2011控制工程基础答案及评分标准
- 格式:doc
- 大小:339.50 KB
- 文档页数:6
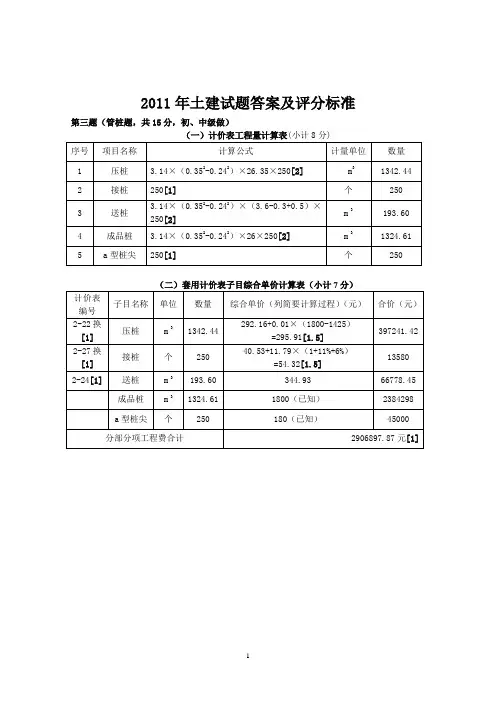
2011年土建试题答案及评分标准第三题(管桩题,共15分,初、中级做)(二)套用计价表子目综合单价计算表(小计7分)第四题(共35分,初、中、高级均做)(一)分部分项清单工程量计算表(小计11分)(二)分部分项工程量清单(小计4分)说明:清单综合单价在给分时,当综合单价=计价表合计/清单工程数量时得分。
计价表工程数量在给分时,当清单工程量与计价表工程量一致时得分。
(四)工程造价计价程序表(小计16分)评分说明:对于专业工程暂估价,可能有认为为门窗不属于墙体项目,不应列出的考虑.因此对于其他项目费中专业工程暂估价为0的答案同样给分。
第五题(钢筋题,共30分,中、高级做)评分说明,对于钢筋根数计算公式正确但结果不正确的得一半分。
1号筋:8@200 底筋长度:4500mm A-B轴线距离根数:(2400 1-2轴线距离-125*2梁宽-100起步距离)/200+1=12根2号筋8@200 负筋受力筋长度:2400 1-2轴线距离-125梁宽+0.6l ab+15d端支座锚固长度+800延伸长度+100-15板厚弯钩=3448mm根数:(4500A-B轴线距离-125*2梁宽-100起步距离)/150+1=29根C 6@200 分布筋1长度:4500 A-B轴线距离根数:(2400 1-2轴线距离-250梁宽)/200=11根C 6@200 分布筋2长度:4500 A-B轴线距离根数:(800延伸长度-125梁宽)/200=4根3号筋8@200 端支座负筋长度:1200延伸长度-125梁宽+0.6l ab+15d端支座锚固长度+100-15板厚弯钩=1448mm根数:[(2400 1-2轴线距离-125*2梁宽-100起步距离)/200+1]*2=24根C 6@200 分布筋用2号筋代替,不计4号筋8@200 支座负筋长度:1200延伸长度-125梁宽+0.6l ab+15d端支座锚固长度+100-15板厚弯钩=1448mm根数:[(3600 2-3轴线距离-125*2梁宽-100起步距离)/200+1]*2=36根C 6@200 分布筋长度:3600mm 2-3轴线距离根数:(1200-125梁宽)/200*2=12根5号筋8@200 底筋长度:4500mm A-B轴线距离根数:(3600 2-3轴线距离-125*2梁宽-100起步距离)/200+1=18根6号筋8@150 支座负筋长度:1000+800延伸长度+(100-15)*2板厚弯钩=1970mm根数:(4500 A-B轴线距离-125*2梁宽-100起步距离)/150+1=29根C 6@200 分布筋1长度:4500 A-B轴线距离根数:(1000-125梁宽)/200=5根C 6@200 分布筋2长度:4500 A-B轴线距离根数:(800-125梁宽)/200=4根7号筋8@200 底筋长度:4500mm A-B轴线距离根数:(2600 3-4轴线距离-125*2梁宽-100起步距离)/200+1=13根8号筋8@200 支座负筋长度:1200延伸长度+-125梁宽+0.6l ab+15d端支座锚固长度+100-15板厚弯钩=1448mm根数:[(2600 3-4轴线距离-125*2梁宽-100起步距离)/200+1] *2=26根C 6@200 分布筋长度:2600mm 3-4轴线距离-m根数:【(1200-125)/200】*2=12根9号筋8@150 支座负筋长度:800延伸长度-125梁宽+0.6l ab+15d+端支座锚固长度+100-15板厚弯钩=1048mm根数:(4500 A-B轴线距离-125*2梁宽-100起步距离)/150+1=29根C 6@200 分布筋长度:4500 A-B轴线距离mm根数:(800-125梁宽)/200=4根10号筋8@200 底筋长度:2400+3600+2600=8600mm 1-4轴线距离根数:(4500 A-B轴线距离-125*2梁宽-100起步距离)/200+1=22根第六题(共40分,中、高级做)(一)计价表工程量计算表(小计33分)(二)套用计价表子目综合单价计算表(小计7分)。
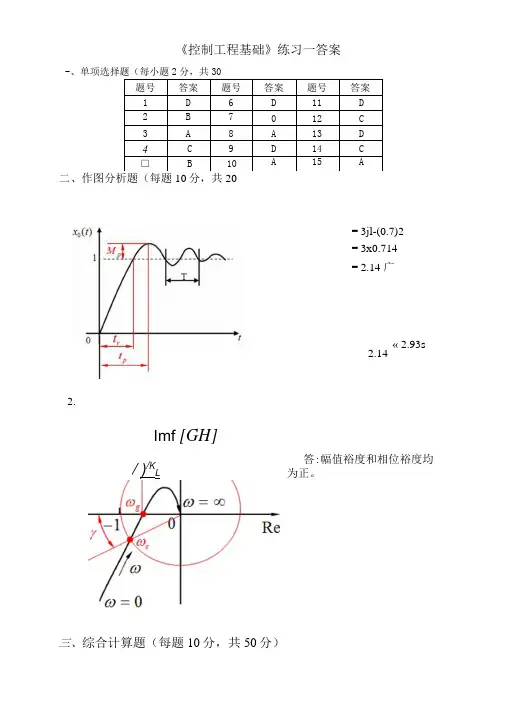
《控制工程基础》练习一答案-、单项选择题(每小题2分,共30题号答案题号1D6 2B7 3A8 4C9□B10答案题号答案D11D 012C A13D D14C A15A二、作图分析题(每题10分,共20= 3jl-(0.7)2= 3x0.714= 2.14 广2.14« 2.93s 2.Imf [GH]/)/K L答:幅值裕度和相位裕度均为正。
