标、观测船、飞行器以及卫星,它们在覆盖范围和观测频率上都存在很大限制。
对全球进行直接三维风场测量已经提到日程上来,世界气象组织提出了全球范围的高分辨率大气风场数据的迫切需要,迄今为止,多普勒测风激光雷达是唯一能够获得直接三维风场廓线的工具,具有提供全球所需数据的发展潜力[1]。
激光雷达是探测大气的有力工具,随着激光技术、光学机械加工技术、信号探测、数据采集以及控制技术的发展,激光雷达技术的发展也日新月异。
多普勒测风激光雷达具有实用性、高分辨率和三维观测等优点,是其它探测手段难以比拟的[2,3,4]。
新研制的1064 nm直接探测多普勒测风激光雷达,利用双边缘技术对对流层三维风场进行探测[5]。
本文介绍了该激光雷达的总体结构及其各部分的功能,并对其探测对流层风场的初步结果进行了分析和讨论。
1 总体结构和技术参数1064 nm直接探测多普勒测风激光雷达从整体上由激光发射单元、二维扫描单元,回波信号接收单元、信号探测和数据采集单元及控制单元五部分组成,其结构示意图和外观照片分别见图1和图2,主要的技术参数见表1。
激光发射单元、回波信号接收单元、信号探测和数据采集单元放置在光学平台上,保证其光学稳定性。
Nd:YAG激光器的中心波长是1064 nm,工作在此波长,可以有较大的激光输出功率,并且气溶胶的后向散射截面比较大。
脉冲重复频率为50 Hz,可以节省探测的时间,能捕捉短时间内风速的变化,有利于提高风速探测的准确度。
同时,激光器内部注入种子激光可以保证激光器的频率稳定。
二维扫描单元安置在实验房的房顶,接收望远镜的上方。

目录关于说明书 (1)安全提示 (2)1产品介绍 (8)1.1工作原理 (8)1.2结构描述 (9)1.3线束分布 (10)1.4技术参数 (12)2安装 (14)2.1机械安装 (14)2.2接口 (18)2.3接线盒(选配) (21)2.4使用 (26)3数据格式 (27)3.1点云数据包 (28)4网页控制 (41)4.1首页(Home) (42)4.2参数设置(Settings) (44)4.3点云输出角度设置(Azimuth FOV) (52)4.4运行状态数据(Operation Statistics) (55)4.5电气参数监测(Monitor) (56)4.6升级(Upgrade) (57)4.7运行日志(Log) (58)4.8安全(Security) (59)4.9登录(Login) (69)5通信协议 (70)6仪器维护 (71)7故障排查 (73)附录 I 线束分布数据 (77)附录 II 点云数据的绝对时间 (85)附录 III 供电指导 (92)附录 IV 法律申明 (94)关于说明书使用产品前,请务必仔细阅读本说明书,并遵循说明书的指示操作产品,以避免导致产品损坏、财产损失、人身损害和/或违反产品保修条款。
■获取渠道可通过以下方式获取说明书最新版本:·访问禾赛科技官网的“下载”页面:https:///cn/zh/download·或联系禾赛科技销售人员·或联系禾赛科技技术支持:*********************■技术支持如果遇到说明书无法解决的问题,请通过以下方式联系我们:*********************https:///cn/zh/supporthttps:///HesaiTechnology(产品数据解析及源代码相关的问题,均可在对应的GitHub项目中提交)■ 图例警示:务必遵循的安全指示或正确操作方法注意:补充信息,以便更好地使用产品安全提示·请查看产品铭牌上的认证信息,并查询相应的认证警语。

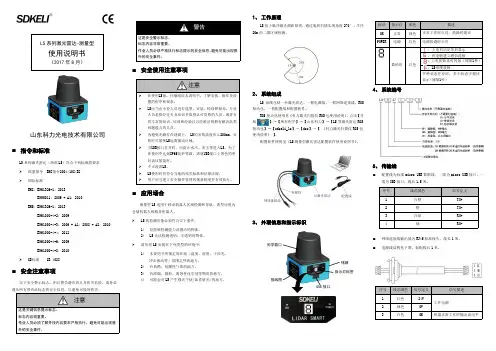
