KOYO 旋转光电编码器说明书
- 格式:pdf
- 大小:515.79 KB
- 文档页数:31
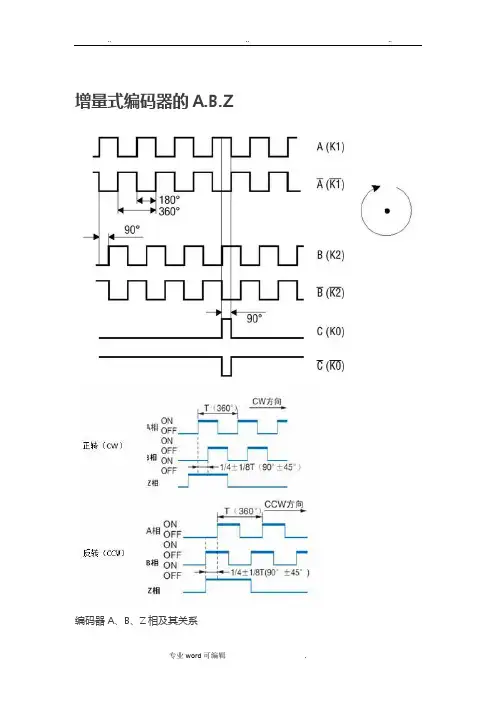
增量式编码器的A.B.Z 编码器A、B、Z相及其关系TTL编码器A相,B相信号,Z相信号,U相信号,V相信号,W相信号,分别有什么关系?对于这个问题的回答我们从以下几个方面说明:编码器只有A相、B相、Z相信号的概念。
所谓U相、V相、W相是指的电机的主电源的三相交流供电,与编码器没有任何关系。
“A相、B相、Z相”与“U相、V相、W相”是完全没有什么关系的两种概念,前者是编码器的通道输出信号;后者是交流电机的三相主回路供电。
而编码器的A相、B相、Z相信号中,A、B两个通道的信号一般是正交(即互差90°)脉冲信号;而Z相是零脉冲信号。
详细来说,就是——一般编码器输出信号除A、B两相(A、B两通道的信号序列相位差为90度)外,每转一圈还输出一个零位脉冲Z。
当主轴以顺时针方向旋转时,输出脉冲A通道信号位于B通道之前;当主轴逆时针旋转时,A通道信号则位于B通道之后。
从而由此判断主轴是正转还是反转。
另外,编码器每旋转一周发一个脉冲,称之为零位脉冲或标识脉冲(即Z相信号),零位脉冲用于决定零位置或标识位置。
要准确测量零位脉冲,不论旋转方向,零位脉冲均被作为两个通道的高位组合输出。
由于通道之间的相位差的存在,零位脉冲仅为脉冲长度的一半。
带U、V、W相的编码器,应该是伺服电机编码器A、B相是两列脉冲,或正弦波、或方波,两者的相位相差90度,因此既可以测量转速,还可以测量电机的旋转方向Z相是参考脉冲,每转一圈输出一个脉冲,脉冲宽度往往只占1/4周期,其作用是编码器自我校正用的,使得编码器在断电或丢失脉冲的时候也能正常使用。
ABZ是编码器的位置信号,UVW是电机的磁极信号,一般用于同步电机; AB对于TTL/HTL编码器来说,AB相根据编码器的细分度不同,每圈有很多个,但Z相每圈只有一个;UVW磁极信号之间相位差是120度,随着编码器的角度转动而转动,与ABZ 之间可以说没有直接关系。
/######################################################## #####编码器A+A-B+B-Z+Z-怎么用分别代表什么意思?这种编码器的输出方式为长线驱动(line driver),其中A+A-B+B-Z+Z-为输出的信号线,增量编码器给出两相方波,它们的相位差90°(电气上),通常称为A通道和B通道。
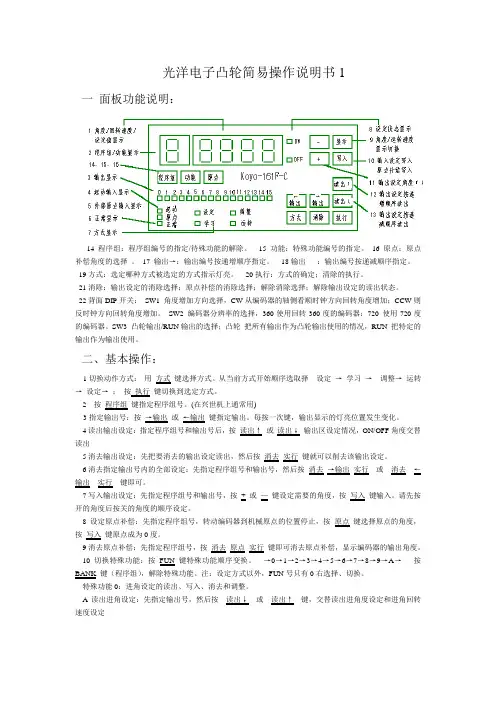
光洋电子凸轮简易操作说明书1一面板功能说明:14 程序组:程序组编号的指定/待殊功能的解除。
15 功能:特殊功能编号的指定。
16 原点:原点补偿角度的选择。
17 输出→:输出编号按递增顺序指定。
18输出:输出编号按递减顺序指定。
19方式:选定哪种方式被选定的方式指示灯亮。
20执行:方式的确定;清除的执行。
21消除:输出设定的消除选择;原点补偿的消除选择;解除消除选择;解除输出设定的读出状态。
22背面DIP开关:SW1 角度增加方向选择,CW从编码器的轴侧看顺时钟方向回转角度增加;CCW则反时钟方向回转角度增加。
SW2 编码器分辨率的选择,360使用回转360度的编码器;720 使用720度的编码器。
SW3 凸轮输出/RUN输出的选择;凸轮把所有输出作为凸轮输出使用的情况,RUN 把特定的输出作为输出使用。
