基于滑模变结构的直流伺服电机控制器设计
- 格式:doc
- 大小:267.00 KB
- 文档页数:6
电子信息与电气工程系课程设计报告设计题目:直流伺服电机控制系统设计系别:电子信息与电气工程系年级专业:学号:学生姓名:2006级自动化专业《计算机控制技术》课程设计任务书摘要随着集成电路技术的飞速发展,微控制器在伺服控制系统普遍应用,这种数字伺服系统的性能可以大大超过模拟伺服系统。
数字伺服系统可以实现高精度的位置控制、速度跟踪,可以随意地改变控制方式。
单片机和DSP在伺服电机控制中得到了广泛地应用,用单片机作为控制器的数字伺服控制系统,有体积小、可靠性高、经济性好等明显优点。
本设计研究的直流伺服电机控制系统即以单片机作为核心部件,主要是单片机为控制核心通过软硬件结合的方式对直流伺服电机转速实现开环控制。
对于伺服电机的闭环控制,采用PID控制,利用MATLAB软件对单位阶跃输入响应的PID 校正动态模拟仿真,研究PID控制作用以及PID各参数值对控制系统的影响,通过试凑法得到最佳PID参数。
同时能更深度地掌握在自动控制领域应用极为广泛的MATLAB软件。
关键词:单片机直流伺服电机 PID MATLAB目录1.引言 ...................................................... 错误!未定义书签。
2.单片机控制系统硬件组成.................................... 错误!未定义书签。
微控制器................................................ 错误!未定义书签。
DAC0808转换器.......................................... 错误!未定义书签。
运算放大器............................................... 错误!未定义书签。
按键输入和显示模块....................................... 错误!未定义书签。
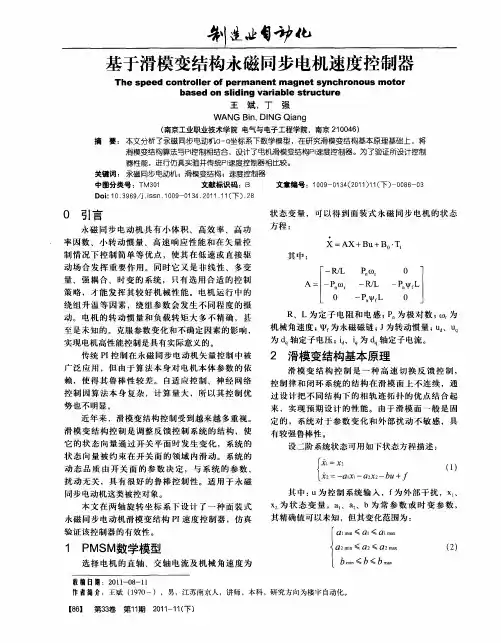
基于滑模自抗扰的永磁同步电机控制系统设计李益敏;陈愚;李云龙【摘要】针对具有不确定扰动及参数变化永磁同步电动机伺服系统控制困难的问题,提出了基于滑模的自抗扰控制器.通过对永磁同步电机伺服系统进行数学模型分析,将系统参数变化引起的内部不确定性及外部随机扰动视为\"总扰动\",设计线性扩张状态观测器观测并补偿,使系统近似为积分器串联型,滑模状态反馈使闭环伺服系统实现快速控制,并通过李雅普诺夫方法证明其一致稳定性.和传统线性自抗扰控制对比的仿真和试验数据均表明,提出的基于滑模自抗扰控制策略提高了永磁同步电动机的抗扰性和鲁棒性.【期刊名称】《电气传动》【年(卷),期】2019(049)008【总页数】4页(P22-25)【关键词】永磁同步电机;滑模控制;自抗扰控制;不确定性;外部扰动【作者】李益敏;陈愚;李云龙【作者单位】天津中德应用技术大学智能制造学院,天津 300350;天津中德应用技术大学智能制造学院,天津 300350;天津中德应用技术大学智能制造学院,天津300350【正文语种】中文【中图分类】TP391.9永磁同步电机(PMSM)是工业应用中最常使用的伺服系统执行机构,它具有体积较小、控制方便、效率高、电磁转矩大等优点。
永磁同步电动机具有非线性和强耦合等特征,高精度的伺服系统要求伺服电机在外部出现大的扰动时能保证良好的响应性能,因此永磁同步电机位置伺服控制必须采取更高性能的控制策略,必须同时克服永磁同步电机参数变量变化引起的内部不确定性及外部负载变化引起扰动的影响。
经典控制策略如传统PID控制[1],其具有不依赖数学模型、参数易于调节等优点,但是无法动态抑制内部不确定性和外部随机扰动。