三、综合计算题(每题10分,共50分)10010101、解: 由题意可写出Gg(s) = -------------- = ------------------ ,s(s + 10) + k 10s+ 100 根据二阶系统的标准形式可知:气2 = ] 00,2初=10 .・. co n = 10,S = 0.5:.M = e xlOO% = 16.4%,/ = ----------------- f= 0.363s,八=-^― — 0.8s「 1口〃"2、解:由题意得系统的开环频率特性为:G"问)=, k /以,2口 + 1)(,0.5切+1) A (69) = —/ 七 ,(p(co )= -90° - tg 10.569- tg 12a )6A/1+467 71 + 0.256?当口=使时,(p^co*) = -90° -tg~l0.5绥,一鬼一'2绥=-180° => 饱=14/、 10 10zy )= ___ = 4 g « J1+4.2 J1+0.25 绥 2 V5A /L25・・・《(dB) = 201g-^- = 201g :=-UdB g *(饱) 4o3、解:由题意得G R (S ) = ---- ---- =—-—,其频率特性为2s + 15 + 5 2s + 20 A 例=/5 = -5 =,伊(口)= _侦_\ 2L,7(2^y)2+ 202VW+40010由输入信号可知,X,. = 20=2*.(口) = 45°,根据频率响应的特点,有 x o (O = x o (69)sin[6/ + ^(69)] = A (69)匚K sin[2? +(p(cd) +(p {(69)]52=/ 、x 2 sin[2, + (Tg—I 二)+ 45°] = 0.49 sin(2f + 33.69°) V4X22+4001。
《控制工程基础》教学大纲课程类别:专业教育课程课程名称:控制工程基础开课单位:机械工程学院课程编号:B03020302总学时:40 学分: 2.5适用专业:机械电子工程先修课程:高等数学、线性代数、大学物理、电工技术、电子技术基础一、课程在教学计划中地位和作用控制工程基础是机械电子工程专业的一门专业基础课程,也是后续专业课程的基础。
该课程主要是运用控制论的基本原理及基本思想方法,分析研究机械和机电工程中有关信息的传递、反馈及控制,研究机械和机电系统的动态特性,培养学生以动态的观点去看待机械系统。
要求学生掌握系统时频域建模及性能分析的相关知识,掌握系统稳定判定的方法,熟悉系统校正的方法。
培养学生具有初步设计、分析和校正系统的能力,培养学生应用控制工程基础理论知识并使用MATLAB软件分析、研究、解决复杂工程问题的能力。
为学生从事相关专业技术工作和科学研究工作提供必要的理论知识支撑。
二、课程目标1.通过本课程的学习,培养学生能利用控制系统的基本原理表述与解决工程问题,建立学生能在创建系统数学模型的基础上,对系统的性能进行分析、研究的能力;(支撑毕业要求1、2、4)2.能利用系统频率特性的基本知识,对系统进行辨识,培养学生掌握解决工程问题的程序与方法;(支撑毕业要求1、2)3.能够利用系统稳定的条件判断系统系统是否稳定,并能对不稳定的系统进行校正,培养学生能用理论知识进行工程问题规划与设计,适时体现创新意识;(支撑毕业要求1、2、3)4.能够有效利用MATLAB软件对控制工程实际问题进行模拟、分析与预测。
(支撑毕业要求5)三、课程内容及基本要求第一章绪论(2学时)1.熟悉控制系统得基本工作原理;2.了解控制系统的分类,熟练掌握控制系统的反馈工作原理及反馈控制系统基本构成;3.了解控制理论的研究对象及方法;4.理解控制系统的最基本要求。
第二章拉普拉氏变换(2学时)1.了解拉氏变换与拉氏反变换的定义;2.掌握典型时间函数的拉氏变换和拉氏变换定理;3.熟练掌握拉氏反变换的数学方法。
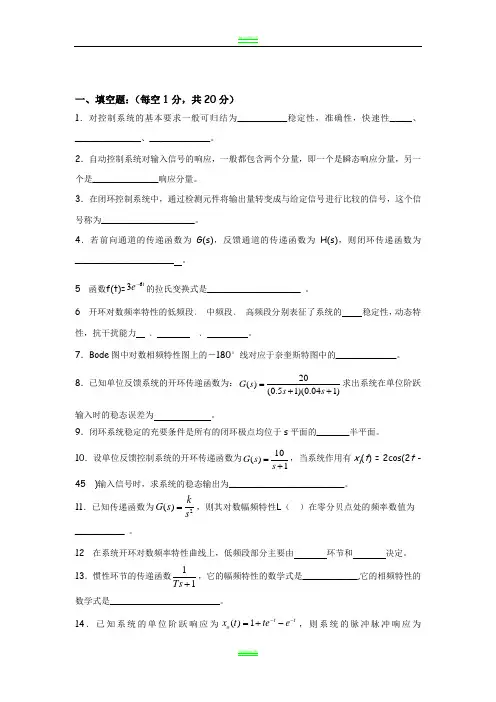
一、填空题:(每空1分,共20分)1.对控制系统的基本要求一般可归结为_________稳定性,准确性,快速性____、____________、___________。
2.自动控制系统对输入信号的响应,一般都包含两个分量,即一个是瞬态响应分量,另一个是____________响应分量。
3.在闭环控制系统中,通过检测元件将输出量转变成与给定信号进行比较的信号,这个信号称为_________________。
4.若前向通道的传递函数为G(s),反馈通道的传递函数为H(s),则闭环传递函数为__________________ 。
5 函数f(t)=t e 63-的拉氏变换式是_________________ 。
6 开环对数频率特性的低频段﹑ 中频段﹑ 高频段分别表征了系统的 稳定性,动态特性,抗干扰能力 ﹑ ﹑ 。
7.Bode 图中对数相频特性图上的-180°线对应于奈奎斯特图中的___________。
8.已知单位反馈系统的开环传递函数为:20()(0.51)(0.041)G s s s =++求出系统在单位阶跃输入时的稳态误差为 。
9.闭环系统稳定的充要条件是所有的闭环极点均位于s 平面的______半平面。
10.设单位反馈控制系统的开环传递函数为10()1G s s =+,当系统作用有x i (t ) = 2cos(2t - 45)输入信号时,求系统的稳态输出为_____________________。
11.已知传递函数为2()k G s s=,则其对数幅频特性L ()在零分贝点处的频率数值为_________ 。
