最新基于51单片机控制红外通信.pdf
- 格式:pdf
- 大小:370.19 KB
- 文档页数:13


基于51单片机的红外遥控设计摘要很多电器都采用红外遥控,那么红外遥控的工作原理是什么呢?本文将介绍其原理和设计方法。
红外线遥控就是利用波长为0.76~1.5μm之间的近红外线来传送控制信号的。
常用的红外遥控系统一般分发射和接收两个部分。
红外遥控常用的载波频率为38kHz,这是由发射端所使用的455kHz晶振来决定的,在发射端要对晶振进行整数分频,分频系数一般取12,所以455kHz÷12≈37.9 kHz≈38kHz。
也有一些遥控系统采用36kHz、40kHz、56kHz等,一般由发射端晶振的振荡频率来决定。
接收端的输出状态大致可分为脉冲、电平、自锁、互锁、数据五种形式。
“脉冲”输出是当按发射端按键时,接收端对应输出端输出一个“有效脉冲”,宽度一般在100ms左右。
一般情况下,接收端除了几位数据输出外,还应有一位“数据有效”输出端,以便后级适时地来取数据。
这种输出形式一般用于与单片机或微机接口。
除以上输出形式外,还有“锁存”和“暂存”两种形式。
所谓“锁存”输出是指对发射端每次发的信号,接收端对应输出予以“储存”,直至收到新的信号为止;“暂存”输出与上述介绍的“电平”输出类似。
关键词:80c51单片机、红外发光二极管、晶振目录第一章1、引言 (3)2、设计要求与指标 (3)3、红外遥感发射系统设计 (4)4、红外发射电路设计 (4)5、调试结果及分析 (9)6、结论 (10)第二章1、引言 (10)2、设计要求与指标 (11)3、红外遥控系统设计 (11)4、系统功能实现方法 (15)5、红外接收电路 (16)6、软件设计 (17)7、调试结果及分析 (18)8、结论 (19)参考文献附录绪论人的眼睛能看到的可见光按波长从长到短排列,依次为红、橙、黄、绿、青、蓝、紫。
其中红光的波长范围为0.62~0.76μm;紫光的波长范围为0.38~0.46μm。
比紫光波长还短的光叫紫外线,比红光波长还长的光叫红外线。
目录一、系统设计任务与要求 (1)二、基础知识介绍 (2)2.1 热释电红外传感器简单介绍 (2)2.2 PIR的原理特性 (2)2.3 AT89C51单片机简单概述 (3)2.3.1 AT89C51单片机的结构 (3)2.3.2 AT89C51管脚说明 (4)3 方案设计 (6)3.1 总体设计思路 (6)3.2 具体电路模块设计 (7)3.2.1 热释电红外传感器原理 (7)3.2.2 放大电路的设计 (8)3.2.3 时钟电路的设计 (8)3.2.4 复位电路的设计 (9)3.2.5 发光二极管报警电路的设计 (9)3.2.6 声音报警电路的设计 (10)4 软件的程序流程图及程序 (11)5 总结 (15)参考文献 (15)附件总原理图 (16)红外报警系统的设计与制作内容摘要:本系统采用了热释电红外传感器,它的制作简单、成本低、安装比较方便,而且防盗性能比较稳定,抗干扰能力强、灵敏度高、安全可靠。
这种防盗器安装隐蔽,不易被盗贼发现,同时它的信号经过单片机系统处理后方便和PC机通信,便于多用户统一管理。
本设计包括硬件和软件设计两个部分。
硬件部分包括单片机控制电路、红外探头电路、驱动执行报警电路、LED控制电路等部分组成。
处理器采用51系列单片机AT89C51,整个系统是在系统软件控制下工作的。
关键词:单片机;红外传感器;数据采集;报警电路1系统设计任务与要求(1)、该设计包括硬件和软件设计两个部分。
模块划分为数据采集、键盘控制、报警等模块子函数。
(2)、本红外线防盗报警系统由热释电红外传感器、报警器、单片机控制电路、LED控制电路及相关的控制管理软件组成。
用户终端完成信息采集、处理、数据传送、功能设定、本地报警等功能。
终端由中央处理器、输入模块、输出模块、通信模块、功能设定模块等部分组成。
(3)、系统可实现功能。
当人员外出时,可把报警系统设置在外出布防状态,探测器工作起来,当有人闯入时,热释电红外传感器将探测到动作,设置在监测点上的红外探头将人体辐射的红外光谱变换成电信号,经放大电路、比较电路送至门限开关,打开门限阀门送出TTL 电平至AT89C51单片机,经单片机处理运算后驱动执行报警电路使警号发声。

目录第一章设计简介 (2)第二章系统方案 (2)一、设计方案对比 (2)二、方案设计 (4)第三章硬件设计 (4)一、红外遥控器 (4)二、红外接收模块部分 (6)第四章软件设计 (7)一、红外遥控器软件设计 (7)二、红外接收模块软件设计 (10)三、程序代码 (10)第五章测试及分析 (10)第六章结论 (10)第七章参考文献 (11)附录一(程序代码): (12)第一章设计简介本设计分为红外遥控器与红外接收模块两部分。
红外遥控器包括矩阵键盘、增强型51单片机(STC11L04E)、红外发射电路组成。
单片机扫描矩阵键盘后,将按键状态进行信源编码与信道编码,载波(38k脉冲)后由红外发射器发射。
红外接收模块部分由传统51单片机、数码管、一体化红外接收头组成。
一体化红外接收头将信号进行限幅放大、带通滤波、解调、积分、整形后输出解调信号至单片机,并由单片机输出解调信号。
第二章系统方案一、设计方案对比红外遥控器部分2.1.1 主控芯片方案一:HT6222方案二:STC11L04E分析:传统红外遥控器芯片HT6222具有性价比高、功能强大、稳定可靠、使用简单等特点,但该芯片难以零购。
STC11L04E为增强型51单片机,控制灵活(载波频率可调、通信协议可变更、用户码可变换)、价格较HT6222稍贵。
STC11L04E最大的特别是低功耗,功作电压低3.3V,易于应用于移动设备。
结论:由于STC11L04E单片机的灵活性以及学习性(可增强我们对一个完整通信系统的理解)。
因此我们采用方案二。
