液压系统回路设计
- 格式:doc
- 大小:486.00 KB
- 文档页数:8
液压回路设计与组装实验一、液压回路设计的基本原理液压回路是指通过液体作为传动介质来实现机械运动的系统,其基本原理是利用液体在密闭管路中传递压力和能量。
液压回路设计的基本原理包括:选择合适的工作介质、确定工作条件、设计系统结构和选择合适的元件。
二、液压回路设计流程1. 确定工作条件首先需要明确所需完成的工作任务,包括工作负载、运动速度、加速度等参数,以此来确定所需的油缸行程和推力大小,并根据推力大小来选择合适的泵和电机功率。
2. 设计系统结构根据所需完成的工作任务,设计出相应的系统结构。
主要包括:泵站、控制阀组、油缸组及其它辅助元件。
其中,泵站是整个系统中最重要的部分,它提供了所需的油流量和压力。
3. 选择合适元件在设计液压回路时需要选择合适的元件,包括泵、阀门、油缸等。
其中,泵是最重要的元件之一,其类型有很多种类可供选择;阀门则决定了液压回路的控制方式和工作效率;油缸则是实现工作任务的关键元件。
三、液压回路组装实验步骤1. 确定实验目的首先需要明确实验目的,以此来确定所需的元件和工具。
2. 准备工具和材料根据所需完成的实验任务,准备好所需的工具和材料。
主要包括:泵、阀门、油缸、管路、油箱等。
3. 组装泵站将泵与电机连接起来,并将其放置在油箱上方。
然后将进口管道与油箱连接,出口管道与控制阀组连接。
4. 组装控制阀组根据设计图纸将各个控制阀门组合起来,并将其与泵站相连。
5. 组装油缸组根据设计图纸将各个油缸组合起来,并连接到控制阀组上。
6. 连接管路根据设计图纸依次连接各个元件之间的管路,保证系统密封性良好。
7. 填充液体并试运行在完成液压回路组装后,需要填充液体并进行试运行。
在试运行过程中需要检查系统是否正常运行,并根据需要进行调整。
四、液压回路组装实验注意事项1. 在组装过程中需要遵循安全操作规程,注意防止液体泄漏和高压伤害。
2. 在选择元件时需要保证其质量可靠,以免影响实验结果。
3. 在组装过程中需要按照设计图纸进行操作,保证系统结构合理。
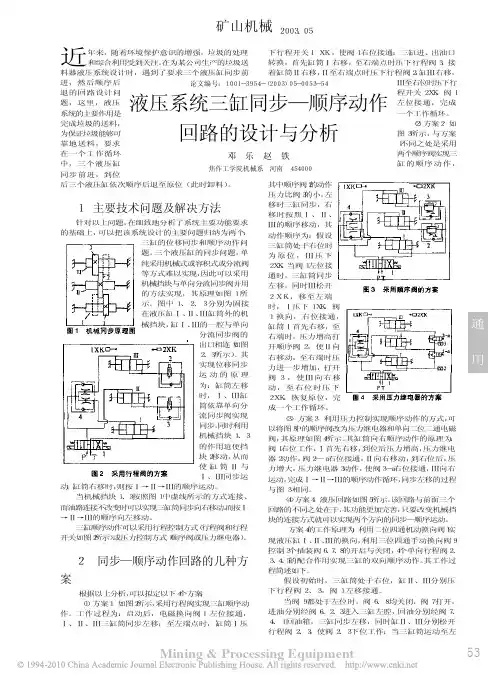
Mining & Processing Equipment 53近年来,随着环境保护意识的增强,垃圾的处理和综合利用受到关注。
在为某公司生产的垃圾送料器液压系统设计时,遇到了要求三个液压缸同步前进,然后顺序后退的回路设计问题,这里,液压系统的主要作用是完成垃圾的送料,为保证垃圾能够可靠地送料,要求在一个工作循环中,三个液压缸同步前进,到位后三个液压缸依次顺序后退至原位(此时卸料)。
1 主要技术问题及解决方法针对以上问题,在细致地分析了系统主要功能要求的基础上,可以把该系统设计的主要问题归纳为两个:单因此可以采用1所分别为固接Ⅲ缸筒外的机分流同步阀的出口相连(如图2、3所示)。
其实现位移同步运动的原理为:缸筒左移时,Ⅰ、Ⅲ缸筒依靠单向分流同步阀实现同步,同时利用机械挡块1、3的作用迫使挡块2移动,从而使缸筒Ⅱ与Ⅰ、Ⅲ同步运动;缸筒右移时,则按Ⅰ→Ⅱ→Ⅲ的顺序运动。
当机械挡块1、3按照图1中虚线所示的方式连接、而油路连接不改变时可以实现三缸筒同步向右移动,而按Ⅰ→Ⅱ→Ⅲ的顺序向左移动。