12 在系统开环对数频率特性曲线上,低频段部分主要由 环节和 决定。
13.惯性环节的传递函数11+Ts ,它的幅频特性的数学式是__________,它的相频特性的数学式是____________________。
14.已知系统的单位阶跃响应为()1t t o x t te e --=+-,则系统的脉冲脉冲响应为__________。
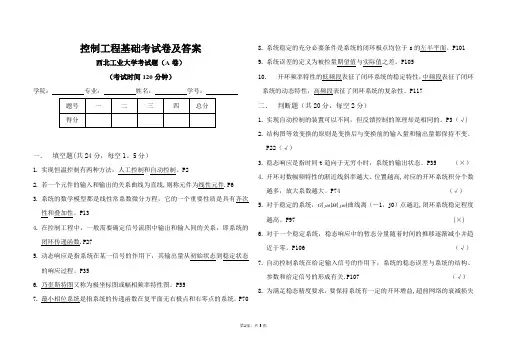
控制工程基础考试卷及答案西北工业大学考试题(A卷)(考试时间120分钟)学院:专业:姓名:学号:一.填空题(共24分,每空1。
5分)1.实现恒温控制有两种方法:人工控制和自动控制。
P22.若一个元件的输入和输出的关系曲线为直线,则称元件为线性元件.P63.系统的数学模型都是线性常系数微分方程,它的一个重要性质是具有齐次性和叠加性。
P134.在控制工程中,一般需要确定信号流图中输出和输入间的关系,即系统的闭环传递函数.P275.动态响应是指系统在某一信号的作用下,其输出量从初始状态到稳定状态的响应过程。
P356.乃奎斯特图又称为极坐标图或幅相频率特性图。
P557.最小相位系统是指系统的传递函数在复平面无右极点和右零点的系统。
P70 8.系统稳定的充分必要条件是系统的闭环极点均位于s的左半平面。
P1019.系统误差的定义为被控量期望值与实际值之差。
P10510.开环频率特性的低频段表征了闭环系统的稳定特性,中频段表征了闭环系统的动态特性,高频段表征了闭环系统的复杂性。
P117二.判断题(共20分,每空2分)1.实现自动控制的装置可以不同,但反馈控制的原理却是相同的。
P3(√)2.结构图等效变换的原则是变换后与变换前的输入量和输出量都保持不变。
P22(√)3.稳态响应是指时间t趋向于无穷小时,系统的输出状态。
P35 (×)4.开环对数幅频特性的渐近线斜率越大、位置越高,对应的开环系统积分个数越多,放大系数越大。
P74 (√)5.对于稳定的系统,()()ωωjHjG曲线离(—1,j0)点越近,闭环系统稳定程度越高。
P97 (×) 6.对于一个稳定系统,稳态响应中的暂态分量随着时间的推移逐渐减小并趋近于零。
P106 (√)7.自动控制系统在给定输入信号的作用下,系统的稳态误差与系统的结构、参数和给定信号的形成有关.P107 (√)8.为满足稳态精度要求,要保持系统有一定的开环增益,超前网络的衰减损失就必须用减小放大器的增益来补偿。
2011年监理工程师三控真题(试题)全面解析前言《全国监理工程师执业资格考试轻松过关》丛书注自2011年问世以来,以其与众不同的高效、实用、精辟、独到,令许多读者在2011年度监理工程师考试中轻松地高分过关!读者纷纷来信致谢,对本系列丛书给予高度评价,以下仅略举一二。
考生陈某在来信中说:“《轻松过关》使我顺利通过了今年的监理工程师考试,四门一次性过关!以前,我考了4年一直没找到好的学习方法,今年幸亏找到您编写的这套书,圆了我的梦”。
考生张某来信说:“通过复习您的书让我各科都考了高分,在此向您献上真诚的感谢!我已把您的书推荐给了几个同事,都得到了一致的好评。
”考生李某来信感慨:“《轻松过关》使我受益匪浅,让我少走很多弯路,相见恨晚,感到很幸运手里有这套书”。
现提供2011年监理工程师执业资格考试案例分析试题解析,以飨读者。
需要说明的是,若有任何网站或其他媒介转载本文,必须全文转载(包括前言),否则,将追究侵权责任。
《轻松过关》丛书作者:马凯之注:该套丛书已于2012年初载誉重印。
《2012年全国监理工程师执业资格考试轻松过关》全套六本,涵盖了监理工程师执业资格考试所有考试科目和考点,中国建筑工业出版社出版,作者:马凯之。
更多真题详见//u/26602637372011年监理工程师三控真题(试题)及解析1.质量是指“一组固有特性满足要求的程度”,其中:“要求”是指()的需要和期望。
A.供方和需方B.组织和个人C.明示和隐含D.一般和特殊【解析】满足要求就是应满足明示的(如合同、规范、标准、技术、文件、图纸中明确规定的)、通常隐含的(如组织的惯例、一般习惯)或必须履行(如法律、法规、行业规则)的需要和期望。
与要求相比,满足要求的程度才反映为质量的好坏。
【答案】C2.任何建筑产品在适用、耐久、安全、可靠、经济以及与环境的协调等方面都必须满足基本要求,但不同专业的工程,其环境条件、技术经济条件的差异使其质量特征有不同的()。
1,墙体维护材料要求:导热系数小,热容量大的材料。
2,材料在冲击或震动荷载作用下,能吸收较大的能量,产生一定的变形而不破坏的性质,称为韧性或冲击韧性。
本题选韧性那一个选项。
3,硅酸盐水泥加入石膏的作用,我选水泥凝固时间。
4,混凝土受压破坏,我选脆性破坏(因为没有听说过类脆性破坏这玩意,考虑再三还是选了脆性破坏)。
5,砂土的粗细程度,我选细度模数。
6,钢筋冷弯,我选塑性变形能力。
7,木材加工使用前,干燥至平衡含水率8,计算和绘图用的基准面:大地水准面。
9,1:2000地形图采用:我选6度带高斯坐标系(怀疑中)看了前面的讨论,应该是3度。