2.1.2 矩阵键盘方案一:3*6*2.5 贴片轻触开关方案二:6*6*6 直插轻触开关分析:3*6*2.5贴片轻触开关虽然体积小巧、美观,但与6*6*6直插轻触开关对比,在制板布线上较繁锁。
结论:综上,我们采用6*6*6直插轻触开关,使得整体布线简单,可布单面版,简化制板流程。
2.1.3电源模块方案一:钮扣电池CR2032方案二:可充电锂电池18650分析:可充电锂电池18650容量大,节能环保(可多次利用),但体积大。
单片机原理结课项目项目题目基于51单片机的红外线控制系统基于51单片机的红外线控制系统一、概述:红外遥控是一种无线、非接触控制技术,具有抗干扰能力强,信息传输可靠,功耗低,成本低,易实现等显著优点,被诸多电子设备特别是家用电器广泛采用,并越来越多的应用到计算机系统中。
由于红外线遥控不具有像无线电遥控那样穿过障碍物去控制被控对象的能力,所以在设计红外线遥控器时,不必要像无线电遥控器那样,每套( 发射器和接收器) 要有不同的遥控频率或编码( 否则,就会隔墙控制或干扰邻居的家用电器) ,所以同类产品的红外线遥控器,可以有相同的遥控频率或编码,而不会出现遥控信号“串门”的情况。
这对于大批量生产以及在家用电器上普及红外线遥控提供了极大的方面。
由于红外线为不可见光,因此对环境影响很小,再由红外光波动波长远小于无线电波的波长,所以红外线遥控不会影响其他家用电器,也不会影响临近的无线电设备。
基于51单片机的红外线控制系统。
要求通过单片机发送和接红外信号程序,根据接收的信号,执行有关动作的系统,能够实现近距离的无线通。
二、硬件设计1. 系统框图2. 电路原理图电路由五个模块构成(最小系统模块、红外接收模块、数码管显示模块、编程下载模块、电源模块)1) 最小系统STC12C5410AD 单片机红外接收头红外遥控器复位电路时钟振荡电路数码光显示最小系统由stc12c5410ad单片机,按键复位电路,时钟振荡电路构成。
a.电源电源采用5V直流电供电。
b.时钟、复位电路本电路选用12MHz晶振。
2)红外接收模块3)显示模块三、软件设计1.红外编解码原理红外线发射编码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制‘0’;以脉宽为0.565ms、间隔1.658ms、周期为2.25ms的组合表示二进制‘1’;红外接收头接收的信号和发射编码相反;一组编码由一个引导码,四个字节数据组成;引导码由9ms的高电位和4.5ms的地电位组成。
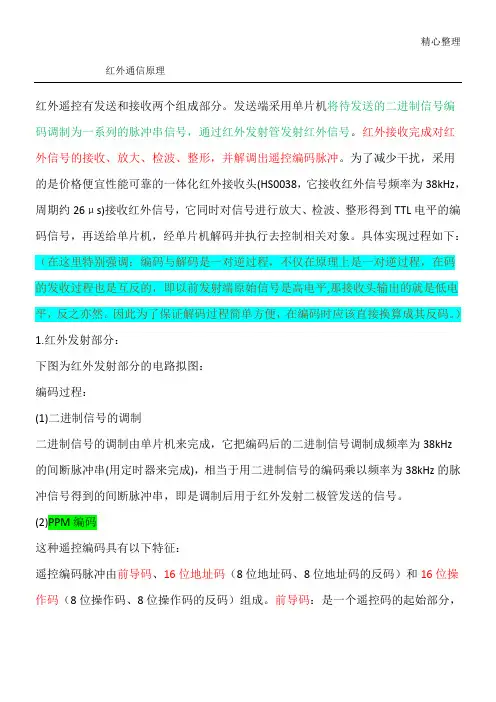
精心整理红外通信原理红外遥控有发送和接收两个组成部分。
发送端采用单片机将待发送的二进制信号编码调制为一系列的脉冲串信号,通过红外发射管发射红外信号。
红外接收完成对红外信号的接收、放大、检波、整形,并解调出遥控编码脉冲。
为了减少干扰,采用的是价格便宜性能可靠的一体化红外接收头(HS0038,它接收红外信号频率为38kHz,(2)PPM编码这种遥控编码具有以下特征:遥控编码脉冲由前导码、16位地址码(8位地址码、8位地址码的反码)和16位操作码(8位操作码、8位操作码的反码)组成。
前导码:是一个遥控码的起始部分,由一个9ms的高电平(起始码)和一个4.5ms的低电平(结果码)组成,作为接受数据的准备脉冲。
16位地址码:能区别不同的红外遥控设备,防止不同机种遥控码互相干扰。
16位操作码:用来执行不同的操作。
采用脉宽调制的串行码,以脉宽为0.56ms、间隔0.56ms、周期为1.12ms的组合表示二进制的“0”;以脉宽为1.68ms、间隔0.56ms、周期为2.24ms的组合表示二进制的“1”。
???{???}?}}一串完整的编码如下图所示前导码地址码地址反码操作码操作反码2.红外接收部分:红外接收完成对红外信号的接收、放大、检波、整形,并解调出遥控编码脉冲。
为形得到HS0038#defineuintunsignedintucharram[4]={0,0,0,0};//存放接受到的4个数据地址码16位+按键码8位+按键码取反的8位voiddelaytime(uinttime)//延迟90uS{uchara,b;for(a=time;a>0;a--){for(b=40;b>0;b--);}}voidrem()interrupt0//中断函数{ucharramc=0;//定义接收了4个字节的变量ucharcount=0;//定义现在接收第几位变量{电平return;//}32位中//第一位数据的0.56MS开始脉冲for(ramc=0;ramc<4;ramc++)//循环4次接收4个字节{for(count=0;count<8;count++)//循环8次接收8位(一个字节){while(prem!=1);//开始判断现在接收到的数据是0或者1,首先在这行本句话时,//保已经进入数据的0.56MS低电平阶段//等待本次接受数据的高电平的到来。
基于51单片机的红外通信设计报告研究方案:基于51单片机的红外通信设计报告摘要:本研究旨在通过对基于51单片机的红外通信的研究与实践,对红外通信协议进行优化和改进,提高通信的可靠性和稳定性。
通过设计红外发射器和接收器,并利用51单片机进行编程控制,实现了红外信号的发送与接收。
在实验中,采集了一系列数据,通过对这些数据的整理和分析,发现了现有研究成果的不足之处,并提出了一种新的观点和方法,为解决实际问题提供了有价值的参考。
1. 引言红外通信是一种常见的无线通信方式,具有传输速度快、安全可靠等优点,在家庭电器控制、遥控玩具、无线数据传输等领域广泛应用。
本研究基于51单片机进行红外通信协议的设计与实践,旨在优化和改进红外通信的性能。
2. 研究设计2.1 硬件设计2.1.1 红外发射器设计通过使用红外发光二极管作为发射器,并连接到51单片机的IO口,控制IO口的高低电平来实现对发射器的开关控制。
2.1.2 红外接收器设计通过使用红外接收头作为接收器,并将其连接到51单片机的IO口,通过检测接收器的信号电平变化来判断接收到的红外信号。
