第五章 车载以太网【车载网络及信息技术】
- 格式:ppt
- 大小:2.54 MB
- 文档页数:87

汽车技术:车载网络技术#懂车玩家超级创作日(第四期)#智能网联汽车主要包括3种网络:以车内总线通信为基础的车内网络,也称为车载网络;以短距离无线通信为基础的车载自组织网络;以远距离通信为基础的车载移动互联网络。
因此,智能网联汽车是融合车载网、车载自组织网和车载移动互联网的一体化网络系统。
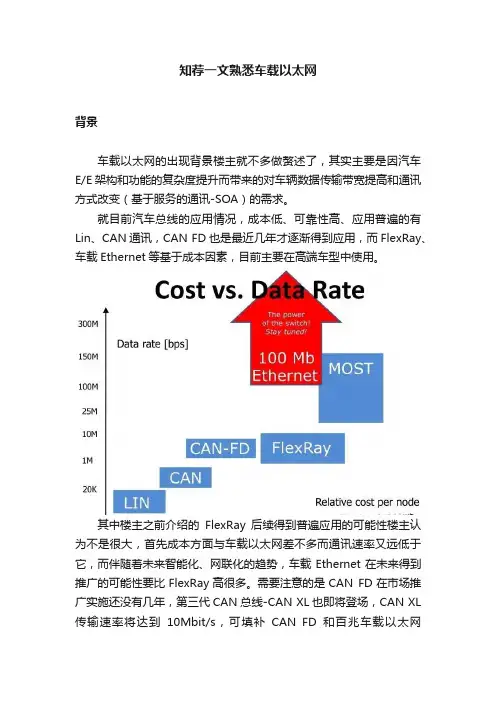
智能网联汽车网络体系构成车载网络是基于CAN、LIN、FlexRay、MOST、以太网等总线技术建立的标准化整车网络,实现车内各电器、电子单元间的状态信息和控制信号在车内网上的传输,使车辆具有状态感知、故障诊断和智能控制等功能。
车载自组织网络是基于短距离无线通信技术自主构建的V2V、V2I、V2P之间的无线通信网络,实现V2V、V2I、V2P之间的信息传输,使车辆具有行驶环境感知、危险辨识、智能控制等功能,并能够实现V2V、V2I之间的协同控制。
车载移动互联网络是基于远距离通信技术构建的车辆与互联网之间连接的网络,实现车辆信息与各种服务信息在车载移动互联网上的传输,使智能网联汽车用户能够开展商务办公、信息娱乐服务等。
车载网络车载网络划分为5种类型,分别为A类低速网络、B类中速网络、C类高速网络、D类多媒体网络和E类安全应用网络。
A类低速网络传输速率一般小于10kbit/s,有多种通信协议,该类网络的主流协议是LIN(局域互联网络),主要用于电动门窗、电动座椅、车内照明系统和车外照明系统等。
B类中速网络传输速率在10~125kbit/s之间,对实时性要求不太高,主要面向独立模块之间数据共享的中速网络。
该类网络的主流协议是低速CAN(控制器局域网络),主要用于故障诊断、空调、仪表显示等。
C类高速网络传输速率在125~1000kbit/s之间,对实时性要求高,主要面向高速、实时闭环控制的多路传输网。
该类网络的主流协议是高速CAN、FlexRay等协议,主要用于牵引力控制、发动机控制、ABS、ASR、ESP、悬架控制等。
车载以太网技术基础解析1 以太网常见缩略词汇总1)1TPCE = One (1) Twisted Pair 100 Megabit (C = century = 100) Ethernet1对双绞线 100M以太网2)RTPGE= Reduced Twisted Pair Gigabit Ethernet简化版双绞线千兆以太网3)GEPOF = Gigabit Ethernet Over Plastic Optical Fiber基于塑料光纤的千兆以太网4)100BASE-T1 = 100 Megabit Baseband One Pair100M以太网(1对双绞线)5)1000BASE-T1 = 1 Gigabit Baseband One Pair1000M以太网(1对双绞线)6)1000BASE-RH = Gigabit Ethernet Over Plastic Optical Fiber基于塑料光纤的千兆以太网7)OPEN / OPEN Alliance = One Pair Ethernet Network Alliance单对以太网网络联盟8)OABR = (OPEN Alliance) BroadR-Reach100BASE-T1的早期名称,当时IEEE没有参与,开放联盟将Broadcom的BroadR-Reach技术引入汽车领域;9)TSN = Time Sensitive Network时间敏感网络10)AVB = Audio/Video Bridging音视频桥接技术2 初步了解 100BASE - T1100BASE-T1 是在现有的以太网技术基础上进行的整合。
1)IEEE 100BASE-TX——双单工通讯—— MLT-3(多级传输)- >125Msps(百万抽样/秒)65~80MHz带宽)——两对双绞线——无纠错编码——DSP中没有回音和串扰消除技术——决策反馈均衡(DFE)图1. 双单工通信(两对双绞线)2)IEEE 1000BASE-T——全双工通讯——4D-PAM5 - >125Msps(百万抽样/秒)65~80MHz带宽)——四对双绞线——部分响应传输滤波器——纠错编码的附加级别——DSP中有回音和串扰消除技术——决策反馈均衡(DFE)图2. 全双工通信(四对双绞线)3)IEEE 100BASE-T1——全双工通讯——PAM3 - 66.7Msps(百万抽样/秒)27MHz带宽——单对双绞线——回音消除技术——决策反馈均衡(DFE)图3. 全双工通信(单对双绞线)3 以太网VS传统总线3.1 交换机式网络通信图4:CAN总线与以太网通信方式对比1)传统总线上所有节点都连接到同一个传输媒介中;例如一条CAN总线上就可以挂多个终端节点(ECU),同时该CAN总线上的电信号还会影响到挂在此总线上的所有终端节点,我们一般会把CAN 称为CAN Bus 或 CAN Network。

