78KOS使用说明举例程序单次脉冲输出
- 格式:pdf
- 大小:1.81 MB
- 文档页数:50

脉冲输出功能利用FP0的高速计数器功能,可以实现两路脉冲信号的输出。
并且,若以FP0的专用指令,可实现定位控制、梯形升降速控制、原点返回和点动等功能。
概述●利用FP0的脉冲输出功能,可以控制脉冲串输入形式的电机驱动器,来实现定位控制。
●指令F168能够根据设置的初始速度、最大速度、加/减速时间以及目标值,自动输出所要求的脉冲,实现梯形升降速的定位控制。
●F168指令也能实现自动回原点功能。
●利用指令F169,可以实现点动(JOG)的脉冲输出。
设置系统寄存器当使用脉冲输出功能时,应将相应通道(CH0或CH1)的系统寄存器No.400和No.401设置为“不使用高速计数器”。
设置方法请参考“7.4.3的系统寄存器表”。
F168 位置控制(梯形控制/原点返回)根据设定的参数,从特定的输出点(Y0或Y1)输出特定形式的脉冲信号。
编程举例:相应的寄存器表A:可使用N/A:不可使用说明:●若控制标志(Control flag)(R903A或R903B)为OFF,且控制触点(如R0)为ON状态时,则从指定的输出点(Y0或Y1),按照数据表给定的参数输出一个特定形式的脉冲串。
●数据表用于指定位控运动的控制码、起始速度、最大速度、加速/减速时间或目标值等。
●根据加/减速时间,输出频率从起始速度升到最大速度。
●相应的数据区见下表:●在脉冲输出的过程中,可通过重写目标值,来输出更多的脉冲。
运行模式说明:●增量模式<相对值控制>根据目标的设置设定值,来输出相应脉冲数的脉冲。
将控制码(Control code)设置为H02(即:增量模式;正向:OFF;反向:ON),当目标值为正时,方向信号输出为OFF,同时高速计数器的当前值增加。
当目标值为负时,方向信号输出为ON,同时高速计数器的当前值减少。
当控制码(Control code)设置为H03时,方向信号输出则和前述情况的相反。
●绝对模式〈绝对值控制〉根据当前值和目标值的设置不同,输出脉冲(当前值与目标值之差为输出的脉冲数)。
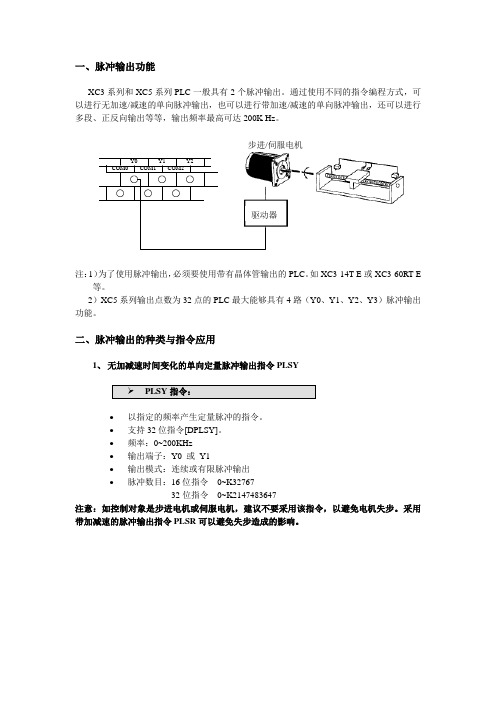
一、脉冲输出功能XC3系列和XC5系列PLC 一般具有2个脉冲输出。
通过使用不同的指令编程方式,可以进行无加速/减速的单向脉冲输出,也可以进行带加速/减速的单向脉冲输出,还可以进行多段、正反向输出等等,输出频率最高可达200K Hz 。
Y0COM0Y1COM1Y2COM2注:1)为了使用脉冲输出,必须要使用带有晶体管输出的PLC 。
如XC3-14T-E 或XC3-60RT-E等。
2)XC5系列输出点数为32点的PLC 最大能够具有4路(Y0、Y1、Y2、Y3)脉冲输出功能。
二、脉冲输出的种类与指令应用1、 无加减速时间变化的单向定量脉冲输出指令PLSY∙ 以指定的频率产生定量脉冲的指令。
∙ 支持32位指令[DPLSY]。
∙ 频率:0~200KHz ∙ 输出端子:Y0 或 Y1∙ 输出模式:连续或有限脉冲输出 ∙脉冲数目:16位指令 0~K3276732位指令 0~K2147483647注意:如控制对象是步进电机或伺服电机,建议不要采用该指令,以避免电机失步。
采用带加减速的脉冲输出指令PLSR 可以避免失步造成的影响。
步进/伺服电机驱动器当输出完设定的脉冲数目之后,输出自动停止。
2、 可变频率脉冲输出指令PLSFM0以设定频率连续输出脉冲直到通过指令停止输出。
3、带加减速的定量脉冲输出指令PLSR (含3种控制模式)∙以指定的频率和加减速时间产生定量脉冲的指令。
∙频率:0~200KHz∙加减速时间:5000ms以下∙支持32位指令[DPLSR]。
∙输出端子:Y0 或Y1∙输出模式:有限脉冲数目∙脉冲数目:16位指令0~K32,76732位指令0~K2,147,483,647一般情况中途停止4、脉冲段切换[PLSNEXT/PLSNT]指令M81705、脉冲停止[STOP]指令6、脉冲数立即刷新[PLSMV]指令前进后退工作台原点信号● PLSMV 为32位操作指令● 当工作台后移的过程中,得到原点信号X2,执行外部中断,PLSMV 指令立即执行,不受扫描时间的影响,将输出端口Y0输出的脉冲数刷新,并送入D8170中。

PTO/PWM控制寄存器PLS指令读取存储在指定的SM内存位置的数据,并以此为PTO/PWM发生器编程。
SMB67控制PTO 0或PWM 0,SMB77控制PTO 1或PWM 1。
PTO/ PWM控制寄存器表描述用于控制PTO/PWM操作的寄存器。
您可以将下表用作快速参考,帮助确定放置在PTO/PWM控制寄存器中用于激活所需操作的数值。
您可以改变PTO或PWM信号波形的特征,方法是修改SM区(包括控制字节)中的位置,然后执行PLS 指令。
您可以在任何时间禁止PTO或PWM信号波形的生成,方法是向控制字节(SM67.7或SM77.7)的PTO/PWM启用位写入0,然后执行PLS指令。
状态字节中的PTO空闲位(SM66.7或SM76.7)表示编程脉冲串已完成。
此外,可在脉冲串完成时激活中断例行程序。
(请参阅中断指令说明和"通讯"指令。
)如果您在使用多段操作,在轮廓表完成时激活中断例行程序。