2.2 软件设计2.2.1 红外信号解析与发送在51单片机上编写红外信号解析与发送的程序,通过对输入信号的解析,将需要发送的红外信号编码成特定协议的数据帧,再通过IO口的控制将数据帧发送出去。
2.2.2 红外信号接收与解析在51单片机上编写红外信号接收与解析的程序,通过IO口的状态变化检测,获取红外接收器接收到的信号,并对接收到的信号进行解析,还原成原始数据。
3. 实验与调查情况在本研究中,我们通过实验和调查采集了一系列的数据来评估所设计的红外通信系统的性能。
3.1 实验设置我们设置了一个包含发射器和接收器的实验平台。
通过按下遥控器上的按键,触发发射器发送特定红外信号,在接收器上探测到红外信号,并通过51单片机进行信号解析。
3.2 数据采集与分析通过对实验中采集到的数据进行整理和分析,我们可以得到以下结论:(1)在传输距离较近的情况下,信号的可靠性和稳定性良好。
文章标题:基于51单片机的步进电机红外控制系统的设计引言在现代科技发展迅速的时代,控制系统已经被广泛应用于各个领域。
其中,基于51单片机的步进电机红外控制系统的设计,不仅在工业领域有着重要的作用,同时也在家电领域、智能家居等方面得到了广泛的应用。
本文将从步进电机控制系统的设计原理、红外控制的基本概念以及基于51单片机的系统设计方案等方面展开深入探讨。
一、步进电机控制系统的设计原理步进电机是一种将电脉冲信号转换为机械位移的执行元件,其控制系统设计原理是核心。
以步进电机为执行元件的控制系统通常包括电脉冲发生电路、电流驱动电路、位置控制逻辑电路以及接口电路等模块。
在系统设计中,需要考虑步进电机的类型、工作方式、转动角度以及控制精度等因素,以选择合适的控制方案和相关元器件。
针对步进电机的控制系统设计,首先需要从硬件电路和软件控制两个方面进行综合考虑。
硬件方面需要设计合适的脉冲发生电路和驱动电路,并根据具体场景考虑相关的接口电路,以实现步进电机的控制和驱动。
而软件控制方面,则需要编写相应的控制程序,使得系统能够根据具体的控制要求进行精准的控制和调节。
二、红外控制的基本概念红外控制是一种常见的无线遥控技术,通过使用红外线传输信号来实现对设备的控制。
通常包括红外发射器和红外接收器两个部分,发射器将控制信号转换成红外信号发送出去,接收器接收红外信号并将其转换成电信号进行处理。
在实际应用中,红外控制技术已经被广泛应用于各种家电遥控器、智能家居系统以及工业自动化领域。
红外控制的基本原理是在发射器和接收器之间通过红外线进行双向通信,通过调制解调的方式进行信号的传输和解析。
设计基于红外控制的步进电机系统需要考虑红外信号的发射和接收过程,以及相关的解析算法和信号处理。
信号的稳定性、抗干扰能力以及传输距离等也是需要考虑的重要因素。
三、基于51单片机的系统设计方案在步进电机红外控制系统的设计中,选择合适的控制芯片和处理器是至关重要的。
基于51单片机红外发射程序#include "reg52.h"sbit ir=P2^0;//红外发射管控制脚,使用24M晶振sbit led = P2^1;sbit ka=P1^0;sbit kb=P1^1;sbit kc=P1^2;sbit kd=P1^3;unsigned int count, set_count; //中断计数,设定中断次数bit irflag,keyflag; //红外发送标志位,按键标志位unsigned char irsys[]={0x00,0xff};//16位用户码unsigned char irdata,ircode; //发送的红外数据//---------------------------------------------------------------------------void delay(unsigned int a)//延时约1ms,晶振24M ,此处延时不需很精确{unsigned char i;while(--a!=0)for(i=300;i>0;i--); //若是12M晶振i=125}//---------------------------------------------------------------------------void keyscan() // 按键扫描{if(ka==0){ delay(5);while(!ka);keyflag=1;irdata=0x0a;} //a键按下,则发射数据0x0aif(kb==0){ delay(5);while(!kb);keyflag=1;irdata=0x0b;} //a键按下,则发射数据0x0aif(kc==0){ delay(5);while(!kc);keyflag=1;irdata=0x0c;} //a键按下,则发射数据0x0aif(kd==0){ delay(5);while(!kd);keyflag=1;irdata=0x0d;} //a键按下,则发射数据0x0a}//---------------------------------------------------------------------------void ir_sendbyte() //红外发送一个字节数据{unsigned char i;for(i=0;i<8;i++) //发送8位数据{set_count=43;//35; //发送编码中的0.56ms高电平(//后为12M 晶振下的数值)irflag=1; //启动红外发射二极管发射count=0; //中断计数先清0TR0=1; //开启定时器0while(count<="">TR0=0; //关闭定时器0if(ircode&0x01) set_count=130;//130; //判断红外编码最低位,若为1则1.69ms的低电平(//后为12M晶振下的数值)else set_count=43;//35; //为0则0.565ms的低电平(//后为12M 