三缸顺序动作可以采用行程控制方式 (行程阀和行程开关如图2所示)或压力控制方式(顺序阀或压力继电器)。
2 同步—顺序动作回路的几种方案根据以上分析,可以拟定以下4个方案:(1) 方案1如图2所示,采用行程阀实现三缸顺序动作。
工作过程为:启动后,电磁换向阀1左位接通,Ⅰ、Ⅱ、Ⅲ三缸筒同步左移;至左端点时,缸筒Ⅰ压下行程开关1XK,使阀1右位接通;三缸进、出油口转换,首先缸筒Ⅰ右移,至右端点时压下行程阀3,接着缸筒Ⅱ右移,Ⅱ至右端点时压下行程阀2,缸Ⅲ右移,Ⅲ至右位时压下行程开关2XK,阀1左位接通,完成一个工作循环。
(2) 方案2如图3所示,与方案1不同之处是采用两个顺序阀实现三缸的顺序动作,其中顺序阀2的动作压力比阀3的小,左移时三缸同步,右移时按照Ⅰ、Ⅱ、Ⅲ的顺序移动,其动作顺序为:假设三缸筒处于右位时为原位,Ⅲ压下2XK,当阀1左位接通时,三缸筒同步左移,同时Ⅲ松开2XK,移至左端时,Ⅰ压下1换向,右位接通,缸筒Ⅰ首先右移,右端时,开顺序阀2右移动,力进一步增加,阀32X成一个工作循环。
液压系统设计计算有的液压系统简单,有的液压系统复杂。
这是由负载的工艺要求决定的。
我们在这里介绍的液压系统是简单的开关型液压系统,也即普通液压系统,不是伺服或者电液比例液压系统。
关于伺服或者电液比例液压系统,我们以后再研究。
我公司原有一台工程油缸试验台,采用的是高低压泵合流。
额定流量为100升,系统额定最高压力为31.5MPa。
为了突出重点,便于叙述,适当做了一些简化。
一液压基本回路一个实用的液压系统原理图都是由液压基本回路组成的。
液压基本回路可以在机械设计手册,或者其他液压设计资料中查到。
1 液压基本回路的分类设计资料中介绍的液压基本回路分类很详细。
但总括起来无非是,泵-电机组,压力控制回路,流量控制回路,方向控制回路和执行机构。
参看图1油缸试验台液压原理图。
在图1中,电机M1 Y112M-4和斜盘柱塞泵10YCY14-1B,电机Y160M-4和叶片泵YB1-80,组成泵-电机组,为系统提供动力;先导卸荷阀③,安全溢流阀④,电磁溢流阀⑤,组成压力控制回路;电液换向阀⑥和先导式液控单向阀⑦,组成方向控制回路。
一般说来,流量控制往往会伴随着压力的损失。
例如,在薄壁节流小孔中,流量d Q C A = (1) 此公式的使用条件为0.5l d≤。
式中Q —经过薄壁小孔的流量,3/m s ;d C —薄壁小孔流量系数,对于紊流,0.600.61d C = ; 0A —孔口面积,2m ; ρ—流体的密度,3/kg m ; p ∆—压力差,12p p p ∆=−,Pa ;d —小孔的直径,m ; l —小孔的长度,m 。
这种压力能损失往往转化为热能,使液压系统升温。
在理论上,变量泵不会因为流量或压力的变量产生能量损失。
2 液压基本回路的联结液压基本回路,特别是液压元件,在液压原理图中的联结,要么是并联,要么是串联。
二 液压系统原理图1 液压系统原理图应该包括的的基本内容一个符合要求的液压原理图除了表示系统外,还应该包括两个基本内容:液压元件明细表和电磁铁动作顺序表。
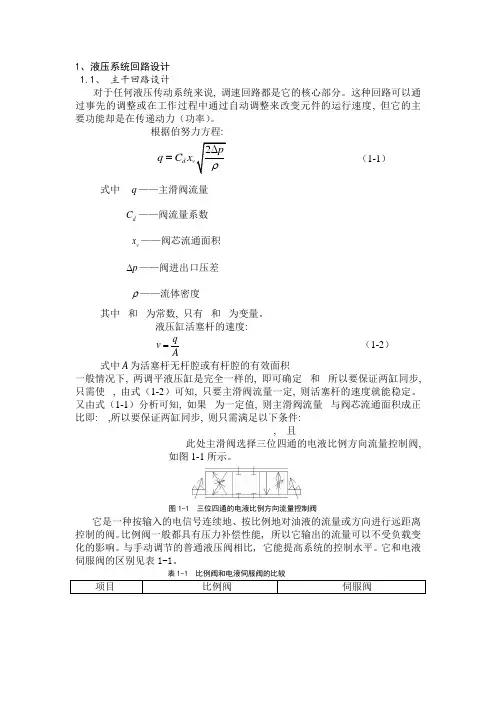
