控制工程基础习题解答(课堂PPT)
- 格式:ppt
- 大小:2.73 MB
- 文档页数:84
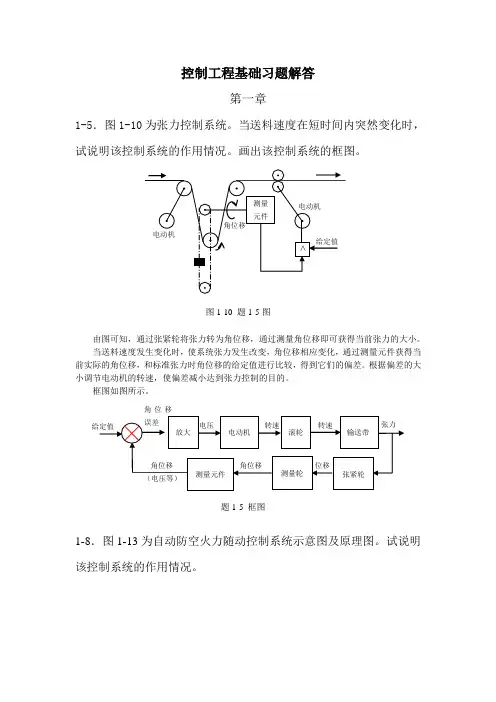
控制工程基础习题解答第一章1-5.图1-10为张力控制系统。
当送料速度在短时间内突然变化时,试说明该控制系统的作用情况。
画出该控制系统的框图。
由图可知,通过张紧轮将张力转为角位移,通过测量角位移即可获得当前张力的大小。
当送料速度发生变化时,使系统张力发生改变,角位移相应变化,通过测量元件获得当前实际的角位移,和标准张力时角位移的给定值进行比较,得到它们的偏差。
根据偏差的大小调节电动机的转速,使偏差减小达到张力控制的目的。
框图如图所示。
1-8.图1-13为自动防空火力随动控制系统示意图及原理图。
试说明该控制系统的作用情况。
题1-5 框图电动机给定值角位移误差张力-转速位移张紧轮滚轮输送带转速测量轮测量元件角位移角位移(电压等)放大电压测量 元件>电动机角位移给定值电动机图1-10 题1-5图该系统由两个自动控制系统串联而成:跟踪控制系统和瞄准控制系统,由跟踪控制系统获得目标的方位角和仰角,经过计算机进行弹道计算后给出火炮瞄准命令作为瞄准系统的给定值,瞄准系统控制火炮的水平旋转和垂直旋转实现瞄准。
跟踪控制系统根据敏感元件的输出获得对目标的跟踪误差,由此调整视线方向,保持敏感元件的最大输出,使视线始终对准目标,实现自动跟踪的功能。
瞄准系统分别由仰角伺服控制系统和方向角伺服控制系统并联组成,根据计算机给出的火炮瞄准命令,和仰角测量装置或水平方向角测量装置获得的火炮实际方位角比较,获得瞄准误差,通过定位伺服机构调整火炮瞄准的角度,实现火炮自动瞄准的功能。
控制工程基础习题解答第二章2-2.试求下列函数的拉氏变换,假定当t<0时,f(t)=0。
(3). ()t et f t10cos 5.0-=解:()[][]()1005.05.010cos 25.0+++==-s s t e L t f L t(5). ()⎪⎭⎫⎝⎛+=35sin πt t f 图1-13 题1-8图敏感 元件定位伺服机构 (方位和仰角)计算机指挥仪目标 方向跟踪环路跟踪 误差瞄准环路火炮方向火炮瞄准命令--视线瞄准 误差伺服机构(控制绕垂直轴转动)伺服机构(控制仰角)视线敏感元件计算机指挥仪解:()[]()252355cos 235sin 2135sin 2++=⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+=s s t t L t L t f L π2-6.试求下列函数的拉氏反变换。
第一章概论本章要求学生了解控制系统的基本概念、研究对象及任务,了解系统的信息传递、反馈和反馈控制的概念及控制系统的分类,开环控制与闭环控制的区别;闭环控制系统的基本原理和组成环节。
学会将简单系统原理图抽象成职能方块图。
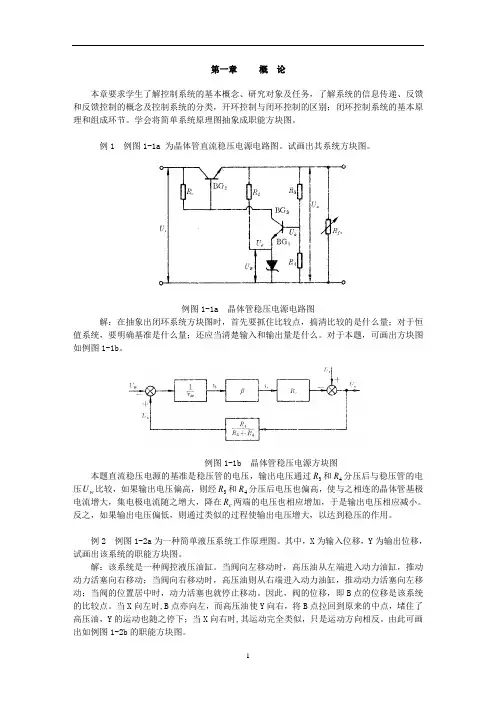
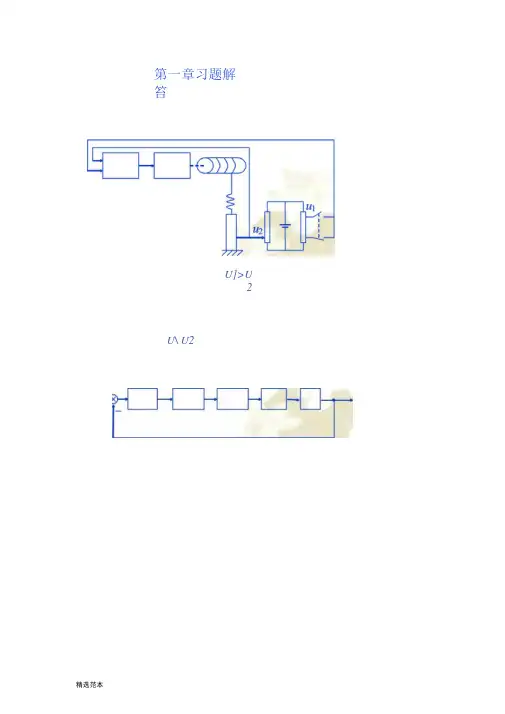
例1 例图1-1a 为晶体管直流稳压电源电路图。
试画出其系统方块图。
例图1-1a 晶体管稳压电源电路图解:在抽象出闭环系统方块图时,首先要抓住比较点,搞清比较的是什么量;对于恒值系统,要明确基准是什么量;还应当清楚输入和输出量是什么。
对于本题,可画出方块图如例图1-1b。
例图1-1b 晶体管稳压电源方块图本题直流稳压电源的基准是稳压管的电压,输出电压通过R和4R分压后与稳压管的电3压U比较,如果输出电压偏高,则经3R和4R分压后电压也偏高,使与之相连的晶体管基极w电流增大,集电极电流随之增大,降在R两端的电压也相应增加,于是输出电压相应减小。
