基于DSP的大口径天文望远镜伺服控制的设计与实现
- 格式:pdf
- 大小:262.33 KB
- 文档页数:3


基于DSP 的数码望远相机的研究与设计近年来,随着半导体制造技术的发展和计算机体系结构等方面的改进,数字信号处理技术得到了迅速的发展和运用,DSP 芯片的功能越来越强大,数字信号处理已成为信号处理技术的主流。
结合光学仪器向光、机、电、算一体化和智能化现代光学仪器发展的趋势,设计了一款基于高性能DSP 芯片的同步可调式双筒望远数码相机。
1 设计的基本思路与基本原理望远数码相机的数码照相系统与望远系统相对独立,分立采光,按照望远物镜与数码照相镜头的入瞳直径相匹配的原则,设计计算出数码镜头与望远镜对3 m~无穷远目标进行成像的离焦对应曲线,采用中调手轮转动带动望远镜和数码镜头实现同步调焦,使远方同一景物目标通过望远物镜和数码镜头的成像同时同步清晰,使望远镜真正成为数码相机的光学取景器,再通过数码镜头像面位置处的CMOS 影像传感器实现观察目标图像信息的获取、存储、压缩以及数字图像的转换、显示和传输过程。
2 数码成像系统的设计与研究根据要求,采用了基于高性能DSP 芯片的数字图像信号处理技术,以实现对实时图像信息的获取、存储、转换和数字图像的传输与显示。
选择美国德州仪器公司(TI)的高性能多媒体处理芯片TMS320DM642 作为主处理器;SDRAM 选用Micron 公司T48LC4M32B-6;视频采集芯片则是Micron 的300 万像素的CMOS 图像传感器MT9T001;采用高效、稳定、可靠的嵌入式计算平台,数码照像系统结构框图如图1 所示。
由于CMOS APS 图像传感器在价格、性能和功耗等各方面都优于CCD 图像传感器,而且集成了很多图像处理功能,因此在本系统的视频采集模块设计中,选用了Micron 公司生产的CMOS APS 图像传感器芯片MT9T001。
MT9T001 是一款OxGA 格式(有效像素为2 048×1536)的CMOS 数字图像传感。
基于FPGA的DSP技术实现伺服控制器的应用方案与设计作者:晁智强,李华莹,陈强,苏力刚引言随着电液伺服控制理论的发展,很多先进的控制策略被应用于电液伺服控制领域中。
如:文献[1]阐述了基本运算为不完全微分PID的滤波型二自由度控制算法,针对飞行仿真转台用液压伺服系统的特点进行了仿真研究。
文献[2]研究了基于RBFNN的PID控制在电液位置伺服系统中的应用。
文献[3]对电液位置伺服系统采用滑模变结构控制,用最优控制理论设计滑模平面,均取得了良好效果。
但大量文献均是理论与仿真研究,大多的工业应用仍然以模拟电路实现PID控制算法为主,主要原因是实现这些先进的控制算法的方法目前都是由负责控制的下位机用程序实现的,而计算机易出现死机、掉电等情况,这使液压系统可靠性和安全性都降低。
介绍了一种用基于FPGA的DSP技术来设计电液伺服系统控制器的方法。
该方法克服了传统伺服控制器的一些不足,可将许多复杂的实时控制算法硬件化实现,并根据控制效果的优劣调整控制算法,从而提高了控制器的控制效果、运算速度和可靠性。
使用该方法,设计者不必十分了解FPGA(可编程逻辑门阵列)和VHDL(硬件描述语言),在Matlab中便可设计出需要的伺服控制器。
1现代DSP技术概述近几年来,应用数字信号处理技术设计的数字控制器被越来越多地应用到电液伺服系统中。
在过去很长的一段时间里,以美国TI公司TMS320系列为代表的DSP处理器几乎是数字信号处理应用系统的唯一选择。
但面对当今迅速变化的DSP应用市场,其硬件结构的不可变性,早已显得力不从心。
基于FPGA的现代DSP技术是用FPGA等可编程门阵列实现数字信号处理算法,它是一种面向对象的DSP系统,用户可根据需要来定制和配置自己的DSP系统。
但是,应用FPGA开发DSP系统专业性强,使其应用受到很大限制。
目前,在利用FPGA进行DSP系统的开发应用上,已有了全新的设计工具和设计流程,世界两大FPGA生产厂商Xilinx公司和Altera公司都相继推出了自己的DSP解决方案。

