间隙补偿和螺距补偿
- 格式:docx
- 大小:12.67 KB
- 文档页数:2
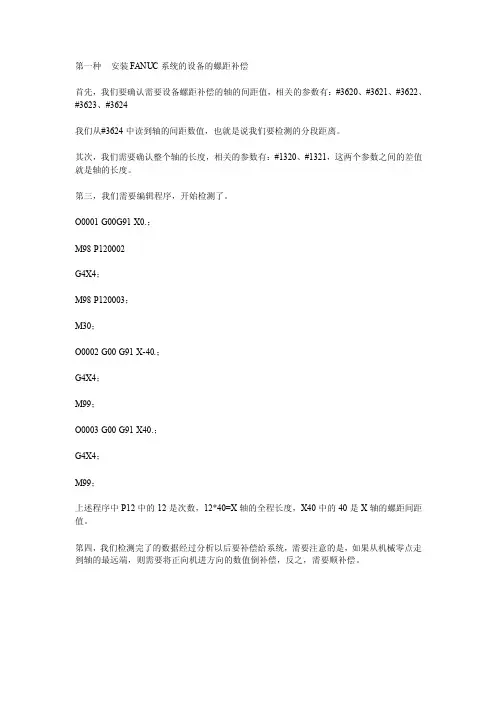
第一种安装FANUC系统的设备的螺距补偿首先,我们要确认需要设备螺距补偿的轴的间距值,相关的参数有:#3620、#3621、#3622、#3623、#3624我们从#3624中读到轴的间距数值,也就是说我们要检测的分段距离。
其次,我们需要确认整个轴的长度,相关的参数有:#1320、#1321,这两个参数之间的差值就是轴的长度。
第三,我们需要编辑程序,开始检测了。
O0001 G00G91 X0.;M98 P120002G4X4;M98 P120003;M30;O0002 G00 G91 X-40.;G4X4;M99;O0003 G00 G91 X40.;G4X4;M99;上述程序中P12中的12是次数,12*40=X轴的全程长度,X40中的40是X轴的螺距间距值。
第四,我们检测完了的数据经过分析以后要补偿给系统,需要注意的是,如果从机械零点走到轴的最远端,则需要将正向机进方向的数值倒补偿,反之,需要顺补偿。
第二种安装三菱系统的设备的螺距补偿开始的两个步骤都一致,我们只要确认了轴的全长和间距值就可以了。
第三,编辑程序O0000 G91G28X0.;G90G0X0.5;G4X1;G00X0.;G4X6;M98 P11L20;G90G0X-800.5;G4X1;G00X-800.;G4X6;M98 P12L20;M99;O0011 G91G0X0.;X-40.;G4X4;M99;O0022 G91G0X0.;X40.;G4X4;M99;第四,我们选择从机械0到-800处的检测顺序。
检测出来的数据分为两页,正向20点,负向20点,第一页中补偿负向的数值,并且从#127开始倒序补入,补偿的数值需要乘2。
第二页中补偿正向的数值,并且从#256开始倒序补入,补偿的数值需要乘2。
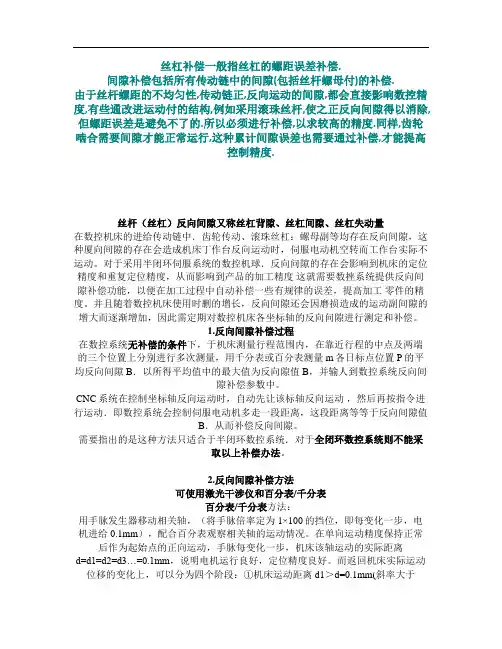
丝杠补偿一般指丝杠的螺距误差补偿.间隙补偿包括所有传动链中的间隙(包括丝杆螺母付)的补偿.由于丝杆螺距的不均匀性,传动链正,反向运动的间隙,都会直接影响数控精度,有些通改进运动付的结构,例如采用滚珠丝杆,使之正反向间隙得以消除,但螺距误差是避免不了的.所以必须进行补偿,以求较高的精度.同样,齿轮啮合需要间隙才能正常运行,这种累计间隙误差也需要通过补偿,才能提高控制精度.丝杆(丝杠)反向间隙又称丝杠背隙、丝杠间隙、丝杠失动量在数控机床的进给传动链中.齿轮传动、滚珠丝杠:螺母副等均存在反向间隙,这种厦向间隙的存在会造成机床丁作台反向运动时,伺服电动机空转而工作台实际不运动。
对于采用半闭环伺服系统的数控机球.反向问隙的存在会影响到机床的定位精度和重复定位精度,从而影响到产品的加工精度这就需要数挫系统提供反向间隙补偿功能,以便在加工过程中自动补偿一些有规律的误差,提高加工零件的精度。
并且随着数控机床使用时删的增长,反向间隙还会因磨损造成的运动副间隙的增大而逐渐增加,因此需定期对数控机床各坐标轴的反向问隙进行测定和补偿。