c反之,如果输出电压偏低,则通过类似的过程使输出电压增大,以达到稳压的作用。
例2 例图1-2a为一种简单液压系统工作原理图。
其中,X为输入位移,Y为输出位移,试画出该系统的职能方块图。
解:该系统是一种阀控液压油缸。
当阀向左移动时,高压油从左端进入动力油缸,推动动力活塞向右移动;当阀向右移动时,高压油则从右端进入动力油缸,推动动力活塞向左移动;当阀的位置居中时,动力活塞也就停止移动。
因此,阀的位移,即B点的位移是该系统的比较点。
当X向左时,B点亦向左,而高压油使Y向右,将B点拉回到原来的中点,堵住了高压油,Y的运动也随之停下;当X向右时,其运动完全类似,只是运动方向相反。
由此可画出如例图1-2b的职能方块图。
例图1-2a 简单液压系统例图1-2b 职能方块图1.在给出的几种答案里,选择出正确的答案。
(1)以同等精度元件组成的开环系统和闭环系统,其精度比较为_______ (A )开环高; (B )闭环高; (C )相差不多; (D )一样高。
(2)系统的输出信号对控制作用的影响 (A )开环有; (B )闭环有; (C )都没有; (D )都有。
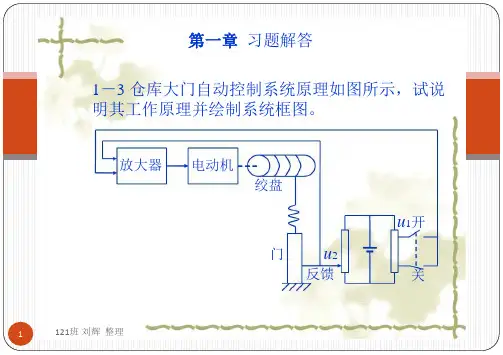
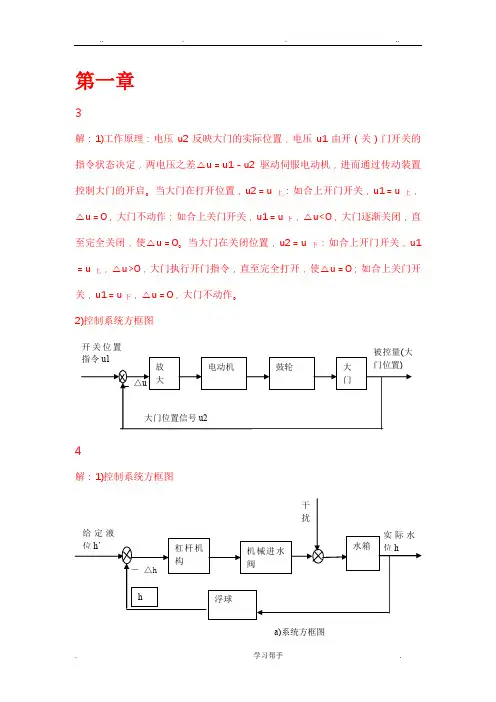
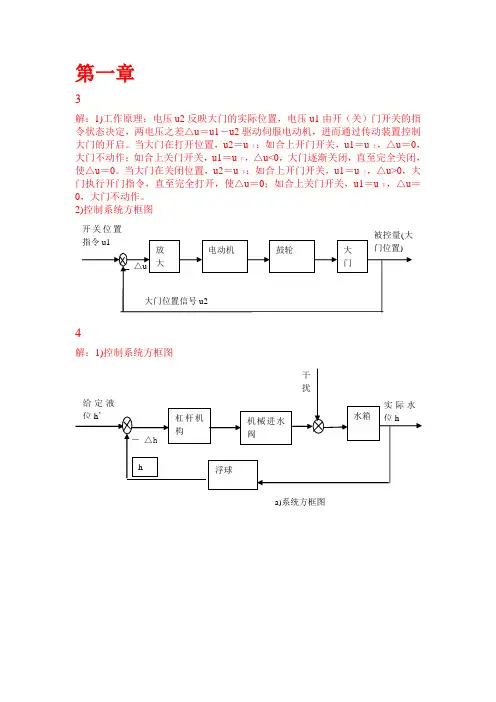
第一章3解:1)工作原理:电压u2反映大门的实际位置,电压u1由开(关)门开关的指令状态决定,两电压之差△u=u1-u2驱动伺服电动机,进而通过传动装置控制大门的开启。
当大门在打开位置,u2=u上:如合上开门开关,u1=u上,△u=0,大门不动作;如合上关门开关,u1=u下,△u<0,大门逐渐关闭,直至完全关闭,使△u=0。
当大门在关闭位置,u2=u下:如合上开门开关,u1=u上,△u>0,大门执行开门指令,直至完全打开,使△u=0;如合上关门开关,u1=u下,△u=0,大门不动作。
2)控制系统方框图4解:1)控制系统方框图2)工作原理:a)水箱是控制对象,水箱的水位是被控量,水位的给定值h’由浮球顶杆的长度给定,杠杆平衡时,进水阀位于某一开度,水位保持在给定值。
当有扰动(水的使用流出量和给水压力的波动)时,水位发生降低(升高),浮球位置也随着降低(升高),通过杠杆机构是进水阀的开度增大(减小),进入水箱的水流量增加(减小),水位升高(降低),浮球也随之升高(降低),进水阀开度增大(减小)量减小,直至达到新的水位平衡。
此为连续控制系统。
b) 水箱是控制对象,水箱的水位是被控量,水位的给定值h’由浮球拉杆的长度给定。
杠杆平衡时,进水阀位于某一开度,水位保持在给定值。
当有扰动(水的使用流出量和给水压力的波动)时,水位发生降低(升高),浮球位置也随着降低(升高),到一定程度后,在浮球拉杆的带动下,电磁阀开关被闭合(断开),进水阀门完全打开(关闭),开始进水(断水),水位升高(降低),浮球也随之升高(降低),直至达到给定的水位高度。
随后水位进一步发生升高(降低),到一定程度后,电磁阀又发生一次打开(闭合)。
此系统是离散控制系统。
