基于波叠加方法的半自由声场全息理论
- 格式:pdf
- 大小:378.06 KB
- 文档页数:9
哈尔滨工程大学硕士学位论文摘要近场声全息技术是声场预报和声源识别的一种重要途径,通过提取声源近场附近的声场所包含的信息即可计算出声源表面声压和质点振速等声学量,进而重建出整个三维声场。
传统近场声全息技术要求所有声源均处于全息面的一边,而另一边为自由场。
实际上,声源所处的环境往往并非自由场,通常会有边界的限制,这就导致了全息测量面获得声场数据不仅仅是声源的直接辐射的声波,还包括了由于界面多次反射所产生的声波。
由此,在非自由场中,采用传统近场声全息技术通常无法实现声源的准确识别。
因此,本文提出了有限空间中基于等效源法的近场声全息技术。
本文首先针对现有的自由场中基于等效源法的近场声全息技术进行了理论研究,以点源组合和结构声源为研究对象,数值分析了该方法的可行性和有效性,并分析了全息面布放方式、全息面测点间距以及声源频率等对于重建精度的影响。
在有限空间中采用近场声全息法进行声源识别和声场重建时,由于通常会受到边界影响,无法给出格林函数的解析解。
所以本文提出采用数值计算的方式来获取有限空间中格林函数的方法,利用数值计算的格林函数来实现声源在自由场中的三维声场重建。
并将其应用于点源组合和结构声源在自由场中的声辐射预报和声场重建,分析了不同声源频率、全息面尺寸、全息测点间距以及全息面位置对于重建精度的影响。
结果表明:本文提出的方法解决了近场声全息技术只能应用于自由场和半空间声场的问题。
可以应用于非自由声场中的声场重构,具有较好的效果。
关键词:有限空间;等效源法;近场声全息技术;格林函数;声场重建ABSTRACTNear-field acoustic holography(NAH)is an important method for sound field prediction and sound source identification. Using NAH technology, the sound pressures on the surface of the sound source and the vibration velocities of the particles can be calculated by extracting sound information in the near field of the sound source, and then the entire three-dimensional sound field can be reconstructed. Traditional near-field acoustic holography technology requires all sound sources to be on the same side of the holographic surface and the other side to be a free field. Usually, the environment in which the sound source is located, however, is not a free field because of the boundary restrictions. So, the sound field data obtained by the holographic measurement surface is not only the sound waves directly radiated by the sound source, but also the multiple reflections at the interface. Therefore, the sound source cannot be identified accurately by conventional near-field acoustic holography. In this paper, proposes a near-field acoustic holography technique based on the equivalent source method in limited space has been proposed.NAH technology based on the equivalent source method in the free field is studied firstly. Then, the point source combination and structural sound source are taken as the research object, the feasibility and effectiveness of this method are analyzed numerically. And the influences of the holographic surface layout method, the distance between the measuring points of the holographic surface and the frequency of the sound source on the reconstruction accuracy have been analyzed.Aiming at the problem of sound source identification and sound field reconstruction in a limited space, the analytical solution of the Green's function cannot be given due to the limitations of the boundary properties. Therefore, this paper proposes a method to obtain the Green's function in finite space by numerical calculation,and then the three-dimensional sound field of the sound source in the free field is reconstructed by the Green’s function .It is also applied to the acoustic radiation prediction and sound field reconstruction point source combination and structured sound source. The effects of sound source frequencies, holographic surface size, holographic measurement point spacing, and holographic surface position on reconstruction accuracy are analyzed. The results show that the method proposed in this paper can be used for sound field reconstruction in non-free sound fields, and has a good effect. This method solves the limitation that traditional NAH could only be applied to free-field and half-space acoustic fields.目录第1章绪论 (1)1.1 论文背景及研究目的 (1)1.2 国内外研究现状 (2)1.2.1 近场声全息研究现状 (2)1.2.2 有限空间声场测量技术 (5)1.3 本文主要内容与章节安排 (7)1.3.1 本文主要内容 (7)1.3.2 章节安排 (7)第2章基于等效源法的近场声全息变换方法 (9)2.1 引言 (9)2.2 等效源积分方程 (9)2.3 基于等效源法的近场声全息变换方法基本原理 (11)2.4 数值仿真分析 (12)2.4.1 点源组合情况的数值仿真分析 (12)2.4.2 球壳结构近场声全息变换数值仿真分析 (14)2.5 本章小结 (18)第3章有限空间中基于等效源法的近场声全息变换方法 (21)3.1 引言 (21)3.2 有限空间中基于等效源法的近场声全息变换理论模型 (21)3.3 有限空间中声场重构 (22)3.3.1 有限元法 (22)3.3.2 有限空间中声场重构步骤 (23)3.4 有限空间中基于等效源法的近场声全息理论模型的有效性验证 (24)3.5 本章小结 (25)第4章矩形水池中近场声全息变换方法数值仿真分析 (27)4.1 引言 (27)4.2 有限空间中点源组合的数值仿真分析 (27)4.3 不同全息测量参数情况下点源组合的数值仿真分析 (31)4.3.1 全息面尺寸和测点间距对全息重建的影响 (31)哈尔滨工程大学硕士学位论文4.3.2 全息面位置对全息重建的影响 (37)4.4 本章小结 (39)第5章循环水槽中近场声全息变换方法数值仿真分析 (41)5.1 引言 (41)5.2 不同边界条件下点源组合的数值仿真分析 (41)5.2.1 阻抗边界条件 (42)5.2.2 绝对软边界 (46)5.2.3 绝对硬边界 (51)5.2.4 整体绝对硬边界 (56)5.3 球壳结构表面源强度近场声全息变换数值仿真分析 (60)5.4 本章小结 (66)结论 (68)参考文献 (70)攻读硕士学位期间发表的论文和取得的科研成果 (74)致谢 (75)第1章绪论第1章绪论1.1 论文背景及研究目的控制水下航行体的辐射噪声水平是提高其自身隐蔽性、增强自身战斗力的重要保证。
