DD马达与伺服区别
- 格式:docx
- 大小:14.67 KB
- 文档页数:2
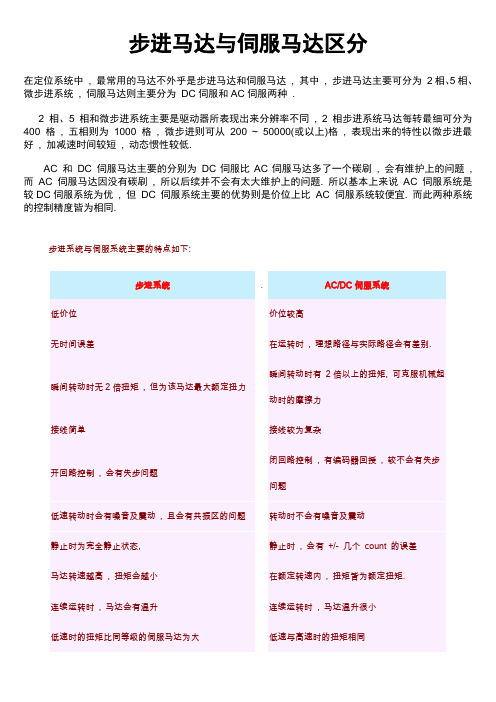
步进马达与伺服马达区分在定位系统中, 最常用的马达不外乎是步进马达和伺服马达, 其中, 步进马达主要可分为2相、5相、微步进系统, 伺服马达则主要分为DC伺服和AC伺服两种 .2相、5相和微步进系统主要是驱动器所表现出来分辨率不同, 2相步进系统马达每转最细可分为400 格, 五相则为1000 格, 微步进则可从200 ~ 50000(或以上)格, 表现出来的特性以微步进最好, 加减速时间较短, 动态惯性较低.AC 和DC 伺服马达主要的分别为DC伺服比AC伺服马达多了一个碳刷, 会有维护上的问题, 而AC 伺服马达因没有碳刷, 所以后续并不会有太大维护上的问题. 所以基本上来说AC伺服系统是较DC伺服系统为优, 但DC 伺服系统主要的优势则是价位上比AC 伺服系统较便宜. 而此两种系统的控制精度皆为相同.步进系统与伺服系统主要的特点如下:.上图为标准的步进系统(开回路)上图为脉波命令式伺服系统(半闭回路)上图为电压命令式伺服系统(全闭回路)微步进驱动技术图一(全步进,两相激磁)图二(半步进)步进驱动器脉波输入方式为何有1P(one pulse) 及2P(two pulse)之分?1. TWO pulse 方式, 亦即所谓的2P方式.所谓的TWO pulse方式,一般日系进口的定位控制器或步进驱动器皆采此种脉波格式,就是由控制器输出到步进马达驱动器的两个信号中,一个是正转脉波(CW)信号,用来输出正转方向所要移动脉波数量,另一个信号则为反转方向(CCW)信号,用来输出反转方向所要移动脉波数量,以此来控制步进马达作正反转的任意长度移动了. 此两个信号的波形如下:这种脉波输出方式会有两种不良的影响,其一,会有冲突的情况,因为若是两边因某些原因而都有输出脉波信号到驱动器,则无法确定到底驱动器是要正转还是要反转;其二,因为两边都有可能输出脉波到驱动器,若在速度变高,高频的信号较容易受到外在的干扰,所以此两个脉波信号受干扰的机率会比较大,但TWO pulse的方式,若是要让马达的转动方向颠倒,只要将此两个脉波信号互换即可,程序比较方便.2. ONE pulse方式, 也就是所谓的1P方式.所谓的ONE pulse方式,一般欧美进口的定位控制器或步进驱动器皆采此种脉波格式,就是由控制器输出到步进马达驱动器的两个信号中,有一个是脉波(pulse或step)信号,用来输出所要移动脉波数量(即长度),另一个信号为方向(direction)信号,这信号只是做信号高低准位的切换而已,用来表示马达的转动方向,如此一来,即可控制步进马达作正反转的任意长度移动了. 此两个信号的波形如下:这种脉波输出方式比TWO pulse较好,因为不会有像TWO pulse一样可能会有冲突的情形发生,且这种ONE pulse方式的受干扰可能性较TWO pulse小,因为只有一条信号有可能是高频的脉波信号(pulse),另一个方向信号(dir)则只是有时会有准位上的变化,并非高频信号,所以较不容易受到干扰,ONE pulse方式主要的缺点是若要使马达方向颠倒,不像TWO pulse方式那样方便, 而需在马达线那端互换接线来成方向颠倒的功能.。


dd马达运用的特点朋友,你知道dd马达吗?我跟你说啊,在我的工作经历里,可没少和这dd马达打交道。
我刚接触到dd马达的时候,就感觉它特别神奇。
你看啊,它的直接驱动特性,就像一个很实在的人,没有那些弯弯绕绕。
我心里就想啊,这马达可真直接,动力能直接就给到负载,中间没有像传统马达那样还要通过什么皮带啊、齿轮啊之类的传动部件。
这可不得了,这样一来,在我操作的设备中,就减少了很多因为传动部件而产生的误差。
我当时就跟同事说:“你看这dd马达,就像是个直性子,直接就把活干了,还干得漂亮。
”而且啊,这dd马达的精度特别高。
我在调试一些精密设备的时候,就全靠它了。
我心里琢磨着,这就好比是一个技艺高超的工匠,每一个动作都精准无比。
它能够把旋转角度精确到很小的范围,这在那些对精度要求极高的加工或者检测设备里,简直就是宝贝。
我有次为了一个高精度的项目,就专门向领导推荐了dd马达。
我当时很激动地说:“这个项目要是用dd 马达,那精度肯定能达标,这马达就像有一双巧手,能把活干得特别细致。
”它的响应速度也很快。
我在工作中看到它启动或者停止的时候,就像是个反应敏捷的运动员。