二、基本操作:1切换动作方式:用方式键选择方式。
从当前方式开始顺序选取择设定→学习→调整→运转→设定→;按执行键切换到选定方式。
2 按程序组键指定程序组号。
(在兴世机上通常用)3指定输出号:按→输出或←输出键指定输出。
每按一次键,输出显示的灯亮位置发生变化。
4读出输出设定:指定程序组号和输出号后,按读出↑或读出↓输出区设定情况,ON/OFF角度交替读出5消去输出设定:先把要消去的输出设定读出,然后按消去实行键就可以削去该输出设定。
6消去指定输出号内的全部设定:先指定程序组号和输出号,然后按消去→输出实行或消去←输出实行键即可。
7写入输出设定:先指定程序组号和输出号,按+ 或—键设定需要的角度,按写入键输入。
请先按开的角度后按关的角度的顺序设定。
8设定原点补偿:先指定程序组号,转动编码器到机械原点的位置停止,按原点键选择原点的角度,按写入键原点成为0度。
9消去原点补偿:先指定程序组号,按消去原点实行键即可消去原点补偿,显示编码器的输出角度。
10切换特殊功能:按FUN 键特殊功能顺序变换。
→0→1→2→3→4→5→6→7→8→9→A→按BANK 键(程序组),解除特殊功能。

旋转编码开关(Rotary Encoder switch)-使用说明及程序具有左转,右转,按下三个功能.4.5 脚是中间按下去地开关接线 1 23 脚一般是中间2脚接地,1.3 脚上拉电阻后,当左转.右转旋纽时,在1.3 脚就有脉冲信号输出了.着这是标准资料:在单片机编程时,左转和右转地判别是难点,用示波器观察这种开关左转和右转时两个输出脚地信号有个相位差,见下图:由此可见,如果输出1 为高电平时,输出2 出现一个高电平,这时开关就是向顺时针旋转; 当输出1 为高电平,输出2 出现一个低电平,这时就一定是逆时针方向旋转.所以,在单片机编程时只需要判断当输出1 为高电平时,输出2 当时地状态就可以判断出是左旋转或是右旋转了.还有另外一种3 脚地,除了不带按钮开关外,和上面是一样地使用.参考:#include "reg51.h"#define uint unsigned intsbit CodingsWitch_A=P1_1;sbit CodingsWitch_B=P1_2;uint CodingsWitchPolling()//{static Uchar Aold,Bold; //定义了两个变量用来储蓄上一次调用此方法是编码开关两引脚地电平static Uchar st; //定义了一个变量用来储蓄以前是否出现了两个引脚都为高电平地状态uint tmp = 0;if(CodingsWitch_A&&CodingsWitch_B)st = 1; //if(st) //如果st 为1 执行下面地步骤{if(CodingsWitch_A==0&&CodingsWitch_B==0) //如果当前编码开关地两个引脚都为底电平执行下面地步骤{if(Bold) //为高说明编码开关在向加大地方向转{st = 0;tmp++; //}if(Aold) //为高说明编码开关在向减小地方向转{st = 0;tmp--; //设返回值}}}Aold = CodingsWitch_A; //Bold = CodingsWitch_B; //储return tmp; //}//编码器计数程序void encoder_cnt(void){uchar temp;temp = PIND; //取端口D 管脚信号couch_clr = (temp & 