鲁棒控制与鲁棒控制器设计
- 格式:ppt
- 大小:1.23 MB
- 文档页数:39
鲁棒控制理论第六章引言鲁棒控制是一种应对系统参数变化、外部干扰、测量噪声等不确定性因素的控制方法。
在工程控制中,系统的不确定性是常见的,对系统的稳定性和性能造成了挑战。
鲁棒控制理论通过设计具有鲁棒性的控制器,可以保证系统在存在不确定性的情况下仍能满足一定的性能要求。
本文将介绍鲁棒控制的基本概念、设计方法和应用示例等内容。
鲁棒性分析鲁棒性分析是鲁棒控制的基础,通过分析系统的不确定性对控制器性能的影响,评估控制器的鲁棒性。
鲁棒性分析一般包括稳定性分析和性能分析两个方面。
稳定性分析稳定性是控制系统最基本的要求。
对于鲁棒控制系统,稳定性分析主要关注系统的稳定性边界,即系统参数变化在何种范围内仍能保持稳定。
常用的鲁棒稳定性分析方法包括结构化奇異值理论和小结构摄动方法等。
性能分析除了稳定性,控制系统的性能也是重要的考虑因素。
性能分析通常包括鲁棒性能和鲁棒鲁棒性能两个方面。
鲁棒性能是指系统在存在不确定性的情况下,能否满足一定的性能指标。
通过分析不确定性对闭环系统传递函数的影响,可以评估系统的鲁棒性能。
鲁棒鲁棒性能是指系统在存在不确定性的情况下,能够满足给定的鲁棒鲁棒性能规范。
鲁棒鲁棒性能设计方法包括鲁棒饱和控制器设计方法和鲁棒H-infinity控制器设计方法等。
鲁棒控制设计鲁棒控制设计是鲁棒控制理论的核心内容。
鲁棒控制设计方法包括鲁棒控制设计和鲁棒控制设计方法。
鲁棒控制设计方法鲁棒控制设计方法是通过设计鲁棒控制器来实现鲁棒控制的方法。
鲁棒控制设计方法通常分为线性鲁棒控制和非线性鲁棒控制两类。
线性鲁棒控制设计方法中,常用的方法包括μ合成方法、玛尔科夫参数跟踪方法,以及基于奇異值方法的设计等。
非线性鲁棒控制设计方法中,常用的方法包括滑模控制、自适应控制、模糊控制和神经网络控制等。
鲁棒控制设计鲁棒控制设计是指将鲁棒控制理论应用于实际控制系统中,并进行控制器设计的过程。
鲁棒控制设计需要考虑系统的性能要求、鲁棒性要求和控制器结构等因素。
自动化控制系统的鲁棒优化设计方法研究现状分析论文素材自动化控制系统的鲁棒优化设计方法研究现状分析自动化控制系统是现代工业生产中不可或缺的一部分。
通过使用控制算法、传感器和执行器,自动化控制系统能够实现生产流程的自动化,并提高生产效率和质量。
在设计自动化控制系统时,鲁棒优化是一个重要的考虑因素。
本文将对自动化控制系统的鲁棒优化设计方法进行研究现状分析。
一、鲁棒优化概述鲁棒优化是指在面对系统不确定性和外部干扰时保持控制系统的稳定性和性能。
传统的优化方法往往是基于系统准确的数学模型,但实际的控制系统常常存在模型不确定性和外部干扰,因此,需要使用鲁棒优化方法来提高控制系统的稳定性和鲁棒性。
二、鲁棒优化设计方法1. 参数整定方法鲁棒参数整定方法是一种基于系统模型的优化方法。
通过对系统模型进行分析和建模,确定系统参数的取值范围,并通过试探法或迭代算法来优化系统参数。
常见的鲁棒参数整定方法有H∞优化、线性矩阵不等式(LMI)方法等。
2. 鲁棒控制设计方法鲁棒控制设计方法是通过引入鲁棒控制器来提高控制系统的性能和鲁棒性。
常见的鲁棒控制器设计方法有H∞控制、μ合成控制等。
这些方法通过对系统模型进行描述,并结合鲁棒控制理论,设计出满足性能指标和鲁棒性要求的控制器。