10,竖盘指标差,我选1/2(L+R-360)11,求方位角αbc=?,αab=45度35分00秒,∠ABC=125度22分30秒,αbc=350度57分30秒。
12,求中误差,m=√([▽▽]/n)。
————本题那本参考书上有标准答案,呵呵13,我选的是3年,我的二注就是三年一注册的,朋友的一注好像也是三年,但看楼上的写了有规定,也搞不清楚了。
《房地产基本制度与政策》教材第80页中,注册结构工程师注册有效期2年。
14,环境影响报告书,征求建设项目:所在地环境保护行政主管部门的意见。
15,《建筑工程勘察设计管理条例》应该是属于行政法规,我好像选了行业法规。
16,我选了法定代理,不知道对不对。
17,验槽验什么:探明地下古墓、孤石等情况。
18,不是很厚,但大面积或大长度混凝土浇注方法,我选分段分层浇注。
19,单层厂房分件吊装说法正确的,我选为后续工作提供工作面。
20,横道图与网络计划区别选D 表达方式直观。
21,求流水节拍,正确答案应该是7天。
((55-6)/(5+3-1)=7),我蒙了7天。
22,不是承载力极限破坏的一项:我选裂缝。
23,斜压,剪压,斜拉破坏需要力的大小顺序,我选1大于2大于3(怀疑中)。
24塑性内力重分布有关概念,我选弯矩调幅系数那个。
25,承受和传递水平力构件,是柱间支撑(这个考的是厂房,承受水平荷载是由柱间支撑和水平支撑组成一个桁架体系,将水平力化为竖向拉力传到基础)。

2011年造价工程师考试计价与控制真题及答案一、单项选择题(共72题,每题1分)1、关于我国现行建设项目投资构成的说法中,正确的是()。
A、生产性建设项目总投资为建设投资和建设期利息之和B、工程造价为工程费用、工程建设其他费用和预备费之和C、固定资产投资为建设投资和建设期利息之和D、工程费用为直接费、间接费、利润和税金之和2、用成本计算估价法计算国产非标准设备原价时,需要考虑的费用项目是()。
A、特殊设备安全监督检查费B、供销部门手续费C、成品损失费及运输包装费D、外购配套件费3、某进口设备通过海洋运输,到岸价为972万元,国际运费88万元,海上运输危险费率3‰,则离岸价为()万元。
A、881.08B、883.74C、1063.18D、1091.904、根据我国现行建筑安装工程费用构成的相关规定,下列费用中,属于安装工程费用的是()。
A、设备基础、工作台的砌筑工程费或金属结构工程费用B、房屋建筑工程供水、供暖等设备费用C、对系统设备进行系统联运无负荷运转工作的调试费D、对整个生产线负荷联合试运转所发生的费用5、根据《建筑工程安全防护、文明施工措施费用及使用管理规定》(建办[2005]89号),下列措施项目中,应列入文明施工与环境保护项目的是()。
A、现场防火B、现场办公生活设施C、施工现场临时用电接地保护装置D、高空作业防护6、关于建筑安装工程费中材料费的说法,正确的是()A、材料费包括原材料、辅助材料、构配件、零件、半成品、周转材料的费用B、材料消耗量是指形成工程实体的净用量C、材料检验试验费不包括对构件做破坏性试验的费用D、材料费等于材料消耗量与材料基价的乘积7、关于建筑安装工程费用中税金的说法中,正确的是()A、税金是指按国家税法规定应计入建筑安装工程费用的营业税B、当安装的设备价值作为安装工程产值时,计税营业额中应扣除所安装设备的价款C、总承包方的计税营业额中不包括付给分包方的价款D、当预算定额中含有未计价主材时,计税营业额中应不包括此类未计价主材费用8、关于土地征用及迁移补偿费的说法中,正确的是()A、征用林地、牧地的土地补偿费标准为该地被征用前三年,平均年产值的6~10倍B、征收无收益的土地,不予补偿C、地上附着物及青苗补偿费归农村集体所有D、被征用耕地的安置补助费最高不超过被征用前三年平均年产值的30倍9、根据我国现行规定,关于预备费的说法中,正确的是()。
2011年二级建造师考试《建筑工程》考试真题一、单项选择题(共20题,每题1分。
每题的备选项中,只有1个最符合题意)1.影响钢筋混凝土梁斜截面破坏形式的因素中,影响相对较大的因素是( )。
A.截面尺寸B.混凝土强度等级C.配箍率D.弯起钢筋含量2.建筑物高度相同、面积相等时,耗热量比值最小的平面形式是( )。
A.正方形B.长方形C.圆形D.1型3.关于建筑石膏技术性质的说法,错误的是( )。
A.凝结硬化快B.硬化时体积微膨胀C.硬化后空隙率高D.防火性能差4.水泥强度等级根据胶砂法测定水泥( )的抗压强度和抗折强度来判定。
A.3d和7dB.3d和28dC.7d和14dD.7d和28d5.水准测量中,A点为后视点,B点为前视点,A点高程为ha,后视读数为a,前视读数为b,则B点高程( )。
A.ha-a+bB.ha+a-bC.a+b-haD.a-b-ha6.最适合泵送的混凝土坍落度是( )。
A.20mmB.50mmC.80mmD.100mm7.立面铺贴防水卷材适应采用( )。
A.空铺法B.点粘法C.条粘法D.满粘法8.根据相关规范,门窗工程中不需要进行性能复测的项目是( )。
A.人造木门窗复验氨的含量B.外墙塑料窗复验抗风压性能C.外墙金属窗复验雨水渗漏性能D.外墙金属窗复验复验空气渗透性能9.关于建筑幕墙防雷构造要求的说法,错误的是( )。