现代非线性控制策略如自适应控制[2]、模糊控制[3]、变结构控制[4-5]等,此类现代控制策略虽然对电机参数和负载变化具有很强的鲁棒性,但都需要系统的精确模型和扰动信息,不但具有复杂的运算且参数较多、调节困难,不利于工程应用实践。
本科毕业设计文献综述题目: 基于嵌入式系统的永磁同步电机控制系统设计与实现基于嵌入式系统的永磁同步伺服电机控制系统设计与实现摘要:本文首先介绍了同步电机的概述,发展现状,工作原理和伺服系统的模型。
然后介绍了矢量控制的基本思想和基本原理。
本文重点分析了变结构滑模控制系统,包括滑模面的研究,以及趋近律的设计。
最后简单提了下永磁同步电机的发展前景。
关键字:同步电机,矢量控制,滑模控制,变结构。
1 永磁同步电机简介1.1 永磁同步伺服电机概述同步电动机的转速是由定子电流交变频率和极对数决定的[1]。
在电励磁的同步电动机中,允许电动机在任何功率因数下工作。
自控式调频方法从根本上解决了振荡、失步问题。
因此,同步电动机变频调速的应用范围越来越广阔,在电气传动领域里占有相当大的比重。
随着电机制造与控制技术的飞速发展,加之大规模集成电路、半导体功率器件和微处理器技术的进步,伺服技术作为自动化的基础技术,有了革命性的进步。
再加上永磁铁的加入,使得电机的效率更高,体积更小,永磁同步电机的特点是用永磁体取代绕线式同步电机转子中的励磁绕组,从而省去了励磁线圈、滑环和电刷。
因此永磁伺服电机得到了广泛的发展和应用。
20世纪80年代以来,具有高磁能积(Br ≥1T,Hc≥80kA/m)、价格低廉的钕铁硼(NdFeB)永磁材料的出现,使永磁同步电动机得到了很大的发展,世界各国(以德国和日本为首)掀起了一股研制和生产永磁同步电动机及其伺服控制器的热潮,尤其在数控机床,工业机器人等小功率的应用场合,永磁同步伺服电机是主要发展趋势。
1.2永磁同步电机伺服系统的国内外发展现状最早对永磁同步电机的研究主要集中在固定频率供电的永磁同步电机运行特性方面,尤其是对稳态特性和直接起动性能方面的研究。
从80年代开始,国外开始对逆变器供电的永磁同步电动机进行研究。
逆变器供电的永磁同步电机与直接起动的永磁同步电机的结构基本相同,但在大多数情况下无阻尼绕组。
第26卷第20期中国电机工程学报V ol.26 No.20 Oct. 2006 2006年10月Proceedings of the CSEE ©2006 Chin.Soc.for Elec.Eng.文章编号:0258-8013 (2006) 20-0139-05 中图分类号:TM383 文献标识码:A 学科分类号:470⋅40基于扩张状态观测器的永磁无刷直流电机滑模变结构控制夏长亮,刘均华,俞卫,李志强(天津大学电气与自动化工程学院,天津市南开区300072)Variable Structure Control of BLDCM Based on Extended State ObserverXIA Chang-liang, LIU Jun-hua, YU Wei, LI Zhi-qiang(School of Electrical Engineering and Automation, Tianjin University, Nankai District, Tianjin 300072, China)ABSTRACT:A simplified model of BLDCM is designed on the basis of the analysis of the actual model and characteristics of VSC, neglecting some minor elements, treating current fluctuation because of the current commutating as a disturbance. Based on the simplified model, the continuous, accurate and robust variable structure controller having an extended