激光自动报靶系统讲解
- 格式:doc
- 大小:24.00 KB
- 文档页数:1
激光射击系统的主要特点:激光模拟射击系统原是为武警等军事单位开发的射击模拟系统,适合于军事院校、武警、军队、民兵、公安、保安等单位,为军事单位的训练提供了极低成本、高安全性的射击训练系统,为射击运动走向普及提供了技术上的支持。
现在为满足普通群众对射击运动不断增加的需求,增加了多种射击游戏和趣味射击等节目。
激光射击系统通过高清晰数字投影机把真实的各种环境逼真地投射到大屏幕上,无论是奔跑跳跃的猎物,变幻不定的靶标,还是战场上蜂涌的敌人,俯冲的战机,只要你紧握钢枪,把握时机快速射击,目标尽管躲避机警,但您的枪法更胜一筹。
整个系统画面逼真,动感刺激,配上仿佛真实的立体声效果,加上电脑自动识别计分,让每一位射手都能身临其境地感受到战场的生死离别,战争残酷。
猎场上的斗智斗勇,刺激惊险,和靶场上的冷静果断,胜利后的喜悦,为有品位的射击爱好者开辟了一片令人赏心悦目的休闲新天地,使久居闹市的人们找到一种久违的大自然的真实感受。
1:采用激光技术,激光射出后,检测系统能够自动识别并转化为标准接口,和其他大型三维射击软件结合一起,实现设备可以兼容多种射击软件,保证拥护自己可以升级最新的射击游戏----自助不求人,软件生动精彩不厌倦而绝不花升级费用。
2:军事射击和狩猎目标种类多达40多种,网上射击游戏可无尽加载。
软件涵盖各种狩猎大型动物、鸟类、鱼类、各种军事目标如飞机、坦克等,而且可以很容易增加。
3:目前我公司支持大型三维立体游戏就多达十几种,采用电影大屏幕射击,这是本公司之外产品所未见闻的。
能支持第一人称射击类(FPS)游戏,如《化解危机》、《抢滩》等大型三维游戏,三维立体效果强烈,采用过关模式,拿枪和敌人作殊死搏斗,紧张而刺激,给人以强烈震撼。
4:和大型FPS射击游戏软件接口为通用型标准接口,能够与将来的游戏接口,确保产品永不过时。
5:采用150英吋高清晰度大屏幕显示,画面清晰细致语音模拟逼真,给人以身临其境的感觉。
基于点识别的自动报靶系统胡凯;沈新锋;张瑞东【摘要】设计分为激光枪打靶和激光枪着落点识别两个部分.在正式打靶前,需要手动按键进行靶心和靶环间的距离校准,校准完成后可正式打靶.正式打靶时,手动按键控制激光枪上下左右移动并发射激光束,通过按键控制摄像头采集激光点的信息.采集完成后,通过按键控制在液晶显示屏上显示相应的闪烁点,同时在显示屏上显示激光点的方位信息和环数信息.【期刊名称】《电气自动化》【年(卷),期】2015(037)004【总页数】3页(P87-89)【关键词】打靶;激光枪;摄像头;识别;方位;环数【作者】胡凯;沈新锋;张瑞东【作者单位】南京信息工程大学信息与控制学院,江苏南京210044;南京信息工程大学信息与控制学院,江苏南京210044;南京信息工程大学信息与控制学院,江苏南京210044【正文语种】中文【中图分类】TP2720 引言本设计采用msp430F149作为核心处理器,设有打靶和报靶两套装置。
打靶装置用来打靶和按键控制发送命令,报靶装置用来接收命令进行激光点的位置识别和报靶。
1 总体设计方案图1 实物模型图本设计包含两个部分,模型如图1所示。
第一个部分是激光枪打靶。
此装置的系统结构如图 2(a)所示,硬件[1]上采用了无线模块nRF905、细分器2M542、4*4矩阵键盘、激光笔和42步进电机搭建的二维云台。
本设计中选择四个按键控制步进电机上下左右移动,选择二个按键进行靶心校准和靶环距校准,选择二个按键进行图像采集和自动报靶,选择二个按键控制激光笔的打开和关闭。
在进行靶心校准时,将激光点打到靶心位置,MCU 控制摄像头识别激光点并记录下实际靶心位置的偏差值。
在进行靶环间的距离校准时,选择任意一个靶环,将激光点打到该靶环上,MCU控制摄像头识别激光点并记录下与显示屏上所画的靶环的比例系数。
校准完成后,便可将激光笔打到摄像头拍摄范围内任一位置,通过按键控制摄像头获取激光点的横纵坐标,根据记录的偏差值自动修改,再通过按键便可显示点的方位信息和环数信息。
基于LabVIEW的激光模拟射击自动报靶系统研究简介激光模拟射击自动报靶系统是一个功能强大的训练设备,可以用于远程训练和游戏娱乐等各种场合。