0x08); //取编码器清零信号if(couch_clr != false) //有编码器清零信号{couch_num = 0; //水平床码清零}else{if(encoder_cnt_en == false) //编码器计数模块没有启动{pr_couch_ba = temp & 0x03; //取编码器A.B 相电平信号}else{couch_ba = temp & 0x03; //取编码器A.B 相电平信号if(pr_couch_ba == 0x00){if(couch_ba == 0x01){couch_num++; //水平床码加1}else if(couch_ba == 0x10){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x01){if(couch_ba == 0x11){couch_num++; //水平床码加1}{couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x10){if(couch_ba == 0x00){couch_num++; //水平床码加1}else if(couch_ba == 0x11){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x11){if(couch_ba == 0x10){couch_num++; //水平床码加1}{couch_num--; //水平床码减1}}}pr_couch_ba = couch_ba;}}编码器及其计数模块原理飘扬地旋转编码器地检测程序(MCS51)//旋转编码器检测程序,A/B信号分别接在了INT0和INT1上//程序作者:BG4UVR//2005 年1 月15 用KEIL编译.硬件测试通过//注意:编码器地信号,程序未做消抖处理.测试中,A/B信号上各//接了一只104地瓷片电容,工作很正常.如果不接电容,请自行编//写信号消抖程序.#include <at89x51.h>sbit led="0xB1";//有一只LED接在了RXD 引脚上,用来指示正反转;main(){EA=1; //总中断允许EX0=1; //外部中断0允许IT0=1; //外部中断0为边沿触发方式while(1);;}/*********************编码器中断函数入口:无出口:无*********************/void encoder(void) interrupt 0 { //外部中断0if (INT1){led=1;}else{led=0;}}whimsy 地AVR 程序//外部中断0,用于编码开关解码,解码图: A 接中断脚(AVR 地PD2),以此为基准,B 用来判断方向(连到AVR 地PA1), C 接地//A -|// | -----|__________|----------|____________//C -|////B -|// | ----------|__________|----------|____________//C -|// CW ===>>> ROTATION//外部中断设置(ISC01=0,ISC00=1): INT0 引脚上任意地逻辑电平变化都将引发中断#pragma interrupt_handler int0_isr:2void int0_isr(void){//external interupt on