二阶倒立摆的稳定性控制
- 格式:doc
- 大小:26.50 KB
- 文档页数:5

基于滑模控制的二级倒立摆稳定控制
战江洋;侯立刚;苏成利;高红
【期刊名称】《青岛科技大学学报(自然科学版)》
【年(卷),期】2009(030)004
【摘要】对二级倒立摆系统的稳定和鲁棒控制问题,采用极点配置方法设计了滑模变结构控制器.针对变结构控制器的抖振,提出了一种新型的变趋近律方法来改进控制器.仿真实验表明,该控制策略不仅能实现系统的稳定控制,而且具有较强的抗干扰能力和鲁棒性.
【总页数】4页(P365-368)
【作者】战江洋;侯立刚;苏成利;高红
【作者单位】辽宁石油化工大学,信息与控制工程学院,辽宁,抚顺,113001;辽宁石油化工大学,信息与控制工程学院,辽宁,抚顺,113001;辽宁石油化工大学,信息与控制工程学院,辽宁,抚顺,113001;辽宁石油化工大学,信息与控制工程学院,辽宁,抚
顺,113001
【正文语种】中文
【中图分类】TP273;TP13
【相关文献】
1.基于自适应模糊PID的二级倒立摆稳定控制研究 [J], 窦立环
2.基于差动制动的汽车拖车组合系统动态稳定性滑模控制 [J], 赵子乾;张宁;殷国栋;孙蓓蓓;吴建华
3.基于滑模控制的四轮驱动电动汽车稳定性控制 [J], 赵艳娥;张建武
4.基于滑模控制理论的车辆横向稳定性控制 [J], 赵树恩;李以农;郑玲;冀杰
5.基于最优滑模控制理论的船舶稳定性控制策略研究 [J], 赵静
因版权原因,仅展示原文概要,查看原文内容请购买。
文献综述二级倒立摆系统建模与仿真学生:学号:专业:自动化班级:2007.4指导教师:四川理工学院自动化与电子信息学院二O一一年三月第1部分前言1.1倒立摆的发展及背景早在 20世纪 60年代, 人们就开始了对倒立摆系统的研究。
1966年Schaefer和 Cannon应用 Bang2 Bang控制理论, 将一个曲轴稳定于倒置位置。
自从倒立摆系统成为[1]自动控制领域控制实验室的实验和教学工具以来,人们对倒立摆控制的研究既有理论研究又有实验研究。
通过计算机仿真的方法对控制理论和控制方法的进行可行性研究;实验研究主要是解决仿真结果和实时控制之间性能差异的物理不确定性。
早在 1972 年,Stugne 等人采用全维状态观测器来重构了状态,并使用线性控制模拟电路实现了二级倒立摆的控制,倒立摆的线性状态反馈采用极点配置的方法获得。
1978 年,K. furutat 等人成功地应用降维观测器重构了倒立摆系统的状态,使用计算机处理实现了对三级倒立摆的控制。
1984 年,K.furutat 等人又实现了三级倒立摆的稳定控制。
1986 年,Chung 等人对一级倒立摆系统进行了系统辨识,并设计了 PD 反馈控制器和自适应自整定反馈控制器实现了对倒立摆的稳定控制[1]。
1989 年,Anderson 等人运用函数最小化和 LyaPunov 稳定方法成功产生了一个优化反馈控制器。
1994 年,sinha等人,利用 Lyapunov—Floquet 变换得到了三级倒立摆系统的计算机仿真模型[2]。
1995 年,任章等人在一种镇定倒立摆系统的新方法中应用振荡控制理论,在倒立摆支撑点的竖直方向上加入一个零均值的高频振荡信号,改善了倒立摆系统的稳定性。
1996 和 1997 年,翁正新等人利用带观测器的 Hao 状态反馈控制器对二级倒立摆系统在水平和倾斜导轨上进行了仿真控制。
1998年,蒋国飞等人将 BP 神经网络和 Q 学习算法有效结合,实现了倒立摆的无模型学习控制。

二级倒立摆系统的控制与仿真一、引言在计算机参与的具有联系受控对象的控制系统中,有必要对联系控制系统设计数字控制器的必要,一般对于联系的控制对象设计数字控制器的方法有:第一种是应用联系系统理论得到的联系控制规律,再将控制规律离散化,用控制器实现,第二种是将联系的控制对象离散化,用离散控制理论设计控制器参数,数字再设计就是根据连续系统及相应的控制规律如何重新设计对应的离散系统与相应的离散控制规律。
我们采用的是最优等价准则、双线性变换法、平均增益法进行数字再设计。
二、LQR控制器设计(1) 二级倒立摆系统的状态空间模型设线性定常系统为x’=A*x(t)+B*u(t),y=C*x(t)其初始条件为x(t)=x0;其中:A=[0,1,0,0;40,0,0,0;0,0,0,1;-6,0,0,0];B=[0;-2;0;0.8];C=[1,0,0,0;0,0,1,0](2) 系统的能控性判定n=size(A); Tc=ctrb(A,B); nc=rank(Tc)n=6 6 nc=6从运行结果可知,系统的阶次为6,能控性矩阵的秩也为6,因此系统是能控的。