以下条件设置SM66.4(或SM76.4)和SM66.5(或SM76.5):?指定一个在数次脉冲后导致非法周期的周期氖 瞪 梢桓鍪 б绯鎏跫 锰跫 嶂罩筆TO功能,并将"募扑愦砦?位(SM66.4或SM76.4)设为1。
输出回复为映像寄存器控制。
以手动方式异常中止(禁用)正在执行的PTO轮廓会将"用户异常中止"位(SM66.5或SM76.5)设为1。
尝试在管线已满的情况下载入会将PTO溢出位(SM66.6或SM76.6)设为1。
如果您希望检测随后的溢出,您必须在检测到溢出后以手动方式清除该位。
转换至RUN(运行)模式可将该位初始化为0。
注释:当您载入新脉冲计数(SMD72或SMD82)、脉宽(SMW70或SMW80)或周期(SMW68或SMW78)时,在执行PLS指令之前,还需要在控制寄存器中设置适当的更新位。
对于多段脉冲串操作,在执行PLS 指令之前,您还必须载入轮廓表的起始偏移量(SMW168或SMW178)和轮廓表数值。

PLC脉冲输出功能5.5.4S7-200 PLC的脉冲输出功能1、概述S7-200有两个PTO/PWM发⽣器,⽤以建⽴⾼速脉冲串(PTO)或脉宽调节(PWM)信号波形。
⼀个发⽣器指定给数字输出点Q0.0,另⼀个发⽣器指定给数字输出点Q0.1。
其中,PTO提供⽅波(50%占空⽐)输出,脉冲周期和数量可由⽤户控制。
每个PTO/PWM发⽣器有⼀个控制字节(8位),⼀个周期值和脉宽值(不带符号的16位值)和⼀个脉冲计值(不带符号的32位值)。
这些值全部存储在特殊内存(SM)区域的指定位置。
⼀旦设置这些特殊内存位的位置,选择所需的操作后,执⾏脉冲输出指令PLS即启动操作。
该指令会从特殊存储器SM中读取数据,使程序按照其存储值控制PTO/PWM发⽣器通过修改SM区域中(包括控制字节)要求的位置,就可以更改PTO或PWM 的信号波形特征,然后执⾏PLS指令。
PTO/PWM控制寄存器包括状态位控制寄存器、控制位控制寄存器及其其他PTO/PWM寄存器。
⽤于Q0.0的这三种寄存器如表5-1,表5-2和表5-3所⽰。
表5-1 Q0.0的状态位控制寄存器表5-2 Q0.0的控制位控制寄存器表5-3 Q0.0的其他PTO/PWM寄存器2、PTO的操作模式PTO可提供单脉冲串或多脉冲串(使⽤脉冲轮廓)。
⑴PTO脉冲串的单段管线在单段管线模式,需要为下⼀个脉冲串更新特殊寄存器。
⼀旦启动了起始PTO 段,就必须按照第⼆个波形的要求改变特殊寄存器,并再次执⾏PLS指令。
第⼆个脉冲串的属性在管线中⼀直保持到第⼀个脉冲串发送完成。
在管线中⼀次只能存储⼀段脉冲串的属性。
当第⼀个脉冲串发送完成时,接着输出第⼆个波形,此时管线可以⽤于下⼀个新的脉冲串。
重复这个过程可以再次设定下⼀个脉冲串的特性。
⑵PTO脉冲串的多段管线在多段管线模式,CPU⾃动从V存储器区的包络表(轮廓表)中读出每个脉冲串的特性。
在该模式下,仅使⽤特殊存储器区的控制字节和状态字节。
可编程单次脉冲发生器的教学实验李桂林;苗长新【摘要】介绍了一个数字系统综合设计实验:可编程单次脉冲发生器的设计与实现.该脉冲发生器可在输入按键的控制下,产生单次的脉冲,脉冲的宽度可由8位的输入数据控制.实验以FPGA为硬件基础,以MAX+plusII为软件工具开发完成.实验不仅体现了数字系统设计实验课程的综合训练目标,要求学生能综合、灵活应用Verilog HDL语言,掌握多层次结构系统设计方法、Top_down设计思想和FPGA开发方法等理论知识,并且与工程实际结合紧密.所开发的系统具有很大的实用价值,是一个值得推广的典型教学实验.【期刊名称】《实验科学与技术》【年(卷),期】2010(008)001【总页数】4页(P12-14,25)【关键词】脉冲发生器;FPGA器件;MAX+plusII软件;模块【作者】李桂林;苗长新【作者单位】徐州师范大学电气工程及自动化学院,江苏,徐州,221116;中国矿业大学信息与电气学院,江苏,徐州,221008【正文语种】中文【中图分类】TN914.3;G642.0我校数字系统设计实验课程的“综合设计型实验”,要求学生以FPGA为硬件,以MAX+plusII为软件工具,设计实现一个“可编程单次脉冲发生器”。
可在输入按键的控制下,产生单次的脉冲,脉冲宽度可由8位的输入数据控制(以下称之为脉宽参数)。
通过该实验达到对原理图设计、Verilog HDL语言、多层次结构系统设计方法、Top_down设计思想、FPGA开发方法等理论知识综合运用的目的,培养学生理论与工程实际相结合的能力。
脉冲发生器作为一种重要的实验仪器被广泛应用在生产和科研中。
它的原理虽然简单,但采用传统元器件构成的电路却非常庞大和复杂。
可编程逻辑器件的出现很好地解决了这个问题。
一片合适容量的FPGA芯片可以取代十几片甚至几十片传统的74系列通用数字芯片[1-3]。
本实验即用一片FPGA完成单次脉冲发生器的设计。