强干扰环境下双面Patch近场声全息技术张诗科;朱海潮;毛荣富;苏俊博;苏常伟【摘要】针对目标声源在强干扰环境下进行声场重建易受到干扰源、散射效应影响及测量孔径效应的双重问题,提出强干扰声场环境下基于声辐射模态声场分离算法的双面Patch近场声全息技术.通过理论分析和公式推导,建立了基于声辐射模态声场分离算法的内插外推数学模型,不仅清除干扰源声场及散射声场的影响,而且减少测量工作量,加快计算速度;数值仿真及实验表明,强干扰环境下忽略散射声场的影响很难重建目标声源的声场,且随着干扰源强度增大分离误差逐渐增大,而利用文中究的理论同时剔除了散射声场及干扰源声场的影响,提高了声场重建的精度,降低了测量成本.%Aiming at the twin problems that sound field reconstruction of the target sound source is easy to be disturbed by the interference sound source, scattering sound field and the measuring aperture effect, the Double-layer Patch near-field acoustic holography based on acoustic field separation algorithm of acoustic radiation modes under strong interference environment is presented.Firstly, the internal difference extrapolation mathematical model based on acoustic field separation algorithm of acoustic radiation modes is established by theoretical analysis and formula deduction.It not only eliminates the influence of the interference sound source and the scattered sound field, but also reduces the workload of the measurement and speeds up the calculation speed.Then the numerical simulation and experimental results verify the theoretical correctness.Numerical simulation and experimental results show that neglecting the influence of the scattered field would make itdifficult to reconstruct the sound field of the target source under strong interference environment and the separation error increases with the increase of the intensity of the interference source.By using the theory of this paper, the influence of scattering sound field and the sound field is eliminated, the reconstruction accuracy is improved and the cost is reduced.【期刊名称】《武汉理工大学学报(交通科学与工程版)》【年(卷),期】2016(040)006【总页数】7页(P1025-1031)【关键词】声全息;强干扰环境;声辐射模态;声场分离【作者】张诗科;朱海潮;毛荣富;苏俊博;苏常伟【作者单位】海军工程大学振动与噪声研究所武汉 430033;船舶振动噪声重点实验室武汉 430033;海军工程大学振动与噪声研究所武汉 430033;船舶振动噪声重点实验室武汉 430033;海军工程大学振动与噪声研究所武汉 430033;船舶振动噪声重点实验室武汉 430033;海军工程大学振动与噪声研究所武汉 430033;船舶振动噪声重点实验室武汉 430033;海军工程大学振动与噪声研究所武汉 430033;船舶振动噪声重点实验室武汉 430033【正文语种】中文【中图分类】TB532近场声全息技术在声场重建过程中保留了高波数空间的倐逝波成分,提高了重建精度,从全息领域脱颖而出.然而,常规的近场声全息技术在测量过程中不仅对声场环境要求严格,即要求所有声源位于测量面一侧,以满足测量面另一侧为自由场条件,而且为了保证重建精度,通常要求测量面的测量孔径必须大于实际声源的尺寸[1].但是,实际的测量环境比较复杂,测量面的两侧或都存在声源,或存在其他物体的散射、反射,若直接进行测量会产生较大的重建误差.此时,声源识别及声场预测的关键在于能否将目标声源从复杂声场环境中分离出来.另外,对于大尺寸结构声源的测量,不仅测量工作量较大、计算速度慢,而且测量成本较高.于是,在针对以上2个问题的研究中形成了基于近场声全息的声场分离技术及基于内插外推的Patch技术.目前在非自由声场环境下声场分离技术的应用研究中形成了基于空间声场变换理论、边界元法、波叠加法、统计最优法等多种算法声场分离技术.毕传兴等[2]利用空间Fourier变换算法提出基于质点振速的双面声场分离技术,在近场声全息声场重建中取得很好的效果.但是,空间Fourier变换算法在计算中不仅要求测量面的形状与声源面共形,而且测量面尺寸容易带来窗效应和卷绕误差.Valdivia等[3]利用基于边界元法的双面声场分离技术实现了目标声源的声场分离及重建.基于边界元法的声场分离技术虽然能够实现任意形状声源的声场分离及重建,但是边界源法不仅存在特征波数处解的非唯一性问题,而且随着声源尺寸增大,表面网格数目划分较多,计算量增大.毕传兴等[4]基于等效源法利用双测量面上的质点振速数据实现目标声源的速度场的分离及重建.等效源法虽然克服了奇异积分和解的非唯一性问题,但是要求测点数目必须大于等效源数目并存在逆问题处理问题.Fernandez等[5]采用基于统计最优的双面质点振速声场分离技术实现目标声源的速度场分离及重建,并与单面声压-质点振速声场分离技术作对比,证明其优越性.统计最优算法虽避免了窗效应及卷绕误差,十分适合局部声场的重建,但是无法实现复杂结构声源的声场重建.BraiKia等[6]利用球面波叠加方法不仅去除了球体声源外干扰声源的影响,而且去除了干扰声源在目标声源表面散射声的影响,大大提高了声场重建的精度.球面波叠加方法适合于类球形声源,对于其他形状声源声场重建效果不好.另外,综合考虑声场分离技术与基于数据内插与外推Patch技术的研究并不多,毕传兴等[7]研究了非自由场环境下基于空间声场变换理论的双面Patch声场分离技术,对非自由声场环境下局部声源的识别进行了初步研究,减少了测量工作量,为大尺寸结构声源内部声场的重建提供了理论基础,但是仍需要进一步研究各参数与误差间的关系.文中综合考虑以上所提2个问题及各种算法的优缺点,将声辐射模态应用于非自由场环境下目标声源的声场分离与重建,既具有等效源法和边界元法适用于复杂结构声源声场重建的优点,又克服了它们的缺陷,而且利用声辐射模态的空间滤波特性,实现利用声场中少量测点的数据准确剔除干扰源影响的同时为进一步的声场重建提供较多测点全息数据的目的.在强干扰声场环境下,干扰声源在目标声源表面产生的散射效应明显,实际的测量环境比较复杂,此时的声场环境应包含目标声源的声场、干扰源产生的声场及散射声场.目标声源的声场分离时只考虑干扰源声场而忽视散射声场的影响,会给目标声源声场的分离带来很大的误差,尤其在散射声场影响较为明显时,会导致目标源声场分离的失败.所以,在强干扰声场环境下实现目标源声场的分离,不得不同时剔除干扰源声场及散射声场的影响.文中充分考虑强干扰环境下声场的特点,从确保声场重建精度,减少测量成本入手,运用源强声辐射模态理论及Patch近场声全息技术,推导出了强干扰环境下目标源声场分离公式,同时剔除了干扰源声场及散射声场的影响,为声场重建提供准确数据.数值仿真及实验研究对研究理论进行了正确性验证.1.1 目标声源分离技术置于密度为ρ0、声速为c0均质流体中的复杂结构以角频率ω振动,向结构外空间辐射声能量.在边界表面S0上满足Neumann边界条件,在无穷远处满足Sommerfeld辐射条件,向外辐射的声场满足Helmhotlz方程,在省略时间相关项e-jωt后,由声辐射模态理论[8],可得振源在全息面处的声压矩阵与振速矩阵式中:G,D为声场中N个点与声源表面上M个点之间的传递矩阵;Φ为声辐射模态;Ψ,Ψv分别为声压声场分布模态及振速声场分布模态;C为声源的声场分布模态对应的展开系数矩阵.当全息面位置及声源结构形状确定的条件下,G、Φ、Ψ、Ψv都是可直接求取的量,声压计算时可认为是已知的量,见图1.由图1可知,目标声源和干扰声源在测量面两侧,采用双测量面测量声场声压,测量面SH1上测得的声压数据记为p1;测量面SH2上测得的声压数据记为p2.在强干扰声场环境下,干扰声源在目标声源表面产生的散射效应比较显著,全息面上测量的声压由目标声源的声场、干扰源产生的声场及干扰声源在目标声源表面产生的散射声场组成.其中,目标声源声场与散射声场向外辐射声压记为pout;干扰声源向内入射的声压记为pin.可以得到联立式(3),(4)可得声辐射模态对应的展开系数为式中:上标+求伪逆;分别为向外辐射声场与向内辐射声场在全息面SH1处的声压声场分布模态;C1,C2为对应声场分布模态展开系数;分别为目标声源与干扰声源在全息面SH2处的声压声场分布模态,当声压声场分布模态Ψ的条件数较大时,声压数据的微小扰动会被极大的放大,从而造成系数解的不准确性,所以需要对求逆过程进行正则化处理.根据求得的系数C1可以求出测量面SH1上向外声场产生的声压为又因为是由目标源声场与散射声场共同产生,所以有式中分别为目标源声场与散射声场在全息面SH1上的声压响应;C11为目标声源在全息面SH1上的声场分布模态对应的展开系数.散射声场的声压响应可通过下面计算得到.在目标声源表面,声压和质点振速的关系为式中:Y0为表面导纳矩阵;为干扰源声场在目标源表面的法向振速和声压;为干扰源在目标源表面离散点处散射声场的法向振速和声压.其计算方法为将式(10)~(13)与式(9)联合可以得到C3的求解公式.式中分别为干扰声源在目标声源表面的声压声辐射模态及振速声辐射模态;分别为散射声场在目标声源表面的声压声辐射模态及振速声辐射模态.若把静止目标声源看成散射体,则散射场声场分布模态近似等于目标源声场分布模态.将(14)式代入(8)式可得目标声源在全息面SH1上的声压响应.式中为目标声源单独作用时在全息面上SH1的声压分布.干扰声源在全息面上声压分布的求解原理与目标声源一致,文中在分离过程中只讨论目标声源的声场分离与重建.在计算过程中,需要注意2个问题:(1)逆处理过程具有求解的不适定性问题,需要进行正则化处理;(2)声辐射模态阶数的选取,选取的模态阶数较低则获取声源的有用信息则较少,而高阶声辐射模态对微小误差非常敏感,所以需要选取合适的声辐射模态阶数进行计算,这样既可以减少计算量又可以降低分离误差.本文在计算过程中采用了Tikhonov正则化方法,同时引入Helmholtz最小二乘法选取最优模态阶数[9].当干扰源的强度较小时,可忽略散射声场的影响,则全息面上的声压由目标源声场及干扰源声场声压组成,从而计算得到目标声源在全息面SH1上的声压为1.2 基于内插与外推的Patch技术全息面上的声压与声场分布模态有关,而声场分布模态又与全息面上的测点分布有关.