state observer for BLDCM is presented. VSC is insensitive to turbulence which can depress influence of the disturbances to BLDCM. The extended state observer (ESO) has good performance which can evaluate the states of uncertain object and real-time quantities of the object’s disturbance. The torque of BLDCM can be evaluated exactly by the extended state observer which increases the precision of control. The simulation illustrates that variable structure controller makes BLDCM less overshoot and quick velocity response which is insensitive to parameters of BLDCM, and has good depression of many disturbances. A TMS320LF2407A digital signal processor (DSP) is used to fully prove the flexibility of the control scheme in real time.KEY WORDS: brushless DC motor; variable structure control; extended state observer; digital signal processor摘要:根据无刷直流电机的数学模型和滑模变结构控制的特点,把换相引起的相电流变化当作外界对电机的干扰,建立了一个模型。
第34卷第4期2020年12月开封大学学报JOURNAL OF KAIFENG UNIVERSITYVol.34No.4Dec.2020基于滑模自抗扰的永磁同步电机伺服控制策略探究吴栋(开封市脫贫攻坚信息中心,河南开封475000)摘要:针对具有外部负载、转动惯量和电枢电阻变化等外部扰动与内部不确定性的永磁同步电动机,设计了一个基于滑模自抗扰控制器的伺服控制系统.通过对永磁同步电机伺服系统进行数学模型构建,将系统参数变化引起内部不确定性及外部随机扰动视为“总扰动”,设计过渡过程与线性扩张状态观测器进行观测并补偿,使得系统响应快速无超调地跟踪输入信号,滑模状态反馈使闭环伺服系统实现快速稳定控制,并通过李雅普诺夫方法,证明其一致稳定性.仿真和试验均表明,与传统PID和线性自抗扰控制相比,这种基于滑模自抗扰的控制策略更能抑制负载变化和转动惯量变化引起的扰动.关键词:永磁同步电机;滑模控制;自抗扰控制;不确定性;外部扰动中图分类号:TP272文献标识码0引言目前,永磁同步电机(PMSM)是工业应用中最常见的伺服系统执行机构,它具有体积小、控制方便、工作效率高、电磁转矩大等优点.永磁同步电动机具有非线性和强耦合等特征.高精度的伺服系统要求伺服电机在外部出现大的扰动时保证仍具有良好的响应性能,因此在永磁同步电机位置伺服控制方面必须采取更高等级的控制策略,必须同时克服永磁同步电机参数变量变化引起的内部不确定性及外部负载变化引起扰动的影响.如作为经典控制策略的传统PID控制[1],其具有不依赖数学模型、参数易于调节等优点,但是它无法动态抑制内部不确定性和外部随机扰动.现代非线性控制策略,如自适应控制比模糊控制、变结构控制⑷冈等,虽然对电机参数和负载变化具有很强的鲁棒性,但是它们都需要系统的精确模型和扰动信息,不但运算复杂,而且参数较多,调节困难,不利于工程应用实践.