3. 鲁棒优化方法在非线性系统中的应用非线性系统的优化设计涉及到非线性系统的建模和分析,以及非线性控制器的设计。
鲁棒优化方法在非线性系统中的应用主要是通过引入鲁棒控制理论,将非线性系统转化为具有线性结构的模型,并利用线性控制理论进行设计。
三、鲁棒优化设计方法的应用领域鲁棒优化设计方法在各个领域都具有重要的应用价值。
例如,在工业生产过程中,自动化控制系统的鲁棒优化设计可以提高生产效率和产品质量;在飞行器控制系统中,鲁棒优化设计可以提高系统的稳定性和安全性;在机器人控制系统中,鲁棒优化设计可以提高机器人的灵活性和适应性。
四、研究现状分析目前,国内外学者在自动化控制系统的鲁棒优化设计方法方面做了大量的研究工作。
鲁棒控制原理及应用举例摘要:本文简述了鲁棒控制的由来及其发展历史,强调了鲁棒控制在现代控制系统中的重要性,解释了鲁棒控制、鲁棒性、鲁棒控制系统、鲁棒控制器的意义,介绍了鲁棒控制系统的分类以及其常用的设计方法,并对鲁棒控制的应用领域作了简单介绍,并举出实例。
关键词:鲁棒控制鲁棒性不确定性设计方法现代控制系统经典的控制系统设计方法要求有一个确定的数学模型。
在建立数学模型的过程中,往往要忽略许多不确定因素:如对同步轨道卫星的姿态进行控制时不考虑轨道运动的影响,对一个振动系统的控制过程中不考虑高阶模态的影响等。
但经过以上处理后得到的数学模型已经不能完全描述原来的物理系统,而仅仅是原系统的一种近似。
对许多要求不高的系统,这样的数学模型已经能够满足工程要求。
然而,对于一些精度和可靠性要求较高的系统,如导弹控制系统设计,若采用这种设计方法,就会浪费了大量的人力物力在反复计算数弹道、调整控制器参数以及反复试射上。
因此,为了解决不确定控制系统的设计问题,科学家们提出了鲁棒控制理论。
由于鲁棒控制器是针对系统工作的最坏情况而设计的,因此能适应所有其它工况,所以它是解决这类不确定系统控制问题的有力工具。
鲁棒控制(Robust Control)方面的研究始于20世纪50年代。
上世纪60年代,状态空间结构理论的形成,与最优控制、卡尔曼滤波以及分离性理论一起,使现代控制理论成了一个严密完整的体系。
随着现代控制理论的发展,从上世纪80年代以来,对控制系统的鲁棒性研究引起了众多学者的高度重视。
在过去的20年中,鲁棒控制一直是国际自控界的研究热点。
通常说一个反馈控制系统是鲁棒的,或者说一个反馈控制系统具有鲁棒性,就是指这个反馈控制系统在某一类特定的不确定性条件下具有使稳定性、渐进调节和动态特性保持不变的特性,即这一反馈控制系统具有承受这一类不确定性影响的能力。
设被控系统的数学模型属于集合D,如果系统的某些特性对于集合U中的每一对象都保持不变,则称系统具有鲁棒性。

驱动电机负载模型H∞控制器设计一、引言电动机是指能将直流电能转换成机械能的旋转电机。
电动机按使用电源不同分为直流电动机、交流电动机;按照定子和转子的相对速度可分为同步电机、是异步电机。
作为最常用的驱动执行器,它在车辆中应用广泛,如门窗的起降,自动雨刮器,电动汽车驱动,冷却风扇,发动机起动机等等。
目前电机的控制,尤其是直流电机的控制方法,主要以PID控制和LQR控制为主。
随着汽车性能要求的不断提高,人们越来越关注于系统的稳定性,对于电机的控制也提出了新的要求。
尤其是作为电动汽车的驱动电机,在车辆行驶过程中,特别是高速行驶中,一个微小的摄动可能会对车辆运动产生很大的影响。