(3) 系统的能观性判定To=obsv(A,C);no=rank(To)no=6从运行结果可知,能观性矩阵的秩为6,与系统的阶次相等,因此系统是能观测的。
(4) LQR控制设计基于一级倒立摆系统具有能控性和能观性,因此可采用LQR进行控制,经大量反复试验和仿真,选取R=0.2,Q=[1 0 0 0 0 0;0 64 0 0 0 0;0 0 256 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0];F=lqr(A,B,Q,R)得到:F =2.2361 106.6465 -155.4620 5.1719 4.9639 -24.5330三、仿真曲线采用LQR控制方式,设初始状态为x(0)=[1,-1,0,0]’,在相同采样周期T下应用数字再设计方法对一级倒立摆系统进行仿真,其中F(T)分别取为:1. F(T)=F1(T)=F2. F(T)=F2(T)=F[I+(A+BF)T/2]3. F(T)=F3(T)=F[I-(A+BF)/2]-1(1) T=0.013s,øc=e(A+BF)T时系统的极点、状态x1、x2、x3的离散仿真曲线A=[0,0,0,1,0,0;0,0,0,0,1,0;0,0,0,0,0,1;0,0,0,0,0,0;0,77.0642,-21.1927,0,0, 0;0,-38.5321,37.8186,0,0,0];B=[0;0;0;1;5.7012;-0.0728];C=[1,0,0,0,0,0;0,1,0,0,0,0;0,0,1,0,0,0];D=[0;0;0];Q=[1 0 0 0 0 0;0 64 0 0 0 0;0 0 256 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0];R=0.2;F=lqr(A,B,Q,R)T=0.013;[G,H]=c2d(A-B*F,B,T); %%离散一的函数p0=eig(G),x0=[1 -1 0.5 0 0 0]';[y,x t]=dinitial(G,B,C,D,x0);t=0:0.1:(t-1)/10;subplot(3,1,1),x1=[1 0 0 0 0 0]*x'; %%响应曲线plot(t,x1);grid;title('状态变量x1的响应曲线')subplot(3,1,2),x2=[0 1 0 0 0 0]*x';plot(t,x2);grid;title('状态变量x2的响应曲线')subplot(3,1,3),x3=[0 0 1 0 0 0]*x';plot(t,x3);grid;title('状态变量x3的响应曲线')p0 =0.8647 + 0.0473i0.8647 - 0.0473i0.9224 + 0.0618i0.9224 - 0.0618i0.9932 + 0.0066i0.9932 - 0.0066i图1 øc=e(A+BF)T(2) T=0.013s,øc=ø +ΓF1(T)时系统的极点、状态x1、x2、x3的离散仿真曲线A=[0,0,0,1,0,0;0,0,0,0,1,0;0,0,0,0,0,1;0,0,0,0,0,0;0,77.0642,-21.1927,0,0,0;0,-38.5321,37.8186,0,0,0];B=[0;0;0;1;5.7012;-0.0728];C=[1,0,0,0,0,0;0,1,0,0,0,0;0,0,1,0,0,0];D=[0;0;0];Q=[1 0 0 0 0 0;0 64 0 0 0 0;0 0 256 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0];R=0.2;F=lqr(A,B,Q,R)T=0.013;[Ad,B]=c2d(A,B,T); %%离散二的函数Ad=Ad-B*F;p1=eig(Ad)x0=[1 -1 0.5 0 0 0]';[y,x t]=dinitial(Ad,B,C,D,x0);t=0:0.1:(t-1)/10;subplot(3,1,1),x1=[1 0 0 0 0 0]*x'; %%显示程序plot(t,x1);grid;title('状态变量x1的响应曲线')subplot(3,1,2),x2=[0 1 0 0 0 0]*x';plot(t,x2);grid;title('状态变量x2的响应曲线')subplot(3,1,3),x3=[0 0 1 0 0 