针对这些问题特别是在不确定系统中的问题,韩京清提出了非线性自抗扰控制器[6].高志强在此基础上进行简化,提出了线性自抗扰控制器及其实现的参数化.相对于非线性自抗扰控制,这是一种简化算法,它继承了自抗扰控制的优点[7].线性扩张状态A文章编号:1008-343X(2020)04-87-04观测器(LESO)是线性自抗扰控制器的重要组成部分,它不仅具有观测状态的能力,而且将系统模型的不确定性和外部扰动作为一个扩张状态进行实时估计.滑模控制(SMC)是不确定系统有效的控制方法,具有很强的鲁棒性.它的主要优点是:第一,能够快速响应和具有优良的动态性能;第二,对模型参数的不确定性和外部干扰具有很强的鲁棒性.滑模控制算法呵和自抗扰控制[6][7暂在永磁同步电机系统控制研究中均取得了良好的效果.但是,自抗扰控制对参数变化的鲁棒性不强[8].本文研究的目的是提高永磁同步电机系统抑制不确定性和外部干扰的能力和鲁棒性.为此,笔者结合自抗扰和滑模控制的优势,提出一种新的滑模线性自抗扰控制方案.首先,分析永磁同步电机的动力学模型.基于传统线性自抗扰控制和滑模控制,设计出滑模自抗扰控制器.其次,通过证明和分析,得出闭环系统的跟踪误差是一致收敛有界的.最后,滑模自抗扰控制与传统线性自抗扰控制仿真的对比,表明了文章提出的控制策略在永磁同步电机系统控制上的有效性.1系统建模本文研究的系统是定子为星型(Y)接法三相交流电供电、转子为平面的永磁式同步电动机.作如下收稿日期:2020-10-22作者简介:吴栋(1990—),男,河南省民权县人,助理工程师,硕士,主要从事滑模控制的永磁电动机研究。
滑模控制和滑膜变结构控制滑模控制和滑膜变结构控制是两种常用的控制方法,它们都具有在非线性系统中实现稳定控制的能力。
本文将从定义、原理、特点、应用等方面对这两种控制方法进行详细介绍。
一、滑模控制1.定义滑模控制是一种基于变结构控制的技术,它通过引入一个滑动模式来实现对系统的稳定性和鲁棒性的增强。
具体而言,它将系统分为两个部分,即“滑动模式”和“剩余部分”,然后设计一个控制器来使得系统的状态在“滑动模式”中运动,从而实现对系统的稳定和鲁棒性的保证。
2.原理滑模控制依赖于一个称为“滑动面”的函数,在该函数上系统状态会以特定方式运动。
当状态达到该函数上时,它将被强迫保持在该函数上,并且不会离开该函数。
因此,如果我们能够设计一个适当的“滑动面”,并使其与所需目标状态相交,则系统将被迫达到目标状态并保持在该状态上。
3.特点(1)鲁棒性:由于滑模控制依赖于变结构控制技术,因此它对系统中的不确定性和扰动具有很强的鲁棒性。
(2)快速响应:滑模控制器可以实现非常快速的响应,因为它可以在瞬间将系统状态从一个位置转移到另一个位置。
(3)简单性:相对于其他控制方法,滑模控制器通常比较简单,易于实现和调整。
4.应用滑模控制广泛应用于工业自动化、航空航天、机器人等领域。
例如,在直升机悬停控制中,滑模控制可以实现对直升机在空气动力学效应和风力扰动下的稳定悬停;在机器人轨迹跟踪问题中,滑模控制可以实现对机器人轨迹跟踪过程中的姿态稳定性和鲁棒性的保证。
二、滑膜变结构控制1.定义滑膜变结构控制是一种基于非线性系统理论和变结构控制理论的新型智能控制方法。
该方法通过引入一个“滑膜”来实现对非线性系统的稳定性和鲁棒性的增强。
2.原理滑膜变结构控制通过引入一个“滑膜”来实现对系统的控制。
滑膜是一个特殊的函数,它可以将系统分为两个部分,即“滑膜模式”和“剩余部分”。
然后设计一个控制器来使得系统的状态在“滑膜模式”中运动,从而实现对系统的稳定和鲁棒性的保证。
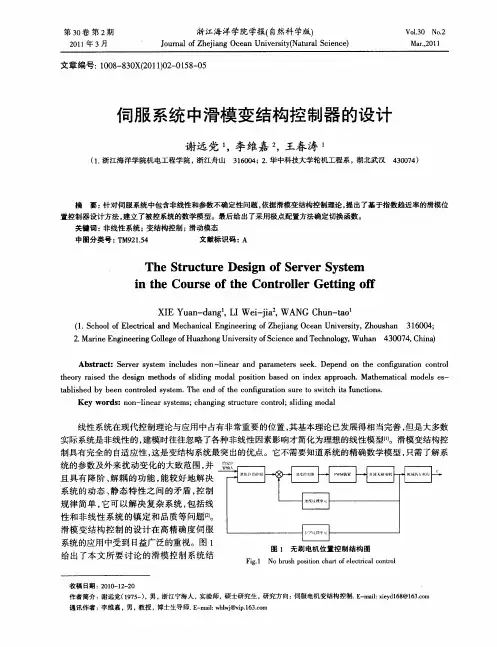
基于终端滑模控制器的高精度伺服系统设计Design of high precision servo system based on terminal sliding mode controller王朝阳,潘松峰WANG Zhao-yang, PAN Song-feng(青岛大学 自动化学院,青岛 266000)摘 要:随着工业机器人与精密机床的发展,传统的三环控制策略无法满足伺服系统对动态响应速度、位置跟踪精度及超调量越来越高的要求。