Integral DIN mount and slim design takes up minimal cabinet space+5 to +30 Volt Power Input enables the device to be run from USB, a vehicle battery or the factory floorNon conducting polyamide casing with removablenumbered terminal blocks for easy wiringGB AEOF 00031/11Ethernet to Analogue I/O• 4 Analogue Outputs - Selectable as either current or Voltage • Supports simple ASCII or industry standard Modbus TCP • 1 Ethernet Port• -30°C to +80°C/-22ºF to +176ºF Temperature range4 Analogue OutputsED-560ConnectorsScrew Terminals 3.5mm pitchWire Thickness #22 - #14, 0.5mm 2-2.5mm 2Power SupplyPower Supply input Unregulated +5V to +30Volts DC, reverse polarity protection Isolation1500V RMS Magnetic isolation from Ethernet EnvironmentalOperating Temperature -30o C to +80o C / -22ºF to +176ºF Storage Temperature-40o C to +85o C / -40ºF to +185ºF Ambient Relative Humidity 5 to 95% (non-condensing)Magjack LED Information Link/Activity LED Solid greenConnection established Flashing Green Data communication Speed LED Green 100Base-Tx Unlit10Base-TEthernetEthernet Port RJ45 jack, 10/100Mhz autosensing, crossover auto sensing (Auto MDIX)Protection 1,500 Volts magnetic isolation between ports HousingIP-20 rated non-conducting polyamide caseEasy Wire Removable screw terminal blocksWide Range Input Power: +5VDC to +30VDCIntegral DIN rail clip with earthIP20 Non-conductingpolyamide case with vents-30ºC to +80ºC/-22ºF to +176ºF temperature rangeEthernet PortSerial Expansion Port suitable for ADAM modulesView from webpage - no software requiredIntegrate with popularsoftware packages or use with our free APIsSupports Modbus TCP or ASCIIcommands4 Analogue Output Lines: 12 bitEthernet to Analogue OutputED-560Ethernet Port Pin Outs PIN FUNCTION 1RD+ / TD+2RD- / TD-3TD+ / RD+4NC 5NC 6TD- / RD-7NC 8NCLifetime Warranty and Support:We can help with every aspect of your project, from getting you up and running to custom application.Terminal Block Pin OutsTerminal Block Pin 1Pin 2Pin 3Pin 4Pin 5Yellow AGND Vout 0Vout 1Iout 0Iout 1Grey SIG GND RS-485 D-RS-485 D+RS-485 D+RS-485 D-Green AGND Vout 2Vout 3Iout 2Iout 3Black-V+VA+VB-VFunc GNDPower Input +5V to +30V DCEthernet to Analogue OutputED-560Analogue Channels - 4 Outputs IO Protocols DCON ASCII over TCP or COM Port; Modbus TCP Description 4 Analogue OutputsOutput Isolation Yes, Outputs Isolated from Power, Network and Gateway Port Voltage Output Range 0-10VCurrent Output Ranges 0-20mA or 4-20mACurrent Output Type Sink (requires