第五章 车载以太网
- 格式:ppt
- 大小:2.53 MB
- 文档页数:5
车载以太网技术基础解析1 以太网常见缩略词汇总1)1TPCE = One (1) Twisted Pair 100 Megabit (C = century = 100) Ethernet1对双绞线 100M以太网2)RTPGE= Reduced Twisted Pair Gigabit Ethernet简化版双绞线千兆以太网3)GEPOF = Gigabit Ethernet Over Plastic Optical Fiber基于塑料光纤的千兆以太网4)100BASE-T1 = 100 Megabit Baseband One Pair100M以太网(1对双绞线)5)1000BASE-T1 = 1 Gigabit Baseband One Pair1000M以太网(1对双绞线)6)1000BASE-RH = Gigabit Ethernet Over Plastic Optical Fiber基于塑料光纤的千兆以太网7)OPEN / OPEN Alliance = One Pair Ethernet Network Alliance单对以太网网络联盟8)OABR = (OPEN Alliance) BroadR-Reach100BASE-T1的早期名称,当时IEEE没有参与,开放联盟将Broadcom的BroadR-Reach技术引入汽车领域;9)TSN = Time Sensitive Network时间敏感网络10)AVB = Audio/Video Bridging音视频桥接技术2 初步了解 100BASE - T1100BASE-T1 是在现有的以太网技术基础上进行的整合。
1)IEEE 100BASE-TX——双单工通讯—— MLT-3(多级传输)- >125Msps(百万抽样/秒)65~80MHz带宽)——两对双绞线——无纠错编码——DSP中没有回音和串扰消除技术——决策反馈均衡(DFE)图1. 双单工通信(两对双绞线)2)IEEE 1000BASE-T——全双工通讯——4D-PAM5 - >125Msps(百万抽样/秒)65~80MHz带宽)——四对双绞线——部分响应传输滤波器——纠错编码的附加级别——DSP中有回音和串扰消除技术——决策反馈均衡(DFE)图2. 全双工通信(四对双绞线)3)IEEE 100BASE-T1——全双工通讯——PAM3 - 66.7Msps(百万抽样/秒)27MHz带宽——单对双绞线——回音消除技术——决策反馈均衡(DFE)图3. 全双工通信(单对双绞线)3 以太网VS传统总线3.1 交换机式网络通信图4:CAN总线与以太网通信方式对比1)传统总线上所有节点都连接到同一个传输媒介中;例如一条CAN总线上就可以挂多个终端节点(ECU),同时该CAN总线上的电信号还会影响到挂在此总线上的所有终端节点,我们一般会把CAN 称为CAN Bus 或 CAN Network。
车载以太网讲解及降噪方法一、车载以太网定义车载以太网是一种连接车内电子单元的新型局域网技术,在单对非屏蔽双绞线上可实现100 Mbit/s 甚至1 Gbit/s 的数据传输速率,同时满足汽车行业高可靠性、低电磁辐射、低功耗、带宽分配、低延迟以及同步实时性等方面的要求。
常用的以太网和车载以太网主要是在物理层不同,基本架构依然是MAC+PHY芯片+传输链路。
主要有100M和1G两种标准。
对于100M车载以太网在PHY层主要有两个规范:BroadR-Reach和100Base-T1,两者都是明确为汽车应用设计的,并且它们之间有很多重叠。
而1000Base-T1这是千兆车载以太网的物理层技术标准。
100Base-T1最显著的特点就是使用单对差分线实现数据传输,从成本上来说降低了线束的成本和重量。
办公用以太网采用了100Base-TX或1000Base-T标准,而用于汽车的以太网则规定使用100Base-T1或1000Base-T1标准。
二、车载以太网标准车载以太网标准化主要由IEEE802.3 和IEEE802.1 工作组、AUTOSAR 联盟、OPEN 联盟及AVnu 联盟起到主要的推动作用,标准化汇总如下表:三、车载以太网应用车载以太网被定义为下一代车载局域网络技术,短期内无法全部取代现有车载网络。
依据车载以太网在汽车网络上的应用过程,大致可分为3个阶段:局部网络阶段、子网络阶段、多子网络阶段。
局部网络阶段:可单独在某个子系统上应用车载以太网技术,实现子系统功能,如基于DoIP 协议的OBD 诊断、使用IP 协议的摄像头等;子网络阶段:可将某几个子系统进行整合,构建车载以太网子系统,实现各子系统的功能,如基于AVB 协议的多媒体娱乐及显示系统、ADAS 系统等;多子网络阶段:将多个子网络进行整合,车载以太网作为车载骨干网,集成动力、底盘、车身、娱乐等整车各个域的功能,形成整车级车载以太网络架构,实现车载以太网在车载局域网络上的全面应用车载作为支持ADAS的设备,各种传感器和摄像头已被逐渐配置于汽车中。
车载以太网协议车载以太网协议(Ethernet in the Car)是一种用于车辆内部通信网络的协议标准,它基于以太网技术,旨在实现车内各种电子设备之间的高速数据传输和通信。
随着汽车智能化和互联网化的发展,车载以太网协议正逐渐成为汽车电子系统的重要组成部分。
一、车载以太网协议的发展历程。
车载以太网协议的发展始于对汽车电子系统通信速度和带宽需求的不断增加。
传统的汽车通信网络采用控制器局域网(CAN)或媒体车间通信(MOST)等总线结构,但随着汽车电子设备的增多和功能的复杂化,这些传统网络已经无法满足高速数据传输和大容量通信的需求。
因此,车载以太网协议应运而生,成为了一种更加适合车辆内部通信网络的协议标准。
二、车载以太网协议的特点。
1. 高速传输,车载以太网协议采用了千兆以太网技术,能够实现高速数据传输,满足汽车电子设备对于实时性和稳定性的要求。