1、液压系统回路设计1.1、 主干回路设计对于任何液压传动系统来说, 调速回路都是它的核心部分。
这种回路可以通过事先的调整或在工作过程中通过自动调整来改变元件的运行速度, 但它的主要功能却是在传递动力(功率)。
根据伯努力方程: 2d v p q C x ρ∆= (1-1)式中 q ——主滑阀流量d C ——阀流量系数v x ——阀芯流通面积p ∆——阀进出口压差ρ——流体密度其中 和 为常数, 只有 和 为变量。
液压缸活塞杆的速度:q v A= (1-2) 式中A 为活塞杆无杆腔或有杆腔的有效面积一般情况下, 两调平液压缸是完全一样的, 即可确定 和 所以要保证两缸同步, 只需使 , 由式(1-2)可知, 只要主滑阀流量一定, 则活塞杆的速度就能稳定。
又由式(1-1)分析可知, 如果 为一定值, 则主滑阀流量 与阀芯流通面积成正比即: ,所以要保证两缸同步, 则只需满足以下条件:, 且此处主滑阀选择三位四通的电液比例方向流量控制阀,如图1-1所示。
图1-1 三位四通的电液比例方向流量控制阀它是一种按输入的电信号连续地、按比例地对油液的流量或方向进行远距离控制的阀。
比例阀一般都具有压力补偿性能, 所以它输出的流量可以不受负载变化的影响。
与手动调节的普通液压阀相比, 它能提高系统的控制水平。
它和电液伺服阀的区别见表1-1。
表1-1 比例阀和电液伺服阀的比较项目 比例阀 伺服阀低, 所以它被广泛应用于要求对液压参数进行连续远距离控制或程序控制, 但对控制精度和动态特性要求不太高的液压系统中。
又因为在整个举身或收回过程中, 单缸负载变化范围变化比较大(0~50T), 而且举身和收回时是匀速运动, 所以调平缸的功率为, 为变功率调平, 为达到节能效果, 选择变量泵。
综上所可得, 主干调速回路选用容积节流调速回路。
容积节流调速回路没有溢流损失, 效率高, 速度稳定性也比单纯容积调速回路好。
为保证值一定, 可采用负荷传感液压控制, 其控制原理图如图1-2所示。
第8卷第4期浙江工贸职业技术学院学报V ol.8No.42008年12月JOURNAL OF ZHEJIANG INDUSTRY&TRAD E VOCATIO NAL COLLEG E Dec .2008液压回路设计缺陷及改进郑秀丽王文深(浙江工贸职业技术学院,浙江温州325003)摘要:本文介绍了液压回路常见的一些设计缺陷,对故障的原因进行了简要的分析归纳,并提出了改进的措施,目的是使读者对液压设备进行设计时能做到最合理,能避免一些常见的错误。
关键词:液压回路;设计缺陷;改进中图分类号:TH122文献标识码:A 文章编号:1672-0105(2008)04-0057-04Disadvanta ges of Hydr aulic Cir cuit Design and Its I mpr ovementZheng Xiuli,Wang W enshin(Zhejiang Industry &Trade V ocational College,W enzhou Zhejaing 325003)Abstract:This paper introduces some disadvantages of hydraulic circuit and also analyzes the