晶振下的数值) irflag=0; //低电平则不发射count=0; //中断计数清0TR0=1; //开启定时器0while(count<="">TR0=0; //关闭定时器0ircode=ircode>>1; //将数据右移,即从低位到高位发送}}//---------------------------------------------------------------------------void ir_send() //发送红外数据{set_count=692;//672; //发送编码中的引导码(9ms高电平+4.5ms低电平) (//后为12M晶振下的数值) tc9012irflag=1; //启动红外发射二极管发射count=0; //中断计数清0TR0=1;while(count<set_count);< p="">TR0=0;set_count=346;//336; //发送编码中的4.5ms低电平(//后为12M晶振下的数值)irflag=0; //低电平则不发射count=0;TR0=1;while(count<="">TR0=0;ircode=irsys[0]; //发送16位用户码的前1-8位ir_sendbyte();ircode=irsys[1]; //发送16位用户码的前9-16位ir_sendbyte();ircode=irdata; //发送8位数据码ir_sendbyte();ircode=~irdata; //发送8位数据反码ir_sendbyte();set_count=43;//35; //发送编码中的0.56ms高电平(//后为12M 晶振下的数值)irflag=1;count=0;TR0=1;while(count<set_count);< p="">TR0=0;ir=1;delay(23); //延时23ms(编码中的23ms低电平)set_count=692;//670; //发送编码中的引导码(9ms高电平+4.5ms低电平) (//后为12M晶振下的数值)irflag=1;count=0;TR0=1;while(count<set_count);< p="">TR0=0;set_count=346;//336; //发送编码中的4.5ms低电平(//后为12M晶振下的数值)irflag=0;count=0;TR0=1;while(count<set_count);< p="">TR0=0;set_count=43;//35; //发送编码中的0.56ms高电平(//后为12M 晶振下的数值) irflag=1;count=0;TR0=1;while(count<set_count);< p="">TR0=0;ir=1; //发射完了关闭红外发射二极管}//---------------------------------------------------------------------------void timer0_init() //定时器初始化{EA=1;TMOD=0x02; //定时0 8位自动重装模式ET0=1;TH0=0xe6;//0xf3; //定时13us,38K红外矩形波,晶振24M (//后为12M晶振下的数值) TL0=0xe6;}//---------------------------------------------------------------------------void main(){timer0_init(); //定时0初始化count=0; //中断计数先清0irflag=0; //红外发射标志先置0while(1){keyscan(); //键值扫描if(keyflag) //若有按键按下{led = 0;delay(10);ir_send(); //发送红外编码delay(500);keyflag=0; //按键标志清零delay(100);}else{led = 1;}}}//---------------------------------------------------------------------------void timer0() interrupt 1 //定时器0中断{count++;if(irflag==1) ir=~ir; //有发射标志,则发射38khz的矩形波else ir=1; //否则不发射,即相当于发射编码中的低电平}</set_count);<></set_count);<></set_count);<></set_count);<></set_count);<>。
基于51单片机的红外遥控器设计近年来,随着智能家居的兴起,红外遥控器在我们的生活中扮演着越来越重要的角色。
本文将基于51单片机,设计一个简单的红外遥控器。
首先,我们需要了解红外遥控器的工作原理。
红外遥控器使用红外线来传输指令。
当用户按下遥控器上的按键时,红外发射器发射一个特定的红外信号。
接收器接收到这个信号后,将其转换成电信号,并将其发送到电子设备中,实现对设备的控制。
接下来,我们需要选择合适的红外发射器和接收器。
常见的红外发射器有红外LED,常见的红外接收器有红外接收头。
在选择红外发射器和接收器时,要根据其工作频率、传输距离、灵敏度等因素进行选择。
在本设计中,我们选择了工作频率为38kHz的红外发射器和接收器。
接下来,我们需要设计电路,并进行程序开发。
首先,我们需要连接红外发射器和接收器到51单片机上。
红外发射器的一个引脚连接到51单片机的I/O口,另一个引脚连接到正极电源,第三个引脚连接到电源的接地端。
红外接收器的输出引脚连接到51单片机的I/O口,电源和接地端分别连接到正负电源。
接下来,我们需要编写程序。
首先,我们需要设置51单片机的I/O 口为输入或输出。
然后,我们需要编写程序来发送红外信号。
我们可以使用PWM技术来模拟红外信号的脉冲。
当用户按下遥控器上的按键时,我们可以发送一个特定的脉冲序列,来控制电子设备。