1.反向间隙补偿过程在数控系统无补偿的条件下,于机床测量行程范围内,在靠近行程的中点及两端的三个位置上分别进行多次测量,用千分表或百分表测量m各日标点位置P的平均反向间隙B.以所得平均值中的最大值为反向隙值B,并输人到数控系统反向间隙补偿参数中。
CNC系统在控制坐标轴反向运动时,自动先让该标轴反向运动,然后再按指令进行运动.即数控系统会控制伺服电动机多走一段距离,这段距离等等于反向间隙值B.从而补偿反向间隙。
需要指出的是这种方法只适合于半闭环数控系统.对于全闭环数控系统则不能采取以上补偿办法。
2.反向间隙补偿方法可使用激光干涉仪和百分表/千分表百分表/千分表方法:用手脉发生器移动相关轴,(将手脉倍率定为1×100的挡位,即每变化一步,电机进给0.1mm),配合百分表观察相关轴的运动情况。
![9.1 螺距误差补偿[共2页]](https://uimg.taocdn.com/9edc6295a8956bec0975e3f8.webp)
第9章系统补偿功能与SIMODRIVE611D驱动优化
机床在对工件进行加工的过程中,由于测量系统、力的传递过程中产生的误差、机床自身磨损或装配工艺问题的影响,加工工件的轮廓会偏离理想的几何曲线,导致加工工件产品质量的下降。
特别是在加工大型的工件时,由于温度和机械力的影响,加工精度损失更为严重。
因而在机床出厂前,需要进行一定的误差补偿。
螺距误差补偿和反向间隙补偿是两种最常见的补偿方式,还有温度补偿、垂直度补偿、跟随误差补偿以及摩擦补偿也比较常见。
另外,在机械传动结构良好的情况下,要使机械系统与电气系统达到更加良好的匹配,需要通过驱动优化来实现。
9.1 螺距误差补偿
螺距误差的补偿是按坐标轴来进行的,轴的补偿曲线如图9-1所示。
图9-1 轴的补偿曲线
激活误差补偿需设定以下相关机床参数。
① MD 38000 轴最大误差补偿点数。
根据该机床的特点,X轴螺距误差参数补偿点数为50,即MD 38000 [0 AX1] =50;Z轴螺距误差补偿点数为100,即MD 38000 [0 AX2] =100。
参数设定好后,系统自动产生相应轴的补偿文件,补偿文件存放在目录/NC-ACTIVE-DATA/Meas-System-err-comp下。
可以修改每轴的补偿点数。
如果改变MD38000,系统会在下一次上电时重新对内存进行分配。
建议在修改该参数之前,备份已存在的零件加工程序、R 参数和刀具参数的驱动数据。
② MD32700螺距误差补偿使能。
MD32700=0 螺距补偿不生效,允许修改补偿文件。
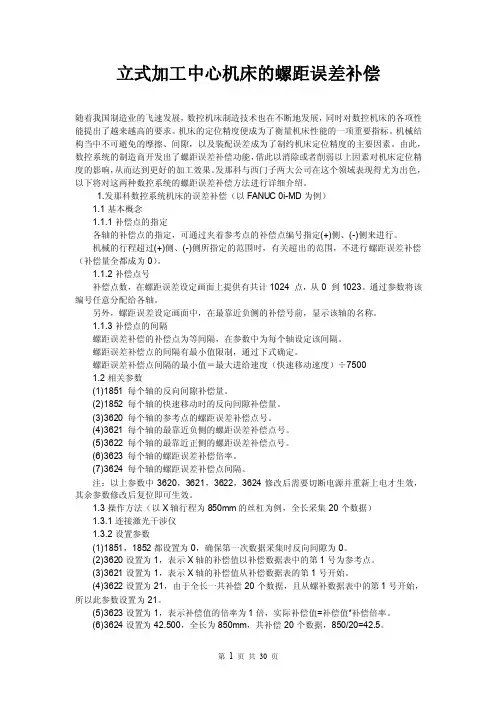
立式加工中心机床的螺距误差补偿随着我国制造业的飞速发展,数控机床制造技术也在不断地发展,同时对数控机床的各项性能提出了越来越高的要求。
机床的定位精度便成为了衡量机床性能的一项重要指标。
机械结构当中不可避免的摩擦、间隙,以及装配误差成为了制约机床定位精度的主要因素。
由此,数控系统的制造商开发出了螺距误差补偿功能,借此以消除或者削弱以上因素对机床定位精度的影响,从而达到更好的加工效果。
发那科与西门子两大公司在这个领域表现得尤为出色,以下将对这两种数控系统的螺距误差补偿方法进行详细介绍。
1.发那科数控系统机床的误差补偿(以FANUC 0i-MD为例)1.1基本概念1.1.1补偿点的指定各轴的补偿点的指定,可通过夹着参考点的补偿点编号指定(+)侧、(-)侧来进行。