INT0GICR=0; //禁止外部中断if ((PIND & 0x04)==0) //先判断是高电平产生地中断还是低点平地中断if ((PINA & 0x02)==0) //再判断B 线上地电平{keycounter--;keydirection="0";}个人收集整理资料,仅供交流学习,勿作商业用途else{keycounter++;keydirection="1";}elseif ((PINA & 0x02)==0){keycounter++;keydirection="1";}else{keycounter--;keydirection=0;}GICR=0x40;}。
我上次做过一个。
好像用计数器转到寄存器里后,正转是正数的,寄存器里可以计数值的。
但
是反转好像是负值,寄存器里不能计数值。
回复引用举报
wyb2866255
个人主页 给TA 发消息 加TA 为好友 发表于:2011-06-17 22:26:26 14
楼
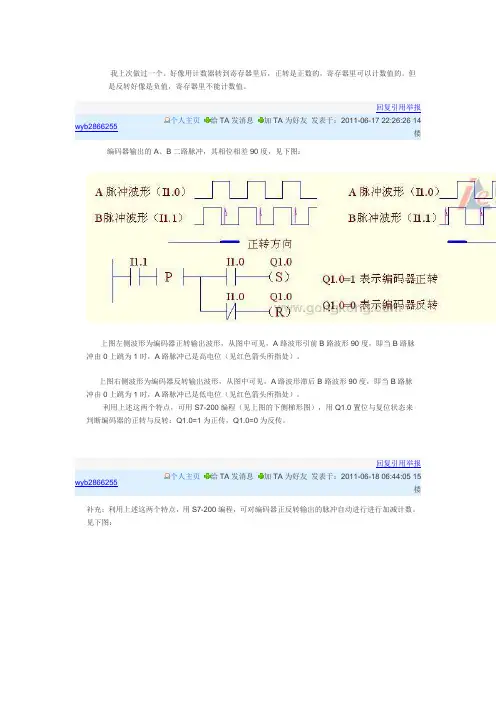
编码器输出的A 、B 二路脉冲,其相位相差90度,见下图:
上图左侧波形为编码器正转输出波形,从图中可见,A 路波形引前B 路波形90度,即当B 路脉冲由0上跳为1时,A 路脉冲已是高电位(见红色箭头所指处)。
上图右侧波形为编码器反转输出波形,从图中可见,A 路波形滞后B 路波形90度,即当B 路脉冲由0上跳为1时,A 路脉冲已是低电位(见红色箭头所指处)。
利用上述这两个特点,可用S7-200编程(见上图的下侧梯形图),用Q1.0置位与复位状态来判断编码器的正转与反转:Q1.0=1为正传,Q1.0=0为反传。
回复引用举报 wyb2866255 个人主页 给TA 发消息 加TA 为好友 发表于:2011-06-18 06:44:05 15
楼
补充:利用上述这两个特点,用S7-200编程,可对编码器正反转输出的脉冲自动进行进行加减计数。
见下图:
回复引用举报
该放手时就放手个人主页给TA发消息加TA为好友发表于:2011-06-18 09:55:09 16
楼
PLC中有高速计数器,可以设置成各种模式,其中包括AB正交脉冲,可以根据计数器的数字是增加后者减少来判断方向,有的PLC有判断速度的指令,也可以判断正反转!。
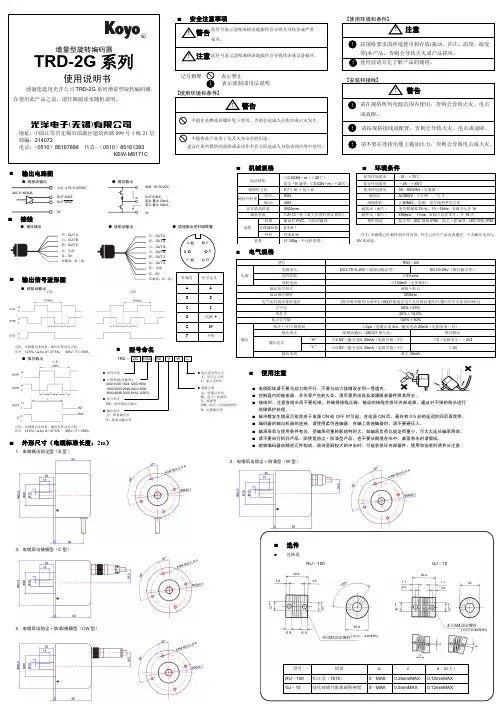
编码器使用说明光电编码器基础1.1 概述光电编码器是一种集光、机、电为一体的数字化检测装置,它具有分辨率高、精度高、结构简单、体积小、使用可靠、易于维护、性价比高等优点。
近10几年来,发展为一种成熟的多规格、高性能的系列工业化产品,在数控机床、机器人、雷达、光电经纬仪、地面指挥仪、高精度闭环调速系统、伺服系统等诸多领域中得到了广泛的应用。
光电编码器可以定义为:一种通过光电转换,将输至轴上的机械、几何位移量转换成脉冲或数字量的传感器,它主要用于速度或位置(角度)的检测。
典型的光电编码器由码盘(Disk)、检测光栅(Mask)、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成。
一般来说,根据光电编码器产生脉冲的方式不同,可以分为增量式、绝对式以及复合式三大类。
按编码器运动部件的运动方式来分,可以分为旋转式和直线式两种。
由于直线式运动可以借助机械连接转变为旋转式运动,反之亦然。
因此,只有在那些结构形式和运动方式都有利于使用直线式光电编码器的场合才予使用。
