港口起重机雷达防撞系统的信号处理电路的设计
- 格式:pdf
- 大小:165.82 KB
- 文档页数:3

• 56•随着岸桥大型化,智能化的发展,其防撞系统也需要不断升级。
本文对各种常规岸桥防撞系统进行分析研究,详细介绍了激光扫描传感器的在岸桥防撞系统的应用。
岸边集装箱起重机(以下简称岸桥)防撞系统包括大梁防撞系统和大车防撞系统。
功能是在大车运行过程中,保护大梁机构和大车机构不与障碍物碰撞。
随着船舶和岸桥大型化的发展,大梁和大车车道数量不断增加,船桅杆或雷达越来越高,同时作业的船舶、集卡数量越来越多,碰撞风险都大大增加。
而司机在司机室很难准确判断障碍物情况,就需要岸桥防撞系统发挥作用,避免碰撞事故。
岸桥防撞系统在不断发展升级,从机械、感应限位发展到激光扫描传感器(以下简称激光限位),防撞性能不断提高。
1 大梁防撞系统1.1 采用防撞钢丝如图1所示,前大梁两侧安装防撞钢丝,与大梁外侧面平行,满足安全要求。
1.2.1 大梁上平面斜角度安装如图2所示,激光限位安装在大梁中部上平面,大梁下平面以下0.8m 为保护拖令、拖链、滑触线等相关机构,同时根据激光限位安装高度1.1m 和大梁高度1.8m ,以及上面计算得出的8m 和4m 的减速、停止距离,计算出激光限位的安装角度,角度θ≈47.23°,同岸边集装箱起重机防撞系统分析与研究上海振华重工(集团)股份有限公司 梁 明图1 大梁防撞钢丝两者间距1896mm ,当大车运行时,防撞钢丝碰到了障碍物后,端部张紧架的弹簧会带动限位挡块动作,岸桥电控PLC 接受到限位信号后停止大车运行,避免大梁碰撞。
优点是安装调试简单;缺点是保护距离太短,没有减速功能。
1.2 采用激光限位常规采用SICK 品牌的LMS511-11100Lite 的激光限位,扫描角度可达到190°,测量有效距离0.5m-80m 。
工作原理是利用发出激光通过按一定速率旋转的三棱镜折射形成一个扇形面域,根据需要设置面域的保护区域,当有障碍物时,系统检测到激光能量发生衰减后输出信号可以由高电平直流24V 变为低电平直流0V (也可以软件设置由低电平变为高电平)。
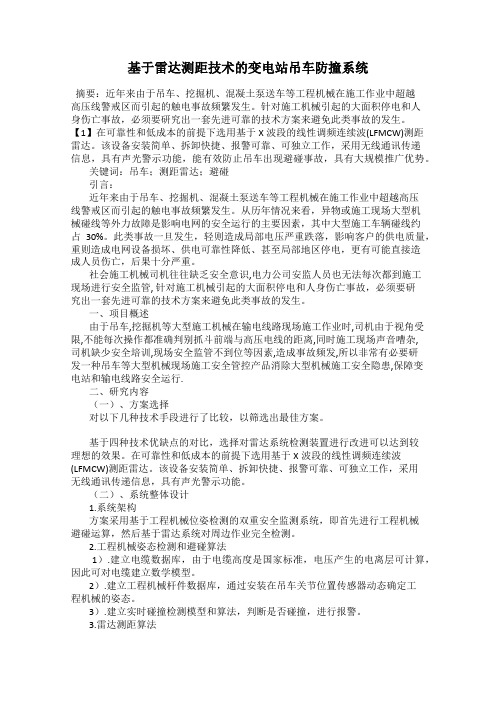
基于雷达测距技术的变电站吊车防撞系统摘要:近年来由于吊车、挖掘机、混凝土泵送车等工程机械在施工作业中超越高压线警戒区而引起的触电事故频繁发生。
针对施工机械引起的大面积停电和人身伤亡事故,必须要研究出一套先进可靠的技术方案来避免此类事故的发生。
【1】在可靠性和低成本的前提下选用基于X波段的线性调频连续波(LFMCW)测距雷达。
该设备安装简单、拆卸快捷、报警可靠、可独立工作,采用无线通讯传递信息,具有声光警示功能,能有效防止吊车出现避碰事故,具有大规模推广优势。
关键词:吊车;测距雷达;避碰引言:近年来由于吊车、挖掘机、混凝土泵送车等工程机械在施工作业中超越高压线警戒区而引起的触电事故频繁发生。
从历年情况来看,异物或施工现场大型机械碰线等外力故障是影响电网的安全运行的主要因素,其中大型施工车辆碰线约占30%。
此类事故一旦发生,轻则造成局部电压严重跌落,影响客户的供电质量,重则造成电网设备损坏、供电可靠性降低、甚至局部地区停电,更有可能直接造成人员伤亡,后果十分严重。
社会施工机械司机往往缺乏安全意识,电力公司安监人员也无法每次都到施工现场进行安全监管, 针对施工机械引起的大面积停电和人身伤亡事故,必须要研究出一套先进可靠的技术方案来避免此类事故的发生。
一、项目概述由于吊车,挖掘机等大型施工机械在输电线路现场施工作业时,司机由于视角受限,不能每次操作都准确判别抓斗前端与高压电线的距离,同时施工现场声音嘈杂,司机缺少安全培训,现场安全监管不到位等因素,造成事故频发,所以非常有必要研发一种吊车等大型机械现场施工安全管控产品消除大型机械施工安全隐患,保障变电站和输电线路安全运行.二、研究内容(一)、方案选择对以下几种技术手段进行了比较,以筛选出最佳方案。