LS系列激光雷达-测量型使用说明书(2017年8月)山东科力光电技术有限公司⏹指令和标准LS系列激光雷达(简称LS)符合下列标准的要求欧盟指令EMC指令2004/108/EC国际标准EMI:EN61326-1:2013EN55011:2009+A1:2010EMS:EN61326-1:2013EN61000-4-2:2009EN61000-4-3:2006+A1:2008+A2:2010EN61000-4-4:2012EN61000-4-6:2009EN61000-4-8:2010GB标准GB4028⏹安全注意事项以下安全警示标志,用以警告潜在的人身伤害危险,请务必遵从所有带有此标志的安全信息,以避免可能的伤害。
注意这是关键信息提示标志。
标志内容很重要。
作业人员必须了解并按内容要求严格执行,避免可能出现意外的安全事件。
警告这是安全警示标志。
标志内容非常重要。
作业人员必须严格执行标志提示的安全信息,避免可能出现意外的安全事件。
⏹安全使用注意事项注意在使用LS前,仔细阅读本说明书,了解安装、操作及设置的程序和要求。
LS应当由专业人员进行选型、安装、检修和保养。
专业人员是指经过专业培训并取得认可资格的人员,或者有着丰富的知识、培训和经验且已经被证明拥有解决此类问题能力的人员。
为避免光路打在地面上,LS的安装高度应≧200mm。
安装时尽量使LS远离振动区域。
当USB接口打开时,应防止水汽、灰尘等进入LS。
为了在使用中达到IP65防护等级,请将USB接口上黑色的密封盖压紧盖好。
不可跌落LS。
LS使用时应符合当地的相关标准和法律法规。
用户应当建立安全操作管理的规章制度并有效执行。
⏹应用场合测量型LS适用于移动机器人区域检测和导航,典型应用为仓储机器人和服务机器人。
LS的检测对象必须符合以下条件:1)仅能够检测能力范围内的物体。
2)LS无法检测透明、半透明的物体。
请勿将LS安装在下列类型的环境中:1)本说明书所规定的环境(温度、湿度、干涉光、冲击振动等)范围之外的地方。

国产激光雷达性能参数1. 测量范围(Measurement Range):测量范围是指激光雷达可以有效测量目标距离的范围。
国产激光雷达通常具有不同的测量范围,最常见的是100米、200米、300米等,同时还有更远的测量范围可达到1000米以上。
2. 测量精度(Measurement Accuracy):测量精度是指激光雷达测量的结果与真实值之间的偏差。
国产激光雷达通常具有较高的测量精度,一般可达到毫米级别。
3. 视场角(Field of View):视场角是指激光雷达可以实时感知的水平和垂直角度范围。
国产激光雷达通常具有较大的视场角,可以实现全方位的目标检测和感知。
4. 视场分辨率(Field of View Resolution):视场分辨率是指激光雷达在视场角范围内可以感知的最小角度间隔。
国产激光雷达通常具有较高的视场分辨率,可以提供更详细和准确的目标信息。
5. 刷新率(Refresh Rate):刷新率是指激光雷达每秒钟可以发送和接收的激光脉冲数。
国产激光雷达通常具有较高的刷新率,一般可达到几百Hz甚至更高。
6. 反射率(Reflectivity):反射率是指目标表面对激光光束的反射程度。
国产激光雷达通常具有较高的反射率,可以感知不同类型和材质的目标。
7. 解析度(Resolution):解析度是指激光雷达能够分辨和测量目标的最小尺寸。
国产激光雷达通常有较高的解析度,可以检测和测量较小的目标,比如道路标识、行人和小型障碍物等。
8. 伪目标抑制(False Target Suppression):伪目标抑制是指激光雷达可以识别和排除不真实或误导性目标的能力。
国产激光雷达通常具有较好的伪目标抑制能力,可以提高目标检测和识别的准确性。
9. 工作温度范围(Operating Temperature Range):工作温度范围是指激光雷达可以正常工作的环境温度范围。
国产激光雷达通常具有较宽的工作温度范围,可以适应不同的气候和环境条件。