倏逝波与高阶声辐射模态有关,在不影响获取充足倏逝波的条件下,利用最优模态截止方法对模态阶数进行截取,从而可对基于数据内插与外推的Patch近场声全息技术进行研究.假设目标声源在全息面SH1上的模态截止阶数为M0,全息面上的测点数目为N1,则目标声源在全息面上的声压可表示为式中:Ψ1(N1×M0)分别为目标声源在全息面上的声压声场分布模态,模态截止阶数为M0;C1(M0×1)为对应的声场分布声辐射模态展开系数.扩大全息面的测量点数,使之具有N个测点,且N大于N1,则可得目标声源在N个测点测量面上声压为式中:Ψ1(N×M0)为目标声源在N个测点全息面上的声压声场分布模态.联立式(17)与式(18)消去C1(M0×1)可得式中:ppatch为全息面上N个测点的声压数据;p1(N1×1)为全息面上N1个测点的声压数据;Ψ1(N×M0),Ψ1(N1×M0)为可以计算的量,若已知全息面上N1个测点的p1(N1×1)的数据就可以预估全息面上N个测点ppatch的数据,即利用全息面上少量测点的声压数据预估更多测点声压的数据.为验证本文研究理论的正确性,在测量面两侧采用不同声源进行仿真分析,假定目标声源为受简谐激励的简支板,干扰源为刚性脉动球,半径为5 cm.简支平板参数如下:平板尺寸为0.5 m×0.5 m,厚度为8 mm,泊松比υ取0.28,杨氏模量E 为2×1011 Pa,密度ρ为7 800 kg/m3.数值仿真计算中,测量面SH1和SH2大小皆为1×1 m,其上均布13×13个测量点,目标声源与全息测量面SH1距离为d1=0.02 m,干扰源与测量面SH2距离为d2=0.05 m,2全息面之间的间距为Δd=0.03 m.以简支板中心为坐标原点建立空间直角坐标系,干扰源小球的球心坐标位于点(0,0,d1+d2+Δd)处,仿真中假设钢板表面是刚性边界,则脉动球在钢板表面产生的散射声场相当于在(0,0,-d1-d2-Δd)处相同的脉动小球产生的声场.现定义干扰声源与目标声源在全息面SH1上的辐射声功率比为式中:‖‖2为目标声源在全息面SH1上的声压矩阵2-范数;‖‖2为干扰声源在全息面SH1上的声压矩阵2-范数.目标源声场声压的分离误差定义为式中为目标声源在全息面上SH1的声压计算值;为目标声源在全息面上SH1的声压理论值.2.1 理论正确性验证取激振频率f=600 Hz,作用在平板(x0, y0)=(0.125, 0.125)的位置处.为了使仿真结果接近真实测量情况,对测量面的声压数据加入了30 dB的随机白噪声.此次仿真为模拟强干扰的声场环境,采用的辐射声功率比为0 dB,即干扰声源与目标声源在全面SH1上的声源强度相同.图2a)为13×13个测点的表示全息面SH1上声压p1幅值分布图;图2b)为13×13个测点的全息面SH1上忽略散射声场分离所得声压幅值分布图;图2c)为13×13个测点的全息面SH1上目标声源的理论声压幅值分布图;图2d)为13×13个测点的全息面SH1上剔除散射声场分离所得声压幅值分布图;图2e)为全息面SH1上13×13个测点预估27×27个测点的剔除散射声场分离所得声压ppatch幅值分布.从图2可知,直接测量所得声压的高声压区域位置发生偏移,所有区域声压数据皆被放大,测量误差高达126.45%;忽略散射声场进行声场分离所得声压幅值分布图像的中部区域出现伪声压,分离误差达42.37%;剔除散射声场进行声场分离所得声压幅值分布图像与理论声压幅值分布图像非常相似,较好的反映目标源声场的实际情况,分离误差仅为12.96%;对剔除散射声场分离所得声压数据进行2倍内插与外推处理,patch误差为13.47%.数值仿真表明,剔除散射声场进行声场分离能够进一步提高目标源声场的重建精度;对分离数据进行内插外推后,依然能够反映目标源声场的实际情况,图像渐变区域更加圆滑,误差并增大幅度可以忽略不计.强干扰环境下的干扰源强度、激励频率等关键参数对分离误差会产生一定的影响,下面分析参数变化对分离结果产生的具体影响.2.2 干扰源强度的影响调整刚性脉动小球表面振速,改变干扰声源的辐射声功率,实现全息面SH1上干扰声源与目标声源的辐射声功率比调节,从而模拟不同干扰源强度下的声场环境,见图3.如图3所示,剔除散射和忽略散射2种情况下,不同干扰源强度环境下的误差曲线图.由图可以看出,当辐射声功率比较小,即目标源的辐射声功率远大于干扰源的辐射声功率时,此时散射声场的影响并不显著,剔除散射及忽略散射进行声场分离都能取得很好的效果.当辐射声功率比较大时,干扰源的辐射强度增大,散射声场的影响开始凸显,忽略散射进行声场分离误差变大,且随着声功率比的增大而增大,若声功率比较大则很难将目标声源的声场分离出来;而剔除散射进行声场分离时,随着声功率比的增大,误差略有增大,但增加幅度非常小;插值后patch误差比插值前误差略小,但两者相差不大,变化趋势相似,patch技术能够有效实现强干扰声场环境下目标声源的声场分离.由此可以看出,强干扰声场环境下,散射声场影响显著,声场分离时必须同时剔除干扰源声场及散射声场的影响才能有效重建目标源的声场.2.3 激励频率的影响辐射声功率比为-1 dB,其他参数与上文仿真中保持一致.频率在较大范围内进行遍历选取,采用双面Patch技术对阵列信息进行处理,见图4.不考虑干扰源影响直接测量误差大部分在75%以上,忽略散射声场分离误差大部分在40%以上,剔除散射声场分离误差始终低于20%,可以看出该方法对干扰声源的影响具有很强的抑制作用;从整个曲线变化趋势上可以看出,随着激励频率的增高误差有增大趋势,中低频段的分离效果较好而高频段的分离效果较差,这是因为高频段的波长较短,测量所需测点间距更小,而实际仿真中要保持测点间距不变,所以采集到的声场信息并不充分,测量误差在逆运算过程中被放大,致使分离误差增大,但分离效果仍然处于可接受范围之内.以固支平板为目标声源,音箱为干扰声源进行实验研究,验证理论的正确性.固支平板是大小为0.5 m×0.5 m、厚度为0.001 m的钢板,由信号发生器产生一路信号送入JZK-2型激振器激励钢板,产生稳态声场.音箱声源尺寸为0.13 m×0.14m×0.23 m,信号发生器经同一通道同时发出激振信号和音响信号.全息面的测量网格点数为13(X向)×13(Y向),2个方向上的传声器的间距均为5 cm.测量时设有15个通道,前13通道为阵列传声器,第14通道为参考传声器,第15通道为参考加速度传感器.以平板中心为坐标原点建立空间直角坐标系,激励点坐标为(0.125,-0.125,0),板对角布置参考加速度传感器.平板、音箱、测量面布置时保持三者的中心点在一条直线上.第一次测量时,线阵从右至左进行扫描(以测量者为基准,测量者面对目标声源),测量面与目标声源面的距离为0.04 m,目标声源面与干扰声源面的距离为0.5 m,采样频率2 048 Hz,采样时间间隔为1 s,利用单参考源传递函数法计算各测点复声压并作为全息面SH1上的声压数据.第二次测量时,测量面与目标声源面的距离为0.08 m,其他保持不变,测量计算的复声压作为全息面SH2上的声压数据.同理,设置全息面的测量网格点数7(X向)×7 (Y 向),其他设置方法及参数保持不变,研究patch技术.实验现场见图5.图6为137 Hz时测量面SH1上的声压幅值分布图.实验时,首先用激振器对平板进行单独激励,激励频率为137 Hz,利用线阵进行扫描,设置测量面与目标声源面距离为0.04 m,得到13×13测点下平板声场的理论声压数据幅值分布图,见图6b);然后打开音箱,频率与目标声源的激励频率保持一致,再用线阵进行扫描,得到13×13测点下干扰环境下混合声场的声压数据p1幅值分布图,见图6a),直接测量伪声压区域增多,很难重建目标声源声场,测量误差达328.56%;调整测量面与目标声源面距离为0.08 m,得到13×13测点下干扰环境下混合声场的声压数据p2.利用p1,p2声压数据进行声场分离,得到忽略散射进行声场分离全息面SH1上的声压幅值分布图,见图6c),伪声压区域增加,并不能确定目标声源的峰值准确信息,此时分离误差达76.34%;剔除散射进行声场分离全息面SH1上的声压幅值分布图,见图6d),重建目标声源的声场与目标声源的理论声场十分吻合,分离误差仅为23.38%.同理,利用7×7个测点重复上述步骤,剔除散射进行声场分离并利用patch技术预估13×13测点下的全息面SH1上的声压数据,幅值分布图见图6e),与理论声场基本吻合,较好反映了目标源声场的位置信息,patch误差为26.47%.对实验结果的有效性进行进一步的研究,分别对不同的频率进行了研究,各类误差见表1.1) 强干扰声场环境下,利用直接测量的声压数据很难重建目标声源的声场;忽略散射进行声场分离依然很大,不能反映目标声源的声场信息;只有同时剔除散射声场及干扰源声场的影响才能比较准确的重建目标声源的声场.2) 随着干扰源强度增大,即干扰声源与目标声源的声功率比增加,剔除散射及忽略散射下的分离误差都会增大,但剔除散射下的分离误差增加幅度非常小,而忽略散射下的分离误差则快速增加;随着激励频率的增高误差有增大趋势,中低频段的分离效果较好而高频段的分离效果较差.3) 数值仿真及实验表明,强干扰声场环境下基于声辐射模态声场分离理论的patch技术在减少测量工作量,提高计算速度的同时,实现了目标声源的声场重建.【相关文献】[1]陈心昭,毕传兴.近场声全息技术及其应用[M].北京:科学出版社,2013.[2]毕传兴,张永斌,徐亮,等.基于双面质点振速测量的声场分离技术[J].声学学报,2010,35(6):653-658.[3]VALDIVIA N P, WILLIAMS E G, HERDIC P C. Approximations of inverse boundary element methods with partial measurements of the pressure field[J]. Journal of the Acoustics Society of America,2008(1):109-120.[4]毕传兴,胡定玉,张永斌,等.基于等效源法和双面质点振速测量的声场分离方法[J].物理学报,2013,62(8):284-301.[5]FERNANDEZ G E F,JACOBSEN F. Sound field separation with a double layer velocity transducer array[J].Journal of the Acoustics Society of America,2013(1):5-8.[6]BRAIKIA Y, MELON M, LANGRENNE C, et al. Evaluation of a separation method for source identification in small spaces[J]. Journal of the Acoustics Society of America,2013(1):323-331.[7]毕传兴,唐琦,张永斌,等.双面Patch近场声全息实验研究[J].合肥工业大学学报,2011,34(3):321-325.[8]聂永发,朱海潮.利用源强密度声辐射模态重建声场[J].物理学报,2014,63(10):256-267.[9]王冉,陈进,董广明.基于改进HELS方法的局部近场声全息技术研究[J].振动与冲击,2014,33(10):157-161.。