旋转式光电编码器容易做成全封闭型式,易于实现小型化,传感长度较长,具有较长的环境适用能力,因而在实际工业生产中得到广泛的应用,在本书中主要针对旋转式光电编码器,如不特别说明,所提到的光电编码器则指旋转式光电编码器。
1.2 增量式光电编码器1.2.1 原理及其结构增量式光电编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,但是不能通过输出脉冲区别出在哪个位置上的增量。
它能够产生与位移增量等值的脉冲信号,其作用是提供一种对连续位移量离散化或增量化以及位移变化(速度)的传感方法,它是相对于某个基准点的相对位置增量,不能够直接检测出轴的绝对位置信息。
一般来说,增量式光电编码器输出A、B两相互差电度角的脉冲信号(即所谓的两组正交输出信号),从而可方便地判断出旋转方向。
同时还有用作参考零位的Z相标志(指示)脉冲信号,码盘每旋转一周,只发出一个标志信号。
编码器:
应用
旋转编码器是用来测量数据的,当编码器旋转式通过电子拦截获得数据,然后管理员传到下一运输注意
不要丢下旋转编码器和避免摇晃。
编码器包括光学系统并运用光学原理。
用原始包装,运用不正当的包装,可能导致编码器毁坏。
存储
存储温度:-30到80保持干燥
安装说明
安装编码器时,避免安装轴时发生摇晃,固定的光学圆盘碰到轴时可能毁坏
不要打开旋转编码器
据菲权威统计,打开或关闭编码器可能导致短路,缸的导线可能剪断,进入的灰尘可能毁坏光不要做任何机械上的更改在编码器上,安全的功能与机械部分更改将不担保
电子试运行
试运行和操作需要专业的人员,
不要做点路上的更改在编码器上,
穿接插头需要必须实实在在的连接。
错误的连接可能导致故障,
管理员传到下一步
进入的灰尘可能毁坏光学系统。
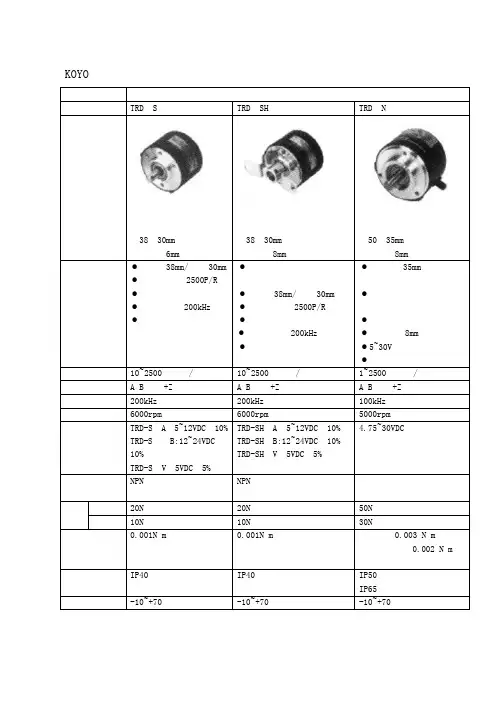
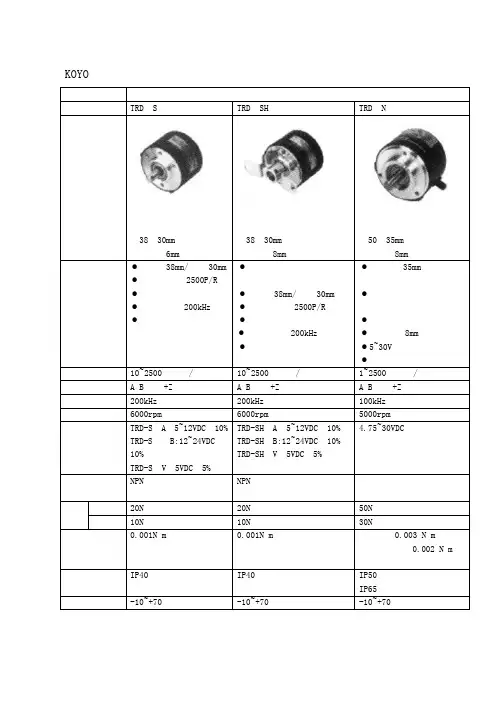
KOYO旋转编码器一览表(下表列出各系列的基本型,其它规格机种在各章节中详述)类型增量型系列名 TRD-S系列 TRD-SH系列 TRD-N系列外观(基本型)Φ38×30mm轴径:Φ6mmΦ38×30mm轴径:Φ8mmΦ50×35mm轴径:Φ8mm 特点外径Φ38mm/长度30mm分解能最高2500P/R体积小、价格低高速应答(200kHz)分辩率范围宽中空型可直接与传动轴连接外径Φ38mm/厚度30mm分解能最高2500P/R体积小、价格低高速应答(200kHz)分辩率范围宽厚度为35mm的薄形设计。
适合各种环境的保护构造。
分辨范围宽。
坚固的Φ8mm主轴。
5~30V宽电压范围推拉输出易于延长电缆分辩率 10~2500(脉冲/转) 10~2500(脉冲/转)1~2500(脉冲/转)输出信号形式A·B二相+Z相A·B二相+Z相A·B二相+Z相最高响应频率 200kHz 200kHz 100kHz允许最高转速 6000rpm 6000rpm 5000rpm电源电压 TRD-S□A:5~12VDC±10%TRD-S□B:12~24VDC±10%TRD-S□V:5VDC±5%TRD-SH□A:5~12VDC±10%TRD-SH□B:12~24VDC±10%TRD-SH□V:5VDC±5%4.75~30VDC输出形式 NPN开路集电极输出线驱动输出NPN开路集电极输出线驱动输出推拉输出带部分负载短路保护回路径向 20N 20N 50N荷重轴向 10N 10N 30N起动转矩 