机械的行程超过(+)侧、(-)侧所指定的范围时,有关超出的范围,不进行螺距误差补偿(补偿量全都成为0)。
1.1.2补偿点号补偿点数,在螺距误差设定画面上提供有共计1024 点,从0 到1023。
通过参数将该编号任意分配给各轴。
另外,螺距误差设定画面中,在最靠近负侧的补偿号前,显示该轴的名称。
1.1.3补偿点的间隔螺距误差补偿的补偿点为等间隔,在参数中为每个轴设定该间隔。
螺距误差补偿点的间隔有最小值限制,通过下式确定。
螺距误差补偿点间隔的最小值=最大进给速度(快速移动速度)÷75001.2相关参数(1)1851 每个轴的反向间隙补偿量。
(2)1852 每个轴的快速移动时的反向间隙补偿量。
(3)3620 每个轴的参考点的螺距误差补偿点号。
(4)3621 每个轴的最靠近负侧的螺距误差补偿点号。
(5)3622 每个轴的最靠近正侧的螺距误差补偿点号。
(6)3623 每个轴的螺距误差补偿倍率。
(7)3624 每个轴的螺距误差补偿点间隔。
注:以上参数中3620,3621,3622,3624修改后需要切断电源并重新上电才生效,其余参数修改后复位即可生效。
螺距误差补偿及反向间隙补偿根据下表设置螺距误差补偿相关参数:参数号参数位设定值设置说明3620 XZ 100200每个轴的参考点的螺距误差补偿点号3621 XZ 负方向最远的补偿位置号根据下面的公式进行计算:参考点的补偿位置号—(负方向的机床行程/补偿位置间隔)+ 1 100-(1000/50)+1=81 所以负方向补偿位置号设置为813622 XZ 正方向的最远补偿位置号根据下面的公式进行计算:参考点的补偿位置号+(正方向的机床行程/补偿位置间隔)+ 1 100+(0/50)+1=101 所以参考点正方向补偿位置号为101.3624 补偿点间隔输入格式为无小数点输入格式,由于X轴为直径值编程,所以X轴补偿点间隔应为实际补偿点间隔的2倍,应设置为100000,为100mm.参数号参数位设定值设置说明1800 #4(RBK) 是否分别进行切削进给/快速移动反向间隙补偿0: 不进行。
1: 进行。
1851 XZ 每个轴的反向间隙补偿量,设置后,回零生效1852 XZ 每个轴的快速移动时的反向间隙补偿量,回零生效由于FANUC系统螺距误差补偿采用增量式的补偿方式,所以在进行螺距误差补偿时,需根据补偿数据进行补偿数据的设定个。
下表为螺距误差补偿表由于每个补偿点的最大补偿值只能到7,在上表中可以看到,在-400mm测量位置处出现了一次22的值,此点是所有补偿点误差的最大值,所以补偿倍率按此点进行计算,而且考虑其它点的误差值,将补偿倍率设置为3倍。
补偿倍率设置为3倍,所有的补偿值都放大了三倍,所以在补偿数据处看到的是计算值的1/3,如果测量人员给出的是补偿值,那么补偿数据就按上图中的数据进行输入,如果给出的是误差值,则需将上图中的补偿数据取反。
螺距误差补偿在回零后即可生效。


兄弟机床螺距补偿方法兄弟机床(Brother Machine Tools)的螺距补偿方法通常涉及到数控机床(CNC Machine Tools)的定位精度调整。
螺距补偿是提高数控机床定位精度的一种常见方法,它能够减少由于机床丝杠螺距误差引起的定位误差。
以下是兄弟机床进行螺距补偿的一般步骤。