本文将介绍基于LabVIEW的激光模拟射击自动报靶系统,包括系统的设计和实现。
系统设计该系统由激光系统、图像处理系统和报靶系统组成。
激光系统激光系统主要用于模拟枪击,在系统中,我们使用一支激光笔作为枪支,激光笔可以在空气中发射明亮的激光束。
为了使得激光可以被系统检测到,我们需要在激光笔上安装一个反光板,并且在笔的后面安装一个光电二极管用于检测激光的反射。
图像处理系统图像处理系统是整个系统的核心部件,它可以实时检测激光的位置和靶标的位置,并计算出弹道的偏差。
图像处理系统使用计算机视觉技术,通过摄像头对靶标进行监测,当激光击中靶标时,计算机可以通过算法判断激光击中的位置,并将数据传送给报靶系统进行计分,并且根据被击中的位置和弹道偏差,调整反光板的位置。
报靶系统报靶系统是整个系统的输出部件,它可以将激光击中的位置进行计分和显示,通过这种方式可以进行极真实的模拟射击训练。
系统实现硬件设计系统的硬件设计包括激光笔、反光板、光电二极管、摄像头、计算机等必要硬件组件,其中计算机是整个系统的核心部件,它运行着LabVIEW程序,对图像处理和报靶系统进行控制。
软件设计系统的软件设计基于LabVIEW进行,主要分为三部分:图像处理程序图像处理程序是整个系统的核心部件,它可以对靶标进行实时检测,并计算激光的位置和弹道偏差,主要代码如下所示:``` LabVIEW // 图像处理程序 void ImageProcessing() { while(!stop) { // 获取摄像头图像 Mat image; cap >> image;// 转换为灰度图像cvtColor(image, grayImage, COLOR_BGR2GRAY);// 进行边缘检测,并进行霍夫变换Canny(grayImage, edge, 50, 200, 3);vector<Vec2f> lines;HoughLines(edge, lines, 1, CV_PI / 180, 50, 0, 0);bool flag = false;double minDist = 99999999;Point2f minimumPoint;// 判断是否检测到激光for (size_t i = 0; i < lines.size(); i++){float rho = lines[i][0], theta = lines[i][1];Point pt1, pt2;double a = cos(theta), b = sin(theta);double x0 = a * rho, y0 = b * rho;pt1.x = cvRound(x0 + 1000 * (-b));pt1.y = cvRound(y0 + 1000 * (a));pt2.x = cvRound(x0 - 1000 * (-b));pt2.y = cvRound(y0 - 1000 * (a));double dist = getDistance(pt1, pt2);if (dist < 20 && dist < minDist){flag = true;minDist = dist;minimumPoint = Point2f(pt1.x, pt1.y);}}// 如果检测到了激光就进行处理if (flag){// 计算反光板的位置double pos = (minimumPoint.x - getWidth() / 2) / getPixelPerDeg ree();// 发送反光板位置信息给控制程序SendData(\。
E题:激光枪自动射击设置方案
小组人员:
小组分工:
软件编程、程序调式、全部装置组装调试
硬件设计、硬件调试、全部装置组装调试
设计报告、全部装置组装调试
总体设计方案:
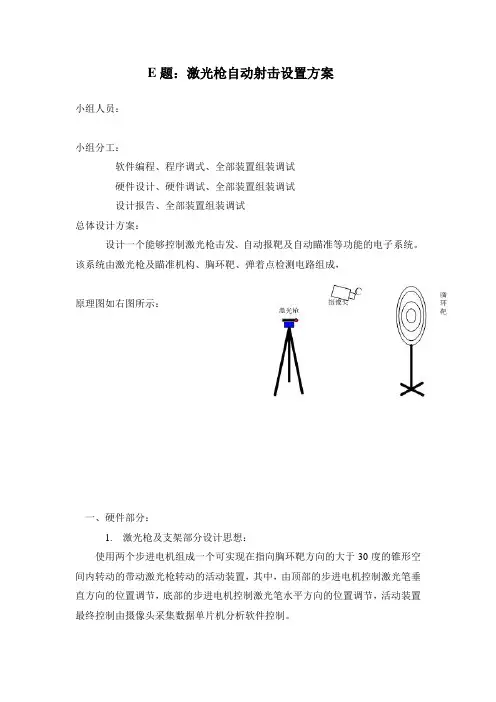
设计一个能够控制激光枪击发、自动报靶及自动瞄准等功能的电子系统。
该系统由激光枪及瞄准机构、胸环靶、弹着点检测电路组成,
原理图如右图所示:
一、硬件部分:
1. 激光枪及支架部分设计思想:
使用两个步进电机组成一个可实现在指向胸环靶方向的大于30度的锥形空间内转动的带动激光枪转动的活动装置,其中,由顶部的步进电机控制激光笔垂直方向的位置调节,底部的步进电机控制激光笔水平方向的位置调节,活动装置最终控制由摄像头采集数据单片机分析软件控制。