external power source)Output Resolution 12 bitWatchdogSets outputs to predefined values on timeout Max Output Load Current (Voltage Mode)±5mA Max Output Load Voltage (Current Mode)30V Dropout Voltage (Current Mode)2.8VOutput Accuracy0.1% of FSR @ 25 °C (77 °F)Output Drift (Voltage Mode) Zero drift less than 30µV/°C, span drift less than 25ppm/°C Output Drift (Current Mode) Zero drift less than 0.2µA/°C, span drift less than 25ppm/°C Output Slew Rate Voltage Mode: 170 kV/s, Current Mode: 4.3A/s Output Settling TimeVoltage Mode: 350µs, Current Mode: 4 µsSerial Expansion Port - RS485Half Duplex RS485 port allows connection and control of industry standard NuDAM, eDAM and ADAM modules using ASCII protocols.Power Supply Power Supply input Unregulated +5V to +30Volts DC, reverse polarity protection Isolation1500V RMS Magnetic isolation from Ethernet Ethernet to Analogue OutputED-560Full command tables can be found in the device manualSoftwareOS Compatibility Brainboxes’ software provides a TCP or Serial COM port interface . Allsoftware versions and updates available to download from our website.Microsoft Legacy COM port drivers for Microsoft OS up to latest Windows 10OtherTCP and web browser interface for other OSs & Linux, e.g. Android, Raspberry PiBoost.IO ManagerLets you find, install and upgrade devicesIndustry Standard PackagesThe COM port based driver means devices are compatible with popular packages such as: LabView, MATLAB, Agilent VEE. So you can continue to get value from your existing development and process control system.Software PlatformsAPIs and sample program code for: Microsoft .NET, C#, Visual Basic, C++,JavaScript, PHP, Java, Objective-C, Python and more - ModbusDevice works as a Modbus TCP server. Modbus TCP can be used on the input and output lines.Examples from Modbus TablesModbus access typeSupported Modbus function codes Logical address 984 style address IEC 61131address Read DI counter values Holding register 30x0000...40001...%MW0…Clear DI counters Coil 5, 150x0200...00513%M512…Set/read digital outputsCoil1, 5, 150x0000...00001...%M0…ASCIIThe ED device’s webpage has an interactive ASCII console where any command can be entered and it is immediately executed showing the device’s response.