在驱动电机工作过程中,由于环境温度变化等工作状况的变动;外部路面干扰;车辆负载突增;老化机械参数变化;建模误差等缘故,会造成模型不精确,也就是模型的不确定性是广泛存在,不可避免的。
因此,需要一种固定的控制器,可以保证模型与实际系统出现偏差时,仍能保持所需的控制品质。
而鲁棒性就是系统的强壮性。
这便引出了使用鲁棒控制来解决电机负载扰动这一问题的讨论。
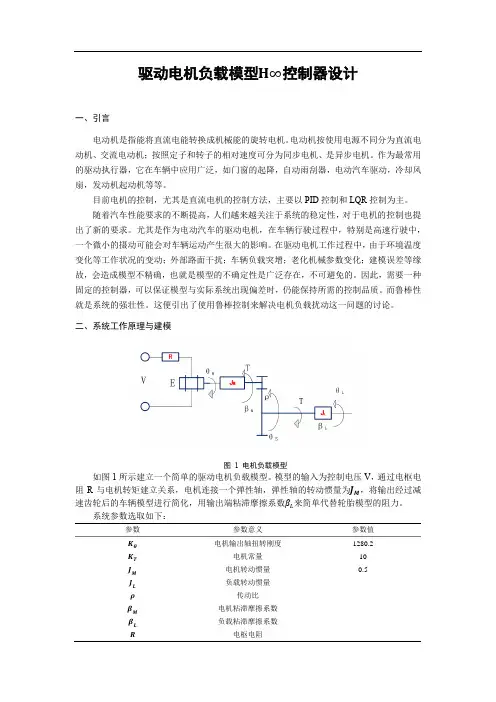
二、系统工作原理与建模图 1 电机负载模型如图1所示建立一个简单的驱动电机负载模型。
模型的输入为控制电压V,通过电枢电阻R与电机转矩建立关系,电机连接一个弹性轴,弹性轴的转动惯量为J M,将输出经过减速齿轮后的车辆模型进行简化,用输出端粘滞摩擦系数βL来简单代替轮胎模型的阻力。
系统参数选取如下:参数参数意义参数值Kθ电机输出轴扭转刚度1280.2K T电机常量10J电机转动惯量0.5MJ负载转动惯量Lρ传动比β电机粘滞摩擦系数Mβ负载粘滞摩擦系数LR电枢电阻建立系统的微分方程。
首先,电机扭矩与电流直接相关:M =K T ×I其中K T 是电机固有参数。
接下来建立驱动电机负载模型的扭矩关系式:J L ×ωL +K θ(θL −θM ρ)+βL ×ωL =0 (1) J M ×ωM =K T ×I −βM ×ωM +K θρ(θL −θM ρ) (2) 设置电机负载系统输入为电压值V ,输出为负载转速ωL ,建立驱动电机负载模型的状态空间方程。
具有鲁棒性的控制设计方法控制系统的设计和实现通常面临着各种不确定性和外部扰动的挑战。
为了克服这些问题并确保系统能够稳定和可靠地运行,具有鲁棒性的控制设计方法变得至关重要。
在本文中,将介绍一些常用的鲁棒控制设计方法,并探讨它们的优点和适用范围。
一、H∞控制方法H∞控制方法是一种广泛应用于工业控制系统中的鲁棒控制方法。
它的核心思想是通过优化控制器的H∞范数性能指标,使得控制系统对不确定性和扰动具有一定的鲁棒性。
H∞控制方法可以通过对控制器设计的性能要求进行权衡,从而实现系统的稳定性和鲁棒性。
H∞控制方法的主要优点是能够有效地处理各种不确定性和扰动,并具有较好的鲁棒性。
然而,它也存在一些局限性,例如需要对系统模型的不确定性进行较为准确的描述,以及对系统的结构进行一定的约束。
二、μ合成控制方法μ合成控制方法是一种基于现代控制理论的鲁棒控制方法。
它通过优化控制器的μ性能指标,实现系统的鲁棒性和性能要求之间的权衡。
μ合成控制方法能够有效地处理不确定性和扰动,并在实际应用中取得了良好的效果。
μ合成控制方法的主要优点是能够在控制器设计过程中兼顾系统的性能和鲁棒性要求,并具有较好的数学理论基础。
然而,μ合成控制方法也存在一些技术难题,例如需要进行复杂的计算和优化,并对系统的结构和参数进行一定的限制。
三、鲁棒PID控制方法鲁棒PID控制方法是一种基于传统PID控制算法的鲁棒控制方法。
它通过在PID控制器中引入补偿器,实现对系统不确定性和扰动的补偿,从而提高系统的稳定性和鲁棒性。
鲁棒PID控制方法的主要优点是简单易用,适用于各种不确定性和扰动情况,并且不需要对系统模型进行精确的描述。
然而,鲁棒PID 控制方法也存在一些问题,例如控制器的性能受限于PID结构的局限性,并且对不确定性和扰动的补偿能力有一定的限制。