国产激光雷达性能参数 The manuscript was revised on the evening of 2021激光雷达最早的定义是 LIDAR,英文为 Light Deteation and Ranging,中文意思是「光的探测和测距」。
其实更准确的一个定义是 LADAR:LAser Detection and Ranging,即「激光的探测和测距」。
这是在 2004 年提出的定义,更符合激光雷达的概念。
激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显:1、具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率;2、抗干扰能力强:激光波长短,可发射发散角非常小(μrad量级)的激光束,多路径效应小(不会形成定向发射,与微波或者毫米波产生多路径效应),可探测低空/超低空目标;3、获取的信息量丰富:可直接获取目标的距离、角度、反射强度、速度等信息,生成目标多维度图像;4、可全天时工作:激光主动探测,不依赖于外界光照条件或目标本身的辐射特性。
它只需发射自己的激光束,通过探测发射激光束的回波信号来获取目标信息。
但是激光雷达最大的缺点——容易受到大气条件以及工作环境的烟尘的影响,要实现全天候的工作环境是非常困难的事情。
激光雷达在无人驾驶中的功能:第一是路沿检测,也包括车道线检测;第二是障碍物识别,对静态物体和动态物体的识别;第三是定位以及地图的创建。
一款好的激光雷达设备都有哪些评判标准呢?“单位时间出点数、点云测量精度、测距范围三方面的具体性能直接决定了激光雷达设备品质的好坏”。
激光雷达详细的参数如下:线束………… 16线波长………… 905nm激光等级………… class 1精度…………±2cm(典型值)测距………… 20cm~150m(目标反射率40%)出点数………… 320,000pts/s垂直测角………… 30°垂直角分辨率………… o水平测角………… 360o水平角分辨率………… o至o转速………… 300-1200rpm (5-20Hz)输入电压………… 9-32VDC产品功率………… 9w(典型值)防护安全级别………… IP67操作温度………… -10~60°C规格………… H:*φ:109mm重量………… (不包含数据线)采集数据…………三维空间坐标/反射率激光雷达生产复杂,价格高昂也是行业普遍面对的问题通过深圳在高端制造商的积累解决这个问题。
车载激光雷达核心性能参数及分类标准近年来,(智能)汽车的发展极大地推动了激光雷达产业的热度,目前国内外在激光雷达领域布局的公司越来越多。
激光雷达是一种发射光束并接收回波获取目标三维信息的系统,已经有着几十年的应用历史。
激光雷达系统复杂,应用场景多样,多种技术路线并存,因此,对激光雷达性能的评价不是一个简单的问题,尤其是一些参数容易混淆,如探测精度、探测准确度、探测分辨率、帧频和点频等。
由于还没有统一的标准,不同厂家在宣传中选择的参数并不完全一样。
实际上,并非所有的参数都是激光雷达的核心参数,还有一些参数之间存在较强的关联性。
如果不能正确认识这些参数的含义、相互关系、决定因素,很可能被个别高性能指标所迷惑,而无法了解激光雷达的真实性能。
本文选择车载激光雷达的关键性能参数,对这些参数的定义、计算方法、相互关系、决定因素等进行了梳理和归纳,可以帮助用户更好地使用激光雷达,对激光雷达的设计也有指导意义。
车载激光雷达核心性能参数及分类对车载激光雷达的评价通常涉及到性能、可靠性以及应用等方面。
用户关心的参数很多,包括:激光波长、探测距离、视场角(垂直+水平)、测距精度、角分辨率、出点数、线束、安全等级、输出参数、防护等级、功率、(供电)电压、激光发射方式、使用寿命等。
但激光雷达功能上是一种距离测试系统,其核心性能应围绕测试的速度、测试的空间范围、测试分辨率、测试的准确度、测试的重复度几方面来评价。