2. 灵活扩展,车载以太网协议支持网络拓扑的灵活扩展,能够满足不同车型和不同功能模块的通信需求。
3. 统一标准,车载以太网协议采用了统一的协议标准,使得不同厂家生产的汽车电子设备能够实现互联互通,提高了整车系统的集成度和互操作性。
三、车载以太网协议的应用场景。
车载以太网协议广泛应用于汽车电子系统中,包括但不限于以下几个方面:1. 车载娱乐系统,车载娱乐系统包括音频、视频、导航等多媒体设备,这些设备需要高速数据传输和稳定通信,车载以太网协议能够满足其需求。
2. 驾驶辅助系统,包括自动驾驶、车道偏离预警、自适应巡航控制等系统,这些系统需要实时传输大量感知数据和控制指令,车载以太网协议能够提供高速、稳定的通信保障。
3. 车辆诊断与维护,车载以太网协议还可以用于车辆诊断与维护系统,实现对车辆各个部件的远程监测和故障诊断。
四、车载以太网协议的发展趋势。
随着汽车电子系统的不断发展和智能化水平的提高,车载以太网协议将会迎来更广阔的发展空间。
未来,车载以太网协议可能会在以下几个方面得到进一步的应用和发展:1. 支持更高速率,随着汽车电子设备对数据传输速率的需求不断增加,车载以太网协议可能会进一步提高传输速率,以满足更多高带宽应用的需求。
AVnu联盟白皮书--车载以太网及AVB技术应用概要随着消费者对汽车互联性和娱乐舒适性的需求呈爆炸式增长,汽车制造商非常有必要在车内构建一套标准、易于部署的A/V网络系统。
IEEE802.1音频/视频桥接(AVB)工作组与IEEE1722二层传输协议工作组,已经针对时间敏感数据开发了一系列的网络增强型功能,用于促进高可靠性的音频与视频应用。
AVnu联盟采纳了这些标准,并给出了车载应用的建议。
同时,联盟内部的汽车验证测试小组(Certification Test Subgroup,CDS)也开发了对应的认证测试规范。
本文大致描述了这些新技术内容以及它们在车载应用中的优势。
介绍过去的十年中,消费者的需求推动了汽车音视频功能的大幅度增长。
曾经只出现在豪华轿车中的功能,如DVD播放、倒车摄像头与导航等,如今也成为了许多主流汽车的标配。
越来越多的资源及选项,使得后座娱乐系统(Rear Seat Entertainment,RSE)变得越来越复杂。
面对如此多变的需求,如何构建一个通用的汽车网络架构成为需要迫切解决的问题。
当几乎全球的OEM都认为车辆通信带宽低、采取CAN网络构建车内网络时,车载多媒体的应用带来巨大挑战(如带宽、QoS、可扩展性、成本、规模经济、开放等)。
什么是可以同时满足技术、成本要求的多媒体应用解决方案呢,目前还有许多争论。
以前,由于不确定性大,车辆多媒体传输避免使用基于包交换式的网络。
如今IEEE802.1音频视频桥接(AVB)工作组与IEEE1722AVTP工作组为汽车内低时延、高可靠性传输需求提供了一种基于标准的实现方法。
AVB协议可被应用在多种物理层上,本篇文章将主要介绍以太网上的AVB应用。
车内线缆的简化及可靠的硬线解决方案,使得基于有线以太网的AVB 协议能够很好地应用于车载环境中。
AVnu联盟的主要市场目标是将AVB成功地应用于车内的音视频流中。
本白皮书概括了车内网络使用AVB技术的特点及优势。
为什么自动驾驶系统需要车载以太网自动驾驶汽车和先进驾驶辅助系统(ADAS)对更高带宽、更低延迟提出了更迫切的需求。
车载以太网已经成为搭建更高速汽车网络的新骨干。
对发射机、接收机、链路分段和高层协议功能进行的全面测试确保其得到成功实施。
什么是车载以太网?车载以太网是在汽车中连接电子元器件的一种有线网络。
其设计初衷是希望满足汽车行业对带宽、延迟、同步、干扰(例如电磁干扰(EMI))、安全性和网络管理等方面的要求。
车载以太网的概念最初是由 Broadcom 提出的,后来 OPEN(单对以太网)联盟采纳了这一标准并承担起管理职责。
OPEN 推广Broadcom 的100 Mbps BroadR-Reach 作为多供应商许可解决方案。
100 Mbps PHY 实施借鉴了 1 Gbps 以太网的技术,能够在一对线缆上实现 100 Mbps 双向传输。
此技术使用了更先进的编码方案,可以消除回声,将基本频率(从 125 MHz)降至 66 MHz。
这使得以太网能够达到汽车 EMI 技术指标。
IEEE 和 OPEN 联盟已在 IEEE 802.3 和 80在早期阶段,以太网从DLC 诊断端口到网关只有一条100Base-T1 1TPCE 链路,所以它只用于诊断和固化软件更新。
图 1 显示了车载以太网作为新骨干(使用更快速的千兆位以太网 1000Base-T1 RTPGE 链路)的角色演变。
尽管传统的汽车串行总线在各种汽车应用中发挥了重要作用,但它们也都有各自的缺点,而车载以太网能够克服这些缺点。
例如,大多数汽车串行总线都无法达到LIDAR 所要求的70 MB/s 数据速率。
当各种传感技术和无线通信技术整合在一起时,通常需要同时使用LIDAR、RADAR、摄像头和 V2X 通信。
在这种情况下,需要传输的数据量超过了传统汽车串行总线的现有容量。
因此,汽车行业想要引入车载以太网,以便使自动驾驶和先进 ADAS 系统变成现实。

车载以太网工具链一什么是车载以太网随着汽车电子的快速发展,车内ECU数量的持续增加,带宽需求也在随之不断增长。
并且,汽车制造商的电子系统、线束系统等成本也在提高。
而车载以太网相比于传统总线技术,不仅可以满足汽车制造商对带宽的需求,同时还能降低车内的网络成本,是未来整车网络架构设计的趋势。
目前,车载以太网主要用于诊断、车载信息娱乐系统(IVI)和驾驶辅助系统。
二车载以太网技术OSI(Open System Interconnection)七层网络模型定义了网络互联的七层框架,并且每一层都运行不同的协议,只有统一通信规范时,才能实现网络互联化。
车载以太网参考OSI分层结构,并规定了每一层的功能及协议。
车载以太网协议通常被认为是一个四层协议系统:应用层、传输层、网络层、数据链路层,每一层都具有不同的功能。