A.幕墙的铝合金立柱采用柔性导线连通上、下柱B.幕墙立柱预埋件用圆钢或扁钢与主体结构的均压环焊接连通C.幕墙压顶板与主体结构屋顶的防雷系统有效连接D.在有镀膜层的构件上进行防雷连接应保护好所有的镀膜层10.厕浴间蒸压加气混凝土砌块200mm高度范围内应做( )坎台。
A.混凝土B.普通透水墙C.多孔砖D.混凝土小型空心砌块11.脚手架定期检查的主要项目不包括( )。
A.杆件的设置和连接是否符合要求B.立杆的沉降和垂直度C.地基是否有积水,底座是否松动D.安装的红色警示灯12.关于外用电梯安全控制的说法,正确的是( )。
控制工程基础吴华春答案08A27.场景(四)某水利枢纽工程可行性研究报告已批复。
该工程主坝为混凝土重力坝,坝基为X级岩石,石方爆破开挖采用电力引爆。
主坝坝基采用固结灌浆和帷幕灌浆。
坝体廊道混凝土强度等级为C25,抗渗等级为W10。
上下游围堰为过水围堰。
本工程下游围堰堰顶高程计算公式为:Hd=hd+ha+δ,其安全超高δ取()m。
[单选题] *A.0(正确答案)B.0.3C.0.4D.0.509A4.某水电工程坐落在河谷狭窄、两岸地形陡峻、山岩坚实的山区河段,设计采用全段围堰法导流,此工程宜采用()导流。
[单选题] *A.束窄河床B.明渠C.涵管D.隧洞(正确答案)09B24.抛投块料截流按不同的抛投合龙方法分为() *A.塞堵B.平堵(正确答案)C.盖堵D.立堵(正确答案)E.混合堵(正确答案)10A4导流设计流量是指在导流时段内按导流标准选择相应洪水重现期的()流量。
[单选题] *A.平均B.设计C.校核D.最大(正确答案)10A19.某2级水闸工程采用土围堰挡水施工,根据《水利水电工程施工组织设计规范》,其围堰边坡稳定最小安全系数为()。
[单选题] *A.1.0B.1.05(正确答案)C.1.1D.1.1510B22.水利水电工程截流龙口宽度主要根据( )确定。
*A.截流延续时间B.龙口护底措施C.龙口裹头措施D.截流流量(正确答案)E.龙口抗冲流速(正确答案)11A20.根据《水利水电工程施工组织设计规范》(SL303-2004),4级土围堰的边坡稳定安全系数应不小于( )。
[单选题] *A.1.0B.1.05(正确答案)C.1.1D.1.212A5.某工程采用不过水土石围堰,基坑上游围堰挡水位为30m,下游围堰挡水位为29.4m,上下游水位差为0.6m,波浪爬高为0.5m,安全超高为1.0m,该工程上游围堰堰顶高程至少应为()。
[单选题] *A.31.0mB.31.5m(正确答案)C.31.6mD.32.1m2012上B23.水利工程施工导流设计的任务包括()等。
2011监理工程师《三控》试卷及答案(1)一、单项选择题(共80 题,每题1 分。
每题的备选项中,只有1 个最符合题意)1.建设工程质量特性中,“满足使用目的的各种性能”称为工程的()。
2011年乌海市造价工程师考试:报名时间A.适用性B.可靠性C.耐久性D.目的性2.监理工程师在工程质量控制中,应遵循质量第一、预防为主、坚持质量标准、()的原则。
A.以人为核心B.提高质量效益C.质量进度并重D.减少质量损失3.我国建设工程质量监督管理的具体实施者是()。
A.建设行政主管部门B.工程质量监督机构C.监理单位D.建设单位4.建设工程质量保修书应由()出具。
A.建设单位向建设行政主管部门B.建设单位向用户C.承包单位向建设单位D.承包单位向监理单位2011监理工程师《三控》试卷及答案(2)11.承包单位提出的技术修改要求,经相关各方同意后还须经()批准才实施。
2011年乌海市造价工程师考试:报名时间A.设计代表B.承包单位技术负责人C.总监理工程师D.专业监理工程师12.工所需原材料、半成品或构配件,经()审查并确认其合格后方准进场用。
A.施工单位技术负责人B.施工项目经理C.监理工程师D.施工项目技术负责人13.理工程师对施工现场计量作业的控制中,主要是检查()。
A.操作人员资格B.操作方法C.施工设备状况D.记录方式14.理工程师发现施工现场有不合格的构配件时,应()。
A.下达《工程暂停令》B.责令不得用于工程重要部位C.责令做出标识,限期清除出场D.责令限期修补合格后备用2011监理工程师《三控》试卷及答案(3)21.在制定检验批的抽样方案时,为合理分配生产方和使用方的风险,主控项目对应于合格质量水平的a 和b 值均不宜超过()。
A.5%B.6%C.8%D.10%22.建筑工程施工质量验收中,经返工重做或更换器具、设备的检验批,应()。
A.予以验收B.重新进行验收C.鉴定验收D.协商验收23.工程质量事故处理方案的类型有返工处理、不做处理和()。
2011年监理工程师考试三项控制真题及答案发表时间:2012年3月22日15:47:26 【中大网校:考试全知道】2012年监理工程师网络辅导火爆招生!为了帮助考生系统的复习2012年监理工程师考试课程,全面的了解注册监理工程师考试教材的相关重点,小编特编辑汇总了2012年注册监理工程师考试辅导资料,希望对您参加本次考试有所帮助!一、单项选择题(共80题,每题1分。
每题的备选项中;只有1个最符合题意)第1题质量是指“一组固有特性满足要求的程度”,其中,“要求”是指()的需要和期望。