0.001N·m以下 0.001N·m以下防尘型:0.003 N·m以下防尘防滴型:0.002 N·m以下保护构造 IP40:仅防尘型 IP40:仅防尘型 IP50:防尘型IP65:防尘防滴型使用环境温度 -10~+70℃ -10~+70℃ -10~+70℃类型增量型系列名 TRD-NH系列 TRD-J系列 TRD-GK系列外观(基本型)Φ50×35mm轴径:Φ8mmΦ50×50mm轴径:Φ8mmΦ78×60mm轴径:Φ10mm 特点中空型可直接与传动轴连接厚度35mm薄形设计提供防油型,适用于较差的环境中分辩率范围宽轴径8mm坚固耐用5~30V宽电压范围推拉输出易于延长电缆外径Φ50mm小体积轴径Φ8mm。
耐冲击振动的金属光栅。
5~30V宽电压范围推拉输出易于延长电缆轴荷重力强,寿命长。
高速应答(100kHz)。
分辨范围宽。
使用温度范围-10~+70℃防尘防滴型推拉输出易于延长电缆分辩率1~2500(脉冲/转) 10~1000(脉冲/转) 10~5000(脉冲/转)(BZ型为100~5000脉冲/转)输出信号形式A·B二相+Z相A·B二相+Z相A·B二相+Z相(BZ型正转/反转+Z相)最高响应频率100kHz 50kHz 100kHz允许最高转速5000rpm 5000rpm 5000rpm电源电压 4.75~30VDC TRD-J□:4.75~30VDCTRD-J□V:5VDC±5%10~30VDC输出形式推拉输出带部分负载短路保护回路线驱动输出推拉输出带部分负载短路保护回路推拉输出带部分负载短路保护回路径向 50N 50N 100N荷重轴向 30N 30N 50N起动转矩防尘型:0.003N·m以下防尘防滴型:0.05N·m以下0.001N·m以下防尘型:0.003N·m以下防尘防滴型:0.05N·m以下0.1N·m以下保护构造 IP50:防尘型IP65:防尘防滴型IP50:防尘型IP65:防尘防滴型IP65:防尘防滴型使用环境温度 -10~+70℃ -10~+50℃ -10~+70℃类型绝对值型系列名 TRD-NA系列 TRD-K系列 TRD-KL系列外观(基本型)Φ50×35mm轴径:Φ8mmΦ78×66mm轴径:Φ10mm Φ78×66mm轴径:Φ10mm 特点检出绝对位置防尘防滴。
厚度为35mm的薄形设计。
坚固的铝铸件外壳。
无读取误差的格雷码输出。
抗冲击振动的金属光栅。
检出绝对位置。
分辩率最大10bit(1024)。
轴荷重力强、寿命长。
防尘防滴。
无读取误差的格雷码输出。
抗冲击振动的金属光栅。
电缆与插座横出,节省空间。
检出绝对位置。
分辩率最大10bit(1024)。
坚固的铝铸件外壳。
彻底防尘防滴。
抗冲击振动的金属光栅。
分辩率 32~1024(等分/转) 180~1024(等分/转) 180~1024(等分/转)(BZ型为100~5000脉冲/转)输出信号形式格雷码(最大10bit)格雷码(最大10bit)格雷码(最大10bit)最高响应频率20kHz 20kHz 20kHz允许最高转速3000rpm 5000rpm 5000rpm 电源电压 10.8~26.4VDC 10.8~26.4VDC 10~30VDC输出形式 NPN及PNP开路集电极输出 NPN开路集电极输出 NPN开路集电极输出径向 50N 100N 70N荷重轴向 30N 50N 40N起动转矩 0.03N·m以下 0.1N·m以下 0.1N·m以下保护构造 IP65:防尘防滴型 IP65:防尘防滴型 