| 物理层(OABR)参照OSI模型,车载以太网在物理层,即第一、二层采用了博通公司的BroadR-Reach技术。
BroadR-Reach的物理层(PHY)技术由OPEN(一对以太网)联盟推动,因此有时也被称为OPEN联盟BroadR-Reach(OABR)。
BroadR-Reach由一对双绞线实现全双工通信,并提供100Mbit/s及更高的宽带性能。
该技术使用单对的非屏蔽双绞线进行通信,不仅可以减轻线缆重量达到30%,还可以降低80%连接成本,符合汽车要求的新型物理层技术。
BroadR-Reach技术已被IEEE标准化,并命名为100BASE-T1,其中T1是指车载以太网。
100BASE-TX100BASE-TX采用两对5类非屏蔽双绞线或1类屏蔽双绞线,一对用于发送数据,另一对用于接收数据,长度上限为100米。
100BASE-T1100BASE-T1也叫IEEE802.3bw,它是被IEEE针对百兆车载以太网而定义的标准。
与传统的百兆以太网(100BASE-TX)不同,100BASE-T1使用的是一对双绞线进行全双工的信息传输。
AVnu联盟白皮书--车载以太网及AVB技术应用概要随着消费者对汽车互联性和娱乐舒适性的需求呈爆炸式增长,汽车制造商非常有必要在车内构建一套标准、易于部署的A/V网络系统。
IEEE802.1音频/视频桥接(AVB)工作组与IEEE1722二层传输协议工作组,已经针对时间敏感数据开发了一系列的网络增强型功能,用于促进高可靠性的音频与视频应用。
AVnu联盟采纳了这些标准,并给出了车载应用的建议。
同时,联盟内部的汽车验证测试小组(Certification Test Subgroup,CDS)也开发了对应的认证测试规范。
本文大致描述了这些新技术内容以及它们在车载应用中的优势。
介绍过去的十年中,消费者的需求推动了汽车音视频功能的大幅度增长。
曾经只出现在豪华轿车中的功能,如DVD播放、倒车摄像头与导航等,如今也成为了许多主流汽车的标配。
越来越多的资源及选项,使得后座娱乐系统(Rear Seat Entertainment,RSE)变得越来越复杂。
面对如此多变的需求,如何构建一个通用的汽车网络架构成为需要迫切解决的问题。
当几乎全球的OEM都认为车辆通信带宽低、采取CAN网络构建车内网络时,车载多媒体的应用带来巨大挑战(如带宽、QoS、可扩展性、成本、规模经济、开放等)。
什么是可以同时满足技术、成本要求的多媒体应用解决方案呢,目前还有许多争论。
以前,由于不确定性大,车辆多媒体传输避免使用基于包交换式的网络。
如今IEEE802.1音频视频桥接(AVB)工作组与IEEE1722AVTP工作组为汽车内低时延、高可靠性传输需求提供了一种基于标准的实现方法。
AVB协议可被应用在多种物理层上,本篇文章将主要介绍以太网上的AVB应用。
车内线缆的简化及可靠的硬线解决方案,使得基于有线以太网的AVB 协议能够很好地应用于车载环境中。
AVnu联盟的主要市场目标是将AVB成功地应用于车内的音视频流中。
本白皮书概括了车内网络使用AVB技术的特点及优势。

Rolf ErnstInstitut für Datentechnik und KommunikationsnetzeETFA, Berlin, Sep 7, 2016Automotive Ethernet –Opportunities and PitfallsINSTITUT FÜR DATENTECHNIK UND KOMMUNIKATIONS-high resolution redundant image sensors for autonomous drivingcommunication using switched high speed network source: VOLVO7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 5▪bandwidth, bandwidth, bandwidth▪for novel functions with high data rates, such as ADAS or infotainment ▪speed growing with technology 100Mb/s –1Gb/s -10Gb/s -...▪open network capabilities▪open automotive networks towards IP protocol with approved technology ▪shared technology cost▪standard with high volume across industries▪no headaches with next generation MOST, FlexRay, ...▪huge engineering platform experience▪avionics, industry, ...The Ethernet promisebut: how to efficiently design with Ethernet?how to reach the required safety?