基于四种技术优缺点的对比,选择对雷达系统检测装置进行改进可以达到较理想的效果。
在可靠性和低成本的前提下选用基于X波段的线性调频连续波(LFMCW)测距雷达。
该设备安装简单、拆卸快捷、报警可靠、可独立工作,采用无线通讯传递信息,具有声光警示功能。

雷达信号处理课程设计一、教学目标本课程的教学目标是使学生掌握雷达信号处理的基本原理和方法,能够运用所学知识分析和解决实际问题。
具体目标如下:1.知识目标:学生能够了解雷达信号处理的基本概念、原理和方法,掌握线性信号处理、非线性信号处理、滤波器设计等核心知识。
2.技能目标:学生能够运用MATLAB等工具进行雷达信号处理的基本运算和分析,具备一定的实践能力。
3.情感态度价值观目标:学生能够认识雷达信号处理在国防、通信等领域的应用价值,培养对雷达信号处理的兴趣和热情。
二、教学内容本课程的教学内容主要包括以下几个部分:1.雷达信号处理基本概念:雷达系统、信号与系统、信号处理的基本任务。
2.线性信号处理:傅里叶变换、离散傅里叶变换、滤波器设计、信号检测。
3.非线性信号处理:非线性系统的特性、非线性信号处理方法、非线性滤波器设计。
4.雷达信号处理应用:雷达侦察、雷达跟踪、雷达成像等。
三、教学方法为了实现教学目标,我们将采用以下教学方法:1.讲授法:通过讲解雷达信号处理的基本概念、原理和方法,使学生掌握相关知识。
2.讨论法:学生进行小组讨论,培养学生的思考能力和团队合作精神。
3.案例分析法:分析实际案例,使学生了解雷达信号处理在实际应用中的作用。
4.实验法:通过MATLAB等工具进行实验,培养学生动手能力和实践能力。
四、教学资源为了支持教学内容和教学方法的实施,我们将准备以下教学资源:1.教材:《雷达信号处理教程》等。
2.参考书:《雷达信号处理技术》等。
3.多媒体资料:教学PPT、视频、动画等。
4.实验设备:计算机、MATLAB软件、信号发生器等。
五、教学评估本课程的评估方式包括平时表现、作业和考试三个部分,各部分所占比例分别为40%、30%和30%。
具体评估方式如下:1.平时表现:通过课堂提问、小组讨论等环节,评估学生的参与程度和思考能力。
2.作业:布置适量作业,评估学生的知识掌握和应用能力。
3.考试:期末进行闭卷考试,评估学生对课程知识的全面掌握。

港口门座起重机的安全防撞装置和人员保护措施港口门座起重机作为港口重要的载货设备之一,在货物装卸过程中的安全性尤为重要。
为了保障起重机运行的安全,必须配备有效的防撞装置和人员保护措施。
本文将对港口门座起重机的安全防撞装置和人员保护措施进行详细介绍。
安全防撞装置是港口门座起重机的重要组成部分,通过减缓或避免意外碰撞,确保起重机本身和周围环境的安全。
常见的安全防撞装置包括限位装置、碰撞保护装置和智能监控系统。
首先,限位装置是防止起重机在运行过程中超越事故临界点的重要装置。
它通过设置高度限位开关、重量限位开关和行程限位开关等来实现。
当起重机的高度、重量或行程超出安全范围时,限位装置会自动停止起重机的运行,避免事故的发生。
其次,碰撞保护装置是一种通过监测和检测起重机的周围环境来防止碰撞的安全装置。
它常用的传感器包括激光传感器、红外线传感器和雷达传感器等。
这些传感器能够实时监测起重机周围的物体和障碍物,并发出警报或自动停止起重机的运行,以避免碰撞事故的发生。
最后,智能监控系统是一种集成了传感器、监控摄像头和控制系统的综合安全装置。
它能够实时监测起重机的运行状态、环境条件和货物装卸过程中的安全性,并及时预警和报警。
智能监控系统还可以通过与人员保护措施的结合,确保起重机工作区域内人员的安全。
除了安全防撞装置,港口门座起重机还需要配备相应的人员保护措施,以确保起重机运行中人员的安全。
常见的人员保护措施包括安全防护网、安全通道和人员定位系统。
首先,安全防护网是一种用于围护起重机工作区域的安全设施,主要用来防止人员误入危险区域。