1.准备工作:确保机床处于正常工作状态。
根据机床型号和使用的数控系统,查阅相关手册或技术资料,了解螺距补偿的具体步骤和参数。
2.安装和设置:在机床上安装好激光干涉仪或其他测量设备,用于精确测量机床的运动。
根据机床制造商的指导,设置相关的参数,这些参数可能包括补偿的起始点、结束点、补偿点之间的间距等。
3.测量和调整:使用激光干涉仪测量机床的运动轨迹,获取实际的位移数据。
根据测量结果,调整机床的螺距补偿参数,以补偿实际的螺距误差。
4.程序编制:编写或调整机床的运动程序,确保程序中包含了螺距补偿的指令。
5.试运行和验证:启动机床程序,进行试运行,确保补偿效果符合预期。
多次测量并取平均值,以验证补偿后的定位精度。
6.参数输出和文档记录:将补偿后的参数输出,并记录在相应的技术文档中。
如果需要,更新机床的维护和操作手册,以反映最新的补偿参数。
7.机床重启和日常操作:重启机床,使新的补偿参数生效。
在日常操作中,遵循机床制造商的指导,定期检查和维护补偿参数。
请注意,上述步骤是一般性的指导,具体的螺距补偿方法可能会根据机床型号、数控系统型号以及制造商的推荐有所不同。
在进行螺距补偿之前,建议详细阅读机床制造商提供的技术资料和操作手册,并在专业人员的指导下进行操作。
1.获得厂商权限:Men u——》启动——》设定口令——》sunrise
2.设定机床参数:Men u——》启动——》机床数据——》轴MD——》修改参数38000(最大补偿点数)——》修改参数32450(反向间隙补偿)——》32700(0 可以写补偿,1 写保护)设为0——》设MD有效
3.备份:Men u——》启动——》服务——》连续起动——创建文档——》选中NC和补偿,文件名自定义——》文档。
4.回装:Men u——》启动——》服务——》连续起动——创建文档——》读入文档——》选择备份的文档,紧停拍下。
5.修改螺距补偿文件:Men u——》启动——》服务——》数据管理——》找到文件夹,NC 生效数据,测量系统误差补偿,螺距补偿文件——》复制到“工件”目录下——》修改——》复制到“零件程序”目录下。
6.程序运行:先各轴回零,再运行螺距补偿程序。
7.修改写保护:Men u——》启动——》机床数据——》轴MD——》修改参数32700(0 可以写补偿,1 写保护)设为1——》设MD有效——》NCK复位
8.看是否生效:启动——》诊断——》服务显示——》轴调整。
注:出现44000报警的都要备份回装。
表格插补的功能包开启:19330第2行05位选中,推出后19330变成20H。
三菱数控系统MITSUBISHI螺距误差补偿及反向间隙参数号项⽬说明设定范围4000pinc误差补偿⽅法确定采⽤误差绝对值或误差增量值进⾏补偿0:误差绝对值法1:误差增量值法轴参数号项⽬说明设定范围4001cmpax基本轴指定误差补偿基本轴的地址1.螺距误差补偿时,设定补偿轴的名称2.相对位置补偿时,设定基准轴的名称X、Y、Z、U、V、W、A、B、C4002drcax补偿轴指定误差补偿补偿轴的地址1.螺距误差补偿时,设定与4001 cmpax相同的轴名称2.