依据这个原则,通常认为激光雷达的核心性能参数有帧频、最大探测距离和最小探测距离、视场角、距离分辨率、水平角分辨率、垂直角分辨率、点频以及测距精度和测距准确度。
根据现有激光测距仪相关标准查询,参数定义为:重复频率:每秒钟完成的测距次数。
测距范围:在规定大气条件下,对规定目标达到规定的测距准确度时,能探测到的最远/近距离。
水平视场角:在水平方向上最大方位扫描角度θx。
垂直视场角:在垂直方向上最大方位扫描角度θγ。
距离分辨率:在光束传播方向上能够区分两个目标之间的最小距离间隔。
激光雷达行业非常广阔,每个细分方向都可以大有所为。
就单线激光雷达而言,致力于解决好机器人的自主定位导航能力,能突破的道路只有一条:以实用性和可靠性作为第一考虑,而非一味的去追求参数。
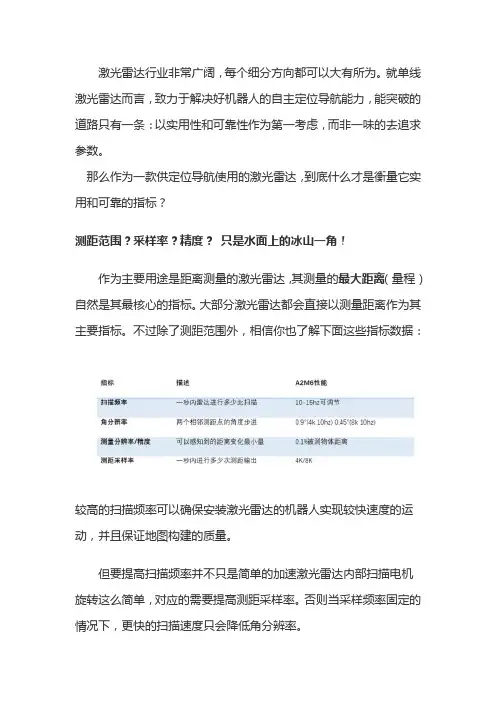
那么作为一款供定位导航使用的激光雷达,到底什么才是衡量它实用和可靠的指标?测距范围?采样率?精度?只是水面上的冰山一角!作为主要用途是距离测量的激光雷达,其测量的最大距离(量程)自然是其最核心的指标。
大部分激光雷达都会直接以测量距离作为其主要指标。
不过除了测距范围外,相信你也了解下面这些指标数据:较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。
但要提高扫描频率并不只是简单的加速激光雷达内部扫描电机旋转这么简单,对应的需要提高测距采样率。
否则当采样频率固定的情况下,更快的扫描速度只会降低角分辨率。
除了测距距离、扫描频率之外,测量分辨率和精度对于激光雷达性能来说同样重要,并且对于三角测距激光雷达而言,也更具有挑战。
由于测量原理的关系,虽然一般在10米以内都可以实现很高的测距分辨率,但其分辨率亦会随着探测物体距离增加而剧烈下降。
因此,为了实现更远距离的探测,就不只是增加激光器功率这么简单了,需要对于测距核心有本质的改良。
同时为了可靠量产,也需要做很多的配套工作。
上面列举的这些性能指标都是大家所知道的,自然也是激光雷达厂家长久以来一直在不断追求和突破的。
不过,这个并不是说要盲目的追求这些指标的提高,而是要像前面所说,要更加看重整体产品的实用和可靠性,更好的参数不一定能带来更好的产品,可能还会带来其他方面的缺失。
所以现在,我们来聊聊你可能不熟悉的激光雷达的一面,也是在选择激光雷达产品时所需要注重考虑的因素。
水下的冰山-日光抗击能力和深色物体检出率除了上述测距距离、采样率、精度等大家都熟知的性能指标外,在雷达实际使用中还有两个非常重要但往往不太被大家了解的性能指标:深色物体检出率环境光抗干扰能力在实际工作中,很多应用环境中的物体大多不是白色墙面,而是深色的,如家具,暗色的墙纸。
机载激光雷达选择参考目前市场上销售的机载激光雷达来自多个厂家,有多种品牌和种类。
那么,如何从中选择技术先进、性价比好、故障少又售后服务完善的设备呢?一、机载激光雷达系统生产厂家介绍目前提供机载激光雷达设备的厂家主要有:徕卡、Optech(加拿大)、IGI、天宝、TopEye和Riegl。
这些厂家的特点是什么呢?(a)自己生产机载激光扫描仪,然后购买其他厂家的GPS/IMU及硬件和软件,集成机载激光雷达。
这类厂家有徕卡,Optech(加拿大),Topeye(瑞典)和Riegl(奥地利)。
在这些生产激光扫描仪的厂家中,生产规模最大的和研究能力最强的是Riegl公司,他向许多厂家提供了一系列产品,如:LMS-Q系列机载激光扫描仪:LMS-Q240, LMS-Q280, LMS-Q120i,LMS-Q160(超轻型,防摔型,无人机专用)等。
新型的具备数字化全波形数据获取和实时处理能力的VQ系列机载激光扫描仪:VQ180, VQ280, VQ480,LMS-Q560和VQ680i等。
目前,徕卡只生产一种激光扫描仪,而其他厂家也大多只生产两款机载激光扫描仪作为自己的系统集成使用。