$01M read the name of device address 01 !01ED-588device 01 replies that its name is ED-588$01F read firmware version number of device address 01 !012.54firmware version of device 01 is 2.54Packaging Information PackagingInstallation CD including manual, Microsoft signed drivers & utilities, Quick Start GuideDevicePackaged Weight 0.197 kg, 6.95 ouncesPackaged Dims 160x135x49 mm, 6.3x5.3x1.9 inches GTIN Universal Code 837324003505ApprovalsIndustry Approvals Microsoft Certified Gold Partner, WEEE, RoHS, AEO (C-TPAT), CEProduct Support Warranty Lifetime - online registration requiredSupportLifetime Web, Email and Phone Support from fully qualified, friendly staff who work in and alongside the Product Development Team Additional InformationOEM option Available for bulk buy OEMMade In Manufactured in the UK by Brainboxes Winner 2005 European Electronics Industry Awards ‘Manufacturer of the Year’CustomisableBrainboxes operate a ‘Perfect Fit Custom Design’ policy for volume users. Moreinfo:********************© Brainboxes 2017BBED170328Ethernet to Analogue OutputED-560//********************MK-5886 coloured PCB connectors. Individually numbered pins; 5 x 3.5mm pitch screw connections with tension sleeve.PW-650Power supply with USBconnector and pre-wired screw terminal block. Suitable for use with 5V USB ports.PW-600Power supply with connectors for UK, USA, EU and AUS mains socket. ‘Tails’ are suitable for connecting to screw terminal blocks.ED RangeRemote I/O products available in a range of formats and specifications。
5.5.4S7-200 PLC的脉冲输出功能1、概述S7-200有两个PTO/PWM发生器,用以建立高速脉冲串(PTO)或脉宽调节(PWM)信号波形。
一个发生器指定给数字输出点Q0.0,另一个发生器指定给数字输出点Q0.1。
其中,PTO提供方波(50%占空比)输出,脉冲周期和数量可由用户控制。
每个PTO/PWM发生器有一个控制字节(8位),一个周期值和脉宽值(不带符号的16位值)和一个脉冲计值(不带符号的32位值)。
这些值全部存储在特殊内存(SM)区域的指定位置。
一旦设置这些特殊内存位的位置,选择所需的操作后,执行脉冲输出指令PLS即启动操作。
该指令会从特殊存储器SM中读取数据,使程序按照其存储值控制PTO/PWM发生器通过修改SM区域中(包括控制字节)要求的位置,就可以更改PTO或PWM 的信号波形特征,然后执行PLS指令。
PTO/PWM控制寄存器包括状态位控制寄存器、控制位控制寄存器及其其他PTO/PWM寄存器。
用于Q0.0的这三种寄存器如表5-1,表5-2和表5-3所示。
表5-1 Q0.0的状态位控制寄存器表5-2 Q0.0的控制位控制寄存器表5-3 Q0.0的其他PTO/PWM寄存器2、PTO的操作模式PTO可提供单脉冲串或多脉冲串(使用脉冲轮廓)。
⑴PTO脉冲串的单段管线在单段管线模式,需要为下一个脉冲串更新特殊寄存器。
一旦启动了起始PTO 段,就必须按照第二个波形的要求改变特殊寄存器,并再次执行PLS指令。
第二个脉冲串的属性在管线中一直保持到第一个脉冲串发送完成。
在管线中一次只能存储一段脉冲串的属性。
当第一个脉冲串发送完成时,接着输出第二个波形,此时管线可以用于下一个新的脉冲串。
重复这个过程可以再次设定下一个脉冲串的特性。
⑵PTO脉冲串的多段管线在多段管线模式,CPU自动从V存储器区的包络表(轮廓表)中读出每个脉冲串的特性。