0]*x';plot(t,x3);grid;title('状态变量x3的响应曲线')p1 =0.8349 + 0.0388i0.8349 - 0.0388i0.9247 + 0.0561i0.9247 - 0.0561i0.9932 + 0.0066i0.9932 - 0.0066i图2 øc=ø +ΓF1(T)(3) T=0.013s,øc=ø+ΓF2(T)时系统的极点、F(T)值和状态x1、x2、x3的离散仿真曲线A=[0,0,0,1,0,0;0,0,0,0,1,0;0,0,0,0,0,1;0,0,0,0,0,0;0,77.0642,-21.1927,0,0, 0;0,-38.5321,37.8186,0,0,0];B=[0;0;0;1;5.7012;-0.0728];C=[1,0,0,0,0,0;0,1,0,0,0,0;0,0,1,0,0,0];D=[0;0;0];Q=[1 0 0 0 0 0;0 64 0 0 0 0;0 0 256 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0];R=0.2;F=lqr(A,B,Q,R)T=0.013;P2=(A-B*F)*T/2; %%离散3的函数F2=F*(eye(size(P2))+P2)[Add,B]=c2d(A,B,T);Ad=[Add-B*F2];p2=eig(Ad)x0=[1 -1 0.5 0 0 0]';[y,x,t]=dinitial(Ad,B,C,D,x0);t=0:0.1:(t-1)/10;subplot(3,1,1),x1=[1 0 0 0 0 0]*x'; %%显示程序plot(t,x1);grid;title('状态变量x1的响应曲线')subplot(3,1,2),x2=[0 1 0 0 0 0]*x';plot(t,x2);grid;title('状态变量x2的响应曲线')subplot(3,1,3),x3=[0 0 1 0 0 0]*x';plot(t,x3);grid;title('状态变量x3的响应曲线')F2 =1.7236 90.8365 -126.5481 4.0012 4.5195 -19.9211 p2 =0.8676 + 0.0465i0.8676 - 0.0465i0.9224 + 0.0627i0.9224 - 0.0627i0.9932 + 0.0066i0.9932 - 0.0066i图3 øc=ø+ΓF2(T)(4) T=0.013s,øc=ø+ΓF3(T)时系统的极点、F(T)值和状态x1、x2、x3的离散仿真曲线A=[0,0,0,1,0,0;0,0,0,0,1,0;0,0,0,0,0,1;0,0,0,0,0,0;0,77.0642,-21.1927,0,0, 0;0,-38.5321,37.8186,0,0,0];B=[0;0;0;1;5.7012;-0.0728];C=[1,0,0,0,0,0;0,1,0,0,0,0;0,0,1,0,0,0];D=[0;0;0];Q=[1 0 0 0 0 0;0 64 0 0 0 0;0 0 256 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0];R=0.2;F=lqr(A,B,Q,R)T=0.013;P3=(A-B*F)*T/2; %%离散4的函数F3=F*(eye(size(P3))-P3)^-1[Add,B]=c2d(A,B,T);Ad=[Add-B*F3];p3=eig(Ad),[y,x,t]=dinitial(Ad,B,C,D,x0);t=0:0.1:(t-1)/10;subplot(3,1,1),x1=[1 0 0 0 0 0]*x'; %%显示程序plot(t,x1);grid;title('状态变量x1的响应曲线')subplot(3,1,2),x2=[0 1 0 0 0 0]*x';plot(t,x2);grid;title('状态变量x2的响应曲线')subplot(3,1,3),x3=[0 0 1 0 0 0]*x';plot(t,x3);grid;title('状态变量x3的响应曲线')F3 =1.7779 92.1683 -129.2365 4.1238 4.5459 -20.3464 p3 =0.8655 + 0.0476i0.8655 - 0.0476i0.9222 + 0.0622i0.9222 - 0.0622i0.9932 + 0.0066i0.9932 - 0.0066i图4 øc=ø+ΓF3(T)由上面的1-4图我们可以知道:F(T)分别取F1(T),F2(T),F3(T)构成的闭环离散系统时仿真曲线基本一致,相应情况的闭环极点也基本相同,而取F(T)=F3(T)时,从系统的极点看,用øc=ø+ΓF3(T)代替øc=e(A+BF)T 构成闭环系统的精确度相当好。