四、自适应控制方法自适应控制方法是一种通过在线估计和补偿系统的不确定性和扰动的鲁棒控制方法。
它通过不断更新控制器的参数,使系统能够自适应地应对不确定性和扰动的变化,从而实现系统的鲁棒稳定性。
第一章概述§1.1 不确定系统和鲁棒控制(Uncertain System and Robust Control)1.1.1 名义系统和实际系统(nominal system)控制系统设计过程中,常常要先获得被控制对象的数学模型。
在建立数学模型的过程中,往往要忽略许多因素:比如对同步轨道卫星的姿态进行控制时不考虑轨道运动的影响,对一个振动系统的控制过程中,不考虑高阶模态的影响,等等。
这样处理后得到的数学模型仍嫌太复杂,于是要经过降阶处理,有时还要把非线性环节进行线性化处理,时变参数进行定常化处理,最后得到一个适合控制系统设计使用的数学模型。
经过以上处理后得到的数学模型已经不能完全描述原来的物理系统,而仅仅是原系统的一种近似,因此称这样的数学模型为“名义系统”,而称真实的物理系统为“实际系统”,而名义系统与实际系统的差别称为模型误差。
1.1.2不确定性和摄动(Uncertainty and Perturbation)如立足于名义系统,可认为名义系统经摄动后,变成实际系统,这时模型误差可视为对名义系统的摄动。
如果立足于实际系统,那么可视实际系统由两部分组成:即已知的模型和未知的模型(模型误差),如果模型的未知部分并非完全不知道,而是不确切地知道,比如只知道某种形式的界限(如:范数或模界限等),则称这部分模型为实际模型的不确定部分,也说实际系统中存在着不确定性,称含有不确定部分的系统为不确定系统。
模型不确定性包括:参数、结构及干扰不确定性等。
1.1.3 不确定系统的控制经典的控制系统设计方法要求有一个确定的数学模型(可能是常规的,也可能是统计的)。
以往,由于对一般的控制系统要求不太高,所以系统中普遍存在的不确定性问题往往被忽略。
事实上,对许多要求不高的系统,在名义系统的基础上进行分析与设计已经能够满足工程要求,而对一些精度和可靠性要求较高的系统,也只是在名义系统基础上进行分析和设计,然后考虑模型的误差,用仿真的方法来检验实际系统的性能(如稳定性、暂态性能等)。
鲁棒控制理论与鲁棒性分析随着现代科技的飞速发展,控制理论也在不断进步和完善。
其中,鲁棒控制理论及其分析方法成为了控制领域的重要研究方向。
鲁棒控制理论可以有效应对系统中存在的不确定性和干扰,保证系统能够在各种工作条件下稳定运行。
本文将介绍鲁棒控制理论及其分析方法的基本概念,并探讨其在工程领域中的应用。
一、鲁棒控制理论的基本概念鲁棒控制理论是一种以应对系统不确定性和干扰为核心的控制理论。
其目标是设计出能够保持系统稳定性和性能的控制器,即使面对系统参数变化、外部干扰等不确定因素时也能保证系统正常运行。
鲁棒控制理论主要包括鲁棒稳定性和鲁棒性能两个方面。
鲁棒稳定性是指控制系统在存在不确定性和干扰的情况下依然能够保持稳定。
鲁棒性能则是指控制系统在面对不确定因素时所能达到的最优性能。
鲁棒控制理论强调了系统的鲁棒性,即控制器设计要考虑到系统中各种不确定性带来的影响,并保证系统能够在不确定因素的影响下维持良好的性能。
二、鲁棒性分析的方法为了评估和分析控制系统的鲁棒性,人们提出了一系列的鲁棒性分析方法。
这些方法可以帮助我们更好地了解系统的鲁棒性,并找到改进控制器设计的方法。