▪straightforward support of publisher-subscriber mechanism ▪several application specific standards, CAN, FlexRay, LIN, …▪< 100kbit … 10Mbit (FlexRay, CAN FD) data rate▪predictable scheduling: fixed priority or TDMA or slotted ring (MOST)▪routing by dedicated gateway (GW)▪low speed allows SW implementation Where we come from: Bus-based communication ECU ECU ECU GWMSG #ID received by all nodes on bussender is not aware of receiversECU ECU7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 7▪switched network instead of bus▪point-to-point connections with dynamic address handling▪different scheduling mechanisms, flow control▪note: original Ethernet bus technology not suitable▪different communication schemes▪unicast, multicast, broadcast▪different identifier assignment▪not primarily developed for time-critical communication▪complex multi-level protocol alternatives▪many configuration parameters▪higher overhead than CAN▪consequence for network properties and design?Ethernet is different▪all traffic through bidirectional links –fastest electrial solution ▪all arbitration in the switches –flexible scheduling▪arbitrary network topology –adaptable performance & redundancySwitched Network –High Flexibilityswitch switchterminalnode switch switch terminalnode terminal nodeterminalnodecombined unitlink switched network networkinterfacesource: Electronic Design Dec 13, 2011Ethernet IEEE 802.1Q–Standardization▪Standard Ethernet(IEEE 802.1Q)▪priority based▪up to 8 priorities and 4096 VLANs▪static priority scheduling▪Ethernet AVB (IEEE 802.1Qav)▪originally defined for streaming applications▪adds standardized traffic shaping to IEEE 802.1Q▪802.1AS: clock synchronization▪Time-Sensitive Networking –TSN▪set of (draft) Ethernet standards addressing real-time requirements7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 11TSN Arbitration and Shaping▪frame preemption (IEEE 802.1Qbu)▪reduce blocking time by lower-priority fames▪allow preemption of lower-priority frames (at certain points)▪ingress filtering (IEEE 802.1Qci)▪ensure that traffic streams stay within predefined bounds (fault containm.)▪timing and synchronization(IEEE 802.1ASbt)▪extensions to802.1AS: redundancy, multiple time domains▪time triggering(IEEE 802.1Qbv)▪time aware shaper for low latency, time sensitive traffic▪more shapers: peristaltic, burst limited, ...▪worst case timing analysis available for most standardized features (pyCPA, SymTA/S) –see talk by Thiele et al. session T3.1flow control7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 13Ethernet socket adaptersource. 