reasons for it.Countermeansures are proposed to make readers understand about the rationality of hydraulic pressure design.Key words:Hydraulic circuit,Design disadvantages;Improvement液压技术在机械行业中是比较新的技术,在现代工业中得到越来越广泛的应用。
但是由于液压回路设计上的缺陷,使液压设备达不到预定要求甚至不能正常工作。
回路设计缺陷是先天性的,比较难于彻底消除。
液压回路设计图的原理液压回路设计图是液压系统的一个重要组成部分,用来描述液压系统中各个元件的安装位置、管路连接方式以及控制方式。
液压回路设计图可以帮助工程师有效地设计和安装液压系统,实现系统的自动化控制、运动控制等功能。
液压回路设计图的原理包括以下几个方面:1. 回路结构原理:液压回路设计图需要根据实际使用需求,确定回路的结构和元件的布置。
一般来说,液压回路可以分为功力传递回路、控制回路和保护回路。
回路的结构主要包括元件的选型、布置和连接方式。
在设计回路结构时,需要考虑液压系统的工作压力、流量以及信号传递等因素。
2. 元件的选型原理:液压回路设计图中的元件是实现液压系统功能的关键部分。
选型原理涉及到元件的类型、规格、特性等方面。
在选型时,需要考虑元件的工作压力、流量范围、交流或直流电源、是否使用中间容器等因素。
同时,还需考虑元件的可靠性、性能指标、制造商的信誉等因素。
3. 管路连接原理:液压回路设计图中管路连接是实现元件之间油流传递的关键环节。
管路连接原理主要包括布局方式、管路直径的选取、连接方式的选择等方面。
在设计时,需要考虑油液流动的阻力、压力损失、噪声等因素。
合理的管路连接可以保证液压系统的正常运行和高效工作。
4. 控制方式原理:液压回路设计图中的控制方式是实现液压系统自动化控制的关键环节。
控制方式原理主要包括手动控制、自动控制、比例控制和逻辑控制等方面。
在设计时,需要考虑控制的准确性、可靠性、响应速度等因素。
不同的控制方式适用于不同的工况和要求。
5. 安全保护原理:液压回路设计图中的安全保护是为了保证系统的安全和可靠运行。
安全保护原理主要包括过载保护、过热保护、泄漏保护、压力传感器和温度传感器等方面。
在设计时,需要考虑系统的安全工作范围和保护机制,合理设置保护装置和传感器,以提高系统的运行安全性。
总之,液压回路设计图的原理涉及液压系统的结构、元件选型、管路连接、控制方式和安全保护等方面。
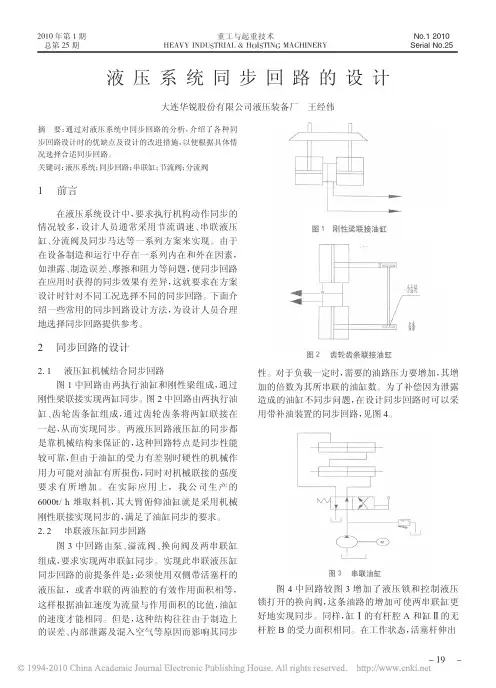
摘要:通过对液压系统中同步回路的分析,介绍了各种同步回路设计时的优缺点及设计的改进措施,以便根据具体情况选择合适同步回路。
关键词:液压系统;同步回路;串联缸;节流阀;分流阀1前言在液压系统设计中,要求执行机构动作同步的情况较多,设计人员通常采用节流调速、串联液压缸、分流阀及同步马达等一系列方案来实现。
由于在设备制造和运行中存在一系列内在和外在因素,如泄露、制造误差、摩擦和阻力等问题,使同步回路在应用时获得的同步效果有差异,这就要求在方案设计时针对不同工况选择不同的同步回路。