Optech虽然能够生产具备数字化全波形数据的激光扫描仪,但不是标准配置,用户需要另外付费。
但即便如此,也已经落后Riegl公司六年。
这里还要指出的是:徕卡公司在2005年前一直使用的是加拿大Applanix POS系统,由于美国的禁运政策,向中国出口的POS系统都进行了许多修改,性能明显下降,并且伴随不稳定的情况。
为了保证激光雷达性能的可靠性,徕卡在2004年后测试了许多不同公司(包括Honeywell)的POS系统。
在2005年7月又从加拿大TerraMatics公司(1998年成立)购买了其POS系统的IP(知识产权),避开北美区域,由自己(在瑞士)来研发和委托生产型号为iPAS 的POS系统。
目前国内所销售的徕卡的ALS50-ii和60系统基本都是配置iPAS定位系统。
激光雷达iso标准激光雷达ISO标准:意义、内容与影响一、引言随着自动驾驶、机器人、无人机等领域的飞速发展,激光雷达(LiDAR)作为一种核心传感器件,在这些领域的应用日益广泛。
为确保激光雷达产品质量的可靠性与稳定性,制定并遵循统一的国际标准显得尤为重要。
本文将详细解析激光雷达的ISO标准,包括其意义、主要内容和可能对行业产生的影响。
二、激光雷达ISO标准的意义ISO是国际标准化组织的简称,其制定的标准具有权威性、公正性和广泛认可性。
对于激光雷达而言,ISO标准的出台意味着:1.产品质量保障:ISO标准为激光雷达设立了统一的质量门槛,确保市面上的产品达到一定的性能和质量水平。
2.行业规范化:统一的国际标准有助于规范激光雷达市场秩序,减少劣质产品的流通。
3.促进技术创新:遵循ISO标准将鼓励企业加大研发投入,以满足或超越标准要求,进而推动整个行业的技术进步。
三、激光雷达ISO标准的主要内容激光雷达ISO标准涵盖了以下几个方面的主要内容:1.术语和定义:明确激光雷达相关术语的定义,为后续的标准制定提供统一的语言基础。
2.性能参数:规定激光雷达的关键性能参数,如测距精度、角分辨率、扫描频率等,以及相应的测试方法。
3.环境适应性:对激光雷达在不同环境条件(如温度、湿度、振动等)下的性能表现提出要求。
4.安全性和可靠性:要求激光雷达在正常工作条件下具有足够的安全性和可靠性,如防水、防尘、抗干扰等能力。
5.兼容性和互通性:鼓励不同厂家、不同型号的激光雷达在数据格式、通信协议等方面具有兼容性和互通性,以降低系统集成难度。
四、激光雷达ISO标准的影响激光雷达ISO标准的实施将对整个行业产生深远影响:1.提升产品质量:遵循ISO标准将有助于提升整个行业的激光雷达产品质量,增强消费者信心。
2.促进市场竞争:ISO标准将成为市场竞争的一个重要依据,促使企业不断提高产品性能和质量。
3.加强国际合作:统一的国际标准将促进不同国家、地区之间的激光雷达企业加强合作与交流。
HR460LA参数1. 简介HR460LA是一种高性能的激光雷达传感器,用于环境感知和障碍物检测。
它采用先进的激光技术,能够提供精确的三维环境图像,并且具有较长的测量范围和高分辨率。
该传感器广泛应用于自动驾驶、机器人导航、智能交通等领域。
2. 技术特点2.1 高精度测距HR460LA采用了先进的激光测距技术,能够实现高精度的距离测量。
其测距范围可达到460米,误差小于5厘米。
这使得它在各种复杂环境下都能够准确地检测到障碍物,并为导航系统提供可靠的数据支持。
2.2 高分辨率图像该传感器还具有高分辨率图像输出功能。
它可以生成每秒超过500,000个点云数据,并以每秒10帧的速度输出。
这使得HR460LA能够捕捉到目标物体的细节信息,并提供清晰、真实的环境图像。
2.3 多功能应用HR460LA不仅可以用于静态环境感知,还可以实现动态目标的实时检测和跟踪。
它能够识别并区分不同类型的物体,如车辆、行人、建筑物等,并提供相应的数据输出。