1. 频域方法基于频域的鲁棒性分析方法是常用的方法之一。
它通过分析系统在频率域上的特性来评估系统的鲁棒性。
通过构建频率响应函数、辐盘等图形,可以直观地观察到系统不稳定的原因,从而对控制器进行调整和改进。
2. 状态空间方法另一种常用的鲁棒性分析方法是基于系统的状态空间模型。
通过分析系统的状态空间特性,可以得到系统的鲁棒性边界,即系统能够容忍的不确定性范围。
这种方法对于多变量系统的鲁棒性分析具有重要的作用。
3. 线性矩阵不等式方法线性矩阵不等式(LMI)方法是一种广泛应用于鲁棒性分析的方法。
它通过构建线性矩阵不等式,并利用数学求解的方法得到满足鲁棒性要求的控制器参数范围。
LMI方法不仅可以用来评估系统的鲁棒性,还可以用于控制器设计和优化。
三、鲁棒控制理论在工程中的应用鲁棒控制理论具有很强的实用性,在工程领域中有着广泛的应用。
最优控制问题的鲁棒H∞控制设计随着科技的发展,控制理论在工程领域发挥着越来越关键的作用。
最优控制是控制理论中的一个重要分支,它的目标是在给定的约束条件下,使系统的性能达到最佳。
然而,实际系统常常受到各种不确定因素的干扰,这就需要应用鲁棒控制来解决这些问题。
本文将探讨最优控制问题的鲁棒H∞控制设计。
1. 引言最优控制问题是控制理论中的一个经典问题,它的目标是在给定的约束条件下,通过合适的控制策略使系统的性能达到最佳。
最优控制的方法有很多种,比如动态规划、最优化理论等。
而鲁棒控制是一种可以应对系统参数不确定性或者外部干扰的控制方法。
H∞控制是鲁棒控制的一种重要方法,可以有效地抑制系统的不确定性,并在一定程度上保证系统的稳定性和性能。
2. 最优控制与鲁棒控制的结合最优控制问题的解决需要考虑系统的性能以及各种约束条件,而鲁棒控制则可以应对系统参数变化或者外部扰动对系统性能的影响。
将最优控制和鲁棒控制相结合,可以得到更加鲁棒的控制策略。
在最优控制问题中引入鲁棒性的考虑,可以通过引入H∞范数来描述系统的性能和不确定性。
H∞范数可以有效地衡量系统的响应对不确定因素的敏感程度,通过优化H∞范数,可以得到更加鲁棒的控制策略。
3. 鲁棒H∞控制设计的方法鲁棒H∞控制设计的关键是确定系统的H∞范数和设计合适的控制器来优化H∞范数。
通常可以采用以下步骤进行鲁棒H∞控制设计:(1) 确定系统的数学模型,并分析系统的不确定性和外部干扰。
(2) 设计系统的H∞性能指标,可以根据系统的需求和约束条件来确定。
(3) 根据系统的H∞指标和约束条件,设计合适的控制器结构。
可以采用线性控制器,如PID控制器,或者非线性控制器,如模糊控制器等。
(4) 利用数学工具和优化算法,优化系统的H∞范数,得到最优的控制器参数。
(5) 实施最优控制器,并进行系统的仿真和实验验证。
4. 实例分析为了更好地理解鲁棒H∞控制设计的方法和效果,我们选取一个简单的控制系统进行实例分析。
驱动电机负载模型H8控制器设计一、引言电动机是指能将直流电能转换成机械能的旋转电机。
电动机按使用电源不同分为直流电动机、交流电动机;按照定子和转子的相对速度可分为同步电机、是异步电机。
作为最常用的驱动执行器,它在车辆中应用广泛,如门窗的起降,自动雨刮器,电动汽车驱动,冷却风扇,发动机起动机等等。
目前电机的控制,尤其是直流电机的控制方法,主要以PID控制和LQR 控制为主。
随着汽车性能要求的不断提高,人们越来越关注于系统的稳定性,对于电机的控制也提出了新的要求。