一旦接到指令,立马就行动起来,没有丝毫的拖沓。
我记得有次紧急调整设备的运行状态,这dd马达就迅速按照新的指令开始工作,我就暗自感叹,这马达可真靠谱啊,关键时刻不掉链子。
还有啊,这dd马达的结构很紧凑。
我在布置设备内部空间的时候就发现了这个优点。
它就像一个很会节省空间的小能手,占的地方不大,但是功能却很强大。
我在心里把它比作一个多功能的小盒子,虽然不大,但是里面装的都是有用的东西。
这在那些对设备空间有限制的地方,就特别实用。
我和其他工程师聊天的时候就说:“这dd马达啊,虽然小,但是本事可不小,在这小空间里发挥着大作用呢。
”。

dd马达原理直接开始写内容:马达是一种将电能转化为机械能的装置,是现代工业中常见的动力设备。
而dd马达则是一种特殊类型的马达,它的工作原理和结构与普通马达有所不同。
本文将介绍dd马达的工作原理及其应用。
dd马达是一种直接驱动马达,其结构简单,由电磁铁和永磁体组成。
当电流通过电磁铁时,产生的磁场会与永磁体的磁场相互作用,从而产生转矩,驱动机械运动。
相比于传统的马达,dd马达无需使用传统的电刷和换向器,因此具有更高的效率和更长的使用寿命。
dd马达的工作原理主要依赖于电磁感应和磁场相互作用的原理。
当电流通过导线时,会在周围产生磁场,而永磁体则会产生一个恒定的磁场。
当这两个磁场相互作用时,就会产生电磁力,从而驱动马达的转动。
而且由于dd马达无需使用电刷和换向器,因此可以实现无触点、无火花、无电磁干扰的运行,具有更高的安全性和稳定性。
dd马达由于其结构简单、效率高、寿命长等优点,被广泛应用于各种领域。
在工业自动化领域,dd马达常用于机械臂、自动化装配线、数控机床等设备中,实现精确的位置控制和高效的运动控制。
在家用电器领域,dd马达常用于洗衣机、空调、冰箱等产品中,实现静音、节能的运行。
此外,dd马达还被应用于新能源汽车、航空航天、医疗设备等领域,发挥着重要的作用。
总的来说,dd马达是一种结构简单、效率高、寿命长的马达,其工作原理基于电磁感应和磁场相互作用的原理。
它在工业自动化、家用电器、新能源汽车等领域有着广泛的应用,为现代生产生活带来了便利和效益。
随着科技的不断进步,相信dd马达在未来会有更广阔的发展空间,为人类社会的进步和发展做出更大的贡献。

为什么使用直接驱动DD马达?在讨论DD马达之前,我们需要了解传统的AC伺服马达。
AC伺服马达依赖于薄膜电容器来调节电流,以达到输出稳定的目的。
这种驱动方式需要用到外部的放大器和控制器。
DD马达则可以直接连接到电源和控制器,没有额外的放大器和控制器这些中间环节。
这是因为DD马达有自行调节电流的能力,无需额外的电流调节器。
这使得DD马达更加易于使用和维护。
同时,DD马达由于没有齿轮和减速器等传动系统,能够提供更高的转速和更快的响应速度。
这点在一些需要高速转动的场合非常重要。
除了这些方面,DD马达还有一些其他的优点,例如更加节能、更加安静的运行和更少的故障率等等。
当然,DD马达也有一些缺点。
相对于传统的AC伺服马达,DD马达的成本更高一些。
同时,由于DD马达没有中间环节,一旦出现问题就需要更换整个电机,而不是单独更换某个部件。
总的来说,DD马达相较于传统的AC伺服马达有着更多的优点,尤其是在需要高速转动和快速响应的场合。
同时,随着技术的不断发展,DD马达的成本也在逐渐降低,未来将会有更多的应用场景。
DD马达的应用DD马达的高速转动和快速响应特性使得它在一些特定的场合中应用广泛。
下面简单介绍一下DD马达的应用情况。
1. 3D打印3D打印领域需要高精度、高速度的驱动器来控制打印头的运动,才能获得高质量的打印效果。
传统的伺服马达难以达到这种要求。
而DD马达则可以轻松应对这些需求,使得3D打印效率和质量都得到了提升。
2. 机器人机器人系统需要高速的响应能力和快速的动作,以达到精准和有效的执行任务。
DD马达的高速转动和响应特性使得它在机器人的关节驱动等领域广受欢迎。
3. 医疗设备医疗设备需要实现精准的动作控制,并且需要保证设备运行安静、平稳。
DD马达的无齿轮设计和高效能的电路控制使得它在医疗设备领域中得到了广泛应用。
结论总的来说,DD马达相较于传统的AC伺服马达在响应速度、转速和节能等方面更具优势。
虽然DD马达的成本稍高一些,但是由于它无需额外的中间环节,使用和维护都更加方便。