激光枪可由激光笔代替,安装在活动装置控制的转盘上,位置由上面的活动装置带动控制。
支架采用相机式支架。
2. 摄像头设计思想:摄像头固定在距离胸环靶一定位置处,采集激光笔打在胸环靶上的位置信息,送由单片机处理。
3. 显示靶数:由12864液晶屏显示。
4. 胸环靶:由美术纸直接画制。
二、软件部分:
单片机处理由摄像头采集回来的激光笔位置信息,并发出指令控制步进电机转动,确定激光笔的正确移动方向及正确停止位置。
三、元器件清单:
1. 两个28BYJ_48步进电机及其驱动
2. 摄像头
3. Msp430g2553单片机
4. 激光笔
5. 相机支架
6. 美术用纸
7. 12864液晶显示一个
8.3
3 点阵一个
9. 蜂鸣器等。
1 引言1.1 课题研究背景及发展方向在军队射击训练和各种体育射击比赛中,示靶、检靶、报靶和成绩的记录统计,是训练和比赛过程中的主要保障工作。
目前,这些保障工作大部分还是依靠人工来完成的。
人工报靶有着工作量大、效率低、安全性差的特点。
想要提高射击比赛或训练中报靶的效率,最主要是要解决自动报靶的问题[1]。
因此,设计制作并采用安全有效的自动报靶系统具有重要的现实意义也是迫切的现实需求。
当今较为先进的报靶系统包括光电坐标靶、图像处理坐标靶、CCD线阵靶、声电坐标靶、光纤编码坐标靶刚、双电极短路坐标靶等[2][3]。
但以上这些方法也存在着各自的不足:有的技术过于复杂、有的不能用于野外实弹射击报靶、有的成本过高、有的着弹实报率较低、不适用于连发射击训练等缺点。
目前应用较多的还有红外光电定位测试、基于图像处理模板匹配法、基于声电坐标定位法、基于光纤编码定位法、广义Hough变换法(基于图像处理)、面阵CCD 精度靶等报靶系统,都是较有效的测试方法[3]。
近年来发展起来一种新型智能自动报靶系统,与传统的实弹射击准备工序繁琐且隐藏着极大的安全隐患比较,利用这种报靶系统开展的训练将会更安全高效。
这一智能自动报靶系统由主机、从机、靶面传感器三部分构成。
具有可对射击过程全程监控,并作数据处理、自动统计以及查询成绩等功能,还可对射手存在的问题作出分析,极大地提高了训练效率[4]。
可以预见,这种新型智能自动报靶系统将会在不远的将来取代传统自动报靶系统并向更加智能化、自动化、数字化方向发展,它将可能成为未来研制报靶系统的新趋势。
1.2 基于激光坐标定位法实现的自动报靶系统简介激光坐标定位法在一些资料中也称为光电坐标定位法,光电靶是由X、Y两个方向上的激光网络构成,如图l 所示。
图1.1 光电靶将普通靶纸置于激光网络之前并与之同轴,当子弹打破靶纸,并穿越激光网络时,会阻断相应位置处X和Y两个方向上的各一路激光,从而使接收装置(光敏管)开关状态发生变化[5][6]。
一种自动报靶系统的设计与实现传统的报靶主要依靠人工实现,存在精度不高、安全隐患较大及人力资源浪费的不足。
现在市场上一些自动报靶的产品中普片存在成本高、系统比较复杂,并且占用场地等缺陷,本文所设计的报靶系统是基于多靶多人同时射击时,射手和检查监控都能实时检测子弹是否击中靶子并实现自动报靶,系统能科学、精确、实时地测量射击的环数和方位,客观、公正地评价射击训练成绩,有效地指导射击训练,满足信息化建设和训练的急需。
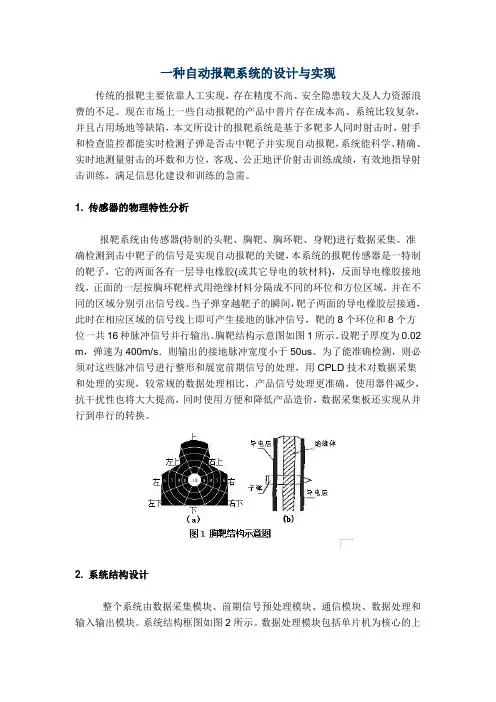
1. 传感器的物理特性分析报靶系统由传感器(特制的头靶、胸靶、胸环靶、身靶)进行数据采集。
准确检测到击中靶子的信号是实现自动报靶的关键,本系统的报靶传感器是一特制的靶子,它的两面各有一层导电橡胶(或其它导电的软材料),反面导电橡胶接地线,正面的一层按胸环靶样式用绝缘材料分隔成不同的环位和方位区域,并在不同的区域分别引出信号线。
当子弹穿越靶子的瞬间,靶子两面的导电橡胶层接通,此时在相应区域的信号线上即可产生接地的脉冲信号,靶的8个环位和8个方位一共16种脉冲信号并行输出。
胸靶结构示意图如图1所示。
设靶子厚度为0.02 m,弹速为400m/s.则输出的接地脉冲宽度小于50us。