车载以太网讲解及降噪方法一、车载以太网定义车载以太网是一种连接车内电子单元的新型局域网技术,在单对非屏蔽双绞线上可实现100 Mbit/s 甚至1 Gbit/s 的数据传输速率,同时满足汽车行业高可靠性、低电磁辐射、低功耗、带宽分配、低延迟以及同步实时性等方面的要求。
常用的以太网和车载以太网主要是在物理层不同,基本架构依然是MAC+PHY芯片+传输链路。
主要有100M和1G两种标准。
对于100M车载以太网在PHY层主要有两个规范:BroadR-Reach和100Base-T1,两者都是明确为汽车应用设计的,并且它们之间有很多重叠。
而1000Base-T1这是千兆车载以太网的物理层技术标准。
100Base-T1最显著的特点就是使用单对差分线实现数据传输,从成本上来说降低了线束的成本和重量。
办公用以太网采用了100Base-TX或1000Base-T标准,而用于汽车的以太网则规定使用100Base-T1或1000Base-T1标准。
二、车载以太网标准车载以太网标准化主要由IEEE802.3 和IEEE802.1 工作组、AUTOSAR 联盟、OPEN 联盟及AVnu 联盟起到主要的推动作用,标准化汇总如下表:三、车载以太网应用车载以太网被定义为下一代车载局域网络技术,短期内无法全部取代现有车载网络。
依据车载以太网在汽车网络上的应用过程,大致可分为3个阶段:局部网络阶段、子网络阶段、多子网络阶段。
局部网络阶段:可单独在某个子系统上应用车载以太网技术,实现子系统功能,如基于DoIP 协议的OBD 诊断、使用IP 协议的摄像头等;子网络阶段:可将某几个子系统进行整合,构建车载以太网子系统,实现各子系统的功能,如基于AVB 协议的多媒体娱乐及显示系统、ADAS 系统等;多子网络阶段:将多个子网络进行整合,车载以太网作为车载骨干网,集成动力、底盘、车身、娱乐等整车各个域的功能,形成整车级车载以太网络架构,实现车载以太网在车载局域网络上的全面应用车载作为支持ADAS的设备,各种传感器和摄像头已被逐渐配置于汽车中。


车载以太网技术随着汽车电子的日益复杂化、联网化和宽带化,车载以太网顺应此发展趋势在车内具有广阔的发展空间。
本文对车载以太网技术,包括其起源、定义、发展趋势、主要技术以及其标准化的概况进行了全面的分析和介绍。
1.引言以太网作为一种局域网(LAN)技术自1973年发明以来,已经历40多年的发展历程,成为当前应用最为普遍的局域网技术。
以太网主要由IEEE 802.3工作组负责标准化,以太网从最初支持10Mbit/s的吞吐量开始,经过不断的发展,支持快速以太网(100Mbit/s)、千兆以太网(1Gbit/s)、万兆以太网(10Gbit/s)及100Gbit/s。
同时,为了适应应用的多样化,以太网速率打破了以10倍为一级来提升的惯例,开始支持2.5、5、25及400Gbit/s的速率。
以太网技术不仅支持双绞线的铜线传输介质,也支持光纤传输。
随着城域以太网论坛(MEF)不断将以太网技术作为交换技术和传输技术广泛应用于城域网建设,以太网已经不仅仅局限于局域网应用,可以更广泛地应用到城域网(MAN)和广域网(WAN)的领域。
在进入汽车领域之前,以太网已经获得了广泛的应用,同时还具有技术成熟、高度标准化、带宽高以及低成本等优势。
随着近年来汽车电子化的快速发展,车内电子产品数量逐年增加,复杂性日益提高。
以太网所具有的技术优势可以很好地满足汽车制造商对车内互联网络的需求。
但由于车内电磁兼容的严格要求,以太网直到近些年才取得了技术突破从而得以应用到汽车内。
目前,主流的车载以太网的技术标准是基于博通公司的BroadR-Reach(BRR)技术,IEEE已经完成对100Mbit/s车载以太网技术的标准化,正在对1Gbit/s传输速度的车载以太网进行标准化。
车载以太网在车内将主要应用在对带宽需求较高的系统上(见图1),如高级驾驶辅助系统(ADAS)、车载诊断系统(OBD)以及车载信息娱乐系统等。
与传统的车载网络不同,车载以太网可以提供带宽密集型应用所需的更高数据传输能力,未来其将在车内具有广泛的应用前景。