2-1解:(c)确定输入输出变量(u1,u2)22111R i R i u += 222R i u = ⎰-=-dt i i Cu u )(11221 得到:1121221222)1(u R R dt du CR u R R dt du CR +=++ 一阶微分方程(e )确定输入输出变量(u1,u2) ⎰++=i d t C iR iR u 1211 Ru u i 21-=消去i 得到:Cudt du R C u dt du R R 1122221)(+=++ 一阶微分方程第二章2-2解:1)确定输入、输出变量f(t)、x 22)对各元件列微分方程:222213311111122222232121311;)(;)()()()()()(x K f dt x x d B f dtdxB f x K f dt t x d m f f f dt t x d m t f t f t f t f K B B K B K B B B K =-====--=--- 3)拉氏变换:)()()()]()([)()]()([)()()(22222222131212131111s X s m s sX B s X K s X s X s B s X s m s X s X s B s sX B s X K s F =---=----4)消去中间变量:)()()()(23223232131123s X sB s m s B K s B s m s B K s B s sX B s F ++++++=+5)拉氏反变换:dtdfB x K K dt dx B K B K B K B K dtx d K m m K B B B B B B dt x d m B m B m B m B dt x d m m s s 3221232123121222212122131323132122142421)()()(=++++++++++++++2-3 解:(2)2112+-+s s t t e e 22--- (4)2)1(13111914191+++-+s s st t t te e e ---+-3191914 (5)2)1(1)1(2)2(2+-+++-s s s t t t te e e ----+-222(6)s s s s s 5.2124225.04225.022++-+⨯⨯-+⨯- 5.222s in 2c o s5.0+----t e t t 2-5解:1)D(s)=0,得到极点:0,0,-2,-5M(s)=0,得到零点:-1,∞+,∞+,∞+ 2) D(s)=0,得到极点:-2,-1,-2 M(s)=0,得到零点:0,0,-1 3) D(s)=0,得到极点:0,231j +-,231j -- M(s)=0,得到零点:-2,∞+,∞+4) D(s)=0,得到极点:-1,-2,∞- M(s)=0,得到零点:∞+2-8解:1)a )建立微分方程dtt dx Bt f t f t x t x k t f t x k t f t f bat f t f t f t f t x m B k k k i k k )()()())()(()()()()()()()()()(202201121==-===--=∙∙b)拉氏变换)()())()(()()()()()()()()()(20220112102s BsX s F s X s X k s F s X k s F s F bas F s F s F s F s X ms k k k i k k =-===--=c)画单元框图(略) d)画系统框图2)a)建立微分方程:dt t dx B t f dt t x t x d B t f t x t x k t f t f t f t f t x m oB o i B i k B B k )()())()(()())()(()()()()()(22110210=-=-=-+=∙∙b)拉氏变换:)()())()(()())()(()()()()()(02211212s