新的NA-c系列加入高性能的直驱马达τDISC的行列经济型典型的直驱电机类型额定扭矩: 2.4Nm to 152Nm采用绝对式或增量式的编码器适合多行业传动需求 ※1增量式编码器: 当编码器脉冲数为1,280,000ppr时, 转速为3rps.※2增量式编码器: 当编码器脉冲数为1,000,000ppr时, 转速为4rps.※3此型号相关参数不在此手册中,请联系多们索取相关资料。
Rated speed ※Rated speed ※Rated speed ※Motor type NA100-120-A/NA100-120-B※1With separate Interpolator unit (IPU) ※2Life of bearing and runout are depend on the load※3When high precision process option is used runout can improved to 10μm ※4This value is only when the absolute position compensation option is used.A2A-801D A2A-401D A2B-401F A2B-401E A2B-801F A2B-801E 4.6 6.3 6.3 6.3kg 4.6 4.60.00340.00480.00480.0048kg・m 20.00340.003460606060μm 606060606060μm 606015N 6006006006006006001.540.300.62N・m 1515151515840,0004,300,8002,097,152sec. 1.30 1.540.300.62 1.30INCINC※11Rev. ABS※1ppr 1,000,000840,0004,300,8002,097,1521,000,000INCINC※11Rev. ABS※1564564A 2.6 2.6 2.6 5.2 5.2 5.255W 2262822822824525645545rps 4527545454N・m 27279181818N・m 99180mm 676767949494 FA FB FCmm 180180180180180 LA LB LCMotor type NA100-120-A/Flange-less type NA100-120-B/Flange typeModel VcⅡseries NCR-□DA□VPS series NCR-DC□0AC200V AC200V ±15±15±15±15sec.±15±15Motor type NA100-180-A/NA100-180-BMotor type NA100-220-A/NA100-220-B※1With separate Interpolator unit (IPU) .※2Life of bearing and runout are depend on the load.※3When high precision process option is used runout can improved to 10μm.※4This value is only when the absolute position compensation option is used.N・m kg N μm μm sec.rps A ppr sec.Motor type mm N・m N・m LC mm 408408408408408 LA LB LA LB LC2605081,344,0000.96 LCNA100-180-ANA100-180-BFlange-less type Flange-less typeModel LA LBmm 260260260260260737373989898272727434343108108108818181 LC3Model LA LB1Rev. ABS※14.53350850833811811W 4.5VPS series AC200V NCR-DC□0VcⅡseries AC200V NCR-□DA□0.18 4.5 6.8 6.81Rev. ABS※17,168,0006,815,744INCINC※1140140INCINC※11Rev. ABS※17,168,0006,815,7446025000.190.180.191401401401406060600.0346060250025002500250025006060606060±15±15±15150.0220.0220.022*********.0340.03411±15±15±1560Motor type NA100-220-ANA100-220-BFlange-less type Flange-less type A2A-801D A2A-801D38111,344,0000.96A2B-801F A2B-801E A2B-801F A2B-801E μm 6060±15±15sec.