倒立摆系统的控制算法及仿真1.1 倒立摆控制算法1.1.1 倒立摆控制算法概述单级倒立摆的稳定控制,实际上是一单输入多输出系统的稳定控制。
此时系统输入是电机控制电压u,输出是倒立摆竖直方向角度θ和旋臂位置ϕ。
对方程(2.5)进行变形即得θ与u 之间的输入输出方程,很明显,它是一个不稳定的二阶系统。
控制倒立摆使之稳定的方法很多,当前已有的倒立摆控制规律可总结为:(1)PID控制,通过对倒立摆物理模型的分析,建立倒立摆的动力学模型,然后使用状态空间理论推导出其非线性模型,再在平衡点处进行线性化得到倒立摆系统的状态方程和输出方程,于是就可设计出PID控制器实现其控制;(2)状态反馈H∞控制,通过对倒立摆物理模型的分析,建立倒立摆的动力学模型,然后使用状态空间理论推导出状态方程和输出方程,于是就可应用H∞状态反馈和Kalman 滤波相结合的方法,实现对倒立摆的控制;(3)利用云模型实现对倒立摆的控制,用云模型构成语言值,用语言值构成规则,形成一种定性的推理机制。
这种拟人控制不要求给出被控对象精确的数学模型,仅仅依据人的经验、感受和逻辑判断,将人用自然语言表达的控制经验,通过语言原子和云模型转换到语言控制规则器中,就能解决非线性问题和不确定性问题;(4)神经网络控制,业已证明神经网络(NeuralNetwork ,NN) 能够任意充分地逼近复杂的非线性关系,NN 能够学习与适应严重不确定性系统的动态特性,所有定量或定性的信息都等势分布贮存于网络内的各种神经元,故有很强的鲁棒性和容错性,也可将Q学习算法和BP神经网络有效结合,实现状态未离散化的倒立摆的无模型学习控制;(5)遗传算法( Genetic Algorithms , GA),高晓智在Michine 的倒立摆控制Boxes 方案的基础上,利用GA 对每个BOX 中的控制作用进行了寻优,结果表明GA可以有效地解决倒立摆的平衡问题;(6)自适应控制,主要是为倒立摆设计出自适应控制器;(7)模糊控制,主要是确定模糊规则,设计出模糊控制器实现对倒立摆的控制;(8)使用几种智能控制算法相结合实现倒立摆的控制,比如模糊自适应控制,分散鲁棒自适应控制等等,(9)采用GA 与NN 相结合的算法,首先建立倒立摆系统的数学模型,然后为其设计出神经网络控制器,再利用改进的贵传算法训练神经网络的权值,从而实现对倒立摆的控制,采用GA 学习的NN 控制器兼有NN 的广泛映射能力和GA 快速收敛以及增强式学习等性能。
采用自适应模糊 PID 的二阶倒立摆控制宋国杰【摘要】建立一个二阶倒立摆的数学模型,将常规比例-积分-微分(PID)控制与模糊控制相结合,设计模糊PID 控制器,实现 PID 参数的自适应模糊整定。
仿真实验表明:所设计的模糊 PID 控制器能很好地实现二阶倒立摆的扶起平衡控制,控制效果明显好于常规 PID 控制器,超调量和调节时间较小,具有较好的抗干扰能力,非常适合二阶倒立摆模型的稳定控制。
%In this paper,a mathematical model of second-order inverted pendulumis built.The conventional proportional-integral-differential (PID)control and fuzzy controlare combined,and a fuzzy PID controlleris designed.The adaptive fuzzy tuning of PID parameters is obtained.Simulation results show the designed fuzzy PID controller can well realize the propped balance control of second-order inverted pendulum,the control effect is obviously better than the conventional PID controller,the overshoot and adjust time is small,and has a good anti-jamming capability.It is very suitable for the stability control of the model of second-order inverted pendulum.