sX B s F s X s X s B s F s X s X k s F s F s F s F s X ms B o i B o i k B B k o =-=-=-+=c)绘制单元方框图(略) 4)绘制系统框图2-11解:a)1212321232141H G G H G G H G G G G G -+++b)))((1)(214321214321H G G G G H G G G G G G -++++2-14解:(1)321232132132101111)()(K K K s Ts K K K TsK s K K Ts K s K K s X s X i i ++=+++==φ 321243032132132103402)(111)(1)()()(K K K s Ts sK K s G K K K TsK s K K Ts K s K K s G Ts K K s N s X s n ++-=+++++-==φ(2)由于扰动产生的输出为: )()()()()(321243032102s N K K K s Ts sK K s G K K K s N s s X n ++-==φ要消除扰动对输出的影响,必须使0)(02=s X 得到:0)(430321=-s K K s G K K K 得到:2140)(K K sK s G =第三章3-1解:1)法一:一阶惯性环节的调整时间为4T ,输出达稳态值的98%,故: 4T =1min ,得到:T =15s法二:求出一阶惯性环节的单位阶跃时间响应,代入,求出。
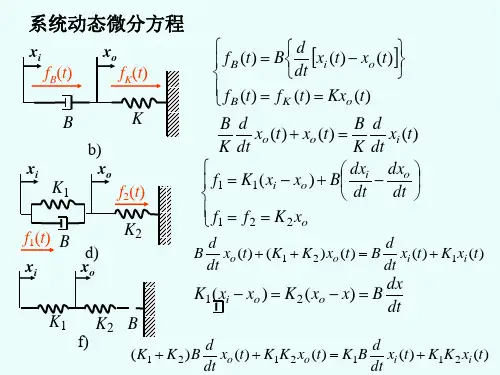
第一章习题解笞U]>U2 U\ U2第二章习题解答2-1a) b)d)f)L^f| 忙d)f\ — fl =^2X O严(f)=$(M+E ⑴虑 如(f) =iQ)RRC^-u o (t)^u o (t) = RC^-u^t) at at fs (r)=B 低[xi (f) -曲(幼 j/B (t)=fK (t) = KXo(t) B dB d 『八10602斤不%()+%©二斤击可()占dR^c —% (0+ (*i + 心)% ⑴=邛应 ~u i (0+ R 2u t (0 atati =i R +,C u o =IR?:R R 严冃3宙 % =gR\ +u oa)=K ](旳一兀)+」:dx o ](J?l + J?2)C —«c (!)+ %("■ R Q C — Wj(O + tti (Oat at(K[ + K2)B — x o (t)+ K\K2X o (t)= K\R 〒曲(f)+ 琦心再(f)dt at10602a) b) c) Q © f)U Q —1/?2 + — j icit— Z/?| + iR-f H —J idte)dxK\% K i (兀 _ %) = K 》(兀)—x)=号二dtoB 2+ (®K° ++ B'B? + 场*3 + 水2〃?)& 2+ (K }B 2+K }B 3 + 心汝 + KM 巴2 + K }K 2X 2 dt3J S + 2用 + 8S-丘($ + 2)($戈+2$十4)广、■炉+ 5,2+9用+7E ($+恥 + 2)乡一rn\fU2K 2rdx { dx 2< dt dt ;/(O™-坷罕~_叭 dtdxj … 一 —- - K?x^ = m dtdx l dx 2dt dt护d 2x 2 2~d^ k,用典2+ (的+创坷+用2创+加2*3);?7皿乔对)13173 G($)= --------------- —(£+。