安全防护网应当设置在离起重机运行轨迹一定距离的位置,有效地保护工作人员不会被起重机运动部件的横移或起升操作带来的风险。
其次,安全通道是一种专门为工作人员进出起重机工作区域而设置的通道。
安全通道应当符合相应的安全标准,并设置在离起重机运行轨迹一定距离的位置。
通过设置安全通道,能够有效地控制工作人员的活动范围,减少人员在起重机运行过程中的风险。

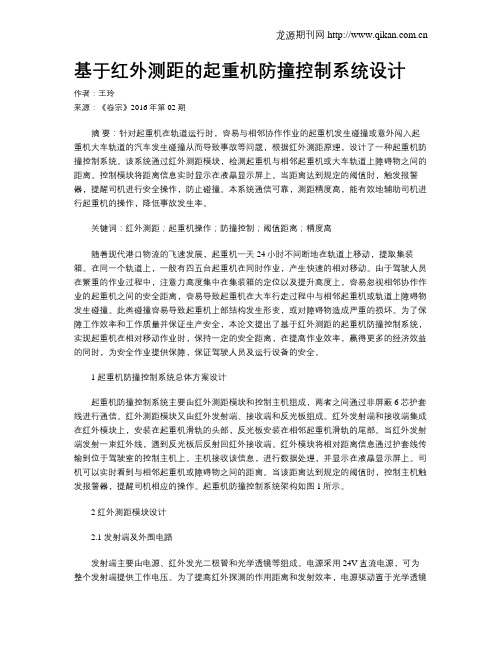
基于红外测距的起重机防撞控制系统设计作者:王玲来源:《卷宗》2016年第02期摘要:针对起重机在轨道运行时,容易与相邻协作作业的起重机发生碰撞或意外闯入起重机大车轨道的汽车发生碰撞从而导致事故等问题,根据红外测距原理,设计了一种起重机防撞控制系统。
该系统通过红外测距模块,检测起重机与相邻起重机或大车轨道上障碍物之间的距离。
控制模块将距离信息实时显示在液晶显示屏上。
当距离达到规定的阈值时,触发报警器,提醒司机进行安全操作,防止碰撞。
本系统通信可靠,测距精度高,能有效地辅助司机进行起重机的操作,降低事故发生率。
关键词:红外测距;起重机操作;防撞控制;阈值距离;精度高随着现代港口物流的飞速发展,起重机一天24小时不间断地在轨道上移动,提取集装箱。
在同一个轨道上,一般有四五台起重机在同时作业,产生快速的相对移动。
由于驾驶人员在繁重的作业过程中,注意力高度集中在集装箱的定位以及提升高度上,容易忽视相邻协作作业的起重机之间的安全距离,容易导致起重机在大车行走过程中与相邻起重机或轨道上障碍物发生碰撞。
此类碰撞容易导致起重机上部结构发生形变,或对障碍物造成严重的损坏。
为了保障工作效率和工作质量并保证生产安全,本论文提出了基于红外测距的起重机防撞控制系统,实现起重机在相对移动作业时,保持一定的安全距离,在提高作业效率,赢得更多的经济效益的同时,为安全作业提供保障,保证驾驶人员及运行设备的安全。
1 起重机防撞控制系统总体方案设计起重机防撞控制系统主要由红外测距模块和控制主机组成,两者之间通过非屏蔽6芯护套线进行通信。
红外测距模块又由红外发射端、接收端和反光板组成。
红外发射端和接收端集成在红外模块上,安装在起重机滑轨的头部,反光板安装在相邻起重机滑轨的尾部。
当红外发射端发射一束红外线,遇到反光板后反射回红外接收端。
红外模块将相对距离信息通过护套线传输到位于驾驶室的控制主机上。
主机接收该信息,进行数据处理,并显示在液晶显示屏上。
锯齿波FMCW汽车防撞雷达信号处理系统研究【摘要】汽车防撞雷达的研究与开发是解决日益增加的高速公路交通事故的有效途径,国内对汽车防撞雷达的研制目前还处于理论研究与实验调试阶段。
信号处理系统是防撞雷达系统的核心与技术难点,对其进行深入的研究与开发有深远意义。
本文结合实际工程项目,介绍了一种锯齿波FMCW体制汽车防撞雷达信号处理系统的工作原理与工程实现方法,并给出了系统调试与外场实验结果。
原理分析方面,重点介绍了锯齿波FMCW信号处理原理以及距离多普勒处理方法;工程实现方面,首先对信号处理系统FPGA+DSP硬件架构做了描述,分析了硬件系统中各主要器件的技术参数与选型标准,介绍了部分电路的原理图设计结果,对关键电路的信号完整性进行了仿真,运用Cadence 软件设计完成了信号处理PCB板;FPGA与DSP的软件设计是信号处理系统软件设计重点,根据FPGA与DSP各自不同的功能划分,分别对FPGA主要模块以及DSP主要算法程序的设计思想、功能等进行了介绍,并完成FPGA时序仿真与DSP算法仿真;信号处理系统硬软件调试与外场实验是工程项目的重要工作内容,文中分析了系统调试的过程与结果,最后对外场实验得到的主要结论进行了阐述。