![基于波叠加法的声场重建方法[发明专利]](https://uimg.taocdn.com/01f7265ca36925c52cc58bd63186bceb19e8ed3b.webp)
专利名称:基于波叠加法的声场重建方法
专利类型:发明专利
发明人:肖友洪,晋峰,陈林,卢华兵,原野,陈芳超申请号:CN202111473623.7
申请日:20211129
公开号:CN114112019A
公开日:
20220301
专利内容由知识产权出版社提供
摘要:本发明提供了一种基于波叠加法的声场重建方法,包括:在待测空间中布置若干声压传感器,得到测量声压列向量P;在所述待测空间中布置若干等效源点,建立所述测量声压列向量P与所述等效源点的源强的声压传递矩阵Geh;利用迭代阈值滤波方法求解所述等效源点的所述源强的向量Q;所述迭代阈值滤波方法中的阈值从所述等效源点的所述源强中选取;建立所述等效源点与待重建场点的声压传递矩阵Ger;利用公式Pr=GerQ获得待重建场点的声压,实现声场的重建。
本发明的声场重建方法,在低频的声场重建中能获得精度较高的重建结果。
申请人:哈尔滨工程大学
地址:150001 黑龙江省哈尔滨市南岗区南通大街145号
国籍:CN
代理机构:北京兆君联合知识产权代理事务所(普通合伙)
代理人:闫强
更多信息请下载全文后查看。
基于联合波叠加法的浅海信道下r圆柱壳声辐射研究商德江;钱治文;何元安;肖妍【摘要】针对浅海信道下弹性结构声辐射预报尚无高效可靠的研究方法,提出了一种浅海信道下弹性结构声辐射快速预报的联合波叠加法.该方法结合了浅海信道传输函数、多物理场耦合数?计算法和波叠加法理论,运用该方法可对浅海信道下弹性结构辐射声场进行快速预报.经数?法和解析解法验证后,从信道下辐射源、环境影响和辐射声场测量的角度研究分析了浅海信道下弹性圆柱壳的声辐射特性,阐释了进行浅海信道下结构声辐射研究的必要性.研究结果表明,仅在低频浅海信道下弹性结构可近似等效为点源,信道上下边界对声场产生显著的耦合影响,高频段的空间声场指向性分布尤为明显,垂直线列阵进行信道下结构辐射声功率测量时,测量结果受到信道环境边界和潜深的影响较大.【期刊名称】《物理学报》【年(卷),期】2018(067)008【总页数】15页(P128-142)【关键词】浅海信道;弹性圆柱壳;联合波叠加法;声辐射特性【作者】商德江;钱治文;何元安;肖妍【作者单位】哈尔滨工程大学, 水声技术重点实验室, 哈尔滨 150001;哈尔滨工程大学水声工程学院, 哈尔滨 150001;哈尔滨工程大学, 水声技术重点实验室, 哈尔滨150001;哈尔滨工程大学水声工程学院, 哈尔滨 150001;中国船舶工业系统工程研究院, 北京 100036;哈尔滨工程大学, 水声技术重点实验室, 哈尔滨 150001;哈尔滨工程大学水声工程学院, 哈尔滨 150001【正文语种】中文1 引言我国领海大多属于水深小于200 m的典型浅海环境,潜器结构在浅海所处的声场环境并非自由场,存在水面和水底的反射、散射[1].研究潜器结构在浅海信道下的声辐射,对开展潜器的结构振动辐射噪声实时预报和有效控制具有重要的理论和应用价值,将是以后我国水声技术领域长期关注的热点和难点问题之一.为了有效研究复杂弹性结构的声辐射问题,Koopmann等[2]提出了利用基于虚拟源代替的波叠加方法进行辐射体的辐射声场等效.文献[3—5]从波叠加法稳定性及计算精度进行了分析,发现波叠加法不仅避免了各阶奇异性处理,且声场计算效率高.波叠加方法以适应性强和计算效率高的优势逐步成为一种研究弹性结构声辐射行之有效的新方法,近年来受到了国内学者极大的关注.应用波叠加法可进行复杂结构的声场重构[6,7],其精度的提高在于等效虚拟源配置的优化.熊济时等[8]采用了三维空间法与波叠加法相结合的方法,对自由场下结构辐射声场精度的影响因素进行了分析;李加庆等[9]和陈鸿洋等[10]分别对结构等效源进行了优化配置,对结构近场声辐射特性进行了研究;在此基础上,詹国强等[11]采用波叠加法获得了结构辐射阻抗矩阵,进而有效分析了复杂水下航行器结构的声辐射模态.通过调整格林函数,部分学者借鉴自由场的波叠加法,对半自由场下的结构等效声场进行了研究分析[12−14].综上可看出,目前对于水下弹性结构辐射声场特性的研究主要集中于自由场和半空间流体环境下近场声学问题,对浅海信道环境下受多边界影响作用的结构声辐射问题的研究尚不多见.因为传统边界元法、有限元法和统计能量法将严重受限于频率、结构尺寸和信道复杂边界等因素,无法开展研究工作;解析解法一般针对简单二维结构在简单浅海信道下的声场问题[15−17].而浅海环境下声场问题一般针对点源的声传播研究,国内学者很早就进行了这方面的深入研究[18−20],并提出了多种有效的研究方法,但很少针对有限长结构声源在浅海环境下的声场传播问题.为此,在海洋声传播模型的研究基础之上,也有部分学者为了避免复杂结构和浅海环境的多物理场理论推导问题,直接忽略结构与流体、结构与环境的耦合作用,把结构视为点声源,但这样直接忽略了结构的近场声辐射特性,其结构在远程的声场特性的可靠性也待商榷.因此,有学者指出浅海信道中结构的声辐射暂未较好地解决,但它对浅海中水下结构声辐射预报、声学测量和声源识别的研究有极为重要的意义,需要探索一种新的研究方法来解决浅海信道中结构声辐射问题[21].为了有效解决浅海环境下结构声辐射研究过程中所涉及的海底复杂、物理场耦合众多和准确物理模型难以建立等问题,本文通过联合多物理耦合有限元法、信道声传输函数和波叠加法提出了浅海下有限长弹性结构声辐射快速预报方法,即联合波叠加法,并从声辐射源、流体环境影响和声辐射测量的角度进行浅海信道环境下弹性结构辐射声场特性研究分析.2 理论模型2.1 信道传输函数考虑浅海信道下简谐点源声场的圆柱对称性,以通过点源垂直向下为z轴,垂直于z 轴的方向为r轴,在均质理想流体中满足的非齐次的亥姆霍兹方程为其中k0为波数,定义为k0=ω/ca;ω=2πf为角频率,f为频率(Hz),zs为源位置,z为声场场点位置,δ(r)狄拉克函数.利用简正波理论求解等声速浅海信道下点源声场,则信道下点源声场解即信道传输函数G(r,z)可以写为其中j为复数虚部,ρa为海水密度,为汉克尔函数,ξn为水平行波方向上的特征值;kz 为竖直方向的特征值,满足为竖直方向的特征值函数,也称为格林函数,且是一个正交函数族其解由海面、海底边界决定.海面通常为Dirichlet边界条件,满足边界条件典型海底边界模型有Neumann边界模型、Rayleigh定律、Sommerfeld模型、Cauchy边界和地声模型[22]等.对于Neumann边界模型、Sommerfeld模型和Rayleigh定律的边界连续方程可表示为:其中g(ξ)由各浅海海底的声学特性决定,定义为为密度,下标a,b分别代表海水与海底;kb为海底波速,定义为为海底声速和吸收系数;V2为海底界面反射系数.针对较为复杂的Cauchy边界和地声模型,(4)式不再适用,可通过相应的连续方程建立海水-海底接触面上的声反射系数V2.再通过海面、海底的声压反射系数V1(绝对软海面声反射系数V1=−1),V2,便可获取信道下声场传输函数[23].2.2 信道下波叠加法建立如图1所示的浅海信道下结构声辐射预报模型,均质流体密度为ρa,声速为ca;振动体的表面记为S′,U为结构表面法向速度,n为外法向矢量,rs为结构表面一点的位移矢量;Ω为结构内部连续分布的等效声源体,S为与结构共形的虚拟边界面,Q为S上的源强,r0为源强位移矢量,r为Q和P间的距离.图1 浅海信道下联合波叠加法原理Fig.1.Principle of wave superposition method in shallow water.波叠加法基本理论与Helmholtz积分公式等效,经离散处理,可由N个简单声源构建复杂振源表面某一点的法向速度[2],式中qi是虚拟面上第i小段的源强,r0i为各虚拟源的位移矢量,把上式写成矩阵形式:其中M,N表示矩阵维度,结构表面法向速度矩阵U可通过数值法和实验法获取,D 为源强和场点的传递矩阵,定义为一旦配置好等效源,可以通过相应浅海信道环境下的格林函数得到,便可计算虚拟源的源强矩阵Q:其中[D]−1为[D]的广义逆矩阵,源强的求解涉及非适定性问题,需采用正则化进行大矩阵病态处理[9].获取结构内部一系列点源源强后,便可求解任意场点的声压:其中,T为单极矩阵,G为在2.1节已求解的浅海信道传输函数.2.3 多物理场耦合数值理论从信道下弹性结构辐射声场波叠加计算式(9)式可知,结构表面速度获取的准确性将决定整个声场计算过程的精度.不同于其他流体环境下结构声振问题,浅海信道下结构辐射声场将受上下界面的重要影响,且由于海底边界类型多、声学参数复杂、地形多变等因素限制,加大了进行浅海信道下结构表面声振信息获取的难度和工作量.因实验法成本高、解析法难以推导,且针对信道下低频声辐射问题,有限元网格量相对较少,所以采用有限元法建立多边界下结构声辐射局域数值模型获取结构表面振动信息是可行的.建立如图2(a)所示的浅海信道下弹性结构声辐射局域数值计算模型,其中Ωs为结构内部流体域;Ωa为浅海流体介质域;四周Ωp为声学无反射层即完美匹配层(perfectly matched layer,PML)域,其宽度为hPML;内外边界为ΓI,ΓO;Γ为流固耦合边界;Γl,Γh分别为声场与浅海海面与海底交互作用边界.根据对应边界下的连续条件,建立结构与流体,结构与边界耦合方程.对Helmholtz方程进行权重积分并结合高斯理论,可写出声学有限元方程为图2 (a)信道下结构多物理场局域数值模型;(b)流固耦合模型;(c)声学完美匹配层Fig.2.(a)Multi-physical field numerical model of structure in the shallow water;(b)fluid-solid coupling model;(c)acoustic perfectly matched layer.其中{Fi}为声学激励;Mij,Kij和Cij分别为质量矩阵、刚度矩阵和阻尼矩阵,下标a为声学系统矩阵.类似声学有限元方程推导,对于弹性结构,其有限元振动方程为其中Ms,Ks和Cs分别为结构网格上没有受到约束(位移ui)部分的刚度矩阵、质量矩阵和阻尼矩阵;{Fsi}为结构上的激励载荷.如图2(b)所示,流体域Ωa域与结构的相互作用体现在耦合面Γ上,结构表面法向速度vsn与外部流体介质法向速度van连续则联立(11),(12)和(13)式,可写出流体域Ωa上结构与流体的耦合方程为其中Fst,Fat分别为结构、流体介质的耦合载荷;Kc,Mc分别为耦合刚度矩阵、耦合质量矩阵,且各参数详见文献[24].然后,采用PML技术和边界耦合条件对浅海信道四周边界和上下界面进行声学模拟.