基于DSP的伺服控制技术针对目前主流船用光电跟踪设备对伺服驱动数字化、集成化要求,本文研究了基于CAN总线的伺服控制技术,设计了基于DSP的伺服控制系统。
采用DSP 作为主控制器,通过CAN总线与两个伺服驱动器节点连接,通过DSP编程实现伺服系统的PID闭环控制。
关键字:CAN总线DSP 伺服控制概述传统船用光电跟踪设备采用模拟伺服控制系统体积大、接口电路复杂、集成化程度较低,已难以满足舰船总体设计单位在舰船设备总体规划时对设备数字化、集成化的要求[1]。
本文提出了基于DSP和CAN总线的数字伺服控制设计方案。
1 系统设计船用光电跟踪设备由光电指向器和显控平台两大部分组成,光电指向器采用方位、俯仰两轴结构设计,内部集成了图像传感器及陀螺模块等。
整个光电系统按功能可分为图像显控系统和伺服控制系统两大部分组成。
本设计伺服控制系统由伺服控制单元、伺服驱动单元、伺服电机、测角单元及测速单元等功能模块组成,伺服控制系统功能框图如图1所示。
(1)伺服控制单元设计伺服控制系统采用TI公司TMS320F28335 DSP芯片为伺服控制单元,该芯片内置eCAN控制器,简化了CAN总线接口设计,只需添加CAN收发器芯片就可实现CAN总线通信。
本设计选用SN65HVD230芯片作为CAN总线收发器DSP连接。
CAN总线接口电路如图2所示。
同时由于光电跟踪设备应用于舰船环境,为了隔离船体的摇摆对图像造成的摇晃,光电指向器要求伺服控制具备自稳定功能。
系统选用光纤陀螺作为速度反馈,在DSP中根据陀螺速度进行PID运算,进而驱动光电指向器朝船体摇摆的反方向转动,以此抵消船体的摇摆。
选用SN65HVD08D接口芯片设计RS485接口电路与MEMS陀螺进行串行通信连接,接口电路原理图如图3所示。
(2)CAN通信软件设计CAN通信軟件设计分为三个功能模块,分别为CAN通信资源初始化,CAN 数据帧接收和CAN数据帧发送。
CAN通信资源初始化模块主要完成CAN通信邮箱初始化和定时器设置。
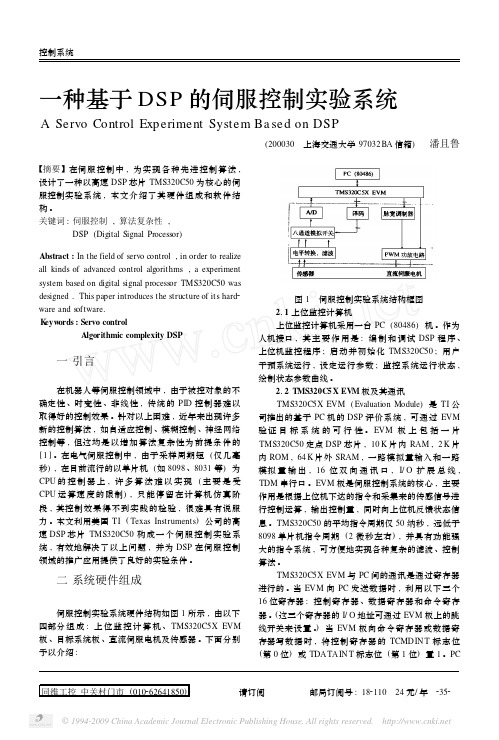
一种基于DSP的伺服控制实验系统A Servo Control Experiment System Based on DSP(200030 上海交通大学97032BA信箱) 潘且鲁【摘要】在伺服控制中,为实现各种先进控制算法,设计了一种以高速DSP芯片TMS320C50为核心的伺服控制实验系统,本文介绍了其硬件组成和软件结构。
关键词:伺服控制,算法复杂性,DSP(Digital Signal Processor)Abstract:In the field of servo control,in order to realize all kinds of advanced control algorithms,a experiment system based on digital signal processor TMS320C50was designed.This paper introduces the structure of its hard2 ware and software.K eyw ords:Servo controlAlgorithmic complexity DSP一引言在机器人等伺服控制领域中,由于被控对象的不确定性、时变性、非线性,传统的PID控制器难以取得好的控制效果。
针对以上困难,近年来出现许多新的控制算法,如自适应控制、模糊控制、神经网络控制等,但这均是以增加算法复杂性为前提条件的[1]。
在电气伺服控制中,由于采样周期短(仅几毫秒),在目前流行的以单片机(如8098、8031等)为CPU的控制器上,许多算法难以实现(主要是受CPU运算速度的限制),只能停留在计算机仿真阶段,其控制效果得不到实践的检验,很难具有说服力。
本文利用美国TI(Texas Instruments)公司的高速DSP芯片TMS320C50构成一个伺服控制实验系统,有效地解决了以上问题,并为DSP在伺服控制领域的推广应用提供了良好的实验条件。