A.供方和需方B.组织和个人C.明示和隐含D.一般和特殊【正确答案】:C第2题任何建筑产品在适用、耐久、安全、可靠、经济以及与环境协调性方面都必须达到基本要求。
但不同专业的工程,其环境条件、技术经济条件的差异使其质量特点有不同的()。
A.侧重面B.选择范围C.内在界限D.内在关系【正确答案】:A第3题加强隐蔽工程质量验收和监督管理,是基于工程质量具有()的特点而提出的要求。
A.影响因素多B.波动大2012年监理工程师考试用书C.终检局限性D.评价方法特殊性【正确答案】:C第4题选择合适的承包单位是工程质量管理的重要环节,工程承发包管理属于()的管理职能。
A.业主B.政府C.监理单位D.施工单位【正确答案】:B第5题某工程勘察设计企业已具有市政公用工程行业的桥梁、隧道工程甲级勘察设计资质。
该企业还可承担()的勘察设计业务。
A.全国范围所有工程B.企业所在地区工程C.建筑行业所有工程D.公路、铁道行业桥梁、隧道工程2012年监理工程师报名时间【正确答案】:D第6题在设计展开阶段,监理工程师进行质量控制的工作内容之一是()。
A.优选设计单位B.编制设计大纲C.参与主要材料、设备选型D.提供设计基础资料【正确答案】:C第7题对初步设计阶段的无法明确或具体解决的重大技术问题,应通过()的阶段,以满足设计质量的要求。
A.扩初设计B.技术设计C.施工图设计D.方案设计【正确答案】:B第8题按施工层次划分工程质量控制的系统过程时,最基本的控制对象是()。
学年度第一学期期末考试《控制工程基础》(八)卷专业班级姓名学号一、单选题(每题的备选答案中只有一个♦佳答案,每题2分,共30分)1.一阶系统的单位阶跃响应的动态过程为:()A.振荡衰减,最后趋于终值B.按指数规律趋于终值C.直线上升D.直线下降2.采样系统稳定的充分必要条件是()A,系统的闭环极点PK都分布在Z平面的单位圆圆周上B.系统的闭环极点PK都分布在Z平面的圆内部C.系统的闭环极点PK部分布在Z平面的圆外部D.系统的闭环极点PK都分布在Z平面的实轴上3.3变化时G(j3)的红向量端点轨迹曲线称为()。
A,幅频特性曲线B,极强标图C.对数坐标图 D.相频特性曲线4.Bode图的横坐标当频率ω每变化(〉倍,其间隔距离为1个单位长度,表示Ig3?的值改变量为1。
A.2B.20C.1D.105.系统闭环特征方程为D(三)=s'3+2s^2+3s+6≈0,则系统()Λ.稳定 B.单位阶跃响应曲线为单调指数上升C.临界桎定D.右半平面闭环极点数为26.闭环发数极点与负实轴的夹角B反映了系统的()。
A.峰值时间B.超调量C.上升时间D.调节时间7.当系统中存在更数开环零点时,需要计算根轨迹的().A.终止角B.分离角C.会合角D.起始角8.从控制理论的发展来看可以分成三个阶段,其中第•阶段是():A.现代控制理论B.经典控制理论C.大数据理论S智能控制理论9.根轨迹是系统所有()的轨迹曲线。
A.闭环零点B,闭环极点C.开环零点开环极点10.从自动控制的观点看,家用空调机的温度传感器是以下哪个器件()R.输入元件B∙反馈元件C.执行元件 D.比较元件11.下列哪一种系统为开环控制系统()A.家用电冰箱温度控制系统B.家用电热水器恒温控制系统C.国内现有的无人操作交通红绿灯自动控制系统D.家用空调机温度控制系统12.奈奎斯特判据中的Z指的是系统的().Λ.开环右极点个数 B.闭环右零点个数C.开环右写点个数D.闭环右极点个数13.对计算采样系统的稳态误差非常仃用的Z变换基本定理是(〉A.线性定理B.初值定理C.第数位移定理D.终值定理14.系统频率特性和传递函数的关系为()A.频率特性与传递函数没有关系B.二者完全是•样的C.传递函数的及变量S用j3代替后,就是相应的频率特性D.频率特性可以用图形表示,传递函数则不能15.在如卜指标中,哪个不能用来评价控制系统的时域性能?()A.调整时间B.稳态位置误差C.最大超调量D.带宽二、多选题(每题的备选答案中有多个最佳答案,每题5分,共50分)16.已知系统的传递函数为,则极点分别为()A.0B.-1.C.-0.5D.-217.按照输入信号的特征,可以将控制系统分为()两种\随动系统 B.连续系统C.线性系统 D.恒值系统18.卜列关于负反馈的描述中,正确的是:()Λ.负反馈能有利于生产设备或工艺过程的稳定运行B.闭环控制系统是含负反馈组成的控制系统C.开环控制系统不存:在负反馈,但存在正反馈D,负反馈系统利用偏差进行输出状态的调节25C.积分环节A.惯性环节B.振荡环节 D.微分环节 E.比例环节三、判断题(对的选*A*,错的选*B*,每题2分,共20分)26.控制的实质可以描述为通过控制装置或者称为控制器,使被控对象或者过程自动的按照预定的规律运行或者变化。
课号:____ CJ2S06A _____ 课名:_控制工程基础______教师: ____ _________一、试写出图示电路的微分方程,并求该系统的传递函数U 0(s)/U i (s)。
(12分)。