相对位置补偿时,设定要补偿轴的名称X、Y、Z、U、V、W、A、B、C4003rdvno参考点分割点号设定参考点的补偿号,参考点是实际的基准点,因此该点⽆补偿号,设定号以1递增4101-51244004mdvno最负侧分割点号设定最负侧的补偿号4101-51244005pdvno最正侧分割点号设定最正侧的补偿号4101-51244006sc补偿⽐例系数设定补偿⽐例系数0-994007spcdy分割间隔设定基本轴的补偿间距1-9999999第2轴第3轴第4轴第5轴说明4011402140314041设定各轴补偿参数,第1轴的参数号为4001⾄4007,最多可控制4个轴,但作为相对位置补偿,可设定第5轴401240224032404240134023403340434014402440344044401540254035404540164026403640464017402740374047参数号项⽬说明设定范围4101.. . 5124设定各轴的补偿值-128 ~ 128实际补偿值由设定值乘以补偿⽐例系数参数号项⽬说明设定范围2011G0back G0反向间隙设定快速或⼿动反向间隙补偿-9999999~9999999mm 2012G1back G1反向间隙设定进给速度反向间隙补偿-9999999~9999999mm。
丝杆间隙补偿
丝杆间隙是指丝杆与母杆之间的间隔距离,是影响加工中心精度和稳定性的重要因素。
补偿丝杆间隙可以提高加工精度和稳定性,主要涉及以下几种方法:
1. 反向间隙补偿:滚珠丝杠副存在反向间隙,虽然间隙不大,但在高速运动状态下,会对运动精度造成影响。
因此,数控系统需要提供间隙补偿功能。
随着机器运转,磨损增加会导致运动副间隙增大,进而导致反向间隙逐渐增大。
因此,需要定期测量和补偿数控机床各坐标轴的反向间隙。
2. 螺距误差补偿:由于加工条件和加工精度的不同,丝杠可能存在螺距误差。
对于数控机床,螺距误差补偿可以有效提高其定位精度。
早期螺距误差的补偿方法主要是采用人工补偿控制,这种方法难实施、容易出错且效率低。
激光干涉仪可以准确地测量被测物的位置精度和定位精度且不受移动距离的限制,因此在螺距测量与补偿中应用广泛。
3. 热误差补偿:热误差是由于温度变化引起的机床各部分的热变形。
在加工过程中,热误差可以导致工件加工精度下降。
因此,需要采取措施对热误差进行补偿。
4. 丝杆间隙补偿参数的计算和调整:通过计算丝杆间隙补偿参数,如补偿量、系数等,可以有效地降低加工误差和提高加工质量。
在加工中心使用过程中,
需要根据不同零件的加工要求,合理设置丝杆间隙补偿参数,以达到最佳的加工效果和加工质量。
综上所述,丝杆间隙补偿是一个复杂的过程,涉及到多种方法的综合运用。
在实际操作中,需要根据具体情况选择合适的方法进行补偿,以达到提高加工精度和稳定性的目的。
840D系统补偿功能汇总数控机床的的几何精度,定位精度一方面受到机械加工母机的精度限制,另一方面更受到机床的材料和机械安装工艺的限制,往往不能够达到设计精度要求。
而要在以上诸多方面来提高数控机床的几何精度,定位精度需要投入大量的人力物力。
在机械很难提高精度的情况下,通过数控电气补偿能够使数控机床达到设计精度。
一、反向间隙补偿机床反向间隙误差是指由于机床传动链中机械间隙的存在,机床执行件在运动过程中,从正向运动变为反向运动时,执行件的运动量与目标值存在的误差,最后反映为叠加至工件上的加工精度。