尤其是作为电动汽车的驱动电机,在车辆行驶过程中,特别是高速行驶中,一个微小的摄动可能会对车辆运动产生很大的影响。
在驱动电机工作过程中,由于环境温度变化等工作状况的变动;外部路面干扰;车辆负载突增;老化机械参数变化;建模误差等缘故,会造成模型不精确,也就是模型的不确定性是广泛存在,不可避免的。
因此,需要一种固定的控制器,可以保证模型与实际系统出现偏差时,仍能保持所需的控制品质。
而鲁棒性就是系统的强壮性。
这便引出了使用鲁棒控制来解决电机负载扰动这一问题的讨论。
二、系统工作原理与建模u S图1电机负载模型如图1所示建立一个简单的驱动电机负载模型。
模型的输入为控制电压V,通过电枢电阻R与电机转矩建立关系,电机连接一个弹性轴,弹性轴的转动惯量为丿"将输出经过减速齿轮后的车辆模型进行简化,用输出端粘滞摩擦系数炕来简单代替轮胎模型的阻力。
系统参数选取如下:参数参数意义参数值电机输出轴扭转刚度1280. 2陶电机常量10J M电机转动惯量0.5J L负载转动惯量p传动比电机粘滞摩擦系数P L负载粘滞摩擦系数R电枢电阻建立系统的微分方程。
首先,电机扭矩与电流直接相关:M = K T XI其中陌是电机固有参数。
接下来建立驱动电机负载模型的扭矩关系式:X + Kg—+ 仇 X 3L = 0( 1 )J M X =/<T X Z — /?M X O>M + —(——)( 2 )p p设置电机负载系统输入为电压值V,输出为负载转速⑰,建立驱动电机负载模型的状态空间方程。
《鲁棒控制与鲁棒控制器设计》鲁棒控制是指在系统存在不确定性和外部干扰的情况下仍然能够保证系统稳定性和性能的控制方法。
在现实生活中,控制系统往往会受到各种不确定因素的影响,如参数变化、外部扰动、测量误差等。
鲁棒控制的目标就是在这些不确定性的情况下,保持系统的稳定性和性能。
鲁棒控制器设计是实现鲁棒控制的关键环节。
其设计目标是要求控制器能够在不确定性和外部干扰的情况下仍然能够保持系统的稳定性和性能。
鲁棒控制器设计的方法有很多种,下面介绍两种常见的设计方法:1.H∞鲁棒控制H∞鲁棒控制是一种基于频域的鲁棒控制方法。
它通过最小化系统输入输出的γ范数来设计控制器,使系统对不确定性和外部干扰具有鲁棒稳定性和鲁棒性能。
H∞鲁棒控制的设计流程一般包括以下几个步骤:首先,建立系统模型,获取系统的传递函数;然后,根据系统模型设计一个传递函数为V的鲁棒性能权值V;接着,利用V来计算问题的解;最后,根据问题的解设计出最优的鲁棒控制器。
2.μ合成鲁棒控制μ合成鲁棒控制是一种基于频域分析的鲁棒控制方法。
它通过合成满足一定性能要求的不确定性权值函数,来设计鲁棒控制器。
μ合成鲁棒控制的基本思想是先构造正向控制律,使得系统的输出能够满足给定性能要求;然后,构造反向控制律,抵消系统的不确定性和外界干扰,使得系统具有鲁棒稳定性。
以上是两种常见的鲁棒控制器设计方法,它们都能够有效地确保系统在不确定性和外部干扰的情况下仍能保持稳定性和性能。
在实际应用中,根据具体系统的特点和需求,可以选择合适的鲁棒控制器设计方法来解决问题。
总结起来,鲁棒控制器设计是鲁棒控制的关键环节之一、通过合适的设计方法,能够使系统在面对不确定性和外部干扰的情况下仍然能够保持稳定性和性能。
在实际应用中,我们应根据具体情况选择合适的鲁棒控制器设计方法,以满足系统的要求。