为了能准确检测,则必须对这些脉冲信号进行整形和展宽前期信号的处理,用CPLD技术对数据采集和处理的实现,较常规的数据处理相比,产品信号处理更准确,使用器件减少,抗干扰性也将大大提高,同时使用方便和降低产品造价,数据采集板还实现从并行到串行的转换。
2. 系统结构设计整个系统由数据采集模块、前期信号预处理模块、通信模块、数据处理和输入输出模块。
系统结构框图如图2所示。
数据处理模块包括单片机为核心的上位机和以Delphi为基础开发的一个PC机监控终端。
系统可以同时进行12名射手射击,单片机上位机为每个射手显示实时成绩,PC机监控终端则可以实时显示所有射手的成绩,用于对射击的检查监控。
数据采集由特制的信号靶传感器采集;前期信号预处理采用大规模数字集成电路CPLD设计,把前几个单元电路集成在一个顶层电路,将其所实现功能写入一片CPLD芯片中,减少了电路空间,提高了总体可靠性;通信模块由微功率无线数传模块ZT—TR43U组成,具有低功耗、高可靠性、传输性能优良等特点,同时它还具备USB接口的方式,与PC机进行良好的通信;输入输出模块由键盘、液晶模块和PC机等组成。
激光自动报靶系统激光自动报靶系统类别:激光器件本电路图所用到的元器件:UM3758-108A NDR315 4072 UM3758-R289C51 在练习者的枪上安装激光发射器,同时对靶面进行改造,其上布满光敏二极管构成的点矩阵,以使发出的激光射到靶面的光敏管上,经光电转换电路变为电信号,并由无线发射电路发送出去。
在接收端的无线接收电路收到信号后,根据信号对应的二进制数值换算成射手的成绩并显示出来。
工作原理具体电路如下: (1)光电转换电路 600) {i=this.width; j=this.height;this.width=600; this.height=j/i*600;}" border=0 将运算放大器用作比较器,只要有激光照到光敏管上,光敏管电阻变小,运放V-电位低于V+电位,故输出端为高电平。
对于50cm×50cm的胸环靶,为保证激光光斑射到靶上,并落到一光敏管上,应根据光斑大小布置两光敏管的距离,同时考虑报靶的精度小于光敏管的密度,可将多个光敏管作为一个报靶信号点。
VD01、VD02两光敏管对应实际靶上的不同点,不管激光射到VD1或VD2,输出端均为高电平。
但作为显示成绩它们是同一信号点。
(2)发射电路 600) {i=this.width;j=this.height; this.width=600; this.height=j/i*600;}" border=0 该电路的核心芯片为UM3758-108A,它是一块收发两用单片编解码集成芯片,引脚T/R接高电平为编码发送,接低电平为接收译码。
选用它是因为恰好有8位数据线,可一次完成编码传送。
数据经UM3758并一串转换后再由无线发射模块NDR315发射出去。
为降低功耗,当未发射激光或未打中靶时,无线发射模块无电不工作;故将编码后的4行(或列)信号送人一4输入或门,只要击中靶面,行或列均至少有一位为高电平(第一行,第一列不设光敏管),或门的输出端就为高电平,使三极管9014饱和导通,无线发射模块得电工作。
基于 LabVIEW 的激光模拟射击自动报靶系统研究魏义虎;陈雷【摘要】To improve the target⁃scoring indication precision of laser simulation shooting,and reduce the acquisition diffi⁃culty of hitting coordinate position,the target surface with regular hexagon sensors arrayis adopted. The sensor group of each row and line are output respectively in parallel. The coordinates of hitting points are determined by acquiring Boole array of row and line inswitching value input mode. The coordinate information is transmitted through serial port communication in wireless. The hitting location and number are displayed with polar coordinates. The program is compiled with LabVIEW. The experimental results show thatthis method is simple and effective,and achieved the design requirements.