机床反向间隙是机床传动链中各传动单元的间隙综合,如电机与联轴器的间隙,齿轮箱中齿轮间隙,齿轮与齿条间隙,滚珠丝杠螺母副与机床运动部件贴合面的间隙等等。
反向间隙直接影响到数控机床的定位精度和重复定位精度。
在半闭环下,由伺服电机编码器作为位置环反馈信号。
机械间隙无法由编码器检测到,在机械调整到最佳状态下需要进行反向间隙补偿。
在全闭环下,直线轴一般采用光栅尺作为位置环反馈信号,旋转轴一般采用外接编码器或圆光栅作为位置环反馈信号。
由于是直接检测运动部件的实际位移,理论上讲全闭环下无反向间隙。
但是由于光栅尺或圆光栅本身精度的限制和安装工艺的限制等等,使得全闭环下也具有“反向间隙”,这在激光干涉仪下能很明显看出来,一般在0.01mm左右。
西门子840D数控系统反向间隙补偿的方法如下:测得反向间隙值后在轴机床数据输入反向差值,单位为mm。
MD32450 BACKLASH [0]MD32450 BACKLASH [1]其中[0]为半闭环,[1]为全闭环。
输入后按下Reset键,回参考点后补偿生效。
可以在诊断→服务显示→轴调整→绝对补偿值测量系统中看到补偿效果。
反向间隙补偿能够在较大程度上提高数控机床的定位精度、重复定位精度,但是它的值是固定的,不能适用于机床的整个行程,这就需要另一种电气补偿手段,螺距误差补偿。
两者结合能使数控机床达到较高的定位精度和重复定位精度。
螺距误差补偿及反向间隙补偿根据下表设置螺距误差补偿相关参数:参数号参数位设定值设置说明3620 XZ 100200每个轴的参考点的螺距误差补偿点号3621 XZ 负方向最远的补偿位置号根据下面的公式进行计算:参考点的补偿位置号—(负方向的机床行程/补偿位置间隔)+ 1 100-(1000/50)+1=81 所以负方向补偿位置号设置为813622 XZ 正方向的最远补偿位置号根据下面的公式进行计算:参考点的补偿位置号+(正方向的机床行程/补偿位置间隔)+ 1 100+(0/50)+1=101 所以参考点正方向补偿位置号为101.3624 补偿点间隔输入格式为无小数点输入格式,由于X轴为直径值编程,所以X轴补偿点间隔应为实际补偿点间隔的2倍,应设置为100000,为100mm.参数号参数位设定值设置说明1800 #4(RBK) 是否分别进行切削进给/快速移动反向间隙补偿0: 不进行。
1: 进行。
1851 XZ 每个轴的反向间隙补偿量,设置后,回零生效1852 XZ 每个轴的快速移动时的反向间隙补偿量,回零生效由于FANUC系统螺距误差补偿采用增量式的补偿方式,所以在进行螺距误差补偿时,需根据补偿数据进行补偿数据的设定个。
下表为螺距误差补偿表由于每个补偿点的最大补偿值只能到7,在上表中可以看到,在-400mm测量位置处出现了一次22的值,此点是所有补偿点误差的最大值,所以补偿倍率按此点进行计算,而且考虑其它点的误差值,将补偿倍率设置为3倍。
补偿倍率设置为3倍,所有的补偿值都放大了三倍,所以在补偿数据处看到的是计算值的1/3,如果测量人员给出的是补偿值,那么补偿数据就按上图中的数据进行输入,如果给出的是误差值,则需将上图中的补偿数据取反。
螺距误差补偿在回零后即可生效。
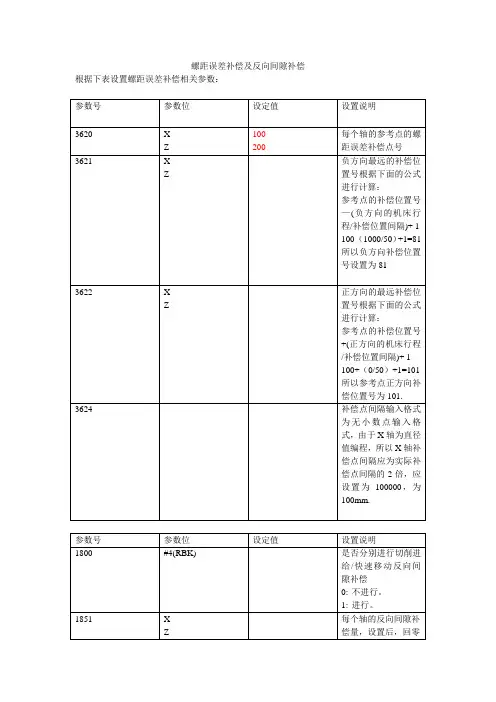
丝杠补偿一般指丝杠的螺距误差补偿.