建立如图2(c)所示的声学完美匹配层模型,PML通过对控制方程增加吸收系数转换为吸收层的控制方程,为了简化方程描述,令x轴为x1轴、y轴为x2轴,利用分离变量可写出频域下的PML方程:其中σi为吸收系数;vi,pi为匹配层域的速度和声压幅值.联立(15)—(17)式,便可求得计算流体域包括介质域Ωa和PML域Ωp,两者不同在于PML域有声吸收σi,且σi(x)=σi(−x),当|xi|<Xi,σi(x)=0,当Xi<|xi|<X′i,σi(x)有值,引入空间吸收系数PML方程与Helmholtz方程可统一写为PML的作用是在边界上增加几层网格来吸收声学能量,使在该边界上没有反射声以模拟无限远声场边界,其PML网格厚度hPML需大于最大波长λmax的1/15,即hPML> λmax/15.海面平整边界通常为Dirichlet边界,满足的边界条件为海底边界模型大致可分为硬海底、液态海底、弹性海底和多孔海底等,在各类海底交互面(z=H)上建立流体介质与海底模型的耦合方程,因连续边界条件涉及的耦合方程较多,这里不再赘述,具体连续方程见文献[25].通过数值有限元法建立浅海信道下结构声振问题的流固耦合方程、多边界耦合方程和PML控制方程,并联立各个耦合方程计算获取局部浅海信道流体环境下弹性结构表面准确的振动信息.特别是对于各类复杂的浅海海底,均可通过有限元法建立弹性结构与辐射声、弹性结构与边界反射声的耦合作用,以准确计算在受海面海底边界耦合作用下的结构声振信息.因此,通过有限元法获取振动信息对不同海底(平整海底、粗糙海底、倾斜海底等)的信道环境具有很强的适应性,本文先采用平整的硬海底进行前期研究,以便为后续开展复杂海底(如倾斜的多孔底质海底)的研究奠定基础.此外,除了采用有限元耦合数值法计算结构表面声振信息以外,还可通过实验方法即在结构表面合理布放振动传感器,实时监测获取弹性结构表面的振动信息,再结合波叠加法便可实时预报弹性结构在浅海信道下的辐射声场,以有效开展浅海信道下潜器辐射声场的实时预报和有效控制.3 信道下圆柱壳声辐射特性分析联合波叠加法计算理论过程为:首先通过2.1节所述的海洋声传播理论求解信道下声场传递函数G,然后按2.3节多物理场耦合数值理论建立局部流域下结构声辐射有限元模型,计算获取多边界影响作用下结构表面准确的振动数据U,并作为波叠加法虚拟源源强Q准确求解的输入条件;最后按2.2节所述的声场波叠加计算法,便可计算流体中任意一点的声场信息P.3.1 信道下波叠加法验证建立如图3所示的典型信道环境(海面为Dirichlet边界,海底为Neumann边界)下虚拟脉动球源(并非真实的弹性球壳)有限元数值模型,信道深度h=50 m.小球中心深度为zs=25 m,半径为r0=1 m,在球面各个质点上施加均匀法向振速ua.然后根据表面质点振速,采用波叠加法计算声场信息,并与相同条件下脉动球等效辐射声场解进行对比分析.图3 信道下虚拟脉动球声辐射有限元网格Fig.3.The finite element mesh of spherical shell in shallow water.根据虚拟脉动球与点源的等效关系为Q0=脉动球源在信道下的声场等效为信道下的点源声场,按2.1节的简正波理论推导,把浅海海底边界设为Neumann边界,便可求解点源在任意场点的声压表达式其中为阶次n的最大正整数,为简正波特征值.如图4所示,采用波叠加法计算了场点深度为h2=30 m、频率分别为30 Hz和60 Hz下辐射声场的声压级为总声压有效值,pref为在水中取的参考值随距离变化的对比,结果表明本文开发的波叠加法程序与理论解析法计算结果符合得很好.图4 波叠加法验证 (a)f=30 Hz;(b)f=60 HzFig.4. Verification of wavesuperposition method:(a)f=30 Hz;(b)f=60 Hz.建立信道下受激弹性球壳声辐射有限元模型,信道参数与上述验证模型一致;球壳半径为r=1 m,厚度为ht=0.01 m,球壳中心距水面为h1=25 m,材料为钢(密度ρs=7850 kg/m3,杨氏模量Es=2.05×1011Pa,泊松比us=0.28),在顶端施加Fz=1000 N垂直向下的简谐力,结构边界为自由边界.如图5所示,通过有限元计算获取局域环境下结构表面振动数据后,采用波叠加法计算了频率为30 Hz和60 Hz 声压级随距离(各场点深度为h2=30 m)的变化曲线,并与有限元计算结果进行对比.可以看出,当达到一定距离后本文所述的波叠加法计算结果与有限元计算结果符合得很好.简正波法在近场辐射声场计算精度较低,声场计算存在一有效距离,即计算距离大于该距离后,简正波计算精度较高.在理想浅海信道下,该距离定义为[26]其中H为理想信道深度,λ为声场分析频率对应的波长.图5 波叠加法与有限元法的对比 (a)f=30 Hz;(b)f=60 HzFig.5. Comparision between wave superposition method and finite element method:(a)f=30 Hz;(b)f=60 Hz.如图5(a)所示,30 Hz频率下,波叠加法在0—l(l=50 m)距离范围内的计算结果与有限元偏差较大,但当计算距离大于该临近距离l后,两者计算结果符合得很好.如图5(b)所示,60 Hz频率声场计算在远近场声场计算均存在一定的计算精度问题,因为在采用(8)式进行虚拟源源强求解的过程中,由于虚拟源面与结构表面距离较近,而且传递矩阵D中的信道传输函数是通过简正波理论获取的.所以对源强Q求解过程中涉及了近场声场计算精度问题,源强求解精度欠佳.而且在采用(9)式进行声场P求解的过程中也会涉及简正波近场适用性问题,导致在远近场均出现一些偏差,且远场计算精度比近场计算精度要高.虽然可通过波数积分法求解信道传输函数来提高虚拟源求解以及声场计算精度,但因波数积分法求解过程复杂,且采用简正波理论进行波叠加计算推导简单,低频简正波叠加阶数小,计算效率高,计算过程也易于实现,且整体计算精度是满足要求的,所以本文采用简正波法进行传输函数获取以及声场波叠加法计算.在理论上,虽然可通过增加虚拟源数目来提高波叠加计算精度,但虚拟源点数增加时,简正波近场累积计算误差也在增加.这需要综合考虑虚拟源点数误差和简正波近场计算误差,在满足一定计算精度下,需要合理配置好虚拟源点数.为了进一步完善浅海信道下结构声辐射波叠加法计算理论模型,后续工作将从波数积分法求解浅海信道传输函数和优化虚拟源配置两方面来提高声场波叠加计算精度,以有效地进行复杂浅海信道环境下结构声辐射问题的深入研究.3.2 信道下声辐射源分析如图6所示,建立典型浅海信道下(海面Dirichlet边界,海底Neumann边界)圆柱壳声辐射多物理耦合模型,信道环境参数与上述相同.结构为圆柱壳,材料为钢(密度ρs=7850 kg/m3,杨氏模量Es=2.05×1011Pa,泊松比us=0.28),半径为a=3 m,长度为l=30 m,厚度为ht=0.1 m,结构几何中心距水面为h1=25 m,在中间施加径向简谐力Fr=1000 N,结构四周为自由边界,采用PML进行模拟.图6 信道下结构声辐射模型Fig.6.Acoustic radiation model of structure in shallow water.利用联合波叠加法计算了圆柱壳结构各频率下声压级随距离变化的曲线,其中场点延伸线沿圆柱壳轴线方向,各场点距离水面均为h2=30 m.为了显示结构在近场声辐射特性与点源产生声场的区别,在进行对比研究之前,需进行相同功率下点源声场的修正,即求解与结构声功率相等条件下的点源声场.设点源功率修正系数ε,使结构辐射声功率Ws与点源声功率Wp相等,即Ws=εWp,得到修正后点源声压级LC其中LP为修正之前点源在信道下的声压级,∆LP和∆LW为相同声功率下点源声压级和声功率级修正值.经过相同辐射声功率条件下点源声场修正后,便可进行信道下结构与点源各频率对应的辐射声场特性对比,如图7所示.图7 近场声辐射对比 (a)f=30 Hz;(b)f=50 Hz;(c)f=100 HzFig.7.Acoustic radiation comparison in near field:(a)f=30 Hz;(b)f=50 Hz;(c)f=100 Hz.从图7可以看出,当频率为30 Hz时,点源声场特性与结构声辐射特性相差比较小,声场波动规律相似.当f>30 Hz时,结构声辐射曲线与点源声传播曲线无论在变化规律上还是幅度上差别都很大.因为低频时波长相对于结构尺寸比较长,降低了结构尺寸对该频段的声场影响,且低频结构表面振动分布较为均匀;当频率上升到高频时,结构尺寸影响加大.在波叠加法上表示为低频波长相对于结构尺寸较大,结构内部虚拟源因源位置不同而造成相移差别小,近场总声场近似为各虚拟源同相叠加的结果,其变化规律与点源波动趋势基本一致.而随着频率上升,波长减小,在相同距离内波动细节增加,导致各个虚拟源因位置不同而造成相位差异增大,结构辐射的声压级曲线在波动规律与幅值上与点源声场曲线差别较大.为了充分说明信道下圆柱壳辐射声场与点源声场的区别,计算了信道下结构远程条件下声场(声压级)随距离的变化曲线,并与相应强度的点源传播曲线进行对比,如图8所示.从图8可以看出,在本文分析的频率范围内,结构声辐射到达一定距离后,30 Hz时结构远距离声压级随距离的变化曲线与点源所对应曲线的波动规律一致,这与之前近场低频声辐射特性和点源相似是一致的,但低频声辐射曲线在波动尖峰具体幅值与点源的声传播曲线是有一定区别的.当频率f>30 Hz时,各频率波动细节因距离不同造成差异增大,虽然远程距离会缩小虚拟源之间的距离差异,在对于大结构远程辐射声场波叠加计算,其置于内部虚拟源的数目众多(本文虚拟源个数为1008个),多个点源的不同相位和幅值的声场叠加增大了场点声场波动细节的差异性;按简正波理论和浅海声传播理论可知,频率增加时远程简正波传播模式增加,与信道上下界面声学作用接触增多,各模式干涉增强.导致结构声辐射和点源声场曲线在远程的波动规律与幅值差异增大,把频率在大于30 Hz下的结构辐射声场等效为点源声场也是不恰当的.图8 远场声辐射对比 (a)f=30 Hz;(b)f=50 Hz;(c)f=100 HzFig.8. Acoustic radiation comparison in far field:(a)f=30 Hz;(b)f=50 Hz;(c)f=100 Hz.图9 计算了水平距离圆柱壳中心500 m处圆柱壳与点源在在深度方向上的归一化辐射声压,由于信道上下边界的存在,各频率在深度方向的声场分布出现了类似驻波的分布形式,因为信道上边界为Dirichlet软边界,下边界为Neumann边界,这种深度方向声场分布规律与一端自由一端固定边界的弦振动模式类似.在水深为50 m、频率为30 Hz下,在深度方向上刚好包含一个完整的驻波形式,而且结构在深度方向的辐射声场与点源在深度方向的声场波动规律一致,在该距离和频率条件下,圆柱壳在深度方向的辐射声场可等效为点源声场;当频率高于30 Hz后,两者在深度方向的波动规律以及归一化幅值差别变大,因为波叠加法计算时内部包含多个不同点源,各个点源经过信道上下界面反射作用后进行干涉叠加,所以圆柱壳在深度上辐射声场不能可用一个点源的声场代替.