第一章3解:1)工作原理:电压u2反映大门的实际位置,电压u1由开(关)门开关的指令状态决定,两电压之差△u=u1-u2驱动伺服电动机,进而通过传动装置控制大门的开启。
当大门在打开位置,u2=u上:如合上开门开关,u1=u上,△u=0,大门不动作;如合上关门开关,u1=u下,△u<0,大门逐渐关闭,直至完全关闭,使△u=0。
当大门在关闭位置,u2=u下:如合上开门开关,u1=u上,△u>0,大门执行开门指令,直至完全打开,使△u=0;如合上关门开关,u1=u下,△u=0,大门不动作。
2)控制系统方框图4解:1)控制系统方框图2)工作原理:a)水箱是控制对象,水箱的水位是被控量,水位的给定值h ’由浮球顶杆的长度给定,杠杆平衡时,进水阀位于某一开度,水位保持在给定值。
当有扰动(水的使用流出量和给水压力的波动)时,水位发生降低(升高),浮球位置也随着降低(升高),通过杠杆机构是进水阀的开度增大(减小),进入水箱的水流量增加(减小),水位升高(降低),浮球也随之升高(降低),进水阀开度增大(减小)量减小,直至达到新的水位平衡。
此为连续控制系统。
b) 水箱是控制对象,水箱的水位是被控量,水位的给定值h ’由浮球拉杆的长度给定。
杠杆平衡时,进水阀位于某一开度,水位保持在给定值。
当有扰动(水的使用流出量和给水压力的波动)时,水位发生降低(升高),浮球位置也随着降低(升高),到一定程度后,在浮球拉杆的带动下,电磁阀开关被闭合(断开),进水阀门完全打开(关闭),开始进水(断水),水位升高(降低),浮球也随之升高(降低),直至达到给定的水位高度。
随后水位进一步发生升高(降低),到一定程度后,电磁阀又发生一次打开(闭合)。
此系统是离散控制系统。
2-1解:(c )确定输入输出变量(u1,u2) 22111R i R i u += 222R i u = ⎰-=-dt i i C u u )(11221 得到:1121221222)1(u R Rdt du CR u R R dt du CR +=++ 一阶微分方程(e )确定输入输出变量(u1,u2)⎰++=i d t C iR iR u 1211Ru u i 21-=消去i 得到:Cudt du R C u dt du R R 1122221)(+=++ 一阶微分方程第二章2-2解:1)确定输入、输出变量f(t)、x 22)对各元件列微分方程:222213311111122222232121311;)(;)()()()()()(x K f dtx x d B f dtdxB f x K f dt t x d m f f f dt t x d m t f t f t f t f K B B K B K B B B K =-====--=--- 3)拉氏变换:)()()()]()([)()]()([)()()(22222222131212131111s X s m s sX B s X K s X s X s B s X s m s X s X s B s sX B s X K s F =---=----4)消去中间变量:)()()()(23223232131123s X sB s m s B K s B s m s B K s B s sX B s F ++++++=+5)拉氏反变换:dtdfB x K K dt dx B K B K B K B K dtx d K m m K B B B B B B dt x d m B m B m B m B dt x d m m s s 3221232123121222212122131323132122142421)()()(=++++++++++++++2-3 