7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 15WC response time analysis using SymTA/S (pyCPA)for control messagestopology →control streams are NOT pipelined in any topology→no overwriting in Ingress transmit buffersperiods →camera stream packets are pipelined→buffers for frames in switches needed!Topology and bandwidth effects -Conclusion▪high priority control traffic (class A)▪no risk of message overwriting in transmit buffers▪if sufficient switch buffer available and message density low ▪holds for all investigated topologies in example▪high priority camera traffic (class B)▪risk of overwriting in transmit buffer –stream buffering needed ▪holds for all investigated topologies▪Ethernet AVB scheduling appears sufficient▪no shaper for class A7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 23Overview▪automotive networks –the Ethernet promise▪Ethernet as a backbone -a closer look▪Ethernet –the safety perspective▪conclusionCAN7.9.2016 | R. Ernst, “Automotive Ethernet –7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 27▪isolation▪how well does Ethernet isolate critical from other traffic?▪…freedom from interference“▪delivery under transmission errors▪what timing guarantees are possible under errors?▪fail operational▪how well can network failures be compensated?Ethernet –The safety perspectiveEthernet generally supports similar techniques▪priority assignment according to traffic class▪combine with shaping where needed (AVB or TSN) ▪supports combination of design styles▪other techniques: TSN time triggering (cp. FlexRay)general trafficClass A Class B othertime criticallesstime criticalcamera trafficless ‐than worst ‐case designworst ‐case designbut: is the isolation effective?7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 29Isolation –The switch mattersswitchswitchterminal nodeswitchswitch terminal nodeterminal node terminal nodecombined unitlinkswitched networknetwork interfaceEthernet switch structure•parse the pac ket s •lookup output ports •send to output queue•configure switch •assign frame buffer memory•update forwarding tablememoryswitch fabricIngress stage store&forwards c h e d u l e rs c h e d u l e rEgress stage s w i t c h i n p u t l i n k ss w i t c h o u t p u t l i n k spacket handlingswitch managementSWHW acc.program&data forwarding table queueing buffersHW7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 31▪forwarding table▪limited index space leads to indexing conflicts ▪loss of timing, interference▪requires appropriate MAC address management▪queueing buffers▪limited buffer space ▪message drop, interference▪flow control▪same priority blocking, increased delay&buffer ▪few queues -few priorities▪head-of-line-blocking, interference ▪queueing effects require system level end-to-end analysisSwitching interference challengesprogram&data forwarding