解:(1)⎪⎪⎪⎩⎪⎪⎪⎨⎧==++=dt di L u dt du C i u u iR u c c i 00(6分)(2)拉氏变换得:⎪⎩⎪⎨⎧==++=)()()()()()()()(0s LsI s U s CsU s I s U s U s RI s U oc c i (3分)(3)1)()(220++=RCs LCs LCs s U s U i (3分) 二、试求图示框图的传递函数C(s)/R(s)(方法不限,12分)。
解:可以采用其它方法,结果5分,中间过程7分。
k 1ΔΔ1G(s)∑==nk k P74321643743216431 [1ΔG G G G G G G G G G G G G G G G ++=---=43211G G G G P =,1Δ1=; 512G G P =,64321ΔG G G +=;74321643516543143211G G G G G G G G G G G G G G G G G G G G(s)++++=三、某单位负反馈控制系统如图。
已知K=9,设输入信号为单位阶跃函数,求:(16分)(1)闭环传递函数C(s)/R(s); (2)无阻尼振荡频率n ω,阻尼比ξ; (3)单位阶跃响应c(t);(4)上升时间t r ;(5)最大超调量%p σ。
解:(1)闭环传递函数:939)()(2++=s s s R s C (3分) (2)闭环传递函数化为:222335.023)()(+⨯⨯+=s s s R s C ,经比较得:n ω=3,阻尼比ξ=0.5。
阻尼震荡频率6.212=-=n d ωξω。
(3分)(3)因此单位阶跃响应c(t):(4分) )456.2sin(155.11)sin(111)(5.12︒+-=+--=--t e t et c t d tn θωξξω(3)上升时间91.06.24/14.314.3=-=-=d r t ωθπ秒;(3分) (4)最大超调量%3.16%100%21=⨯=--ξξπσe p 。
(3分)解:(1)闭环传递函数:5.05.0)()(2++=s s s R s C (3分) (2)闭环传递函数化为:222707.0707.0707.02707.0)()(+⨯⨯+=s s s R s C ,经比较得:n ω=0.7073,阻尼比ξ=0.7075。
阻尼震荡频率5.012=-=n d ωξω。
(3分)(3)因此单位阶跃响应c(t):(4分) )455.0sin(414.11)sin(111)(5.02︒+-=+--=--t e t et c t d tn θωξξω(3)上升时间71.45.04/14.314.3=-=-=d r t ωθπ秒;(3分) (4)最大超调量%3.4%100%21=⨯=--ξξπσep 。
(3分)课号:____ CJ2S06A _____ 课名:_控制工程基础______教师: ____ _________四、某负反馈控制系统的开环传递函数为)5)(3()1(2+++s s s s k ,试用劳斯判据,确定系统稳定的K 值范围。
(10分)解:系统的特征方程为:(2分)0)1()5)(3(2=++++s K s s s ,即:0158234=++++k ks s s s劳斯列表:(5分)S 4 1 15 k S 3 8 k 0 S 28120k- k S 1kkk --120562S 0 k 0得系统稳定的K 值范围:560<<k 。
(3分) 五、试画单位反馈系统)1()2()(++=s s s k s G 的根轨迹图,讨论根轨迹的分支数、渐近线、实轴上的根轨迹、分离、会合点,并求系统稳定的k 的范围。
(16分)解:(1)开环极点0,-1。
开环零点-2。
根轨迹的分支数为2。
(3分) (2)实轴上的根轨迹为0~-1;-2~-∞。
(2分)(3)渐近线与实轴交点的坐标与渐近线与实轴正方向的夹角分别为:(3分)112)2()1(011=----+=--=∑∑==mn zp σmi in i i aππϕ=-+=mn k a )12((4)分离、会合点坐标为(3分):21111+=++d d d解出:.22 ;2221--=+-=d d 。
根据实轴上的根轨迹可以看出,d1为分离点,d2为会合点。
(5)根轨迹如图。
(3分)(6)因此系统稳定的K 的范围为0<K<∞。
(2分)六、某单位负反馈控制系统的开环传递函数为)2)(1(10++s s ,试求(16分):(1)幅相特性起点、终点坐标以及幅相曲线与负虚轴交点坐标; (2)画出奈氏图;(3根据奈奎斯特判据判定该系统是否稳定。
解:系统开环频率特性为(3分):22229)2(30)2(10)2)(1(10)()(ωωωωωωωω+---=++=j j j j H j G (1)幅相特性起点和终点:(4分)ω=0+ ,︒==0)(,5)(ωϕωA ; 幅相特性终点:ω=∞,︒-==180)(,0)(ωϕωA 幅相曲线与负虚轴交点(3分):令Re[G(j ω)H(j ω)]=0,得:2=ω,弧度/秒,此时Im[G(j ω)H(j ω)]=-325,即幅相曲线与负虚轴交点为(0,-j325)。
课号:____ CJ2S06A _____ 课名:_控制工程基础______教师: ____ _________(2)奈氏图如图所示(3分)。