下面介绍一些常用的同步回路设计方法,为设计人员合理地选择同步回路提供参考。
2同步回路的设计2.1液压缸机械结合同步回路图1中回路由两执行油缸和刚性梁组成,通过刚性梁联接实现两缸同步。
图2中回路由两执行油缸、齿轮齿条缸组成,通过齿轮齿条将两缸联接在一起,从而实现同步。
两液压回路液压缸的同步都是靠机械结构来保证的,这种回路特点是同步性能较可靠,但由于油缸的受力有差别时硬性的机械作用力可能对油缸有所损伤,同时对机械联接的强度要求有所增加。
在实际应用上,我公司生产的6000t/h 堆取料机,其大臂俯仰油缸就是采用机械刚性联接实现同步的,满足了油缸同步的要求。
2.2串联液压缸同步回路图3中回路由泵、溢流阀、换向阀及两串联缸组成,要求实现两串联缸同步。
实现此串联液压缸同步回路的前提条件是:必须使用双侧带活塞杆的液压缸,或者串联的两油腔的有效作用面积相等,这样根据油缸速度为流量与作用面积的比值,油缸的速度才能相同。
但是,这种结构往往由于制造上的误差、内部泄露及混入空气等原因而影响其同步性。
对于负载一定时,需要的油路压力要增加,其增加的倍数为其所串联的油缸数。
为了补偿因为泄露造成的油缸不同步问题,在设计同步回路时可以采用带补油装置的同步回路,见图4。
图4中回路较图3增加了液压锁和控制液压锁打开的换向阀,这条油路的增加可使两串联缸更好地实现同步。
机械工程基础实验油缸液压回路设计与组装实验实验报告书班级:学号:姓名:实验时间:月日,第大节成绩:教师签名:重庆理工大学重庆汽车学院实践教学及技能培训中心2012年3月交报告时间为实验完成后的七天内,例如,实验时间为周三,交报告时间最迟不得迟于第二周周三下午5点。
实验前完成相关预习报告并接受实验教师的提问和检查,且必须带上指导书和报告书;否则不得参加实验预习题(实验前必须完成):1、本实验的实验目的和要求是什么?使用哪些实验器材?2、复习常用液压元件的相关知识,画出液压泵、溢流阀、节流阀、单向阀、二位三通电磁换向阀、三位四通电磁换向阀、的符号,并说明溢流阀、节流阀、单向阀、调速阀的在液压回路中所起的功能和作用。
3、绘制基本油路图:1)液压站基本回路2)换向回路3)节流阀调速回路(三种)4)差动回路5)卸荷回路4、(主观题)参考相关资料:(1)设计一个液压系统的动作循环(不能与指导书的范例相同或相似)(2)根据设计的动作循环,设计油路图。
要求使用到2、3题的液压元件和回路。
问答题1.说明三位四通电磁换向阀的P、T、A、B口的作用,通过本次实验,你知道如何判断三位四通电磁换向阀的P、T、A、B口,请用图示的方法详细说明判断方法。
2.本实验中使用了五通,五通的作用是什么?3.按规范画出本实验中设计的油路图,并对油路进行解释说明。
4.(主观题)通过本次实验,你在下面几个方面有何体会和收获:1)设计和组装一个液压系统,其步骤和方法是怎样的?2)通过本次实验课后,说明如何实现你的设计方案 (可再次修改你在预习题中的设计) ,包括:对油路功能的说明,液压元件的选择,油路安装步骤等(不仅限于这3个方面)。
3)通过这堂课,你有何收获?对本实验的教学有何建议?。
1、液压系统回路设计
1.1、 主干回路设计
对于任何液压传动系统来说,调速回路都是它的核心部分。