IP65:防尘防滴型使用环境温度-10~+60℃ -10~+50℃ -10~+60℃TRD-S/SH 系列增量型旋转编码器特点:体积小,外径Φ38mm/长度30mm 尽管结构紧凑,但最高2500P/R 价格低型号一览 种类外观型号电源电压 输出 输出类型 脉冲数/转 TRD-S □A 4.5~13.2VDC TRD-S □B 10.8~26.4VDC二相带原点输出(原点逆动作)开路集电极输出主轴TRD-S □V 4.75~5.25VDC 二相带原点输出(原点正动作)线驱动输出 TRD-SH □A 4.5~13.2VDC TRD-SH □B 10.8~26.4VDC二相带原点输出(原点逆动作)开路集电极输出中空轴TRD-SH □V 4.75~5.25VDC二相带原点输出(原点正动作)线驱动输出 *10,20,30,40,50,60,100,200,250,300,360,400,500,600,800,1000,1024,1200,2000,2500*10~60:仅开路集电极输出型号构成脉冲数和频率脉冲数/转10 20 3040 50 60 100200250300360400500512600800 1000 1024 1200 20002500最大响应频率(kHz)*1 2 3 4 5 6 10202530364050506080100 100 120 200200TRD-S □A/ TRD-SH □A zzzzzzzzzzzzzzzzzzzzzTRD-S □B/ TRD-SH □B zzzzzzzzzzzzzzzzzzzzz适用机种TRD-S □V/ TRD-SH □Vzzzzzzzzzzzzzzz*电气的最高响应频率由分辩率和最高旋转速度确定。
电气的最高旋转速度={(最高响应频率/脉冲数)×60}。
当旋转速度超过上限值时,电气信号将丢失。
电气规格型号 TRD-S□A/TRD-SH□A TRD-S□B/TRD-SH□B TRD-S□V/TRD-SH□V电源电源电压 4.5~13.2VDC 10.8~26.4VDC 4.75~5.25VDC允许波纹 3%rms以下 - 消耗电流 50mA以下 50mA以下信号形式二相带原点输出二相带原点输出最高响应频率 200kHz 200kHz占空比 50±25% 50±25%脉冲差宽度 25±12.5% 25±12.5%原点信号宽度 100±50% 100±50%输出上升/下降沿时间1μs以下(电缆长度为1m时) -输出形式 NPN开路集电极输出线驱动*输出逻辑负逻辑(正逻辑(“H” - 2.5V以上输出电压“L” 0.4V以下 0.4V以下流入电流 30mA以下 - 负载电源电压 30VDC以下 - *与26C31相同,lever与26C32相同。
机械规格起动转矩 0.001N.m(+20℃)以下。
轴惯性力矩 0.3×10-6kg.m2轴允许荷重径向:20N轴向:10N允许最高旋转数(Note1) 6000rpm电缆外径Φ5mm,5蕊防油屏蔽电缆,蕊线截面积:0.14mm2(线驱动输出:8蕊,0.14 mm2)重量约100gNote:机械可承受的最高旋转速度。