基于DSP的光电稳定平台伺服控制系统设计的开题报告一、项目背景光电稳定平台是光学系统中基本的光学机械平台。
光电稳定平台是物体跟踪、导航、控制等功能的必备设备。
由于光学系统工作环境复杂,需要对光学系统进行高精度的稳定控制。
因此光电稳定平台控制系统需要具有高精度、高稳定性、高可靠性等特点。
基于DSP的控制技术具有高处理速度、高精度的特点,可以满足光电稳定平台伺服控制系统的需求。
此外,DSP的结构紧凑、功耗低、适用于嵌入式系统等特点,也使其成为控制系统设计的理想选择。
二、项目内容本课题的主要内容是基于DSP的光电稳定平台伺服控制系统的设计。
系统涉及的技术内容包括:机械结构设计、电路设计、程序设计、系统测试等。
具体包括以下几个方面:1. 基于光电稳定平台机械结构设计,并确定驱动、传感器等硬件设备。
2. 设计控制电路,实现伺服电机控制,包括电机驱动电路、信号处理电路、传感器信号采集电路等。
3. 编写控制程序,实现伺服电机控制,并对控制器进行调试和优化。
4. 对系统进行实验测试,包括基本功能测试、性能测试等,确保设计的系统满足设计要求。
5. 编写系统测试报告,分析系统实验结果,提出改进方案。
三、项目意义随着时代的发展和科技的进步,光学系统在军事、医疗、通信、环保等领域得到了广泛的应用,光电稳定平台作为光学系统中不可或缺的组成部分,对其的精准控制尤为重要。
因此,本设计的光电稳定平台伺服控制系统,可以满足光学系统的精准控制要求。
此外,设计中采用的DSP技术具有高精度、高速度、可靠性高等特点,对于DSP技术的研究和应用有很大的推动作用。
四、项目进度安排1. 第一阶段(前期准备):了解相关技术知识和理论基础,研究本设计中所需硬件和软件设备的选型和购买。
2. 第二阶段(系统设计):完成系统框架设计、控制电路设计、控制程序实现、机械结构设计等;3. 第三阶段(系统测试):进行基本功能测试、性能测试等,优化系统控制。
4. 第四阶段(论文编写):编写毕业设计论文及演示资料。
• 148•针对天文导航数据量大,处理速度要求高等特点,本文介绍了基于国产数字信号处理器FT-C6713/400的硬件设计方案,使用FPGA 及MCU 配合完成接口通信及星敏感器电机控制功能。
经测试,该系统能满足天文导航的需求,实现恒星目标的准确捕获及跟踪。
天文导航以空间位置已知、不可毁灭的自然天体作为导航信标,通过对天体的观测来确定飞行器的位置、航向和姿态等信息的导航技术。
具有隐蔽性好,工作稳定,定位、定向精度高,无累积误差等优点。
为了扩展天文导航定位技术的应用领域,天文导航设备目前正向体积小的嵌入式系统方向发展。
本文介绍了一种基于国产数字信号处理器(D S P )F T-C6713/400的天文导航系统硬件设计方案,DSP 是一种专门针对数字信号进行实时高速解算的特殊处理器,具有极强的处理性能、高度的灵活性和可编程性,同时外围集成了丰富的片上外设,可以方便的实现与外围设备的接口,缩小系统硬件平台的体积。
1 FT-C6713/400简介FT-C6713/400功能框图如图1所示。
从整体上可分为CPU 核心、片上外设和两级Cache 系统三个部分。
CPU 核心采用八流出超长指令字(简称VLIW )结构。
一级Cache 采用哈佛结构,拥有独立的程序Cache 和数据Cache ,只能作为高速缓存被CPU 访问,大小分别为4KB 。
二级Cache 是一个统一的程序/数据空间,可以整体作为SRAM 映射到存储空间,也可以整体作为二级Cache ,或是作为二者按比例的一种组合,二级Cache 相较于TI 公司的TMS320C6713B-GDPA200容量更大,可达到2MB 。
片上外设主要包括EDMA 控制器、EMIF (外部存储接口)、中断选择子、两个定时器、两个多通道缓冲串口和一个16位的主机接口、两个多通道音频串口(McASP )、两个I2C 接口、16位宽可独立控制的GPIO 接口;这些外设通过EDMA 总线和外设总线两条总线相连,二级Cache 有专门的数据通路与EMIF 相连;此外还有启动配置模块、电源管理模块等用于系统配置和自举控制的模块。