更多还原【Abstract】 Research and development of the automotiveanti-collision radar is an effective way to solve the increasing car traffic accidents, domestic automotiveanti-collision radar development is still in the theoreticalresearch and experimental commissioning stage. Signal processing system is the core and technical difficulty of anti-collision radar system, its in-depth research and development has far-reaching significance.Considering the actual engineering project, this paper introduces the working p... 更多还原【关键词】防撞雷达;锯齿波;信号处理;FPGA;DSP;【Key words】Anti-collision Radar;STW;Signal Processing;FPGA;DSP;摘要3-4Abstract 4第一章绪论8-101.1 论文研究背景和意义81.2 国内外研究现状8-91.3 论文主要工作与章节安排9-10第二章信号处理基本原理及信号处理系统工作原理10-282.1 锯齿波FMCW 信号分析10-132.2 锯齿波FMCW 信号处理基本原理13-152.2.1 雷达接收数据存储方式13-142.2.2 信号处理基本原理14-152.3 信号处理系统工作原理15-242.3.1 信号处理系统技术指标15-162.3.2 信号处理流程及信号处理系统工作原理16-242.4 算法仿真24-282.4.1 仿真参数设置25-262.4.2 仿真结果26-28第三章信号处理系统硬件设计28-463.1 数据采集电路28-303.1.1 抗混叠滤波电路、运放电路293.1.2 A/D 变换器电路29-303.2 时钟电路30-313.2.1 60MHz 基准时钟30-313.2.2 晶振G1、G2 时钟313.3 数字信号处理器与FPGA 31-343.3.1 数字信号处理器31-323.3.2 FPGA 32-333.3.3 DSP 与FPGA 外挂存储器33-343.4 通信接口与状态指示灯电路34-363.4.1 CAN 总线接口34-353.4.2 RS232 与RS422 接口电路35-363.4.3 状态指示灯电路363.5 电源要求与功耗分析36-383.5.1 电源要求分析36-373.5.2 实现方法与电路37-383.6 PCB 设计38-463.6.1 Cadence16.0 简介393.6.2 PCB 设计约束分析39-403.6.3 PCB 布局40-413.6.4 PCB 布线413.6.5 PCB 电磁兼容(EMC)设计41-423.6.6 PCB 仿真示例42-433.6.7 PCB 实现43-46第四章信号处理系统软件设计46-604.1 软件设计总体考虑46-484.1.1 实现方法46-474.1.2 软件的组织和时序474.1.3 运算时间和存储量估计47-484.2 FPGA 软件设计48-534.2.1 FPGA 设计基本要素484.2.2 DCM 时钟模块设计48-494.2.3 译码模块、定时模块设计49-504.2.4 A/D 接口模块、FIFO 模块设计50-514.2.5 UART 模块设计51-534.3 DSP 软件设计53-604.3.1 DSP 集成开发、设计环境53-554.3.2 DSP 程序设计流程55-574.3.3 DSP 算法CCS 软仿真57-60 第五章系统调试与外场实验60-705.1 信号处理系统调试60-655.1.1 调试平台60-615.1.2 硬件调试61-625.1.3 软件调试62-655.2 系统联调65-665.3 外场实验66-705.3.1 实验结果66-685.3.2 实际问题分析68-70结束语70-71致谢71-72参考文献。