±15±15±15±15kg 0.1530.153-A2B-801E 0.1530.2230.2230.22332484848kg 3232408mm 737373989898N・m 767676152152152N・m 190190190380380380rps 222222W 955955955191019101910A 6.8 6.8 6.813.613.613.6INCINC※11Rev. ABS※1INCINC※11Rev. ABS※1ppr 1,344,0007,168,0006,815,7441,344,0007,168,0006,815,744sec.0.960.180.190.960.180.19N・m 170170170170170170N 30003000300030003000300060606060μm 606060606060A2A-801B A2A-222B VPS series AC200V NCR-DC□0VcⅡseries A2B-801F AC200V NCR-□DA□■详细参数外形尺寸径向跳动(空载)※3绝对定位精度※4转动惯量重量高度额定扭矩最大扭矩额定转速额定输出额定电流编码器类型检出脉冲数检出分辨率允许瞬间负荷※2允许轴向负荷※2轴向跳动(空轴)※3伺服驱动器外形尺寸径向跳动(空载)※3绝对定位精度※4转动惯量重量高度额定扭矩最大扭矩额定转速额定输出额定电流编码器类型检出脉冲数检出分辨率允许瞬间负荷※2允许轴向负荷※2轴向跳动(空轴)※3伺服驱动器外形尺寸径向跳动(空载)※3绝对定位精度※4转动惯量重量高度额定扭矩最大扭矩额定转速额定输出额定电流编码器类型检出脉冲数检出分辨率允许瞬间负荷※2允许轴向负荷※2轴向跳动(空轴)※3伺服驱动器■Dimensions◎ NA100-120-A/NA100-120-B◎ NA100-180-A/NA100-180-B※For separate interpolator type, please refer to the last page of this catalogue. NA100-180-B98±0.295101NA100-180-A73±0.27076L1L2L3Motor type L1L2L3Motor type NA100-120-AD NA100-120-B94±0.29197.56467±0.270.5■Dimensions ◎ NA100-220-A/NA100-220-B※Refer to the drawing in the below for the interpolator separated type.Refer to the interpolator drawing in the below. NA100-220-A NA100-220-B98±0.2L1L2L3951017073±0.276Motor type1920。
DD马达(力矩电机)的特性、应用、选型及转速、转矩、电流、电压、功率的计算方法DD马达(力矩电机)概述:(力矩电机)是一种具有软机械特性和宽调速范围的特种电机(伺服电机)。
这种电机的轴不是以恒功率输出动力而是以恒力矩输出动力。
力矩电机包括:直流力矩电机、交流力矩电机、和无刷直流力矩电机。
DD马达(力矩电机)的构造原理当负载增加时,电动机的转速能自动的随之降低,而输出力矩增加,保持与负载平衡。
力矩电机的堵转转矩高,堵转电流小,能承受一定时间的堵转运行。
由于转子电阴高,损耗大,所产生的热量也大,特别在低速运行和堵转时更为严重,因此,电机在后端盖上装有独立的轴流或离心式风机(输出力矩较小100机座号及以下除外),作强迫通风冷却,力矩电机配以可控硅控制装置,可进行调压调速,调速范围可达1:4,转速变化率≤10%。
本系列电机的特性使其适用于卷绕,开卷、堵转和调速等场合及其他用途,被广泛应用于纺织、电线电缆、金属加工、造纸、橡胶、塑料以及印刷机械等工业领域。