(3)由于(3分)由于P R =0,N=0;Z=P R -2N=0,所以系统稳定。
七、某最小相位系统的开环对数幅频特性如图,求(18分): (1)系统开环传递函数;(2)写出系统相位特性表达式,并画出系统相位特性; (3)求系统相角裕量和幅值裕量; (4)判定系统的稳定性。
解:(1)系统开环传递函数)105.0()15.0(10)()(2++=s s s s H s G (7分) (2)相角表达式ωωωϕ05.0arctan 5.0arctan 180)(-+︒-= (4分)如图。
(3)相角裕量约54°、幅值裕量∞。
(4分) (3)系统稳定。
(3分)课号:____ CJ2S06A _____ 课名:_控制工程基础______教师: ____ _________一、试写出图示机械装置在外力F 作用下的运动(微分)方程,并求该系统的传递函数Y 0(s)/F(s)。
(12分)解:设M 的位移为y(t)则:(1)⎩⎨⎧'=-''=--000)()(y f y y k y M y y k F (6分)(2)拉氏变换得(3分): ⎩⎨⎧=-=--)())()(()())()(()(0020s fsY s Y s Y k s Y Ms s Y s Y k s F(3)fksMks Mfs ks F s Y ++=230)()((3分) 二、试求图示框图的传递函数C(s)/R(s)(方法不限,12分)。
解:k 1ΔΔ1G(s)∑==nk k P432113243211321][1ΔG G G G H G G G G G G H G G ++=---= 43211G G G G P =,1Δ1=;52G P =,13221ΔH G G +=; 43211325153243211G G G G H G G G H G G G G G G G G(s)++++=三、某单位负反馈控制系统的开环传递函数为)()(a s s ks G +=,已知n ω=4,阻尼比ξ=0.707,输入信号为单位阶跃函数,求:(16分)(1)系统的闭环传递函数C(s)/R(s); (2)确定a ,k 的值; (3)单位阶跃响应c(t); (4)调整时间t s ;(5)最大超调量%p σ。
解:(1)闭环传递函数:kas s ks R s C ++=2)()( (3分) (2)闭环传递函数与22244707.024+⨯⨯⨯+s s 比较得:a=5.565,k=16。
(3分)(3)阻尼震荡频率828.212=-=n d ωξω,因此单位阶跃响应c(t):(4分))30828.2sin(414.11)sin(111)(828.22︒+-=+--=--t e t et c t d tn θωξξω(4)调整时间t s (2%误差):s n414.14=ξω; (3分)(5)最大超调量%3.4%100%21=⨯=--ξξπσep 。
(3分)四、若系统的特征方程为04473223456=-----+s s s s s s ,试用劳斯判据,判定系统稳定性,如不稳定,请确定在S 右半平面的闭环极点数。
(10分)解:(1)劳斯列表:(3分)S 6 1 -2 -7 -4 S 5 1 -3 -4 0 S 4 1 -3 -4 0 S 3 0 0 0(2)由第3行求得辅助方程43)(24--=s s s F ,求导得0643=-s s (2分)课号:____ CJ2S06A _____ 课名:_控制工程基础______教师: ____ _________(3)继续劳斯列表:(2分)S 6 1 -2 -7 -4 S 5 1 -3 -4 0 S 4 1 -3 -4 0 S 3 4 -6 0 0 S 2 -3/2 -4 0 0 S 1 -16.7 0 0 0 S 0 -4 0 0 0 (4)系统不稳定(1分).(5)第一列符号变化一次,有1个闭环极点在s 右半平面(2分)。
五、试画单位反馈系统)84()(2*++=s s s K s G 的根轨迹图,讨论根轨迹的分支数、渐近线、实轴上的根轨迹、求出根轨迹的起始角(出射角)和与虚轴的交点坐标,画出完整根轨迹,并求系统稳定的K*范围。
(16分)解(1)开环极点0,-2-2j ,-2+2j 。
根轨迹的分支数为3;均终止于无穷远处。
(3分) (2)实轴上的根轨迹为0~-∞。
(2分)(3)渐近线与实轴交点的坐标与渐近线与实轴正方向的夹角分别为:(3分)3403)22()22(011-=---++-+=--=∑∑==j j mn z p σmi in i i aππππϕ m n k a ,3,3)12(-=-+=(4)根轨迹的起始角(出射角)(3分) ()()∑∑≠==-∠--∠++=nki i i k m j j k pk p p z p k 11)12(πθ445)432(0)12(2ππππππθ-=-=+-++=k p4)432(0)12(3ππππθ=---++=k p(5)与虚轴的交点:(3分)0840)44(0)()(1*23*23=++--→=+++ =+=K j j K s s s s H s G j s ωωωω即32,220804*3*2=±=⇒⎨⎧=+-=+-K K ωωωω系统稳定的K*范围:0~32。