【期刊名称】《华侨大学学报(自然科学版)》【年(卷),期】2016(000)001【总页数】5页(P74-78)【关键词】倒立摆;模糊控制;比例-积分-微分控制器;自适应;稳定控制【作者】宋国杰【作者单位】四平职业大学电子工程学院,吉林四平 136002【正文语种】中文【中图分类】TP391.9作为一个典型的不稳定、高阶次、强耦合、多变量非线性系统,倒立摆模型是控制领域内众多专家学者关注和研究的对象[1-2].通过倒立摆模型,可以对已有的控制方法和理论进行模拟和验证,从而提出一些新的理论方法,并将其应用于人工智能、生物工程、计算机视觉、航空航天等领域.目前,对于倒立摆的控制主要包括状态反馈、线性二次型调节器(LQR)等现代控制理论方法,根轨迹、比例-积分-微分(PID)等经典控制理论方法,以及模糊、神经网络、支持向量机等智能方法.其中,PID方法由于理论成熟、便于实现,在倒立摆的控制中应用最为广泛[3-6].尽管如此,PID方法还是存在一些缺陷,如泛化能力差、鲁棒性不高等.除了PID方法,模糊理论也是应用较多的一种方法[7-9].然而,模糊控制方法的适应性较差,当系统参数改变,或出现未知状况时,控制效果明显变差.因此,将两者结合的研究成果也开始出现,但这些研究目前主要集中于一阶或平面倒立摆[10-11].本文将直线二阶倒立摆作为研究对象,将PID控制和模糊控制相结合,设计一种自适应模糊PID控制器.一个典型的直线二阶倒立摆模型主要由小车、两个摆杆和连接块组成[12-13],如图1所示.由于多了一级摆杆,其复杂性远高于一阶倒立摆.首先,根据倒立摆模型的物理学运动规律建立微分方程,即式(1)中:,(m1l1+m2L2)gsin θ1,m1l2gsin θ2]T.其中,m0为小车质量;m1和m2分别为摆杆1和摆杆2的质量;J1和J2分别为摆杆1和摆杆2的转动惯量;l1和l2分别为摆杆1和摆杆2转动中心到杆质心的距离;L1和L2分别为摆杆1和摆杆2的长度;f0为小车与轨道间的摩擦系数;f1和f2分别为摆杆1和摆杆2的绕动摩擦系数;g为重力加速度.对式(1)在系统平衡点处进行线性化处理,可得系统的状态方程为式(2)中:;Y=[r,θ1,θ2]T;;;C=[I3,03];;0和I分别表示适当维数的零矩阵和单位阵.至此,可以得到直线二阶倒立摆的状态空间方程.在设计控制器时,考虑将PID算法和模糊算法有机结合,既利用前者的实用性,又结合后者的智能性.根据对二阶倒立摆模型参数和稳定条件的分析,在设计模糊推理时,采用Mamdani的形式,通过在线方式实时调节PID算法的3个参数[13-14].具体思路为:将一个常规PID控制器作为主控制器,另设计一个模糊推理模块,利用该模块对PID控制器的比例、积分和微分3个参数进行自适应整定.此外,文中进行了两点改进.1) 以往大多数的模糊推理模块只是单纯地将偏差E作为输入,为了更为客观、迅速地反映系统变化,将偏差变化率CE也作为一个输入.2) 设计模糊推理模块的输出为参数的变化调整量,则PID算法只需进行相应的调整即可.这样模糊推理模块就形成了一个2输入、3输出的结构,具体如图2所示.由图2可知:该控制器结构同时具有PID和模糊两种算法的优点,其动态和静态性能较好,非常适合二阶倒立摆这样的非线性动态系统控制.根据设计的模糊PID控制器的结构,将二阶倒立摆的摆杆1和摆杆2所在的角度偏差E及其变化率CE作为系统输入.设定角度偏差E和偏差变化率CE的模糊子集为{负大,负中,负小,零,正小,正中,正大},利用符号表示为{NB,NM,NS,Z,PS,PM,PB},输出模糊子集与其具有相同形式的符号表示.根据E和CE对系统影响程度的不同,当变化超过60%时,即达到了模糊推理模块的最大值,故设定E和CE基本论域分别为[-80,80],[-10,10],输入量的模糊论域为[-6,6];3个输出变量ΔKP,ΔKI和ΔKD的基本论域为[-0.4,0.4],[-0.06,0.06],[-3, 3],模糊论域为[-3,3].考虑到等三角函数的灵敏度较高,可以在论域范围内均匀分布,故将其作为隶属度函数.据此,对PID算法的比例 KD、积分KI、微分KD等3个参数制定不同情况下的整定规则.1) 当角度偏差E变化较大时,很可能出现微分过饱现象,使系统超出控制范围.