解:(2)2112+-+s s t t e e 22--- (4)2)1(13111914191+++-+s s st t t te e e ---+-3191914 (5)2)1(1)1(2)2(2+-+++-s s s t t t te e e ----+-222 (6)s s s s s 5.2124225.04225.022++-+⨯⨯-+⨯-5.222s i n 2c o s 5.0+----t e t t 2-5解:1)D(s)=0,得到极点:0,0,-2,-5M(s)=0,得到零点:-1,∞+,∞+,∞+ 2) D(s)=0,得到极点:-2,-1,-2 M(s)=0,得到零点:0,0,-1 3) D(s)=0,得到极点:0,231j +-,231j -- M(s)=0,得到零点:-2,∞+,∞+4) D(s)=0,得到极点:-1,-2,∞- M(s)=0,得到零点:∞+2-8解:1)a )建立微分方程dtt dx Bt f t f t x t x k t f t x k t f t f bat f t f t f t f t x m B k k k i k k )()()())()(()()()()()()()()()(202201121==-===--=∙∙b)拉氏变换)()())()(()()()()()()()()()(20220112102s BsX s F s X s X k s F s X k s F s F bas F s F s F s F s X m s k k k i k k =-===--=c)画单元框图(略) d)画系统框图2)a)建立微分方程:dt t dx B t f dt t x t x d B t f t x t x k t f t f t f t f t x m oB o i B i k B B k )()())()(()())()(()()()()()(22110210=-=-=-+=∙∙b)拉氏变换:)()())()(()())()(()()()()()(02211212s sX B s F s X s X s B s F s X s X k s F s F s F s F s X m s B o i B o i k B B k o =-=-=-+=c)绘制单元方框图(略) 4)绘制系统框图2-11解:a)1212321232141H G G H G G H G G G G G -+++b)))((1)(214321214321H G G G G H G G G G G G -++++2-14解:(1)321232132132101111)()(K K K s Ts K K K TsK s K K Ts K s K K s X s X i i ++=+++==φ 321243032132132103402)(111)(1)()()(K K K s Ts s K K s G K K K TsK s K K Ts K s K K s G Ts K K s N s X s n ++-=+++++-==φ(2)由于扰动产生的输出为: )()()()()(321243032102s N K K K s Ts sK K s G K K K s N s s X n ++-==φ要消除扰动对输出的影响,必须使0)(02=s X 得到:0)(430321=-s K K s G K K K得到:2140)(K K sK s G =第三章3-1解:1)法一:一阶惯性环节的调整时间为4T ,输出达稳态值的98%,故: 4T =1min ,得到:T =15s法二:求出一阶惯性环节的单位阶跃时间响应,代入,求出。