table queueing bufferss c h e d u l e r▪forwarding resolved via indexingEthernet switch –address mappingdestination address space(globally assigned)index calculation (hashing)forwarding port (map)≥ 24827-210alternative table entries (set associative)index value space table lookupforwarding table entriesdestination address supplier AOEM BSwitchedEthernetswitch∙gateway SW stack7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 357.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 37Frame grouping -Triggering and interference▪buffer timeout (AUTOSAR)▪frame is sent periodically ▪no frame interference▪buffer full event (AUTOSAR)▪frame transmitted if buffer full ▪interference▪trigger frames (AUTOSAR)▪certain CAN IDs immediately release frame ▪interference▪per-frame timeout▪send upon single frame timeoutframe groupingUDP/IP frameCANframe group transmit bufferEthernet frame packaging(e.g. SOME/IP)trigger ▪numerous sources of interference▪switch operation, prioritization, frame grouping, triggering ▪no standardized solutions▪partly based on non-disclosed parameters▪careful evaluation and design required▪don‘t rely on standards only!Interference in automotive Ethernet –Conclusion(link, tail-drop, ...)congestion: 5 additional terminals send to RX 1024 bytes every 0.5ms[Lim 2011] 7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 43explicit flow configuration preconfiguration SDN architecture example topologyprotocols (proposed)speed grade config frame sizeReq/ACK sizeOverview▪automotive networks –the Ethernet promise▪Ethernet as a backbone -a closer look▪Ethernet –the safety perspective▪conclusion7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 47Ethernet standard development–Some comments▪many new features introduced in TSN▪addressing interests from many industries: industrial, automotive, media ▪some additions seem to be redundant compared to802.1Qav(AVB)▪peristaltic and burst limited shapers(worst WCRT-cp. Thiele)▪for automotive applications▪min. end-to-end latency typically> 1..2 ms▪feasible with AVB -or w. additional preemption▪clock synchronization already in AVB (802.1AS)▪additions increase protocol and circuit complexity▪increases switch, terminal and network assurance effort▪increases switch costbe selective with new standard features!Design complexity and cost revisited-The cost-of-ownership trap▪many more parameters and variants than in current networks▪MAC address management, switch management, protocol selection, packaging, ...