为了保证系统能够快速响应,KP应设定为一个较大数值,KD相应的需设定较小一些,同时取KI,防止系统超调过大.2) 当角度偏差E和偏差变化率CE的值在适中范围时,既要考虑系统的超调不能过大,又要保证系统具有较快的响应速度,KP需设定一个较小的数值,KI和KD取值适中即可.3) 当角度偏差E变化较小时,首先,需要让系统维持较好的稳定性,KP和KI都应设定较大的数值;其次,考虑降低系统振荡的风险,KD应与角度偏差变化率CE 的取值进行相反设定.针对比例KP、积分KI、微分KD等3个参数的模糊控制规则,分别如表1~3所示.对提出的模糊PID控制器的二阶倒立摆控制性能进行仿真分析,并与文献[4]提出的PID方法进行对比.利用Matlab软件的Simulink模块,搭建PID控制算法的系统,结果如图3所示.这3个PID控制器分别控制小车位移r和两个摆杆的角度α1和α2[15].对于二阶倒立摆这样的典型不稳定系统,初始值的不同对于PID算法的控制效果具有很大的影响,选择不当会使控制品质下降,甚至系统发散.选择两组初始参数,分别设定为 (r,α1,α2)={0,0,0},(r,α1,α2)={-0.1,-0.2,-0.1},控制效果如图4所示.由图4可知:PID方法对于二阶倒立摆具有一定的控制效果,要求系统初始参数选择适当;第一组参数明显具有更短的调节时间,但第二组参数的超调量更小.此外,PID方法的3个参数也需根据经验或经过多次反复试验给定,泛化性较差.其次,根据设计的模糊PID控制器搭建系统模型,将图3中的3个常规PID控制器替换为图5所示的模糊PID控制器即可,其他不变.在仿真过程中,仍取上述相同的两组初始条件,仿真结果如图6所示.由图6可知:模糊PID对于二阶倒立摆具有较好的控制效果.相较于常规PID方法,模糊PID降低了系统对于初始值的敏感度,两组参数情况下的控制效果相当,超调量和调节时间都明显较小,且明显好于常规PID方法.最后,在程序编译成功之后,采用手动方式将摆杆提到中间的一个平衡位置,运行程序,其控制效果如图7,8所示.由图7,8可知:模糊PID方法对于二阶倒立摆系统控制的稳定度明显高于常规PID 方法,两个摆杆角度的变化幅度也明显较小.多次改变系统初始参数,控制效果基本相同,这里不一一赘述.在系统运行过程中,突然施加一个外部扰动,考察模糊PID方法的抗干扰性,控制结果如图9所示.由图9可知:在系统运行第3 s时,突然受到一个外部干扰,但是在大概2 s以后就迅速恢复为稳定状态,而且系统的超调量较小,说明模糊PID方法对于外部扰动具有较好的抑制作用.综合比较以上结果可知,所设计的模糊PID控制器对二阶倒立摆具有较好的控制效果,无论是超调量,还是调节时间都明显好于常规PID方法.采用自适应模糊PID对直线二阶倒立摆的控制问题进行研究.首先,建立二阶倒立摆的数学模型,反映出其是一个典型的不稳定系统;其次,将常规PID算法与模糊理论相结合,设计模糊PID控制器,可以实现PID参数的自适应模糊整定[16].仿真及实测实验表明:所设计的模糊PID控制器可以很好地实现二阶倒立摆的扶起平衡控制,控制效果明显好于常规PID控制器,超调量和调节时间较小,并具有较好的抗干扰能力,为直线二阶倒立摆的控制问题提供了一条可借鉴的思路.【相关文献】[1] 赵建军,魏毅,夏时洪,等.基于二阶倒立摆的人体运动合成[J].计算机学报,2014,37(10):2187-2195.[2] 吴震宇,方敏,丁康.基于LabVIEW的二级倒立摆控制系统三维仿真[J].合肥工业大学学报(自然科学版),2011,34(10):1480-1484.[3] 项雷军,王涛云,郭新华.多区域互联电网的分散式模糊PID负荷频率控制[J].华侨大学学报(自然科学版),2014,35(2):121-126.[4] 杨平,徐春梅,贺茂康,等.直线二级倒立摆的PID实时控制[J].上海电力学院学报,2008,24(3):236-238.[5] 王宏楠.基于RBF神经网络二级倒立摆系统的PID控制[J].辽宁石油化工大学学报,2010,30(2):58-61.[6] 王俊.基于倒立摆的PID控制算法的研究[J].现代电子技术,2012,35(23):152-154.[7] 李红伟.单级倒立摆的简化模糊控制及仿真研究[J].控制工程,2010,17(6):769-773.[8] 侯涛,牛宏侠.平面一级倒立摆的双闭环模糊控制研究[J].兰州交通大学学报,2011,30(4):11-19.[9] 侯涛,范多旺,杨剑锋.基于T-S型的平面倒立摆双闭环模糊控制研究[J].控制工程,2012,19(5):753-756.[10] 王子涛,王家军,何杰.基于自适应模糊PID平面倒立摆的建模与仿真[J].