%为提高激光模拟射击的报靶指示精度,降低命中位置坐标的采集难度,采用传感器正六边形分布阵列靶面,各行、列传感器组分别并联输出,以开关量输入方式采集行与列布尔数组来确定命中点坐标,通过串口通信无线传送坐标信息,以极坐标显示命中位置和环数,程序采用 LabVIEW 编写。
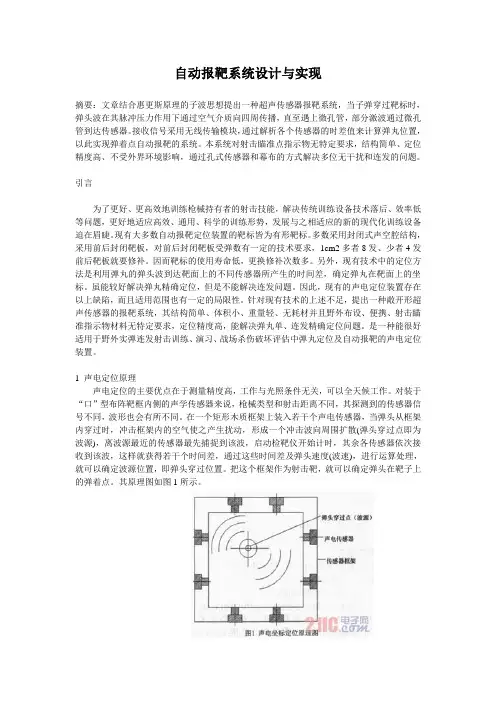
自动报靶系统设计与实现摘要:文章结合惠更斯原理的子波思想提出一种超声传感器报靶系统,当子弹穿过靶标时,弹头波在其脉冲压力作用下通过空气介质向四周传播,直至遇上微孔管,部分激波通过微孔管到达传感器。
接收信号采用无线传输模块,通过解析各个传感器的时差值来计算弹丸位置,以此实现弹着点自动报靶的系统。
本系统对射击瞄准点指示物无特定要求,结构简单、定位精度高、不受外界环境影响,通过孔式传感器和幕布的方式解决多位无干扰和连发的问题。
引言为了更好、更高效地训练枪械持有者的射击技能,解决传统训练设备技术落后、效率低等问题,更好地适应高效、通用、科学的训练形势,发展与之相适应的新的现代化训练设备迫在眉睫。
现有大多数自动报靶定位装置的靶标皆为有形靶标。
多数采用封闭式声空腔结构,采用前后封闭靶板,对前后封闭靶板受弹数有一定的技术要求,1cm2多者8发、少者4发前后靶板就要修补。
因而靶标的使用寿命低,更换修补次数多。
另外,现有技术中的定位方法是利用弹丸的弹头波到达靶面上的不同传感器所产生的时间差,确定弹丸在靶面上的坐标。
虽能较好解决弹丸精确定位,但是不能解决连发问题。
因此,现有的声电定位装置存在以上缺陷,而且适用范围也有一定的局限性。
针对现有技术的上述不足,提出一种敞开形超声传感器的报靶系统,其结构简单、体积小、重量轻、无耗材并且野外布设、便携、射击瞄准指示物材料无特定要求,定位精度高,能解决弹丸单、连发精确定位问题。
是一种能很好适用于野外实弹连发射击训练、演习、战场杀伤破坏评估中弹丸定位及自动报靶的声电定位装置。
1 声电定位原理声电定位的主要优点在于测量精度高,工作与光照条件无关,可以全天候工作。
对装于“口”型布阵靶框内侧的声学传感器来说,枪械类型和射击距离不同,其探测到的传感器信号不同,波形也会有所不同。
在一个矩形木质框架上装入若干个声电传感器,当弹头从框架内穿过时,冲击框架内的空气使之产生扰动,形成一个冲击波向周围扩散(弹头穿过点即为波源),离波源最近的传感器最先捕捉到该波,启动检靶仪开始计时,其余各传感器依次接收到该波,这样就获得若干个时间差,通过这些时间差及弹头速度(波速),进行运算处理,就可以确定波源位置,即弹头穿过位置。
自动报靶方法与设备一、背景:目前, 在部队射击训练、考核和比赛中, 示靶、检靶和成绩记录主要依靠人工完成, 这样不但效率低、可靠性差, 而且存在安全隐患【1】。
因而在很大程度上影响报靶的结果,不仅判靶效率低,而且不利于射击者准确地了解自己的成绩,不利于打靶水平的提高。
射击精度是衡量枪械类轻武器性能的一个重要指标,因此,对自动报靶方法与系统的研究具有非常重大的意义。
二、自动报靶的分类:为适应科技强军的需要,国内有许多单位对自动报靶系统进行研究,相继开发出多类射击自动报靶系统。
根据自动报靶的技术实现原理,可分为电极埋入方式、光电传感方式、图象处理方式和声电定位方式四种方式。
另外,市售的自动报靶系统根据检测手段可分为:金属片(或其他导电体)连通检测和图像识别两种方式。
1、电极埋入式自动报靶系统1.1电极埋入式自动报靶系统的工作原理工作原理:是在特制靶体的生产过程中,利用特殊的工艺,将一个由电极组成的二维网格埋入靶体的夹层里面。