▪new standards in TSN even increase feature set▪current software standardarization does not limit variety▪nor does TSN▪unified automotive solutions needed▪different solutions and incompatibilities increase design process costs, tool costs, ...▪cost of variety management at all levels generates new costs-of-ownership for automotive industry7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 49Conclusion▪Ethernet is a viable basis for automatic driving▪adaptable bandwidth and latency, supports integration▪predictability for hard real-time systems▪flexible end-to-end control for transient errors▪extensions for resilient and secure networks w. fast reconfiguration▪many traps require highly systematic approach for risk mitigation ▪high-level standards needed for integration▪solutions to individual problems, such as scheduling, are not sufficient ▪research should address effective and efficient mechanisms for▪mitigating and bounding interference on all levels (not only time)▪providing analysis for end-to-end timing (worst case)▪predictable dynamic network control, such as SDN7.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 51▪Literature[Lim2011]H.-T. Lim, K. Weckemann, and D. Herrscher, “Performance study of an in-car switchedethernet network without prioritization,” in Proc. of international conference onCommunication technologies for vehicles. Berlin, Heidelberg: Springer-Verlag, 2011, pp. 165–175. [Online]. Available: /citation.cfm?id=1987310.1987328[Thiele14] Thiele, Daniel, et al. "Improving formal timing analysis of switched Ethernet byexploiting traffic stream correlations." Proceedings of the 2014 International Conference on Hardware/Software Codesign and System Synthesis. ACM, 2014.[Axer 2014] Axer, Philip, Daniel Thiele, and Rolf Ernst. "Formal timing analysis of automatic repeatrequest for switched real-time networks." Industrial Embedded Systems (SIES), 2014 9th IEEE International Symposium on. IEEE, 2014.[TB2002] A. Tanenbaum, Computer Networks, 4th ed. Prentice Hall Professional TechnicalReference, 2002.▪Acknowledgements▪some of the slide contents have been provided by Daniel Thiele, Robin Hofmann, and Philip AxerReferencesThank you!Farben der TU BraunschweigR 255G 205B 0R 190G 30B 60R 255G 220B 77R 255G 230B 127R 255G 240B 178R 255G 245B 204R 250G 110B 0R 252G 154B 77R 252G 182B 127R 253G 211B 178R 254G 226B 204R 176G 0B 70R 192G 51B 107R 215G 127B 162R 235G 191B 209R 243G 217B 227R 124G 205B 230R 164G 220B 238R 189G 230B 242R 215G 240B 247R 229G 245B 250R 0G 128B 180R 77G 166B 203R 140G 198B 221R 191G 223B 236R 217G 236B 244R 0G 