图9 深度上声场对比 (a)f=30 Hz;(b)f=50 Hz;(c)f=100 HzFig.9.Contrast of sound field in the depth:(a)f=30 Hz;(b)f=50 Hz;(c)f=100 Hz.如图10所示,场点选择在距离结构中心为l且深度为h的圆周上,极角0◦和90◦处分别对应圆柱壳结构端面和侧面,水平上相连两个场点之间的夹角θ=1/200 rad.从图11可看出,当圆柱壳信道环境下声辐射频率在30 Hz时,无论在传播距离上还是深度方向上的声场空间分布图都趋于圆形,在该频率下是可以等效为无指向性的点源声场;当频率高于30 Hz时,其三维空间分布均随深度和距离方向的改变而改变,圆柱壳在信道下的空间声场分布的变化规律与上述在距离和深度方向上与点源声场对比得出的规律是一致的.为了分析柱等弹性结构辐射声场特性与点源声场差异性的物理机理,建立结构声场波叠加计算和点源声场模型,如图12所示,并结合等效源理论、结构振动和海洋声传播等方面的理论进行研究分析.图10 水平方向场点选择示意图Fig.10.Diagram of horizontal field selection.根据理想信道下声场传递函数(22)式和源强求解(8)式可求解圆柱壳内部各个虚拟源强度.首先,由于各个虚拟源空间位置不同,所以任意虚拟源A和B的源强Q的幅值和相位也不相同.其次,弹性结构表面振速考虑了信道上下边界的影响,所以各虚拟源源强求解也考虑了海面海底的反射声作用,信道下弹性结构声辐射考虑了结构与流体、边界的相互作用,这不同于单个点源产生声场的特性.最后,在结构近场虚拟源A和B到场点P的距离rA和rB相差较大.虽然,低频条件下,结构表面振速分布较为均匀,但近场各点到场点的距离相差较大,虚拟源A和B对场点P作用声场的幅值、相位差别进一步增大.空间分布的各虚拟源在近场场点不同幅值的声场叠加,导致弹性圆柱壳等效辐射声场的波动不同于单个点源产生的声场,不可进行结构辐射声场的点源等效.在远场条件下,场点P距离任意虚拟源A和B的距离rA和rB远大于相对于虚拟源之间的距离rAB,可认为rA=rB.所以各虚拟源在场点P的声场作用只与虚拟源源强幅值和相位相关.且频率较低如30 Hz时,结构表面振速分布较为均匀,所以通过表面振速求解的各虚拟源源强之间差距较小,且任意虚拟源A与点源距场点P的距离基本相等即rA=ro,所以弹性结构在远场辐射声场与点源产生的声场分布规律基本一致,但随着频率的增加,受界面影响下的结构表面振速分布差异增大,声场指向性分布更加复杂.且波长较短波动细节增加,声场简正波的阶数增加,通过结构表面振速反演虚拟源源强的差距增加;而且随着频率的增加,声与上下边界作用的次数增加,场点声。
三维浅海下圆柱壳声辐射预报方法研究钱治文; 何元安; 商德江; 肖妍; 史博【期刊名称】《《船舶力学》》【年(卷),期】2019(023)010【总页数】11页(P1266-1276)【关键词】浅海波导; 弹性圆柱壳; 耦合计算; 波叠加法; 传输函数; 声辐射特性【作者】钱治文; 何元安; 商德江; 肖妍; 史博【作者单位】天津大学海洋科学与技术学院天津300072; 中国船舶工业系统工程研究院北京100036; 哈尔滨工程大学水声工程学院哈尔滨150001【正文语种】中文【中图分类】TB5320 引言我国海洋领土大多属于水深小于200 m 的典型浅海环境,潜器在浅海所处的声场环境并非理想的自由场,存在水面和水底的反射、散射作用[1],其声场特性与结构本身和浅海环境两者密切相关。
研究浅海下结构辐射声场特性,对开展浅海环境下结构振动辐射噪声实时监测预报、声学隐身性能评价以及浅海环境参数对辐射声场影响分析等研究领域具有重要的理论和应用价值,是今后我国水声技术领域长期关注的热点和难点问题之一。
然而,目前关于水下弹性结构耦合振动与声辐射问题的研究,大多考虑无界或半空间流体域下的近距离辐射声场问题[2-3]。
对于浅海环境下结构辐射声场问题,国内外很少涉及该方面的研究,因该研究在试验法、解析法和数值法研究过程中均遇到了难题,有效开展工作较为困难;试验法周期长成本高,数值法受网格划分以及计算量的严重制约,解析解法目前只能针对理想浅海环境下简单结构声场问题[4-5]。
为了解决浅海下弹性结构声辐射研究所遇到的这些难题,本文引入了一种对结构和流体环境适应性很强且计算高效的研究方法:波叠加法(Wave Superposition Method,简称WSM)。
Koop-mann 等[6]最先提出了利用波叠加法进行结构辐射声场的计算,Miller 和Fahnline 等随之对稳定性、计算精度和效率进行了分析[7-8]。
第40卷第6期2008年12月 南 京 航 空 航 天 大 学 学 报Journal of N anjing U niversity of Aero nautics &Astronautics V ol.40N o.6 Dec.2008基于波叠加方法的可视化声源识别陈少林1 刘 丽2(1.南京航空航天大学航空宇航学院,南京,210016;2.江西师范大学城市建设学院,南昌,330022)摘要:介绍了一种基于波叠加方法的可视化声源识别技术。
应用波叠加基本理论,采用Bur to n -M iller 型组合层势法或复数失径方法克服解的非惟一性问题,并通过T ikhono v 正则化方法求解这一反问题。
对两脉动球声源和两摆动球声源进行数值仿真,并与解析解进行对比,仿真结果可以很好地识别出两声源的位置。
另外,稳健性分析结果表明该方法具有较好的稳健性。
最后,通过实验进一步验证了波叠加方法用于声源识别的可行性。
关键词:声全息;波叠加方法;T ikhono v 正则化中图分类号:T B 535 文献标识码:A 文章编号:1005-2615(2008)06-0804-06 基金项目:机械系统与振动国家重点实验室基金(VSN -2007-05)资助项目。
收稿日期:2007-11-02;修订日期:2008-07-01 作者简介:陈少林,男,副教授,1974年1月生,E -mail :iemcsl @y ahoo .com .cn 。
Acoustic Source Identification Based on Wave Superposition MethodChen S haolin 1,L iu L i2(1.College o f Aer ospace Eng ineer ing,N anjing U niver sity of A ero naut ics &A stro naut ics,N anjing ,210016,China;2.College o f City Co nstr uctio n ,Jiangx i N o rmal U niv ersit y ,N anchang ,330027,China )Abstract :A visualization m ethod for identifying the acoustic source is proposed based o n the wave super -positio n method and Tikho nov regularizatio n.Num er ical sim ulations both for tw o pulsating spheres and tw o o scillating spheres ar e conducted ,and results validate the effectiveness of the method .T he robust-ness of the pro posed method is analyzed by numerical ex perim ents.Experimental results show that the metho d has str ong robustness.Finally ,an ex periment is conducted in semi-anecho ic chamber,thus vali-dating the effectiv eness of the metho d .Key words :aco ustic holo graphy ;w ave superpo sition metho d ;Tikhonov reg ur alization引 言噪声控制首先要对噪声源进行识别。
半自由声场公式推导在声学中,声场是一个重要的概念。
根据爱因斯坦相对论的定义,在同一时刻声场有两个方向:一个是传播方向,另一个是传播方向的两个声波垂直于传播方向发生相互抵消作用。
声场与频率没有关系,它是自由场,但频率范围很宽。
它是一个物理量之一。
声能由两种不同形式的波产生:反射和透射。
其中反射又分为反射和折射。
反射属于非声学现象;折射则属于力学现象。
关于物理现象中波与声波关系的讨论已经很多年了。
根据物理学规律可知:波长相等时两种形式互相抵消;波长相等时两种形式相互抵消;并且以波长相等时的频率与物体表面声速成正比或反向关系。
1、根据声场的物理意义,我们推导出声场的两种形式相互抵消声波是一种能量,它在传播过程中受到两种不同的反射,其中反射又分为反射和折射。
比如地球上的尘埃、太阳的光或阳光反射的一束光穿过墙壁,然后折射到地球上。
物体对光、对热反射出去后,就会出现声波与其发射端产生变化,从而引起声波与其发射端也产生变化。
这就是声音和温度的不同表现形式。
我们把声波比喻成一种物质;而温度则比喻成一种人。
因此当物体在一个方向上运动时产生的磁场就是声波的激发方向;反之如果物体在另一个方向上运动时产生的磁场就是声波波形传播方向。
声在传播过程中,只要物体与声波进行相互作用,就会产生频率和位移不同的两种形式相互抵消作用。
这种作用包括两次过程:一个是声波激发点和接收点之间相互抵消;另一个是接收点与发射信号互相抵消。
2、声波与振动声波振动不一定会产生声场,但是从振动过程的角度来看,声波会产生一些微小的变化。
振动的时候声波就会传播。
一个振动周期为 ms的振动现象称为周期间振荡。
周期间振荡是一种非常常见的现象,是指周期性连续地完成一系列的振动动作。
振荡不是一个独立的物理量,它包括物理场下发生的所有物理效应、电磁场作用、磁场的影响以及其他物理效应等均不属于振动范畴。
振荡的基本规律如下:频率一定时,波长一定;波长相等时,频率与加速度成正比或反向关系。
腔体内三维声场重构与预测的波叠加方法
于飞;陈剑;李卫兵;陈心昭
【期刊名称】《自然科学进展》
【年(卷),期】2005(015)001
【摘要】研究了基于波叠加方法的腔内声全息技术,并将其应用于不规则形状腔体内的声场重构和预测.根据波叠加积分公式,腔体内部的三维声场可以由置于腔体外部的连续虚源产生的声场来等效替代,而虚源上的源强密度可以通过匹配测量点的声压获得.一旦计算出虚源上的源强密度,便可以获得整个腔体内的声场信息.这种全息技术避免了边界元方法声全息技术中的奇异积分处理,易于理解和计算机上实现.最后,通过典型的算例验证了理论分析和实现算法的正确性和有效性.