在该模式下,仅使用特殊存储器区的控制字节和状态字节。
选择多段操作,必须装入包络表在V存储器中的起始地址偏移量(SMW168)。
目录第一章 概要………...…………………………………………………………………….3 1.1 初始设置的主要内容....................................................................................3 1.2 主循环之后的内容........................................................................................4第二章 电路图..........................................................................................................5 2.1 电路图..........................................................................................................5 2.2 外围硬件......................................................................................................5第三章 软件.............................................................................................................6 3.1 文件的组成..................................................................................................6 3.2 所用的内部外设功能....................................................................................7 3.3 初始设置和操作概述....................................................................................7 3.4 流程图..........................................................................................................9第四章 设置方法....................................................................................................10 4.1 设置16位定时器/事件计数器00的单次脉冲输出功能...............................10 4.2 设置单次脉冲有效宽度...............................................................................27 4.3 设置抖动检测时间......................................................................................28目标器件78K0S/KA1+ 微控制器 78K0S/KB1+ 微控制器 78K0S/KU1+ 微控制器 78K0S/KY1+ 微控制器第五章 用系统仿真器SM+进行操作检验 (29)5.1 连编举例程序.............................................................................................29 5.2 SM+的操作................................................................................................30 第六章 相关文档....................................................................................................34 附录 A 程序清单.. (35)附录 B 版本修订历史 (49)文档编号 U18891CA1V0AN00(第一版) 发布日期 2008年03月N2008日本印刷●本文档信息发布于2008年03月。
未来可能未经预先通知而进行更改。
在实际进行生产设计时,请参阅各产品最新的数据规格书或数据手册等相关资料,以获取本公司产品的最新规格。
并非所有的产品和/或型号都向每个国家供应。
请向本公司销售代表查询产品供货及其他信息。
●未经本公司事先书面许可,禁止采用任何方式复制或转载本文件中的内容。
本文件所登载内容的错误,本公司概不负责。