同时,我们还需要编写程序来接收红外信号。
当红外接收器接收到红外信号时,会输出一个特定的电平信号。
我们可以使用外部中断来检测这个信号,并进行相应的处理。
在程序开发过程中,我们需要注意红外信号的协议。
常见的红外信号协议有NEC、SONY等。
我们需要根据所使用的红外接收器的协议来编写相应的程序。
最后,我们需要测试代码的功能和稳定性。
可以通过连接电子设备,按下遥控器上的按键,来测试红外信号的发送和接收功能。
如果一切正常,我们的红外遥控器设计就完成了。
总结起来,基于51单片机的红外遥控器设计是一个简单而有趣的项目。
【摘要】本设计基于AT89C51单片机为控制核心,片外配合红外线遥控模块、水温加热模块开关、基于Dallas单线数字式的DS18B20温度传感器模块、蜂鸣器报警模块、按键模块、LCD1602液晶显示器模块、晶振电路模块、复位电路模块以及电源模块为一体构成无线水温控制系统。
本水温控制系统设计采用自上而下的模块化设计,具有形象直观、操作简单、结构紧凑、温度控制灵活等优点。
本系统能够对水温进行实时并且快速地温度采集、温度值显示、超温报警以及加热等功能,并且能够通过红外线遥控器实现对温度值的设定。
经过大量实验测试,本次设计的系统通用性强、功能齐全、简单实用,值得在工控领域被大量推广,它能够将实现水加热系统的自动化,对企业及社会的发展具有重要意义。
【关键词】:AT89C51,DS18B20温度传感器,LCD1602液晶显示器ABSTRACTThe design is based on AT89C51 single chip microcomputer as control core, chip with infrared remote control module, the temperature of the water heating module switch, based on Dallas digital DS18B20 temperature sensor module, buzzer alarm module, a key module, LCD1602 liquid crystal display module, crystal oscillator circuit module, reset circuit module and power module are integrated to form a wireless temperature control system. The water temperature control system design uses the modular design from top to bottom, has the advantages of visual image, simple operation, compact structure, flexible temperature control. The system can real-time temperature and rapid temperature acquisition, temperature display, temperature alarm, heating and other functions, and can realize the setting temperature value through the infrared remote controller. After a lot of experiments testing, the design of the system has strong universality, complete function, simple and practical, it is worth to be popularized in the field of industrial control, it will be able to realize automatic water heating system, has important significance to the development of enterprises and society.【KEY WORD】:AT89C51,DS18B20,LCD1602目录一、引言 (1)(一)选题背景 (1)(二)设计意义 (1)(三)设计任务 (2)二、总体方案设计 (3)(一)方案的选择 (3)(二)方案简述 (3)三、元器件介绍 (5)(一)AT89C51单片机 (5)(二)DS18B20温度传感器 (7)(三)红外遥控系统介绍 (8)四、系统硬件设计 (11)(一)原理图描述 (11)(二)DS18B20温度传感器模块 (12)(三)加热器开关模块 (12)(四)蜂鸣器报警模块 (12)(五)LCD1602液晶显示器模块 (13)(六)按键模块 (13)五、系统软件设计 (15)(一)主程序设计 (15)(二)子程序设计 (15)总结 (18)致谢 (19)参考文献 (20)附录一系统原理图 (21)附录二PCB (22)附录三元器件清单 (23)附录四系统程序 (24)一、引言(一)选题背景对于温度的控制在工业活动中非常普遍,温度参数是一个最常用的被控参数,在化工、食品、燃料以及钢铁产业中都涉及到温控过程。
基于51单片机的红外传感器原理下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!基于51单片机的红外传感器原理1. 简介红外传感器是一种常用于检测物体距离、障碍物识别等的传感器。
基于51单片机的红外遥控本讲内容:介绍红外遥控的知识,通过例程展示红外遥控程序的编写方法。
红外线简介:在光谱中波长自760nm至400um的电磁波称为红外线,它是一种不可见光。
目前几乎所有的视频和音频设备都可以通过红外遥控的方式进行遥控,比如电视机、空调、影碟机等,都可以见到红外遥控的影子。