当在垂直和水平方向上,每两根电极之间的间隔小于弹丸直径时,每次弹丸击穿靶体都会切断至少两根的电极。
通过测量不同编号的电极间电阻值变化就能确定弹丸击中靶体的位置,进而形成弹点坐标,判定环数。
1.2电极埋入式自动报靶系统的优缺点:①优点:响应速度快;报靶精度高。
②缺点:这种判靶方式是一次性的,每次射击后靶体即告报废。
因此,电极埋入式报靶系统成本过高。
2、光电传感方式自动报靶系统2.1光电传感方式自动报靶系统的工作原理:是在光电传感式自动报靶系统中,在靶体的四周以垂直方向和水平方向对应安装两套高灵敏度的光电收发装置(如发光二极管和感光二极管)。
这两组排列密集的发光器件所发出的光线将靶划分为矩阵式的网格状。
每个小网格对应着靶上的一个方形区域。
每一组垂直方向和水平方向光电器件编号的组合,就是靶上对应点的坐标。
在每组相邻的光电器件间距小于弹丸直径的情况下,每次弹丸通过靶体的瞬间,都会在垂直方向和水平方向上切断至少两根的光线,光线的明暗变化又使感光器件的电气参数(如输出电平)发生变化。
自动报靶系统原理
自动报靶系统是一种用于射击训练和比赛的设备,它可以自动识别和记录射击的位置和得分。
其原理是利用高精度的传感器和计算机算法,对靶子上的打击位置和弹孔进行测量和分析。
在操作中,射手通过触发器发射子弹,靶子上的传感器感知到子弹的位置和得分,并将数据传送给控制中心的计算机,计算机根据事先设定的规则和标准,生成得分和统计数据。
除此之外,自动报靶系统还具有多种功能,如分析射手的射击技巧和训练效果、实时显示得分和统计信息、记录历史数据等。
自动报靶系统的应用可以有效提高射击训练和比赛的效率和精度,提升射手的技能和成绩。
- 1 -。
目录摘要 (I)关键字 (I)Abstract (I)Key word (I)1引言 (1)1.1自动报靶在国的研究 (1)1.2基于图像处理技术自动报靶系统 (1)1.3研究的意义 (2)2传感器物理特性分析 (2)3 交汇测量原理简介 (3)4 数据储存 (4)4.1 CCD信号的处理和检取 (4)4.2 S/H和ADC选择 (4)4.3 信息压缩与储存 (5)4.4 地址发生器 (6)4.5 子弹成像点的确定 (7)4.6 交汇角的计算 (7)5 数据处理 (7)6 总结与展望 (8)6.1总结 (8)6.2展望 (8)参考文献 (9)致谢 (9)自动报靶系统的设计摘要针对于军事射击的项目特点,起于数字图像的处理、识别技术,给出了自动报靶系统的设计方案和实现的算法。
这个系统通过了对图像采集、图像处理、弹孔提取和环值判定,去实现自动报靶、数据管理(包括统计、记录、分析)等功能。
关键字图像处理;系统设计;图像采集;自动报靶Design of automatic target scoring systemAbstractAccording to the characteristic of the military rifler,a scheme of automatic target-scoring system is presented in this paper,based on digital image processing and recognition technology.This system can realize the function of automatic target-scoring and date management(statistics,record,analysis)etc,by image gathering,image process,and bullet-spot’s recognition and scoring.Key wordAutomatic Target-scoring;Image Process;System Design1引言传统的报靶主要依靠是人工实现,存在的精确度不高、安全隐患比较大以及人力资源分配的不足。
10米激光电子靶10米激光电子靶采用最先进的激光检测技术,无耗材,精度高,符合国际射联比赛规则,经过中国国家体育总局质量监督中心检测,符合射击比赛和训练的要求,10米激光电子靶适用于气步枪和气手枪的所有比赛项目微信扫一扫我公司为方便客户使用,生产了三种A、B、C型三种控制方式,控制方式简介A型控制方式采用10台12寸嵌入式工业一体机安装在操作机柜上,10台工业一体机分上下两行排列,分别对应10台电子靶。