杭州电子科技大学学报,2010,30(4):86-91.[11] 杨治明,宋乐鹏,杨清林,等.基于模糊控制和PID控制的一阶倒立摆系统建模与仿真[J].北华大学学报(自然科学版),2012,13(3):356-359.[12] 洪江,周明华.二阶倒立摆的稳定性控制[J].科技资讯,2012,36(27):70-71.[13] 王春民,栾卉,杨红应.倒立摆控制的设计与仿真[J].吉林大学学报(信息科学版),2009,6(3):242-247.[14] 王广雄,张静,罗晶,等.倒立摆的模型和控制问题[J].电机与控制学报,2004,8(3):247,262-295.[15] 柴军营,何广平.倒立摆的一种新的控制方法[J].北方工业大学学报,2007,4(3):26-30.[16] 李贤涛,张葆,赵春蕾,等.基于自适应的自抗扰控制技术提高扰动隔离度[J].吉林大学学报(工学版),2015,6(1):202-208.。
滑模控制二阶倒立摆 matlab滑模控制是一种常用的控制方法,在控制二阶倒立摆中也可以得到很好的应用。
通过加入滑模控制器可以提高控制系统的稳定性和鲁棒性。
在 Matlab 中,可以使用 Simulink 来进行二阶倒立摆的仿真和控制器设计。
具体步骤如下:1. 搭建二阶倒立摆的模型,包括小车、摆杆和配重块等组成部分。
2. 设计 PID 控制器,作为基准控制器用于比较滑模控制器的性能;3. 按照滑模控制器设计的思路,搭建滑模控制器模型,其中包括滑模面、滑模控制律等组成部分。
4. 将滑模控制器与二阶倒立摆模型进行连接,并进行仿真。
实现过程中的代码如下:1. 建立模型:使用 Simulink 中的组件、信号源、仿真器等构建二阶倒立摆控制系统模型。
2. PID 控制器设计:```matlabKp = 1.5;Ki = 0.01;Kd = 0.2;pid_controller = pid(Kp, Ki, Kd);```3. 滑模控制器设计:```matlabs = 0.1;r = 0.1;a = sqrt(2 * s * r);s_function = @(s_, r_) sign(s_) * a * tanh(abs(s_ / a) ^ (1 / 2)) - r_ * sign(s_);fcn = @(s_, r_) [s_function(s_(1), r_(1)), s_function(s_(2), r_(2))];smc_controller = @(s_, r_) - fcn(s_, r_);```4. 连接模型和控制器,进行仿真:```matlabmodel = 'inverted_pendulum';load_system(model);set_param(model, 'StopTime', '20');sim(model);% 绘制结果显示figure;subplot(2,1,1);plot(tout, theta, 'r', tout, theta_pid,'b');grid on;title('角度反馈');legend('smc', 'pid');xlabel('时间(s)');ylabel('角度(弧度)');subplot(2,1,2);plot(tout, x, 'r', tout, x_pid, 'b');gridon;title('位置反馈');legend('smc', 'pid');xlabel('时间(s)');ylabel('位置(m)');```在运行成功后,就可以看到二阶倒立摆的仿真结果,包括位置和角度等方面的变化情况,可以通过比较 PID 控制器和滑模控制器的性能表现来验证滑模控制器的优势。
二阶倒立摆的稳定性控制
摘要:本文研究了二阶倒立摆系统的控制方法,采用极点配置、LQR最优控制设计了控制器,通过仿真,分析指出各种方法的优缺点。
在极点配置法中,通过仿真实验寻优,得到具有较好稳定性的初始值。
在LQR最优控制器的设计中,采用仿真结果表明:该控制策略能满足系统的控制要求,系统具有良好的动态性能。
关键词:二阶倒立摆极点配置LQR最优控制
倒立摆系统是应用于自动控制理论的经典实验装置,是一个复杂的多变量、高度非线性、强耦合和快速运动的绝对不稳定系统,对于倒立摆的稳定性控制,不仅有重要的理论意义,而且还有很重要的工程意义。
一方面倒立摆系统成本低廉,结构简单,物理参数和结构容易调整的优点,在实验条件下容易实现。
对于倒立摆的控制会涉及控制中的许多关键问题,如镇定问题、跟踪问题、随动问题、非线性问题、及鲁棒性问题。