这种技术应用广泛,相应的应用器件都十分廉价,因此红外遥控是我们日常设备控制的理想方式。
接收头输出的波形正好和遥控芯片输出的相反。
在这里红外通信采用NEC协议,它的特征如下:信号调制红外遥控信号接收管接口电路:红外信号发射电路 红外信号接收电路例程:红外遥控信号发射:/*****************红外通信——发射*******************单片机型号:STC89C52RC*开发环境:KEIL*名称:红外通信发射*功能:按下按键S4,S5,S6,S8,S9,S10,S11,S13,S14发射对应键值,可以与红外通信——接收程序配套使用***************************************************/#include <REG51.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned int#define SBM 0x80 //识别码#define m9 (65536-8294) //约9mS#define m4_5 (65536-4147) //约4.5mS#define m1_6 (65536-1521) //约1.65mS#define m_65 (65536-599) //约0.65mS#define m_56 (65536-516) //约0.56mS#define m40 (65536-36864) //约40mS#define m56 (65536-51610) //56mS#define m2_25 (65536-2074) //约2.25mSconst uchar TabHL1[9]={0x0c,0x18,0x5e,0x08,0x1c,0x5a,0x42,0x52,0x4a};sbit IR=P1^5; //定义发射引脚sbit BEEP=P2^3;void keyscan();void ZZ(uchar x);void Z0(uchar temp);void TT0(bit BT,uint x);void delay(int In,int Out);/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈函数功能:主函数┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈/ void main(void){TMOD=0x01; //T0 16位工作方式IR=1; //发射端口常态为高电平while(1){keyscan();}}/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈函数功能:发送主程序┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈/ void ZZ(uchar x){TT0(1,m9); //高电平9mSTT0(0,m4_5); //低电平4.5mS/*┈发送4帧数据┈*/Z0(SBM);Z0(~SBM);Z0(x);Z0(~x);/*┈┈结束码┈┈*/TT0(1,m_65);TT0(0,m40);}/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈函数功能:单帧发送程序入口参数:1帧数据┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈/ void Z0(uchar temp){uchar v;for (v=0;v<8;v++) //循环8次移位{TT0(1,m_65); //高电平0.65mSif(temp&0x01) TT0(0,m1_6); //发送最低位else TT0(0,m_56);temp >>= 1; //右移一位}}/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈函数功能:38KHz脉冲发射 + 延时程序入口参数:(是否发射脉冲,延时约 x (uS))┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈/void TT0(bit BT,uint x){TH0=x>>8; //输入T0初始值TL0=x;TF0=0; //清0TR0=1; //启动定时器0if(BT==0)while(!TF0);//BT=0时不发射38KHz脉冲只延时;BT=1发射38KHz脉冲且延时;else while(1) //38KHz脉冲,占空比5:26{IR = 0;if(TF0)break;if(TF0)break;IR=1;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;}TR0=0; //关闭定时器0TF0=0; //标志位溢出则清0IR =1; //脉冲停止后,发射端口常态为高电平}void keyscan() //按键扫描函数{uchar buffer;/***************************************************/P3=0xfe; //扫描S3,S4,S5,S6;buffer=P3;buffer=buffer & 0xf0;if(buffer!=0xf0){delay(5,10);if(buffer!=0xf0){buffer=P3;switch(buffer){case 0xee:{;}break;case 0xde:{ZZ(TabHL1[0]);}break;case 0xbe:{ZZ(TabHL1[1]);}break;case 0x7e:{ZZ(TabHL1[2]);}break;}while(buffer != 0xf0){buffer=P3;buffer=buffer&0xf0;BEEP=0;}BEEP=1;}}/****************************************************/ P3=0xfd; //扫描S8,S9,S10,S11buffer=P3;buffer=buffer & 0xf0;if(buffer!