环境条件使用环境温度 -10~+70℃保存温度 -25~+85℃使用环境湿度 35~85%RH(无凝露)耐电压 500VAC(50HZ/60HZ)1分钟绝缘阻抗 50MΩ以上耐振动变位振幅0.75mm,10~50HZ,3轴方向各1小时耐冲击 490m/s2 11ms 3轴方向各3回保护构造仅防尘型:IP40集电极开路输出回路线驱动器连接图输出波形 输出回路 线驱动器输出回路输出回路 接线图集电极开路连接图外形尺寸图TRD-N/NH 系列旋转编码器 特点体积小,外径Φ50mm ,厚度35mm 可根据使用环境选择防尘防滴铝铸件外壳分辩率范围1~2500P/R 采用Φ8mm 的长寿命轴电压范围在4.75~30VDC 之间 原点调整便利的方式种类外观型号 输出脉冲数/转TRD-N □-S 一相输出 1,3,4,5,10,20,30,60,100,120,200,300,360,500,600,1000 TRD-N □-RZ二相带原点输出(原点正动作)防尘ABS 塑料外壳TRD-N □-RZL二相带原点输出(原点逆动作)3,4,5,10,20,30,40,50,60,100,120,200,240,250,300,360,400,480,500,600,750,1000,1200,2000,2500TRD-N □-SW 一相输出 1,3,4,5,10,20,30,60,100,120,200,300,360,500,600,1000 TRD-N □-RZW二相带原点输出(原点正动作)防尘防滴型 铝铸外壳TRD-N □-RZWL二相带原点输出(原点逆动作)3,4,5,10,20,30,40,50,60,100,120,200,240,250,300,360,400,480,500,600,750,1000,1200,2000,2500TRD-NH □-S 一相输出 1,3,4,5,10,20,30,60,100,120,200,300,360,500,600,1000 TRD-NH □-RZ二相带原点输出(原点正动作)防尘中空轴 ABS 塑料外壳TRD-NH □-RZL二相带原点输出(原点逆动作)3,4,5,10,20,30,40,50,60,100,120,200,240,250,300,360,400,480,500,600,750,1000,1200,2000,2500TRD-NH □-SW 一相输出 1,3,4,5,10,20,30,60,100,120,200,300,360,500,600,1000 TRD-NH □-RZW 二相带原点输出(原点正动作)防尘防滴型 中空轴铝铸件外壳TRD-NH □-RZWL二相带原点输出(原点逆动作)3,4,5,10,20,30,40,50,60,100,120,200,240,250,300,360,400,480,500,600,750,1000,1200,2000,2500型号构成N NH S RZ W : 可选脉冲数和频率脉冲数/转 1 3 4 5 10 30 40 50 60100120200240250300360400480 500 600 750 1000120020002500最高响应频率(kHz )0.080.25 0.33 0.41 0.82.53.34.1 4.98.39.916192024293339 41 49 62 83100100100TRD-N □-S □TRD-NH □-S □ zzzzzzzzzzzzzzzTRD-N □-RZ □TRD-NH □-RZ□zzzzzzzzzzzzzzzzzzzzzzzzTRD-N□-RZL □ TRD-NH □-RZLzzzzzzzzzzzzzzzzzzzzzzzzTRD-N □-RZWL适用机种TRD-NH □-RZWLzzzzzzzzzzzzzzzzzzzzzzz*电气的最高响应频率由分辩率和最高旋转速度确定。