10台80mm热敏打印机安装在一体机下方,实时打印运动员成绩。
为了提高产品稳定性以及维护简便性,我们将运动员显示器、观众显示器、手持终端的数据采用全数字的TCP/IP协议进行传输,只用一条超五类网线解决所有信号之前多条线路传输的问题。
现场比赛时,裁判员直接在中央控制台通过触摸屏就可以进行赛事管理以及成绩判罚打印的全过程,使前端正在比赛的运动员的不受外界因素的影响,为运动员成绩的正常发挥提供了良好的环境。
采用10位一体的技术,在运动员平时训练和测试中,需要几条靶道,打开几条靶道就行。
不用打开全部设备,节能降耗保护环境。
B型15寸工业一体机的设计,采用比较简洁的做法,设备配置简便,安装使用灵活。
使用一台15寸工业一体机直接连接激光电子靶,一体机集成运动员成绩显示屏、手持控制终端、中央控制台三部分功能合为一体。
通过触摸屏可以进行赛事管理以及成绩判罚打印的全过程,打印机接口为RS232接口,后期可以灵活配置。
将靶场内一体机通过TCP/IP网络连接,由服务器统一管理所有一体机的数据发送和接收。
相比其余电子靶结构来讲,比较简便,也更加稳定,特别适合于射击运动学校长期使用。
C型工业嵌入式控制台嵌入式中央控制台,采用低功耗的ARM一体机,将10台嵌入式工业一体机安装在操作台上,分上下两行排列,分别对应10台电子靶。
10台80mm热敏打印机嵌入进一体机内,实时打印运动员成绩。
我们采用稳定的嵌入式操作系统,一体机外接运动员显示器、观众显示器、手持终端等设备。
目录1 引言 (1)2 概述 (2)2.1 激光打靶系统概述 (2)2.2 本设计方案思路 (3)2.3 研发方向和技术关键 (3)2.4 主要技术指标 (3)3 总体设计 (4)3.1 激光的检测 (4)3.2 靶位的划分 (4)3.3 编码标准 (5)3.4 成绩的传送和处理 (5)3.5 其他说明 (5)4 硬件设计 (6)4.1 信号放大电路 (6)4.2 整形电路 (8)4.3 编码电路 (9)4.4 串行传送 (11)4.5 电平转换 (13)5 软件设计 (14)5.1 总体方案 (14)5.2 程序流图 (14)5.3 模块说明 (15)6 制作与调试 (18)6.1 硬件电路的布线与焊接 (18)6.2 调试 (18)7 结论 (20)致谢 (21)参考文献 (22)附录................................................................................................... 错误!未定义书签。
1 引言目前的射击打靶训练,基本以实弹训练为主,国防开支大,危险系数高。
传统的报靶方法是人工报靶,由报靶员根据经验确定靶数,带有很大的个人主观因素,可靠性、公正性差,效率低。
因此有必要研制一种切合部队实际的,在非实弹射击条件下进行射击精度训练的打靶训练器,这样既能保证部队训练质量又能减少弹药消耗、节约国防费用,具有重大的国防意义。
以光代弹,可以模拟多种武器的射击情况,并可检验射击效果。
这种新型的部队训练模拟器材是部队训练器材的一次革命,是和平时期部队训练的有效手段之一。
一些发达国家,如美国、英国、德国等都在积极进行激光射击模拟训练器材的研制,并已开发出多种系列产品,其中最突出的是美国的“米勒斯”系列,它可模拟36种武器,性能好、准确而且逼真,大大推动了部队的训练工作。
八十年代以来,我国也有单位在进行激光模拟训练器的研究和探索,将激光射击模拟器用于部队训练,取得了很好的训练效果,提高了部队的战斗力。
激光枪自动射击装置一、任务设计一个能够控制激光枪击发、自动报靶及自动瞄准等功能的电子系统。
该系统由激光枪及瞄准机构、胸环靶、弹着点检测电路组成,其结构见图1。
二、要求1.基本要求(1)用激光笔改装激光枪,激光枪可受电路控制发射激光束,激光束照射于胸环靶上弹着点的光斑直径<5mm;激光枪与胸环靶间距离为3m。
图1 简易自动报靶装置示意图(2)激光枪固定在一机构上,可通过键盘控制激光枪的弹着点(用键盘设置激光束在靶纸上上下、左右移动一定距离)。