针对这一问题,结合已有的研究成果,提出微分前馈控制与终端滑模结合的控制策略,在负反馈基础上,添加位置前馈控制,实现位置信号的快速跟踪,将非奇异快速终端滑模控制方法应用到位置环与速度环,提高电机位置跟踪精度以及在电机出现较大位置误差时减小超调量。
理论分析和仿真验证算法的可行性和有效性。
关键词:永磁同步电机;位置伺服系统;终端滑模控制;前馈控制中图分类号:TP273 文献标识码:A 文章编号:1009-0134(2021)01-0113-05收稿日期:2019-10-20作者简介:王朝阳(1996 -),男,山东德州人,硕士研究生,研究方向为电机控制。
0 引言在工业机器人以及精密机床中的伺服系统要求较高的位置跟踪精度,同时位置伺服系统经常会出现阶跃的位置信号或者发生较大的位置误差,出现这种瞬时脉冲信号时无法避免出现较大的超调量,而位置环存在超调量的一部分原因是速度环抑制速度波动以及抗负载变化的能力弱。
这使传统的控制方法难以同时满足这两个要求。
文献[1~3]将滑模控制应用于伺服系统位置和速度环,通过对伺服系统滑模面及控制律的合理设计,较好地实现了位置精确定位;文献[4]将终端滑模控制方法应用于PMSM 的调速系统中,但用于位置伺服系统中时,系统位置跟踪精度较差需要改进位置环,同时添加位置前馈控制时,接收前馈补偿信号的速度环在采用滑模控制时也需要进行改进;文献[5]针对伺服系统的高精度位置控制问题,提出了基于自适应模糊补偿器的终端滑模控制方法;文献[6]将终端滑模控制应用到伺服系统的电流环、速度环和位置环中,系统具有较高的跟踪精度和较小的超调量;文献[7,8]将前馈控制应用于PMSM 位置伺服系统,将位置前馈补偿信号作用在速度环,在速度环使用PI 控制,系统跟踪误差小,但抑制速度波动以及抗负载变化的能力弱,超调量较大。
关键字:滑模变结构PI 直流伺服电机PID
1引言
滑模变结构控制系统是一类特殊的变结构控制系统。
起特殊之处在于,系统的控制不仅有切换,而且该切换特性可以迫使系统的状态在切换面上沿预定的轨迹作小幅度、高频率的趋近运动-滑动模态运动。
这种滑动模态可以设计成与系统的参数及扰动无关。
这样,滑模变结构控制无须系统在线辨识就具有很好的鲁棒性。
滑模变结构控制近年来已被广泛应用于处理一些复杂的线性系统、非线性系统、时变、多变量耦合等确定性和不确定性系统,可使系统获得良好的动态品质[1]。
而对于高性能的直流伺服系统,一般要求精度高、无超调、响应速度快且鲁棒性好。
根据自动调节原理设计的常规PID、PI等控制器,结构简单,设计方法成熟,也容易实现,但直流伺服系统中的非线性、参数的时变性和外部扰动等都影响系统的控制性能,很难满足高精度伺服系统的要求。
滑模变结构控制的滑动模态对加给系统的干扰和系统的各种摄动具有完全自适应性,所以能完全满足高精度伺服系统的控制要求[2,4]。
2滑模变结构控制器设计
直流伺服系统的结构框图如图1所示,虽然在多数情况下常把电机的参数看成常数,但实际当转速在大范围内变化时,电机的参数并非常数,而滑模控制正好对参数的变化不太敏感,故
使用这种控制方式来控制电机具有很大的优越性。
2.3切换函数s的选取2.4控制量u的求取
3仿真与结论
由仿真结果可以看到,显然,当有电机参数大幅摄动时,滑模变结构控制系统能适应系统参数的变化,响应时间很快,很快达到稳态,无超调;而PID产生了大幅度的超调,对于直流伺服电机控制系统而言,超调过大,严重影响加工等过程。
5结束语
本文通过对直流伺服系统分析,并对其设计了滑模变结构控制策略,设计方法简单,易于实现。
从仿真分析可知,滑模变结构控制优于PID控制,具有较强抑制参数摄动,自适应强。
另外合理地选择切换函数和控制率参数,滑模变结构控制系统具有快速性好、无超调、无静差的优良动、静态性能,而且系统参数摄动时,具有很好的鲁棒性。