力矩电机主要特点[1]的特点是具有软的机械特性,可以堵转.当负载转矩增大时能自动降低转速,同时加大输出转矩.当负载转矩为一定值时改变电机端电压便可调速.但转速的调整率不好!因而在电机轴上加一测速装置,配上控制器.利用测速装置输出的电压和控制器给定的电压相比,来自动调节电机的端电压.使电机稳定!具有低转速、大扭矩、过载能力强、响应快、特性线性度好、力矩波动小等特点,可直接驱动负载省去减速传动齿轮,从而提高了系统的运行精度。
为取得不同性能指标,该电机有小气隙、中气隙、大气隙三种不同结构形式,小气隙结构,可以满足一般使用精度要求,优点是成本较低;大气隙结构,由于气隙增大,消除了齿槽效应,减小了力矩波动,基本消除了磁阻的非线性变化,电机线性度更好,电磁气隙加大,电枢电感小,电气时间常数小,但是制造成本偏高;中气隙结构,其性能指标略低于大气隙结构电机,但远高于小气隙结构电机,而体积小于大气隙结构电机,制造成本低于大气隙结构电机。
直接驱动马达—横河DD马达优点深圳朗为科技一、直接驱动(1)、负载直接与马达转子相连接。
中间无减速机构、联轴器、齿轮、丝杠等中间传动机构,这些中间机构所产生的误差是无法避免的,尤其对长时间运动所造成的机械磨损更是无法补偿。
DD马达转子直接与负载相连从而消除了中间环节所产生的误差,达到最理想的控制精度。
DD马达具有很强的刚性,直接与负载连接使得较强的刚性能够更好的体现在负载上。
(2)、伺服特性也可随时修正误差。
(3)、机械结构更加紧凑。
使机构的设计安装更加简易、噪声低、震动小稳定性更好。
(4)、无轴部分松动。
可实现高精度的轴控制,从而实现更长的精度寿命,以及可靠性。
二、外转子三、(1)、外转子结构使得转子惯量增大,可以安装较大惯量的负载,实现了大惯量(4)、转速高,大扭矩,低功率,小体积。
惯量比可达到100倍,如马达外转子惯量是0.18kgm²,则最大负载惯量可达到18kgm²。
三、十字交叉轴承(1)、十字交叉轴承又叫交叉滚珠轴承。
滚子间隔交叉彼此成直角方式排列,能同时承受来自各方向的荷重,因滚子与轨道是线接触,因此,能够承受较大荷重,产生较小的弹性形变。
(2)、旋转精度高。
十字交叉轴承内部结构采用滚子呈90°相互垂直交叉排列,滚子之间装有间隔保持器或者隔离块,可以防止滚子的倾斜所造成滚子之间的相互摩擦,有效防止了旋转扭矩的增加。
另外,不会发生滚子的一方接触现象或者锁死现象;从而获得高精度的旋转运动。
(3)、承受较大的轴向和径向负荷。
因为滚子在呈90°的V型沟槽滚动面上通过间隔保持器被相互垂直排列,这种设计使交叉滚子轴承就可以承受较大的径向负荷、轴向负荷及力矩负荷等所有方向的负荷。
三、高分辨率编码器(1)、目前横河电机DDM的编码器的种类有两种,一种是光学式,另一种是电磁方式(Resolver), 这两种方式搭配的驱动器和电缆有专门型号。
这两种编码器都是横河电机公司开发的。
高相——DD马达与伺服、步进马达的区别DD马达(Direct Drive Motor,直接驱动电机)是伺服技术发展的产物。
它取代了以往伺服机+减速机的结构设计,实现了结构简单,无机械精度损失从而实现了高定位精度,高动态响应,低噪声,外转子结构增加了转子惯量从而实现大扭矩的输出又由于该型号的马达
都配有高解析度的编码器因此该产品可达到比普通伺服更高的精度
等级等独有的特点。
然而,DD马达、伺服马达还有步进马达它们主要的区别在哪里?。
DD马达由于其输出力矩大,因此可直接称为力矩伺服。
与传统的
马达不同,该产品的驱动器可以对力矩、速度、位置进行控制使其可以直接与运动装置连接,从而省去了诸如减速剂,齿轮箱,皮带等等连接机构,因此才会称其为直接驱动马达。
伺服马达:是在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机是可以连续旋转的电-机械转换器。
以永磁式直流伺服电机和并激式直流伺服电机最为常用。
步进电机可以对旋转角度和转动速度进行高精度控制。
步进电机作为控制执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统和精密机械等领域。
例如,在仪器仪表,机床设备以及计算机的外围设备中(如打印机和绘图仪等),凡需要对转角进行精确控制的情况下,使用步进电机最为理想。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。