基于DSP的光电跟踪架伺服控制器的设计李兴红;张淑梅;续志军;张春林【期刊名称】《计算机测量与控制》【年(卷),期】2006(14)12【摘要】光电经纬仪是现代靶场中用来测量空中飞行目标参数的一种复杂贵重的精密测角仪器,其中伺服系统是经纬仪的重要组成部分;目前的经纬仪跟踪架伺服控制器通常是由PC104系统完成通讯、检测等功能,然而随着要求光电跟踪架功能的不断增加和检测精度的不断提高,因此这里从实用出发,设计了基于TMS320LF2407 DSP的伺服控制器;由于TMS320LF2407的特点,该控制器与PC104系统相比减小了体积,增加了可靠性,提高了运算速度和能力,并且该控制器应用在所内某型号经纬仪上效果很好,值得在相关的研究所中推广.【总页数】3页(P1632-1634)【作者】李兴红;张淑梅;续志军;张春林【作者单位】中科院,长春光学精密机械与物理研究所,吉林,长春,130033;中国科学院,研究生院,北京,10000O;中科院,长春光学精密机械与物理研究所,吉林,长春,130033;中科院,长春光学精密机械与物理研究所,吉林,长春,130033;中科院,长春光学精密机械与物理研究所,吉林,长春,130033【正文语种】中文【中图分类】TP3【相关文献】1.基于DSP的高精度舵机伺服控制器设计 [J], 宋晗;和阳;朱纪洪2.基于FPGA和DSP的高性能伺服控制器设计 [J], 蔡华祥;刘兴中;何苗;程静;唐杨3.基于 DSP 和 STM32的电液伺服控制器设计 [J], 王延年;熊伟;王桥4.基于DSP和ARM的光电跟踪系统伺服控制器设计及实现 [J], 陈益;邹卫军;赵高鹏5.基于TMS320F28335的光电跟踪伺服控制器的设计 [J], 李颢因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP的模糊控制伺服系统的设计【摘要】随着工业技术的不断发展和更多自动化产品的应用,人们对步进电动机的应用系统提出了更高的性能要求。
步进电动机的开环系统在工作状态时出现的失步和振荡等一系列问题日益突出。
为了获得更加平稳的运行过程,更高的定位精度,更宽的调速范围和便于使用等要求,人们展开了对步进电动机的闭环驱动控制系统研究,同时,这也促进了各种形式的自动化控制的步进电动机伺服系统的出现。
本文在根据伺服控制应用并分析控制伺服系统对DSP性能方面的基本要求,提出了主要针对DSP对步进电动机的模糊伺服控制系统的设计,有助于用户可以根据相应的控制要求来合理的选择DSP芯片,并以此来提高生产产品的性能和用户对产品的满意度。
【关键词】步进电动机模糊控制伺服系统DSP芯片一、混合式步进电动机和模糊控制简介目前对于混合式步进电动机中伺服控制系统的研究相对落后,因为步进电动机不同于一般的电动机,它的结构很特殊。
由于步进电动机的内部个控制变量间相互耦合且呈现出高度非线性状态,导致难以用简单的数学控制应用模型来表述。
如何才能获取能够反映混合式步进电动机内部工作机理的高精度数学模型以此来解决系统中出现的不确定信息,从而达到满意的控制效果,在研究的过程中,人们发现模糊控制是一种相对较好的选择。
模糊控制作为一种直接模拟人类思维结果的控制方式,已广泛应用于工业控制领域。
在模糊控制系统中,可以采用反激法来消除对磁阻式步进电动机的振荡。
由于模糊控制的模糊性,因此很难达到较高的稳态精度,需要对整个动态过程采用模糊控制,当系统误差出现到某一较小区间范围时采用PID控制,使其达到更高的性能。
图1展示了模糊控制器的结构框图。
图1 为模糊控制器结构图二、DSP芯片功能概况经过最近几年的高速发展,DSP芯片已逐渐取代了传统上的单片机成为伺服控制领域的主流控制芯片。
对控制领域起着重要作用的DSP芯片是传统的DSP 与单片机相结合的产物。
作为高性能控制器的DSP芯片,已广泛应用在伺服控制系统中。