这种回路可以通过事先的调整或在工作过程中通过自动调整来改变元件的运行速度,但它的主要功能却是在传递动力(功率)。
根据伯努力方程: 2d v p q C x ρ∆= (1-1)
式中 q ——主滑阀流量
d C ——阀流量系数
v x ——阀芯流通面积
p ∆——阀进出口压差
ρ——流体密度
其中d C 和ρ为常数,只有v x 和p ∆为变量。
液压缸活塞杆的速度:
q v A
= (1-2) 式中A 为活塞杆无杆腔或有杆腔的有效面积
一般情况下,两调平液压缸是完全一样的,即可确定1121A A =和1222A A =所以要保证两缸同步,只需使12q q =,由式(1-2)可知,只要主滑阀流量一定,则活塞杆的速度就能稳定。
又由式(1-1)分析可知,如果p ∆为一定值,则主滑阀流量q 与阀芯流通面积成正比即:v q x ∞,所以要保证两缸同步,则只需满足以下条件:
11p c ∆=,22p c ∆=且12v v x x =
此处主滑阀选择三位四通的电液比例方向流量控制阀,如图1-1所示。
图1-1 三位四通的电液比例方向流量控制阀
它是一种按输入的电信号连续地、按比例地对油液的流量或方向进行远距离控制的阀。
比例阀一般都具有压力补偿性能,所以它输出的流量可以不受负载变化的
影响。
与手动调节的普通液压阀相比,它能提高系统的控制水平。
它和电液伺服阀的区别见表1-1。
所以它被广泛应用于要求对液压参数进行连续远距离控制或程序控制,但对控制精度和动态特性要求不太高的液压系统中。
又因为在整个举身或收回过程中,单缸负载变化范围变化比较大(0~50T),而且举身和收回时是匀速运动,所以调平缸的功率为P Fv
=,为变功率调平,为达到节能效果,选择变量泵。
综上所可得,主干调速回路选用容积节流调速回路。
容积节流调速回路没有溢流损失,效率高,速度稳定性也比单纯容积调速回路好。
为保证p∆值一定,可采用负荷传感液压控制,其控制原理图如图1-2所示。
它主要利用负荷传感和压力补偿技术,可用单泵(或一组泵)驱动多个执行元件,各执行元件运动速度仅依赖于各节流阀开启度,而与各执行元件的负载压力和其它执行元件的工作状态无关。
即使当泵的输出流量达不到实际需要时,各执行元件运动速度的比例关系仍然可以得到保持。
此系统的这一特有的独立调速功能大大减少了作业中操纵者协调各执行元件动作所花费的时间,不但显著提高了作业效率,而且有效减轻了操作者的劳动强度。
另外,能够以最节省能量的方式实现调速,系统无溢流损失,并以推动执行元件动作所需的最低压力供油。
在工作间隙(发动机不停机,各执行元件处于无载状态,不动作),系统自动调节泵的排量到最小值。
可以有效降低功率损耗、减小液压系统的温升,所以它是一种性能较好的新型液压系统。
一般的同步回路还有:机械连接同步回路;用分流阀或分流集流阀的同步回路;用调速阀的同步回路;串联缸的同步回路等,但这些同步回路同步精度一般比较低,而且大多数只是保证速度同步而不能保证位置同步,受负载变化的影响较大。
图1-2 LS 同步控制系统原理图
图中两个执行元件中的最高压力,可以通过单向阀选出,作为负荷传感压力LS P 分别引到负荷传感阀和各压力补偿阀的弹簧腔。