83B 116R 64G 126B 151R 140G 177B 192R 191G 212B 220R 217G 229B 234R 198G 238B 0R 215G 243B 77R 226G 246B 127R 238G 250B 178R 244G 252B 204R 137G 164B 0R 173G 191B 77R 196G 209B 127R 219G 228B 178R 231G 237B 204R 0G 113B 86R 77G 156B 137R 140G 191B 179R 191G 219B 213R 218G 234B 231R 204G 0B 153R 222G 89B 189R 235G 153B 214R 245G 204B 235R 250G 229B 245R 118G 0B 118R 152G 64B 152R 186G 127B 186R 214G 178B 214R 235G 217B 235R 118G 0B 84R 156G 77B 136R 193G 140B 178R 221G 191B 212R 235G 217B 230R 8G 8B 8R 95G 95B 95R 150G 150B 150R 192G 192B 192R 221G 221B 2217.9.2016 | R. Ernst, “Automotive Ethernet –Opportunities and Pitfalls”| Page 53switchswitchterminal nodeswitchswitch terminal nodeterminal nodeterminal nodeARQARQ。

11实验案例连接方式2.1双通道作为监控和数据采集器,采集两个设备间的通信数据(Bypass 功能)本产品可以捕获到DUT1和DUT2之间的通信报文,也可以模拟节点,向DUT1和DUT2发送报文。
同时,也可以实现多个主设备和多个从设备之间的数据交换。
可以通过监控软件查看各主节点通信数据。
2.2 试验搭建gPTP 时钟桥案例车载以太网TSN 试验网络旨在构建精确时间同步和模拟车辆内部控制器模块进行网络精确授时而需要的必要网络架构。
其需要祖时钟(grand clock )节点一个,从时钟(slave clock )节点可以是1个或多个,车载以太网TSN 交换机一台,配置电脑一台。
其中,祖时钟和从时钟节点使用Linux 电脑(网卡需支持IEEE1588)和车载以太网转换器配套来模拟实现, 当然每台电脑和转换器组合可以使用实际的激光雷达或其他从时钟节点来对应更换。
系统架构如下:Linux PCNetwork Support IEEE1588Linux PCNetwork SupportIEEE1588Linux PCNetwork SupportIEEE1588Linux PCNetwork SupportIEEE1588Linux PCNetwork SupportIEEE15882.2 汽车激光雷达gPTP 时钟桥案例如下搭建一种简化的激光雷达桥接方案,支持gPTP 时间同步,并实现主控模块和激光雷达的数据传输和精确同步。
2.3 汽车激光雷达进入工控机方案如下搭建一种简化的激光雷达接入工控机的方案,支持gPTP 时间同步,并实现工控机和激光雷达的数据传输和精确同步。
方案类似的其他应用也可以参考本方案,如AVB 节点组网,音响音频布置方案,车载高清摄像头,毫米波雷达,工业机器人,航电系统时钟同步等等。
工控机(Grand Master)2简要使用说明及指示灯说明SW2000TSN以太网交换机为例子的某一个通道的TRX-N和TRX-P两根线与被测试目标对应连接在一起,再根据需要配置端口的模式为Master或Slave. (如果接的目标设备是Master,则该端口设置为Slave,反之亦然.)。
FRONTIER DISCUSSION | 前沿探讨车载以太网DoIP技术研究张政上汽通用汽车有限公司 上海市 201206摘 要: 随着汽车智能化和网联化的不断发展,车辆对数据传输带宽的需求越来越高,因此车载以太网应运而生。
本文介绍了车载以太网的特点及其应用过程,着重研究了车载以太网的DoIP诊断通信技术,剖析了DoIP技术对传输层、网络层、数据链路层和物理层这四个网络层级的需求以及DoIP数据的结构。
关键词:车载以太网 DoIP技术 网络层级1 引言随着汽车智能化和网联化的不断发展,汽车高级驾驶辅助系统(ADAS)、高性能车载娱乐系统、车联网系统及云服务等新技术已在车辆上应用,使得车辆上的软件变得越来越复杂,传统的车载CAN总线通信速率最大仅1Mbit/s,显然无法满足新技术对车辆数据传输带宽的需求。
从而急需一种高带宽、开放性好、兼容性强、可靠性高、同时又满足车载严格法规要求的车载网络,因此,一种新型网络车载以太网应运而生。
车载以太网是一种通过有线网络去连接车内的各电子控制单元 (ECU)的局域网技术,与普通民用以太网的四对非屏蔽双绞线不同,车载以太网可以用一对非屏蔽双绞线实现100Mbit/ s甚至1000Mbit/s的数据传输速率,同时能够满足其他性能方面的要求。
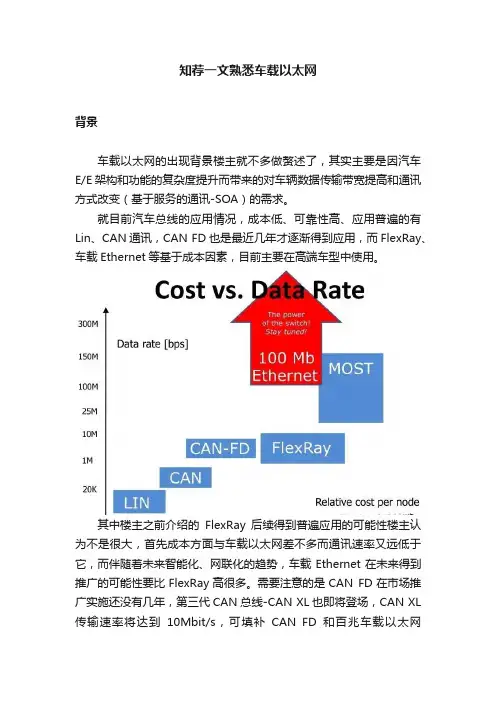
2 车载以太网技术应用目前常用车载网络技术有:控制器局域网络(CAN)、本地互连网络(LIN)、汽车内部网络通讯协议(FlexRay)、面向媒体的系统传输(MOST)等。
其中LIN总线是一种低成本串行总线,最大通信速率为20kb/s。
CAN总线主要用于车辆控制数据传输,目前应用最广泛,最大通信速率为1Mb/s,但LIN和CAN 的带宽都太低,并不适用于ADAS 等技术的应用。
FlexRay具有通信速率较高、实时性好、容错性强等优点,其通信速率最大为10Mbit/s,主要用于线控系统。
MOST是专门为汽车多媒体系统而开发的网络,其最大通信速率为150Mbit/s,但只用一种环形拓扑结构,应用范围受限。