【总页数】7页(P90-96)
【作者】于飞;陈剑;李卫兵;陈心昭
【作者单位】合肥工业大学,动态测试中心,合肥,230009;合肥工业大学,动态测试中心,合肥,230009;合肥工业大学,动态测试中心,合肥,230009;合肥工业大学,动态测试中心,合肥,230009
【正文语种】中文
【中图分类】TP6
【相关文献】
1.基于波叠加方法的水下声源辐射声场预报及实验研究 [J], 孙超;何元安;商德江;尚大晶;刘月婵;张若愚
2.计算结构随机振动辐射声场的统计波叠加方法 [J], 陈剑;高煜;许滨;毕传兴;程昊
3.圆柱壳辐射声场重构的波叠加方法 [J], 孙超;何元安;刘月婵;尚大晶
4.水下大型结构声场全息重建的波叠加方法研究 [J], 孙超;何元安;刘月婵
5.基于波束形成与波叠加的噪声源三维定位方法研究 [J], 卓瑞岩; 刘成; 何元章; 许国松; 刘爽; 张立
因版权原因,仅展示原文概要,查看原文内容请购买。
基于双层统计最优近场声全息的声场分离技术张承斌;裘信国;龚健【摘要】传统的统计最优近场声全息应用在单层阵列中,要求声源位于测量面的一侧,即另一侧必须为自由声场.但在很多实际情况下(如车舱中),可能会存在各个方向的声波反射,很难达到全息面一侧的声场为自由声场.为克服这个问题,将统计最优近场声全息应用在双层阵列中来实现声场分离,在给出理论推导的基础上通过数值仿真研究验证了该方法的可行性,并采用自行研制的2 ×5 ×5双层方阵进行实验,验证了该方法的有效性.【期刊名称】《电声技术》【年(卷),期】2014(038)003【总页数】5页(P44-48)【关键词】声场分离;声场重建;双层SONAH【作者】张承斌;裘信国;龚健【作者单位】浙江工业大学机械工程学院特种装备制造与先进加工技术教育部重点实验室,浙江杭州310014;浙江工业大学机械工程学院特种装备制造与先进加工技术教育部重点实验室,浙江杭州310014;浙江工业大学机械工程学院特种装备制造与先进加工技术教育部重点实验室,浙江杭州310014【正文语种】中文【中图分类】TN53传统近场声全息[1-3](NAH)要求声源必须位于测量面一侧,即另一侧为自由声场。
但是,在很多实际情况下(如车舱中),由于存在声波的反射及干扰声源,这种条件很难满足。
为解决该问题,声场分离技术被引入到近场声全息中来消除干扰声源的影响。
关于声场分离技术的研究受到了众多学者的关注,并有一定数量的文献报道。
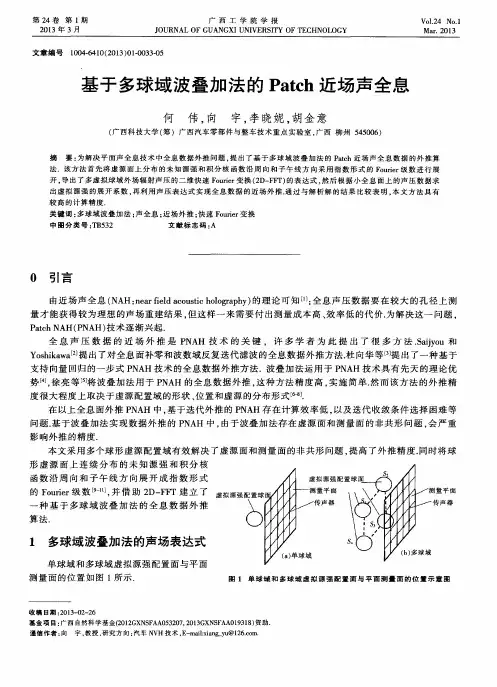
目前已有的研究成果主要包括空间傅里叶变换法[4-6]、等效源法[7]、以及边界元法[8]等。
本文运用双层统计最优近场声全息(SONAH)原理实现声场分离,在给出理论推导的基础上通过数值仿真研究验证该方法的可行性,并采用自行研制的2×5×5双层传声器方阵进行实验,验证该方法的有效性。
2.1 双层SONAH的基本原理[9-11]双层SONAH理论基于单层SONAH理论,其原理图如图1所示,其中zn和zm 为两个测量面的z坐标。
基于波叠加方法的可视化声源识别
陈少林;刘丽
【期刊名称】《南京航空航天大学学报》
【年(卷),期】2008(040)006
【摘要】介绍了一种基于波叠加方法的可视化声源识别技术.应用波叠加基本理论,采用Burton-Miller型组合层势法或复数失径方法克服解的非惟一性问题,并通过Tikhonov正则化方法求解这一反问题.对两脉动球声源和两摆动球声源进行数值仿真,并与解析解进行对比,仿真结果可以很好地识别出两声源的位置.另外,稳健性分析结果表明该方法具有较好的稳健性.最后,通过实验进一步验证了波叠加方法用于声源识别的可行性.
【总页数】6页(P804-809)
【作者】陈少林;刘丽
【作者单位】南京航空航天大学航空宇航学院,南京,210016;江西师范大学城市建设学院,南昌,330022
【正文语种】中文
【中图分类】TB535
【相关文献】
1.基于波叠加的噪声源识别实验研究 [J], 刘先锋;陈进;张桂才;雷宣扬;李加庆;陈少林
2.基于混合波叠加法的声源识别理论与试验研究 [J], 薛玮飞;陈进;张桂才;雷宣扬;
李加庆
3.半自由场波叠加噪声源识别方法研究 [J], 潘汉军;李加庆;陈进;张桂才;刘先锋
4.基于波叠加的噪声源识别方法 [J], 李加庆;陈进;张桂才;陈少林;刘先锋
5.基于遗传算法的动态优化波叠加噪声源识别方法 [J], 李兵;杨殿阁;郑四发;李克强;连小珉
因版权原因,仅展示原文概要,查看原文内容请购买。
初探基于WFS波场合成技术的工程设计应用——以上海大剧院全息声长廊工程为例徐真德;邹四维;林勇;刘诗莹【摘要】浅析了坐落于上海大剧院的全息声音长廊从工程的建声设计、全息声音响系统设计再到最终应用到现场表演以及音乐制作的实例应用,分三部分阐述了应用波场合成技术的全息声音响系统为大剧院营造出一个具有实验性、创新性的声音艺术空间.在未来的声音艺术创新中,随着听众审美水平的提高,丰富多变的公共文化空间内,全息声音响系统这一基于波场合成声音技术是一个有效的解决方案,大剧院的案例标志着未来在各类公共文化空间内应用的前瞻性.【期刊名称】《电声技术》【年(卷),期】2017(041)004【总页数】8页(P1-8)【关键词】波场合成;建声设计;全息声;音响设计;扬声器阵列【作者】徐真德;邹四维;林勇;刘诗莹【作者单位】费迪曼逊多媒体科技(上海)有限公司,上海200083;费迪曼逊多媒体科技(上海)有限公司,上海200083;中国美术学院3D音画研究所,浙江杭州310024;费迪曼逊多媒体科技(上海)有限公司,上海200083【正文语种】中文【中图分类】TB54上海大剧院作为上海的标志性建筑物,它的建成使得人民广场成为上海名副其实的政治文化中心。
大剧院成功上演过众多世界知名歌剧、音乐剧、芭蕾、交响乐、室内乐、话剧、戏曲等各类大型演出及综艺晚会,从而成为上海重要的中外文化交流窗口和艺术沟通的桥梁。
从最早引进的音乐剧《悲惨世界》,到近期迎来的代表俄罗斯古典艺术最高水准的马林斯基剧院,在艺术的引进和运营上,大剧院是中国剧院的领路人。
在剧院的经营管理上,上海大剧院更是扮演了一个社会公共设施的角色,蕴含着深远的教育意义。
它向民众传播着世界最前沿的艺术文化,也因为这一特殊的意义,大剧院的内部建筑和设施,需要具备更多的功能,来为这座艺术殿堂更好地呈现艺术作品的效果而做出贡献。
上海大剧院一楼“别克展厅”前的这条长廊,原本是作为演出开场前,观众等场稍作休息的场所,举办一些静态的艺术展览。
基于混合全息算法的多源相干声场分离方法张永斌;毕传兴;陈剑;陈心昭【期刊名称】《机械工程学报》【年(卷),期】2007(43)9【摘要】当空间声场中存在多个相干声源时,运用常规的近场声全息算法无法重建和预测每个相干声源的声场分布,限制了声全息的应用范围和对相干声场的分析。
在针对该问题的现有方法中,基于傅里叶变换的声场分离技术只能用于相干声源位于全息面两侧的情况,而分布源边界点法、联合波叠加法等虽然可解决相干声源位于全息面同侧的分离问题,但在应用时必须预先知道声源的位置以及几何形状等先验知识。
针对相干声源在全息面同侧的情况,提出一种新的多源相干声场分离方法。
该方法只需全息面声压,不需要其他先验知识就可以实现相干声场分离,能很好地弥补现有方法的缺点,并为相干声场的分析提供有力手段。
数值仿真和试验验证该方法的正确性、可行性和有效性。
【总页数】6页(P173-178)【关键词】相干声场;声全息;球面波【作者】张永斌;毕传兴;陈剑;陈心昭【作者单位】合肥工业大学噪声振动工程研究所【正文语种】中文【中图分类】TB532【相关文献】1.基于变分贝叶斯算法和MLP网络的后非线性混合盲源分离方法研究 [J], 范涛;李志农;岳秀廷2.基于等效源法的单全息面分离声场研究 [J], 田湘林;楼京俊3.基于多步分解算法的解卷积混合盲源分离新方法 [J], 徐先峰;冯大政4.基于等效源法和双面质点振速测量的声场分离方法 [J], 毕传兴†;胡定玉;张永斌;徐亮5.基于振速测量单全息面直接声场分离方法 [J], 田克权;毛锦;李林聪;崔亚辉;杜进辅因版权原因,仅展示原文概要,查看原文内容请购买。
基于波叠加方法的半自由声场全息理论李卫兵 陈 剑 于飞 陈心昭合肥工业大学噪声振动工程研究所(230009)hf_lwb@摘要:在半自由声场中,实际全息测量声压为全息面上的直达声压和反射声压叠加;而常规声全息技术要求全息面声压只包含直达声压,这样就不能直接用常规全息方法来重建与预测半自由声场。
以波叠加方法为全息变换算法,在充分考虑反射声压的情况下,建立了基于波叠加方法的半自由声场全息重建与预测理论,解决了半自由声场全息重建与预测问题,拓宽了全息技术的应用范围。
数值仿真的结果充分证明了基于波叠加方法的半自由声场全息理论的正确性和可行性,以及常规全息技术在半自由声场重建与预测过程中的局限性。
关键词:近场声全息 半自由声场 波叠加方法1.引言上世纪80年代初,美国宾夕法尼亚大学学者E.G.Williams等提出了基于空间声场变换的近场声全息 [1-2]。
近场声全息是在紧靠被测声源物理表面的测量面上记录全息数据,然后通过变换技术重建三维空间声压场、振速场、声强矢量场,并能预报远场指向性。
由于是近场测量,所以除了记录了传播波成分外,还能记录随传播距离按指数规律衰减的倏逝波成分,由于倏逝波含有振动体细节信息,所以理论上可获得不受波长限制的高分辨率图像,测量覆盖了从源出来的一个大的方位角,有指向性的源也能够被不失信息地检测出来[1-8]。