当负荷传感阀芯及各压力补偿阀芯达到平衡时,各节流口前压力1p 为负荷传感压力LS P 加上负荷传感阀下腔弹簧压力KL p ; 各节流口后压力2p 均为负荷传感压力LS P 加上压力补偿阀左腔弹簧压力KC p ,两节流口压力差为:
12KL KC p p p p p ∆=-=-
可知,p ∆只与两弹簧弹力有关,所以只要保证两弹簧压力差恒定,则p ∆值基本为一定值。
因而通过各节流口流向执行元件的流量与各节流口大小有关,而与每一执行元件的负载压力无关。
为保证桅杆工作时的垂直度,选用一种倾角传感器,将检查到的角度偏差信号转换成电信号,控制电液比例方向流量控制阀,从而调节桅杆的垂直度。
组干回路如图1-3所示。
图1-3 主干回路
1、2 其它回路选择
1、平衡回路
平衡回路的功用在于防止垂直或倾斜放置的液压缸和与之相连的工作部件因自重而自行下落。
桅杆后仰和前倾时都要平衡,因此连接油缸两端的回油路上都要设有起平衡作用的阀。
下面主要考虑两种平衡回路,分别如图1-4和1-5所示。
图1-4 用直控平衡阀的平衡回路
用直控平衡阀的平衡回路。
调整平衡阀的开启压力,使其稍大于立式液压缸活塞及其工作部件自重在液压缸下腔所产生的压力,活塞部件则不会因自重而下落。
活塞下降时,运动平稳,但功耗较大。
图1-5 用远控平衡阀平衡的回路
用远控平衡阀平衡的平衡回路。
远控平衡阀的开启取决于控制压力,与载荷无关。
在活塞下行时,平衡阀被控制油打开,被压很小,故系统效率较高。
但活塞部件有可能加速下滑,以致产生振荡,所以应在平衡阀的控制口接入节流阀。
2、锁紧回路
锁紧回路的功用是在液压执行元件不工作时切断其进、出油通道,确切地使是它保持在既定的位置上。
下面也主要考虑两种锁紧回路,如图1-6和1-7所示。
图1-6 用换向阀锁紧的回路
用换向阀锁紧的回路。
三位四通换向阀在中位时,分别与油缸相连的两油路被封闭,构成了双向锁紧回路。
采用换向阀锁紧,回路简单,但是锁紧精度较低。
图1-7 用液控单向阀双向锁紧的回路
用液控单向阀双向锁紧的回路。
用两个液控单向阀可实现对液压缸的双向锁紧。
图示位置时,液压泵卸荷,两个液控单向阀均为关闭,活塞被所在不动。
活塞可以在任意位置被锁紧。
考虑桅杆的功能要求:由于桅杆自身重力的作用,举身过程要比较平稳,而且在任意位置要能被锁定,所以被压阀的压力值要设得比较小;工作是也要很好的被锁住;前倾是也要平稳和能被锁住,所以被压阀值要设得比较大。
再考虑
到平衡和锁紧的功能,可以使用液控平衡阀来同时实现这两个作用。
其原理如图1-8所示。
图1-8 用液控平衡阀的平衡锁紧回路
举身过程中,开始时桅杆自重对液压缸的压力比较大,进油路压力很大,所以回油路上的被压值很小,随着举身过程的进行桅杆自重对缸的压力减小,回油路上的被压值也随着增加。
前倾过程中,进油路上压力值很小,所以回油路上的被压值特别大,收回过程和此分析相反。
要锁紧时可以可以用换向阀切断进油路,从而靠平衡阀直接锁住。
1、3 液压回路综合
把上面选出的各种回路组合画在一起,再经过修改、整理后,可得到总的液压系统原理图,如图1-9所示。
图1-9液压系统原理图
1-负荷传感变量泵 2-单向阀 3-三位四通电液比例换向阀 4-平衡阀 5-单向阀
6-梭阀 7-负荷传感阀 8-压力切断阀 9-压力补偿阀 10-滤油器。