基于超声测距雷达的船艇智能防碰撞预警系统设计张伟摘要:针对船艇航行中的碰撞事故,设计了以单片机为核心,结合自动舵系统的船艇智能防碰撞雷达预警系统,利用超声波实现无接触测距;结合自动舵系统自动减速减速;同时配备语音报警功能。
关键词:测距雷达,超声波,单片机,减速。
0 引言:随着水运产业的快速发展,近年来我国的船艇使用率日益增长,流量越来越大,船艇碰撞事故也越来越多。
特别是狭水道航行中,船速较高,驾驶员长途驾驶容易疲劳。
因此,增强船艇的自动控制能力,研制船艇自动避碰雷达系统便成为近些年来的研究热点。
快速、准确地测量障碍物与船艇之间的距离是安全避免障碍物的前提。
为此,设计了以单片机为核心,利用超声波实现无接触式测距的雷达系统实时测距,并结合自动舵系统避免可能发生的碰撞。
1 超声波测距原理:超声波测距主要是利用超声波的反射特性进行测距。
超声波发射器不断的产生超声波,超声波通过介质到达物体表面,遇到障碍物后形成反射波,反射波再经介质传播返回到接收器,由超声波接收器把声波信号转换成电信号,传入单片机测距系统。
超声波测距的方法有很多,如渡越时间法、相位检测法、声波幅值检测法。
考虑到检测距离比较长,本系统采用渡越时间法。
即:L=ct /2(1)式中,L 为超声波测距设备与障碍物间的距离,单位(m);c为声速,单位(m/s);t 为第一个回波到达的时刻与发射脉冲之间的时间差,单位(s)。
2 系统结构及工作原理系统由STC89C52 单片机、超声波发射电路、超声波接收电路、减速电路和语音电路组成。
系统整体结构如图1 所示。
系统采用收发异体的超声波传感器。
当单片机STC89S52接到外部启动测距的命令后,立即控制NE555 产生40kHz 的频率信号来驱动超声波传感器,每次发射包含10 个脉冲,当第一个超声波脉冲发射后,计数器开始计数。
当检测到第一个回波脉冲的瞬间,计数器停止计数,这样能够得到从发射到接收的时间t。
利用公式(1)来计算距离。
雷达信号处理技术课程设计前言雷达(Radar)是一项重要的电子技术,广泛应用于军事、民用、科学等领域。
随着科技的进步和应用的扩大,对雷达信号处理技术的要求也越来越高。
本文将从基本原理入手,介绍雷达信号处理技术的相关知识,以及一个具体的课程设计案例。
知识基础雷达的基本原理雷达是通过发射高频电磁波,利用目标反射回来的电波信号,来获取目标的位置、速度和特征等信息。
雷达由发射机、接收机、天线、信号处理和指挥控制系统等组成。
雷达信号处理技术是指对接收的雷达信号进行处理,以提取信号中的有效信息,从而实现对目标的识别、分类、跟踪等功能。
雷达信号处理技术的基本流程雷达信号处理技术一般包括以下几个步骤:1.预处理:对接收到的雷达信号进行放大、滤波、去噪等处理,以提高信号质量和信噪比;2.目标检测:对预处理后的信号进行阈值处理,以检测信号中是否存在目标;3.目标跟踪:对检测到的目标进行跟踪,以获取目标位置和速度的变化;4.特征提取:从目标信号中提取特征,如雷达截面积、速度和航向等,以用于目标识别和分类;5.目标识别:根据目标特征所属类别进行分类,以实现对多种目标的识别和区分。
课程设计案例课程设计要求在硬件平台为PILOT开发板的前提下,完成一个小型化的MIMO雷达系统的设计,实现以下要求:1.能够对周围环境进行感知,实时反馈环境中存在的目标识别、跟踪等信息;2.支持对多种目标进行识别和分类;3.设备小巧、性能优异、易于携带。
设计方案本设计方案采用基于ZYNQ系列FPGA的Spectrum控制器和两个正交的Ka频段天线,以实现MIMO雷达系统的设计。
具体流程如下:步骤一:预处理经过天线接收的复杂信号进行调制,并进行预处理,去除噪声和杂波干扰,增强目标反射信号。
将预处理后的信号送入数字信号处理(DSP)模块。
步骤二:目标检测利用DSP模块中的一些模式匹配算法,对经过预处理后的雷达信号进行处理分析,以判断信号中是否存在目标。