=0xf0){delay(5,10);if(buffer!=0xf0){buffer=P3;switch(buffer){case 0xed:{ZZ(TabHL1[3]);}break;case 0xdd:{ZZ(TabHL1[4]);}break;case 0xbd:{ZZ(TabHL1[5]);}break;case 0x7d:{ZZ(TabHL1[6]);}break;}while(buffer!=0xf0){buffer=P3;buffer=buffer&0xf0;BEEP=0;}BEEP=1;}}/****************************************************/ P3=0xfb; //扫描S13,S14,S15,S16buffer=P3;buffer=buffer&0xf0;if(buffer!=0xf0){delay(5,10);if(buffer!=0xf0){buffer=P3;switch(buffer){case 0xeb:{ZZ(TabHL1[7]);}break;case 0xdb:{ZZ(TabHL1[8]);}break;}while(buffer!=0xf0){buffer=P3;buffer=buffer&0xf0;BEEP=0;}BEEP=1;}}}void delay(int In,int Out) //定义延时函数{int i,j;for(i=0;i<In;i++){for(j=0;j<Out;j++){;}}}红外遥控信号接收:/*****************红外通信--接收*******************单片机型号:STC89C52RC*开发环境:KEIL*功能:在液晶LCD1602上显示接收到的数值*************************************************/#include<reg52.h>#define LCD_Data P0#define Busy 0x80sbit IR=P3^2;sbit LCD_RS=P1^0;sbit LCD_RW=P1^1;sbit LCD_E=P2^5;void TIM0init(void);void EX0init(void);void SYSinit(void);void delay(int In,int Out);void Delay5Ms(void);void Ir_work(void);void Ircordpro(void);void WriteDataLCD(unsigned char WDLCD);void WriteCommandLCD(unsigned char WCLCD,BuysC);unsigned char ReadDataLCD(void);unsigned char ReadStatusLCD(void);void LCDInit(void);void DisplayOneChar(unsigned char X,unsigned char Y,unsigned char DData);void DisplayListChar(unsigned char X,unsigned char Y,unsigned char code *DData); void Info_display(void);bit IRpro_ok;bit IR_ok;unsigned char IRcord[4];unsigned char IRdata[33];unsigned char codedofly_DuanMa[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};unsigned char irtime;unsigned char speed_num=0;unsigned char codemb_table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};unsigned char code welcome[]={"YOU ARE WELCOME"};unsigned char code ir_reve[]={"IR_RECEIVE: "};/*******************5ms延时函数*********************/void Delay5Ms(void){unsigned int TempCyc=3552;while(TempCyc--);}void delay(int In,int Out){int i,j;for(i=0;i<In;i++){for(j=0;j<Out;j++){;}}}/***********************写数据函数***********************/ void WriteDataLCD(unsigned char WDLCD){ReadStatusLCD();LCD_Data=WDLCD;LCD_RS=1;LCD_RW=0;LCD_E=0;LCD_E=0;LCD_E=1;}/**********************写指令函数************************/ void WriteCommandLCD(unsigned char WCLCD,BuysC){if(BuysC)ReadStatusLCD();LCD_Data=WCLCD;LCD_RS=0;LCD_RW=0;LCD_E=0;LCD_E=0;LCD_E=1;}/***********************读状态函数************************/ unsigned char ReadStatusLCD(void){LCD_Data=0xFF;LCD_RS=0;LCD_RW=1;LCD_E=0;LCD_E=0;LCD_E=1;while(LCD_Data & Busy);return(LCD_Data);}/************************LCD初始化************************/ void LCDInit(void){LCD_Data=0;WriteCommandLCD(0x38,0);Delay5Ms();WriteCommandLCD(0x38,0);Delay5Ms();WriteCommandLCD(0x38,0);Delay5Ms();WriteCommandLCD(0x38,1);WriteCommandLCD(0x08,1);WriteCommandLCD(0x01,1);WriteCommandLCD(0x06,1);WriteCommandLCD(0x0C,1);}/*******************按指定位置显示一个字符******************/void DisplayOneChar(unsigned char X,unsigned char Y,unsigned char DData){Y&=0x1;X&=0xF;if(Y)X|=0x40;X|=0x80;WriteCommandLCD(X,0);WriteDataLCD(DData);}/*******************按指定位置显示一串字符******************/void DisplayListChar(unsigned char X,unsigned char Y,unsigned char code *DData) {unsigned char ListLength;ListLength=0;Y&=0x1;X&=0xF;while(DData[ListLength]>=0x20){if(X<=0xF){DisplayOneChar(X,Y,DData[ListLength]);ListLength++;X++;}}}/***********************定时器0初始化***********************/void TIM0init(void){TMOD=0x02;TH0=0x00;TL0=0x00;ET0=1;TR0=1;}/**********************外部中断0初始化**********************/void EX0init(void){IT0=1;EX0=1;EA=1;}/*************************系统初始化*************************/void SYSinit(void){TIM0init();EX0init();LCDInit();}/********************红外信号接收相关函数********************/void Ir_work(void){switch(IRcord[2]){case 0x0C:{DisplayOneChar(12,1,0x31);}break;case 0x18:{DisplayOneChar(12,1,0x32);}break;case 0x5e:{DisplayOneChar(12,1,0x33);}break;case 0x08:{DisplayOneChar(12,1,0x34);}break;case 0x1c:{DisplayOneChar(12,1,0x35);}break;case 0x5a:{DisplayOneChar(12,1,0x36);}break;case 0x42:{DisplayOneChar(12,1,0x37);}break;case 0x52:{DisplayOneChar(12,1,0x38);}break;case 0x4a:{DisplayOneChar(12,1,0x39);}break;default:break;}}void Ircordpro(void){unsigned char i,j,k;unsigned char cord,value;k=1;for(i=0;i<4;i++){for(j=1;j<=8;j++){cord=IRdata[k];if(cord>7)value|=0x80;if(j<8){value>>=1;}k++;}IRcord[i]=value;value=0;}IRpro_ok=1;}/********************红外信号接收相关函数********************/ void main(void){SYSinit();delay(5,100);DisplayListChar(0,0,welcome);DisplayListChar(0,1,ir_reve);while(1){if(IR_ok){Ircordpro();IR_ok=0;}if(IRpro_ok){Ir_work();}}}/********************定时器0中断处理函数********************/ void tim0_isr (void) interrupt 1 using 1{irtime++;}/*******************外部中断0中断处理函数*******************/ void EX0_ISR (void) interrupt 0{static unsigned char i;static bit startflag;if(startflag){if(irtime<63&&irtime>=33)i=0;IRdata[i]=irtime;irtime=0;i++;if(i==33){IR_ok=1;i=0;}}else{irtime=0;startflag=1;}}。