(3)制作弹着点检测电路,通过摄像头识别激光枪投射在胸环靶上的弹着点光斑,并显示弹着点的环数与方位信息。
其中环数包括:10、9、8、7、6、5、脱靶;方位信息是指弹着点与10环区域的相对位置,包括:中心、正上、正下、正左、正右、左上、左下、右上、右下。
详见图2-b。
2.发挥部分(1)在图形点阵显示器上显示胸环靶的相应图形,并闪烁显示弹着点。
(2)自动控制激光枪,在15秒内将激光束光斑从胸环靶上的指定位置迅速瞄准击中靶心(即10环区域)。
(3)可根据任意设定的环数,控制激光枪瞄准击中胸环靶上相应位置。
(4)其他2-a 胸环靶尺寸2-b胸环靶环数及方位信息示意图2 胸环靶示意图三、说明1.激光枪可以由市场上的激光笔改造,由电路控制击发;每次击发使光斑维持3~5s时间,但此期间不得移动光斑。
2.可采用步进电机、舵机或直流电机等机构对激光枪进行两维控制,以实现瞄准。
激光枪及相关机构可由支架支撑。
3.胸环靶是在不反光的白纸画有一组相距5cm的同心圆(线宽不超过1mm),最内圆环直径10cm,圆环内为10环区域,从最内环至最外环间分别为9、8、7、6、5环区域,最外环外为脱靶。
胸环靶上不允许设置摄像头以外的传感器。
4.当激光枪的弹着点落在胸环靶的环线上时,报靶时采取就高不就低的原则。
例如,弹着点在8环与9环之间的环线上时,则认为是9环。
5.在不影响靶纸上圆环线的前提下,允许在靶纸上做标记。
激光自动报靶系统
激光自动报靶系统
类别:激光器件
本电路图所用到的元器件:UM3758-108A NDR315 4072 UM3758-R2
89C51 在练习者的枪上安装激光发射器,同时对靶面进行改造,其上布满光敏
二极管构成的点矩阵,以使发出的激光射到靶面的光敏管上,经光电转换电路
变为电信号,并由无线发射电路发送出去。
在接收端的无线接收电路收到信号后,根据信号对应的二进制数值换算成射手的成绩并显示出来。
工作原理具体电路如下: (1)光电转换电路 600) {i=this.width; j=this.height;
this.width=600; this.height=j/i*600;}" border=0 将运算放大器用作比较器,只要有激光照到光敏管上,光敏管电阻变小,运放V-电位低于V+电位,故输出端为高电平。
对于50cm×50cm的胸环靶,为保证激光光斑射到靶上,并落到一光敏管上,应根据光斑大小布置两光敏管的距离,同时考虑报靶的精度小
于光敏管的密度,可将多个光敏管作为一个报靶信号点。
VD01、VD02两光敏管
对应实际靶上的不同点,不管激光射到VD1或VD2,输出端均为高电平。
但作
为显示成绩它们是同一信号点。
(2)发射电路 600) {i=this.width;
j=this.height; this.width=600; this.height=j/i*600;}" border=0 该电路的核心芯片为UM3758-108A,它是一块收发两用单片编解码集成芯片,引脚T/
R接高电平为编码发送,接低电平为接收译码。
选用它是因为恰好有8位数据线,可一次完成编码传送。
数据经UM3758并一串转换后再由无线发射模块
NDR315发射出去。
为降低功耗,当未发射激光或未打中靶时,无线发射模块无
电不工作;故将编码后的4行(或列)信号送人一4输入或门,只要击中靶面,
行或列均至少有一位为高电平(第一行,第一列不设光敏管),或门的输出端就
为高电平,使三极管9014饱和导通,无线发射模块得电工作。
(3)接收电路600) {i=this.width; j=this.height; this.width=600;
this.height=j/i*600;}" border=0 CIS-ROIA为无线接收模块,UM3758-108A
的T/R为低电平,工作于接收模式,将CJS-RO1A收到的串行数据译码还原为
8位并行数据,送入单片机处理,由单片机转化成显示数据送出去显示。
function resizeImage(evt,obj){ newX=evt.x; newY=evt.y; obj.width=newX;
obj.height=newY;
}。