2.4 强大的抗干扰能力该传感器具有出色的抗干扰能力,能够在复杂的环境中稳定工作。
它采用了先进的光学设计和信号处理算法,有效地降低了外界干扰对测量结果的影响。
3. 应用场景3.1 自动驾驶HR460LA在自动驾驶领域具有广泛的应用前景。
它能够实时获取道路上的障碍物信息,并将其传输给自动驾驶系统进行决策和路径规划。
通过与其他传感器(如摄像头、雷达)结合使用,可以提高自动驾驶系统的安全性和可靠性。
3.2 机器人导航在机器人导航领域,HR460LA可以帮助机器人快速准确地感知周围环境,并规避障碍物。
它能够生成精确的地图,为机器人的路径规划和定位提供重要的参考数据。
3.3 智能交通HR460LA也可以应用于智能交通系统中。
它可以实时监测道路上的交通状况,并提供车辆、行人等目标物体的位置和运动信息。
这对于交通管理、事故预警等方面都具有重要意义。
4. 总结HR460LA是一款功能强大、性能优越的激光雷达传感器。
国产激光雷达性能参数 The manuscript was revised on the evening of 2021
激光雷达最早的定义是 LIDAR,英文为 Light Deteation and Ranging,中文意思是「光的探测和测距」。
其实更准确的一个定义是 LADAR:LAser Detection and Ranging,即「激光的探测和测距」。
这是在 2004 年提出的定义,更符合激光雷达的概念。
激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显:
1、具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率;
2、抗干扰能力强:激光波长短,可发射发散角非常小(μrad量级)的激光束,多路径效应小(不会形成定向发射,与微波或者毫米波产生多路径效应),可探测低空/超低空目标;
3、获取的信息量丰富:可直接获取目标的距离、角度、反射强度、速度等信息,生成目标多维度图像;
4、可全天时工作:激光主动探测,不依赖于外界光照条件或目标本身的辐射特性。
它只需发射自己的激光束,通过探测发射激光束的回波信号来获取目标信息。
但是激光雷达最大的缺点——容易受到大气条件以及工作环境的烟尘的影响,要实现全天候的工作环境是非常困难的事情。
激光雷达在无人驾驶中的功能:
第一是路沿检测,也包括车道线检测;
第二是障碍物识别,对静态物体和动态物体的识别;
第三是定位以及地图的创建。
一款好的激光雷达设备都有哪些评判标准呢?
“单位时间出点数、点云测量精度、测距范围三方面的具体性能直接决定了激光雷达设备品质的好坏”。
激光雷达详细的参数如下:
线束………… 16线
波长………… 905nm
激光等级………… class 1
精度…………±2cm(典型值)
测距………… 20cm~150m(目标反射率40%)
出点数………… 320,000pts/s
垂直测角………… 30°
垂直角分辨率………… o
水平测角………… 360o
水平角分辨率………… o至o
转速………… 300-1200rpm (5-20Hz)
输入电压………… 9-32VDC
产品功率………… 9w(典型值)
防护安全级别………… IP67
操作温度………… -10~60°C
规格………… H:*φ:109mm
重量………… (不包含数据线)
采集数据…………三维空间坐标/反射率
激光雷达生产复杂,价格高昂也是行业普遍面对的问题
通过深圳在高端制造商的积累解决这个问题。
4月18日,速腾宣布已经投入20多条生产线来量产多线激光雷达,并且预计1个季度后达到100条以上的产线规模。
线数越高,价格越高。
同理,通过耦合方案达到想要的线数,这样的话,比
2线、64线的价格要有优势。
激光雷达行业供货周期长
速腾聚创激光雷达供货周期在4周以内,快了很多。