间隙补偿包括所有传动链中的间隙(包括丝杆螺母付)的补偿.
由于丝杆螺距的不均匀性,传动链正,反向运动的间隙,都会直接影响数控精度,有些通改进运动付的结构,例如采用滚珠丝杆,使之正反向间隙得以消除,但螺距误差是避免不了的.所以必须进行补偿,以求较高的精度.同样,齿轮啮合需要间隙才能正常运行,这种累计间隙误差也需要通过补偿,才能提高
控制精度.
丝杆(丝杠)反向间隙又称丝杠背隙、丝杠间隙、丝杠失动量
在数控机床的进给传动链中.齿轮传动、滚珠丝杠:螺母副等均存在反向间隙,这种厦向间隙的存在会造成机床丁作台反向运动时,伺服电动机空转而工作台实际不运动。
对于采用半闭环伺服系统的数控机球.反向问隙的存在会影响到机床的定位精度和重复定位精度,从而影响到产品的加工精度这就需要数挫系统提供反向间隙补偿功能,以便在加工过程中自动补偿一些有规律的误差,提高加工零件的精度。
并且随着数控机床使用时删的增长,反向间隙还会因磨损造成的运动副间隙的增大而逐渐增加,因此需定期对数控机床各坐标轴的反向问隙进行测定和补偿。
1.反向间隙补偿过程
在数控系统无补偿的条件下,于机床测量行程范围内,在靠近行程的中点及两端的三个位置上分别进行多次测量,用千分表或百分表测量m各日标点位置P的平均反向间隙B.以所得平均值中的最大值为反向隙值B,并输人到数控系统反向间
隙补偿参数中。
CNC系统在控制坐标轴反向运动时,自动先让该标轴反向运动,然后再按指令进行运动.即数控系统会控制伺服电动机多走一段距离,这段距离等等于反向间隙值
B.从而补偿反向间隙。
需要指出的是这种方法只适合于半闭环数控系统.对于全闭环数控系统则不能采
取以上补偿办法。
2.反向间隙补偿方法
可使用激光干涉仪和百分表/千分表
百分表/千分表方法:
用手脉发生器移动相关轴,(将手脉倍率定为1×100的挡位,即每变化一步,电机进给0.1mm),配合百分表观察相关轴的运动情况。
在单向运动精度保持正常后作为起始点的正向运动,手脉每变化一步,机床该轴运动的实际距离
d=d1=d2=d3…=0.1mm,说明电机运行良好,定位精度良好。
而返回机床实际运动位移的变化上,可以分为四个阶段:①机床运动距离d1>d=0.1mm(斜率大于
1);②表现出为d=0.1mm>d2>d3(斜率小于1);③机床机构实际未移动,表现出最标准的反向间隙;④机床运动距离与手脉给定值相等(斜率等于1),恢复到机床的
正常运动。
注:
在不同的速度下测得的反向间隙不同,一般低速的反向间隙值要比高速的反向间隙值大,特别是在机床轴负荷较大,运动阻力较大时。
所以有的数控系统就提供了高速G00和低速G01两个补偿值。
数控机床间隙测量及补偿。