●本公司对于因使用本文件中列明的本公司产品而引起的,对第三者的专利、版权以及其它知识产权的侵权行为概不负责。
本文件登载的内容不应视为本公司对本公司或其他人所有的专利、版权以及其它知识产权做出任何明示或默示的许可及授权。
●本文件中的电路、软件以及相关信息仅用以说明半导体产品的运作和应用实例。
用户如在设备设计中应用本文件中的电路、软件以及相关信息,应自行负责。
对于用户或其他人因使用了上述电路、软件以及相关信息而引起的任何损失,本公司概不负责。
●虽然本公司致力于提高半导体产品的质量及可靠性,但用户应同意并知晓,我们仍然无法完全消除出现产品缺陷的可能。
为了最大限度地减少因本公司半导体产品故障而引起的对人身、财产造成损害(包括死亡)的危险,用户务必在其设计中采用必要的安全措施,如冗余度、防火和防故障等安全设计。
●本公司产品质量分为: “标准等级”、“专业等级”以及“特殊等级”三种质量等级。
“特殊等级”仅适用于为特定用途而根据用户指定的质量保证程序所开发的日电电子产品。
另外,各种日电电子产品的推荐用途取决于其质量等级,详见如下。
用户在选用本公司的产品时,请事先确认产品的质量等级。
“标准等级”:计算机,办公自动化设备,通信设备,测试和测量设备,视音频设备,家电,加工机械,个人电气设备以及产业用机器人。
“专业等级”:运输设备(汽车、火车、船舶等),交通用信号控制设备,防灾装置,防止犯罪装置,各种安全装置以及医疗设备(不包括专门为维持生命而设计的设备)。
“特殊等级”:航空器械,宇航设备,海底中继设备,原子能控制系统,为了维持生命的医疗设备和用于维持生命的装置或系统等。
除在本公司半导体产品的数据表或数据手册等资料中另有特别规定以外,本公司半导体产品的质量等级均为“标准等级”。
如果用户希望在本公司设计意图以外使用本公司半导体产品,务必事先与本公司销售代表联系以确认本公司是否同意为该项应用提供支持。
(注)(1)本声明中的“本公司”是指日本电气电子株式会社(NEC Electronics Corporation)及其控股公司。
(2)本声明中的“本公司产品”是指所有由日本电气电子株式会社或为日本电气电子株式会社(如上定义)开发或制造的产品。
M8E 02.11-12使用说明 U18891CA1V0AN第一章概要该举例程序介绍了使用16位定时器/事件计数器00的单次脉冲输出功能实例。
自检测到输入TI000引脚的外部信号上升沿开始,给定的延迟时间过后,输出一个单次脉冲。
此外,有效脉冲宽度依照开关输入次数而发生变化。
1.1 初始设置的主要内容初始设置的主要内容如下所示:•选择内部高速振荡器作为系统时钟信号源注。
•停止看门狗定时器运行。
•设置 V LVI(低压检测电压)为 4.3 V ±0.2 V。
• V DD(电源电压)变得高于或等于V LVI后,当检测到V DD低于V LVI时产生内部复位(LVI复位)信号。
•设置CPU时钟频率为8 MHz。
•设置I/O端口。
•设置16位定时器/事件计数器00。
•设置CR000 和CR010 作为比较寄存器。
•设置从检测到TI000 引脚有效沿到有效输出的延迟时间为1 ms (0.5µs × 2,000)。
•设置脉冲有效输出宽度为10 ms (0.5 µs × 20,000)。
•设置计数时钟为f XP/22(2 MHz)。
•设置TI000引脚上升沿有效。
•设置输出模式为单次脉冲输出模式。
•允许基于CR010 和TM00或CR000 和TM00匹配而引起的定时器输出反转。
•设置定时器输出初始值为0 (复位(0)定时器输出F/F)。
•允许定时器输出(TO00引脚输出)。
•设置操作模式为检测到TI000引脚有效沿时清零并启动。
•设置 INTP1 (外部中断)下降沿有效。
•使能INTP1 中断。
注用选项字节进行设置。
使用说明 U18891CA1V0AN 3第一章概要1.2 主循环之后的内容初始设置完成后,自检测到输入TI000引脚的外部信号的上升沿开始,给定的延迟时间过后,输出一个单次脉冲。
当检测到由开关输入产生的INTP1引脚下降沿时,进行INTP1中断服务。
检测到INTP1引脚下降沿10 ms后,若INTP1为高电平(开关关闭),确认为抖动。
自检测到边沿10ms后,若INTP1检测为低电平(开关开启),则有效脉冲宽度依照开关输入次数而发生变化。
注第三次开关输入后,有效脉冲宽度从第零次开关输入重复。
注意事项关于使用器件时的注意事项,参见各产品(78K0S/KU1+,78K0S/KY1+,78K0S/KA1+,78K0S/KB1+)用户手册。
使用说明 U18891CA1V0AN4第二章电路图本章描述了该举例程序中所使用的电路图和外围硬件。
2.1 电路图电路图如下所示:注 1.适用电压范围为4.5 V ≤ V DD≤ 5.5 V。
2. INTP1/TxD6/P43:78K0S/KA1+ 和 78K0S/KB1+ 微控制器。
INTP1/P32:78K0S/KY1+ 和 78K0S/KU1+ 微控制器。
3. TI000/INTP0/P30:78K0S/KA1+ 和 78K0S/KB1+ 微控制器。
TI000/ANI0/TOH1/P20:78K0S/KY1+ 和 78K0S/KU1+ 微控制器。
4. TO00/TI010/INTP2/P31:78K0S/KA1+ 和 78K0S/KB1+ 微控制器。