另一方面,任何重心在上,支点在下的控制问题都可以近似于倒立摆系统,如机器人行走的平衡问题,火箭发射的垂直控制和卫星飞行中的姿态控制等。
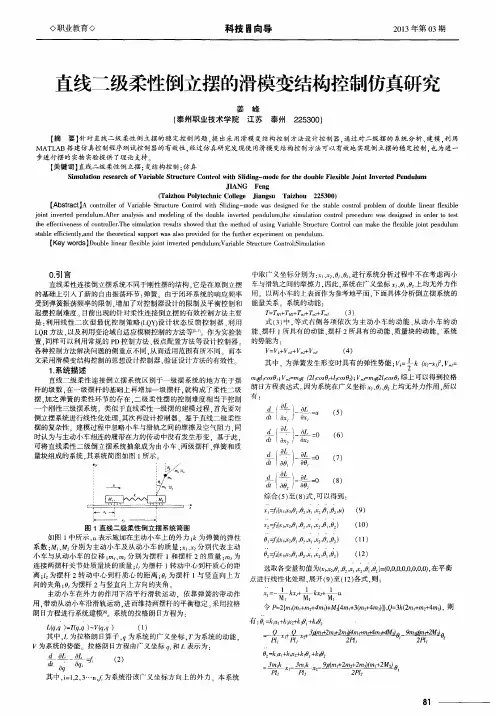
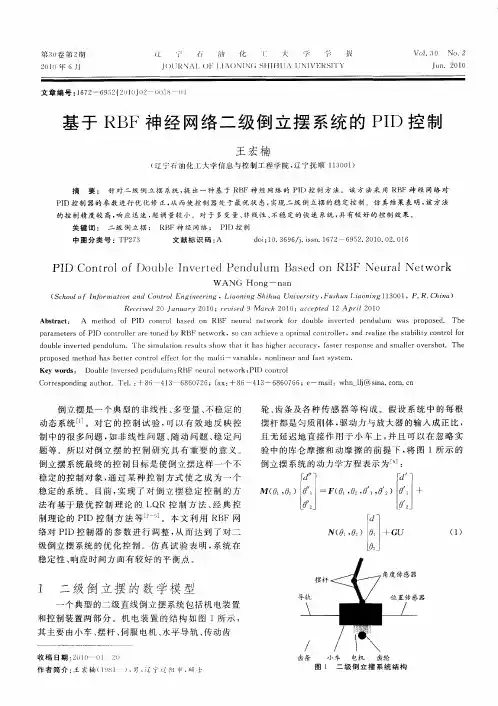
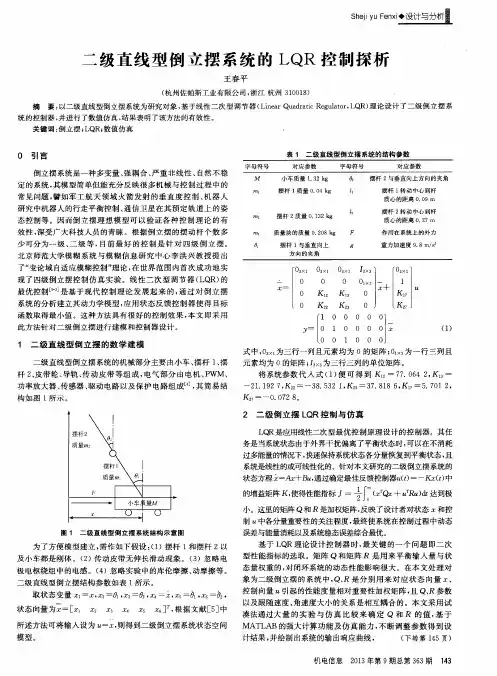
1 二阶倒立摆系统
二阶倒立摆系统的机械部分主要由小车、摆杆1,2、导轨、皮带轮、传动皮带等组成,电气部分由电机、功率放大器、PWM、传感器、驱动电路以及保护电路组成。
1.1 二阶倒立摆的数学模型[1]
假设:摆杆及小车为刚体;皮带轮及皮带间无相对滑动,皮带无伸长;小车的驱动力与直流放大器的输入成正比,且无滞后;忽略电极电枢绕组中的电感、库仑摩擦、动摩擦。
系统各参数如下。
M(小车质量)为1.32kg;m1(摆杆1质量)为0.04kg;m2(摆杆2质量)为0.132kg;m3(质量快的质量)为0.208kg;l1(摆杆1转动中心到杆心的距离)为0.09m;l2(摆杆2转动中心到杆心的距离)为0.27m;(摆杆1与垂直方向的夹角);(摆杆2与垂直方向的夹角);F(作用在系统上的外力);g(重力加速度)为9.8。
2 控制设计及仿真
2.1 用极点配置设计伺服系统
设计要求:二阶倒立摆尽可能的保持倒立垂直()。
指标要求:在小车的阶跃响应中,有4~5s的调整时间和0.15~0.16的最大超调量。
通过Matlab计算得到的一对期望极点为和,其他极点为-7.5、-7.5、-7.5、-7.5、-7.5(远离主导闭环极点对的5倍),在实际仿真实验中若其他极点选择远离主导闭环极点对4倍或者8倍最后得到的响应曲线都不如5倍的更优。
由状态方程并通过Matlab软件进行仿真得到相应的响应曲线。
从上面的仿真结果所得到的图形,作用在小车上的输入为单位阶
跃信号,即=1m,且所有的初始条件为零。
的阶跃响应正如所希望的那样,在,最大超调量小于0.15,设计满足要求。
从x1的响应曲线可以看出,在大约2.5s后小车位置就开始趋于平衡状态。
从x2的响应曲线可以看出,在0~0.3s内,摆杆1向左摆动;在0.3~1s内,摆杆向右摆动;在1~2.5s内,摆杆1又向左摆动;在2.5~3.5s内,摆杆1向右有轻微的摆动;在大概3.5s左右,摆杆趋于平衡状态。
从x3的响应曲线,在开始0~0.3s基本保持平衡,后面的摆动情况x2的情况很接近(如图2)。
2.2 LQR控制器设计及仿真
设计要求:摆尽可能的保持倒立垂直(),且小车在某位置保持平衡状态。
通过Matlab软件求得二阶倒立摆系统的特征值分别为-9.5972、-4.7725、9.5972、4.7725、0、0。
由系统的特征值可以知道系统有两个正实根,因此开环系统是不稳定的。
系统的能控性矩阵和能观性矩阵的秩均为系统的阶数6,则系统能控、能观。
取对角矩阵,(Q矩阵通过实验法进行了改进)则得到相应的反馈向量K=[7.0711126.9919-227.601912.62264.1116-35.7904]。
通过SIMULINK仿真可以得到位置、小车速度、角度1,角度2、角度1的速度及角度2的速度响应曲线如图3所示。
从仿真曲线可得:小车的位置在开始0~6s会有左右的摆动,在大约6s左右小车开始处在平衡状态(离原点0.2m左右)。
小车的车速在0~5s左右有变化,在
5s左右开始变为0。
小车开始处于平衡状态。
摆杆1、2的角度在0~4s左右有波动,在大约4s左右开始为0,说明此时摆杆开始处于垂直的平衡状态。
以上的分析说明:通过LQR控制器来控制二阶倒立摆的效果达到满意程度,系统可控。
3 结论
采用极点配置设计伺服系统和LQR控制器来实现二阶倒立摆稳定性控制,利用MATLAB及SIMULINK进行仿真,最后实现了设计要求。
在极点配置设计伺服系统过程中,极点的配置采用经典的二阶系统极点配置公式,得到主导闭环极点对后,其他极点的位置远离主导闭环极点对的5倍。
在LQR控制器的设计过程中,对Q(对角阵)的选取基本上是依靠经验来选取,经过反复的仿真实验验证得知Q的选取符合要求,实现了二阶倒立摆控制。
参考文献
[1]王海英,袁丽英,吴勃.控制系统的MATLAB仿真与设计[M].高等教育出版社,2009,2.
[2]颜文俊,陈素琴,林峰.控制理论CAI教程[M].科学出版社,2011,7.
[3]刘琛.二阶倒立摆系统的稳定控制研究[D].西安交通大学硕士论文,2007.
[4]雷源春,师路欢.基于滑块变结构控制的二阶倒立摆实验仿真研究[J].科技教育创新,2011(7).。