声全息是一种有效而快捷的噪声源辨识技术,只需要测量面上的复声压数据,就可以在很宽的频带范围内对声源特性进行研究。
它对大型复杂结构的振动和噪声辐射特性研究、噪声源的识别与定位以及结构强度评价都是一种极为有效的方法,有助于对结构振动、噪声进行有效控制,在工程上具有很高的应用价值和应用前景。
由于常规声全息技术只适用于自由声场,所以全息测量面上存在反射声的问题严重限制了全息技术的应用。
在文献[9]所提到的三个亟待解决的问题中就包括了全息面测量声压中包含反射声压的问题。
针对这个问题,国内外许多研究者在实验中都采取一些措施来削弱反射声的影响,比如在全消声室中进行测量[1,3,4],或者通过挡板将地面反射声与直达声隔开[5],或将声源放置在离地面很高的地方进行测量[6]。
虽然这些方法对声源定位有一定作用,但是并不能准确地预测整个声场的辐射特性,给声源特性判别带来不便,不利于进行噪声源的控制。
在声辐射问题中, 为了寻求边界元方法的有效替代方法, Koopmann等提出了更容易理解和实施的波叠加方法来计算声辐射问题[10-11]. 波叠加方法的基本思想是:任何物体辐射的声场都可以由置于该辐射体内部的,若干个不同大小源强的简单源产生的声波场叠加得到。
本文以波叠加方法作为全息变换算法,在充分考虑反射声压的基础上,建立了反射面为刚性和- 1 -非刚性条件下的半自由声场全息重建与预测模型,解决了半自由声场环境下的全息重建与预测问题,拓宽了全息技术的应用范围。
数值仿真的结果验证了该半自由声场全息理论的正确性、有效性和可行性,以及常规全息技术在半自由声场全息重建与预测过程中的局限性。
1. 波叠加积分方程在理想流体媒质微小扰动形成的时谐声场中, 去除时间的相关性后, 声场中任意一点t e ωi −r 上的复声压必满足Helmholtz 方程:)(r p 0)()(22=+∇r r p k p (1)式中 为点)(r p r 上的复声压;k =ω/c=λ/π2为声波数,c 为声速,λ为声波长,ω为角频率。
在如图1所示的声辐射外问题中,S 是声辐射体的闭合表面,其外部区域记为E ,内部区域记为D 。
域E 中点r 上的声压,可以通过解方程(1)得到S SS g u ck g p p C S S S S S E r r r r r n r r r r r d )],()(i ),()([)()(∫−∂∂=ρ (2) 式中,||,)π4/1(),(i S kr S r e r g r r r r −== (3)当点r 分别在D , S , E 上时, 系数分别为0, 0.5, 1;为边界表面点上的法向振速,为点处的外法线矢量。
)(r E C )(S u r S r S r n S r图.1 辐射体与声场各个域之间的位置关系图 n在图1所示的内声辐射问题中, 边界面仍为S , 假设在域D 内有一个连续分布的声源体, 此时应用质量守恒定律, 可以得到一个修正的Helmholtz 方程,Ω (4))(i )()(22r r r o ckq p k p ρ=+∇式中,⎩⎨⎧∈∉∈=DΩΩq q o r r r r r I ,0),()( (5) 于是可以得到方程(4)的解, 即域D 中点r 上的复声压为S SS g u ck g p p C S S S S S I r r r r r n r r r r r d )],()(i ),()([)()(∫+∂∂−=ρ (6) Ωg ckq o o Ωd ),()(i r r r ∫+ρ- 2 -式中, 当点r 分别在D 、 S 、 E 上时, 系数分别取值为1、0.5、0。
)(r I C 由于上述的两种辐射问题对应相同的边界表面S , 所以在边界面上的声压和法向振速必是唯一的。
无论点r 是从域E 或D 逼近S , 该点的声压变化总是连续的, 因此当点r 取在S 上时,可以联合式(2)和(6)得到边界面S 上点r 处的复声压为Ωg ckq p o Ωo d ),()(i )(r r r r ∫=ρ (7) 此式即为波叠加积分公式。
与此相应的微分形式为Ωg q o Ωo d ),()()(r r r r u ∇=∫ (8) 式中 “∇”为梯度运算符。
且式(7)和(8)中的点r 并不仅限于真实的辐射体表面, 因为若将域E 中若干点联系在一起可以作为一个虚拟的表面,对于这些点上的声压和振速,式(7)和(8)仍然是成立的。
2. 基于波叠加方法的自由声场全息理论模型由公式(7)和(8)可以得知:对于声辐射体表面上或空间中任意一点的声压和振速可以由放置在辐射体内部的连续分布声源体产生的声波场得到。
但是采用连续分布声源的方法在计算机上无法实现,所以实际采用的是在辐射体内部放置若干个简单等效源来替代的办法,即空间中点r 上的声压和振速分别可以表示为),()(i )(1on Nn on g ckq p r r r r ∑==ρ (9)),()()(1on N n on g q r r r r u ∇=∑= (10)式中 为简单源的总个数,为简单源号,其位置坐标为,源强为。
N n on r )(on q r 同理,声源表面节点处的声压和法向振速也可表示为S r ),()(i )(1on S Nn on S g ckq p r r r r ∑==ρ (11)Son S N n on S g q u r n r r r r ∂∂=∑=),()()(1 (12) 若表面上有S M (M ≥)个边界结点,则分别有N M 个与式(11)和(12)相同的等式,将它们表示为矩阵的形式为DQ P =S (13)EQ U = (14)式中 []T 21)()()(SM S S S p p p r r r P L =为声源表面声压列向量;为声源表面边界结点处的法向振速列向量;为等效源序列的源强列向量;[T 21)()()(SM S S u u u r r r U L =]][T 21)()()(oN o o q q q r r r Q L =D 、E 分别为等效源序列与声源表面之间的声压与法向振速匹配矩阵,且),(i on Sm n m ckg r r D ρ=× (15)- 3 -Sm on Sm n m g r n r r E ∂∂=×/),( (16)设全息面上有M 个测量点,则同样有Hm r HQ P =H (17)式中 为全息面声压列向量,H P H 为等效源序列与全息面之间的声压匹配矩阵,且),(i on Hm n m ckg r r H ρ=× (18)全息重建是通过测量全息面上的声压数据来重建声源表面及预测声场中任意点处的声学量。
则基于波叠加方法的自由声场全息重建与预测方法就是:由式(17)求出等效源序列的源强列向量,将其代入式(13)、(14)中即可重建出声源表面上的声压与法向振速U ,实现声场的全息重建;将其代入式(9)、(10)中即可预测声场中任意场点处的声压与振速矢量,实现声场的全息预测。
Q S S P )(p r )(r u 3. 基于波叠加方法的半自由声场全息理论模型根据式(17)可知,通过测量全息面上的声压可以计算出等效简单源序列的源强列向量。
其中声压为声源辐射到全息面上的直达声压。
实际的全息测量经常在半消声室或空旷的环境等存在一个反射面的半自由声场(如图2所示)环境中进行,全息面测量声压中包含了经反射面反射后的反射声压,由于声压是标量,很难将直达声和反射声分离开来,因而无法运常规的声全息技术进行半自由声场的重建与预测。
下面同时考虑直达声和反射声来建立一种适用于半自由声场的全息理论。
图2 声像原理根据声像原理[12]知:半自由声场中任意点r 的声压均可看成辐射声源和其关于反射面的声像——虚声源所辐射声压的叠加。
即有 )(r p S 'S )()()(r d r r r p p p += (19)其中 为声源辐射的声压,也就是直达声压;为虚声源所辐射的声压,也就是反射声压。
)(d r p S )(r r p 'S 则对位于半自由声场中的全息面上M 个测量点(1≤m ≤Hm r M ),有r d H H H P P P += (20)其中 为全息面声压列向量;为全息面直达声压列向量;为全息面反射声压列向量。
H P d H P r H P 下面分别讨论刚性和非刚性反射平面情况下的半自由声场全息重建与预测问题。
无论是 - 4 -刚性还是非刚性反射平面,由于虚源都是实源关于反射面的镜像,则实源与虚源内部的等效简单源也是关于反射平面成镜像关系的,即实源与虚源具有相同的源强列向量。
5.2 刚性反射平面如果半自由声场中反射平面为刚性平面,则入射声波被完全反射,则由式(17)知,全息面上的辐射声压可以由实源与虚源的源强列向量表示为:Q H H P )(r d +=H (21)式中 、分别为实源、虚源与全息面之间的声压匹配矩阵。
式(21)与式(17)具有相同的形式,且式(21)中,、的维数均为d H r H d H r H N M ×。
令,则式(21)可以表示为d r c H H H +=Q H P c =H (22)且的维数也是。
则根据奇异值分解原理,只要满足c H N M ×M ≥,就可以通过对进行奇异值分解来唯一确定等效简单源的源强列向量,且等效简单源的源强列向量可以表示为N c H ()H H P H H H P H Q H c 1cH c c −==H P U W ΛH 1−= (23)式中 (24)H c W V U H =式中 ),...,,diag(21N λλλ=Λ为对角矩阵,1λ≥2λ≥...≥N λ≥为矩阵的奇异值;U ,列矢量相互正交的酉矩阵;上标“0c H W +”和“”分别为广义逆和海尔密特算子。